炒菜颠锅装置及其仿真控制方法
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及自动烹调技术领域,特别是一种炒菜颠锅装置及其仿真控制方法。
背景技术
传统的中餐烹饪,为增加菜肴口味厚重感,某些菜品需要爆炒时常需抛炒或翻炒,俗称“掂勺”或“颠锅”,使锅中的食物在锅中翻动并散开,达到使食物均匀受热的效果,食物口感更佳。随着技术的发展,自动化烹调技术应用越来越广,但是对于炒菜颠锅的操作,市面上目前还缺乏能真正仿真模拟出颠锅操作的装置,或者有人设计出一些模拟颠锅操作的装置,但是结构太复杂,导致在市面上没能真正推广应用。
发明内容
为了克服现有技术的不足,本发明提供一种炒菜颠锅装置及其仿真控制方法。
本发明解决其技术问题所采用的技术方案是:提供一种炒菜颠锅装置,包括支座、锅具,所述支座、所述锅具之间通过机械臂连接;所述机械臂上设置有第一旋转点和第二旋转点,所述支座与所述机械臂之间通过所述第一旋转点连接,所述第一旋转点设置有转轴使所述机械臂相对于所述支座可旋转,所述锅具与所述机械臂之间通过所述第二旋转点连接,所述第二旋转点设置有转轴使所述锅具相对于所述机械臂可旋转;还包括有第一控制装置用于控制第一旋转点,还包括有第二控制装置用于控制所述第二旋转点。
根据本发明所提供的炒菜颠锅装置,通过采用第一旋转点和第二旋转点共同控制炒菜颠锅过程,相当于两个自由旋转结构实现颠锅效果,不但结构简单易用,而且模拟效果更灵活。
作为本发明的一些优选实施例,所述第一旋转点与所述第二旋转点之间的连线为所述机械臂的延伸线方向,所述第一旋转点的所述转轴延伸方向与所述机械臂的延伸线方向垂直,所述第二旋转点的所述转轴延伸方向与所述机械臂的延伸线方向垂直。
作为本发明的一些优选实施例,所述第一控制装置为第一旋转电机,所述第二控制装置为第二旋转电机;所述第一旋转电机设置在所述第一旋转点上,所述第二旋转电机设置在所述第二旋转点上。
作为本发明的一些优选实施例,所述第一控制装置为第一旋转电机,所述第二控制装置为第二旋转电机;所述机械臂上设置有第一旋转联动轴,所述第一旋转电机与所述第一旋转联动轴连接;所述机械臂上设置有主动齿轮和传动齿轮,所述主动齿轮与所述传动齿轮之间通过传动带连接,所述主动齿轮与所述第二旋转电机连接,所述传动齿轮与所述第二旋转点连接。
作为本发明的一些优选实施例,所述传动齿轮上设置有第二旋转联动轴,所述第一旋转联动轴为圆筒状,所述第二旋转联动轴穿过所述第一旋转联动轴,所述第一旋转联动轴与所述第二旋转联动轴的轴线重合。
一种炒菜颠锅仿真控制方法,包括上述的炒菜颠锅装置,步骤包括:
S1.导入所述锅具、所述机械臂的三维模型;
S2.设置所述锅具、所述机械臂、所述支座之间的旋转约束及固定约束
S3.设置所述第一旋转点的速度控制曲线;
S4.设置所述第二旋转点的速度控制曲线;
S5.在所述锅具内设置粒子,并设置所述粒子的运动边界,设置所述粒子的大小、材料属性,设置所述粒子和所述锅具之间接触属性;
S6.设置分析时长及输出步数;
S7.运行,并判断仿真的颠锅效果是否符合要求。
根据本发明所提供的炒菜颠锅仿真控制方法,通过采用第一旋转点作为一个自由旋转结构控制旋转,第二旋转点作为另一个自由旋转结构控制旋转,实现控制炒菜颠锅过程的仿真模拟,不但结构简单易用,而且模拟效果更灵活。
作为本发明的一些优选实施例,通过有限元软件模拟所述炒菜颠锅仿真控制方法。
