一种智能健身脚踏车
文献发布时间:2023-06-19 11:24:21
技术领域
本申请涉及脚踏车的领域,尤其是涉及一种智能健身脚踏车。
背景技术
目前脚踏车是以链条为传动源,通过脚踩踏板来驱使链条带动车轮转动,最终驱动脚踏车前进,是一种绿色环保的交通工具。
相关技术中授权公告号为CN205998081U的中国专利公布了一种脚踏车,由链条形成的闭合链传动包括有第二飞轮、第三飞轮、滑轮、导向轮、传动绳,骑行时通过脚踏往复运动拉动传动绳,并带动第二飞轮或第三飞轮驱动第一转轴,然后通过链轮将运动传递至第一飞轮,从而驱动后轮转动,实现脚踏车的前行。
针对上述中的相关技术,发明人认为存在有:由于链条传动存在有传动平稳性较差,骑行时易产生顿挫感,进而导致车辆骑行时稳定性降低,使得骑行时存在一定的安全隐患。
发明内容
为了改善骑行过程中稳定性较差的问题,本申请提供一种智能健身脚踏车。
本申请提供的一种智能健身脚踏车,采用如下的技术方案:
一种智能健身脚踏车,包括有车架,转动设置在所述车架上的前轮以及后电机轮;所述车架上设置有脚踏板以及蓄电池,所述蓄电池与后电机轮电连接并用于给后电机轮供电;所述车架上还设置有与脚踏板电性连接的脚踏马达,所述脚踏马达的输出轴与脚踏板传动连接;所述脚踏马达上电性连接有扭矩传感器和霍尔传感器,所述扭矩传感器和霍尔传感器用于采集脚踏板的速度和力度;所述车架内设置有车辆控制器,所述扭矩传感器和霍尔传感器将采集到的脚踏速度和力度转化为传输信号,并输出给所述车辆控制器;所述车辆控制器连接于后电机轮的供电回路,所述车辆控制器接收到传输信号后将输出控制信号来调控后电机轮接收到的功率值大小。
通过采用上述