作为本发明的一些优选实施例,采用多体动力学仿真软件RecurDyn模拟所述锅具的运动轨迹,采用Particles模块圆形颗粒模拟所述锅具内所述粒子的运动轨迹。
本发明的有益效果是:新技术能在较小的空间通过两个自由旋转结构来实现更好的颠锅效果,制造成本低,空间利用率高,非常适合于厨房烹饪设备、家用电器领域,同时配合仿真控制方法,能缩短研发周期。
附图说明
下面结合附图和实施例对本发明进一步说明。
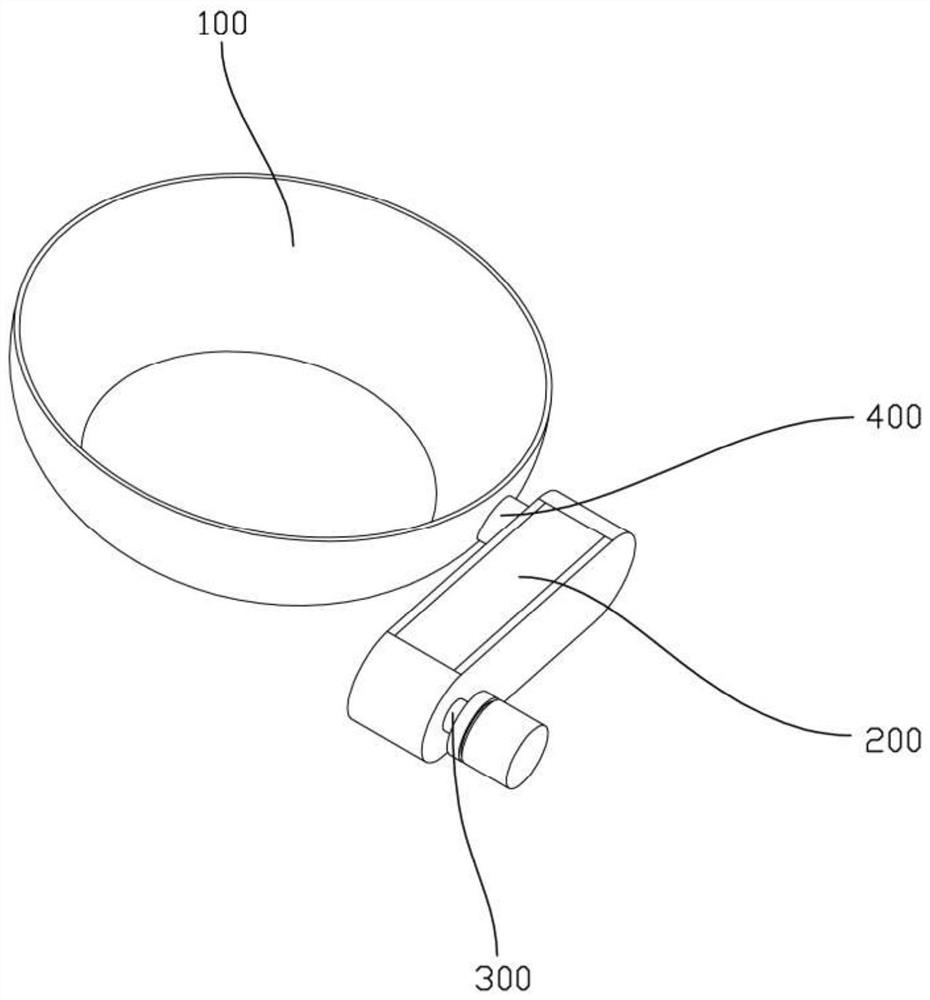
图1是本发明的立体图;
图2是本发明一个实施方式的立体图;
图3是本发明另一个实施方式的立体图;
图4是本发明中第一旋转点的时间-角位移曲线图;
图5是本发明中第二旋转点的时间-角位移曲线图;
图6是本发明中工作示意图。
附图标记:
锅具100、机械臂200、第一旋转联动轴210、第一旋转点300、第一控制装置310、第一旋转电机311、第二旋转点400、第二控制装置410、第二旋转电机411、主动齿轮412、传动齿轮413、传动带414、第二旋转联动轴415。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。为透彻的理解本发明,在接下来的描述中会涉及一些特定细节。而在没有这些特定细节时,本发明创造仍可实现,即所属领域内的技术人员使用此处的这些描述和陈述向所属领域内的其他技术人员可更有效的介绍他们的工作本质。此外需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”、“下”等指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向,相关技术人员在对上述方向作简单、不需要创造性的调整不应理解为本申请保护范围以外的技术。应当理解,此处所描述的具体实施例仅仅用以解释本申请,并不用于限定实际保护范围。而为避免混淆本发明的目的,由于熟知的制造方法、控制程序、部件尺寸、材料成分、管路布局等的技术已经很容易理解,因此它们并未被详细描述。
图1是本发明一个实施例的立体图,参照图1,本发明的一个实施例提供了一种炒菜颠锅装置,包括支座、锅具100,支座、锅具100之间通过机械臂200连接。炒菜颠锅装置工作时,支座位置基本不需要移动。支座的结构不作额外限定,具体根据炒菜颠锅装置实际情况而定。
机械臂200上设置有第一旋转点300和第二旋转点400,共两个自由旋转结构。支座与机械臂200之间通过第一旋转点300连接,第一旋转点300设置有转轴使机械臂200相对于支座可旋转。锅具100与机械臂200之间通过第二旋转点400连接,第二旋转点400设置有转轴使锅具100相对于机械臂200可旋转。
炒菜颠锅装置还包括有第一控制装置310用于控制第一旋转点300,还包括有第二控制装置410用于控制第二旋转点400。即第一旋转点300、第二旋转点400两个自由旋转结构分别通过第一控制装置310、第二控制装置410控制,进而控制机械臂200的旋转和锅具100的自转。
实际工作时,参照图6,炒菜颠锅装置通过两个自由旋转结构来控制机械臂200的旋转和锅具100的自转,实现颠锅效果。炒菜颠锅装置结构简单易用,制造成本低。炒菜颠锅装置结构空间利用率高,例如机械臂200不需要很长即可保证颠锅效果。新装置非常适合于厨房烹饪设备、家用电器领域,同时配合仿真控制方法,能缩短研发周期。
本发明的一个实施例提供了一种炒菜颠锅仿真控制方法,包括上述的炒菜颠锅装置,步骤包括:
S1.导入锅具、机械臂的三维模型;
S2.设置锅具、机械臂、支座之间的旋转约束及固定约束
S3.设置第一旋转点的速度控制曲线;
S4.设置第二旋转点的速度控制曲线;
S5.在锅具内设置粒子,并设置粒子的运动边界,设置粒子的大小、材料属性,设置粒子和锅具之间接触属性;
S6.设置分析时长及输出步数;
S7.运行,并判断仿真的颠锅效果是否符合要求,如果符合要求,则仿真控制过程结束,如果不符合要求,则更改第一旋转点和/或第二旋转点的速度控制曲线。
以下结合一些实施例进行说明,其中此处所称的“实施例”是指可包含于本申请至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。此外,表示一个或多个实施例的细节并非固定的指代任何特定顺序,也不构成对本发明的限制。
实施例1,第一旋转点300与第二旋转点400之间的连线为机械臂200的延伸线方向,第一旋转点300的转轴延伸方向与机械臂200的延伸线方向垂直,第二旋转点400的转轴延伸方向与机械臂200的延伸线方向垂直。
本实施例中,可选的,机械臂200位于支座的前侧,机械臂200位于位于锅具100后侧,第一旋转点300的转轴、第二旋转点400的转轴沿着前后侧方向延伸。
实施例2,参照图2,第一控制装置310为第一旋转电机311,第二控制装置410为第二旋转电机411。第一旋转电机311设置在第一旋转点300上,第二旋转电机411设置在第二旋转点400上。
实施例3,参照图3,第一控制装置310为第一旋转电机311,第二控制装置410为第二旋转电机411。机械臂200上设置有第一旋转联动轴210,第一旋转电机311与第一旋转联动轴210连接。机械臂200上设置有主动齿轮412和传动齿轮413,主动齿轮412与传动齿轮413之间通过传动带414连接,主动齿轮412与第二旋转电机411连接,传动齿轮413与第二旋转点400连接。
本实施例中,可选地,传动齿轮413上设置有第二旋转联动轴415,第一旋转联动轴210为圆筒状,第二旋转联动轴415穿过第一旋转联动轴210,第一旋转联动轴210与第二旋转联动轴415的轴线重合。
实施例4,炒菜颠锅仿真控制方法通过有限元软件模拟炒菜颠锅仿真控制方法,通过有限元软件仿真模拟,即可提前预知锅具性能及颠锅效果。
本实施例中,可选地,炒菜颠锅仿真控制方法采用多体动力学仿真软件Rec urDyn模拟锅具的运动轨迹,采用Particles模块圆形颗粒模拟锅具内所述粒子的运动轨迹。
设置第一旋转点300的时间-角位移曲线如图4所述(横坐标为X轴方向、纵坐标为Y轴方向)。设置第二旋转点400的时间-角位移曲线如图5所述(横坐标为X轴方向、纵坐标为Y轴方向)。设置完成后,炒菜颠锅装置就可以模拟出颠锅动作效果,如图6所示。
实施例5,步骤S7中,如果更改第一旋转点和/或第二旋转点的速度控制曲线依然无法达到想要的颠锅效果,则更改锅具的大小及形状,或者更改机械臂的第一旋转点、第二旋转点之间的距离,重新走一遍炒菜颠锅仿真控制方法的流程,直至达到想要的颠锅效果,从而减少实验成本,缩短研发周期。
根据上述原理,本发明还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。
- 炒菜颠锅装置及其仿真控制方法
- 一种具有颠锅功能的炒菜装置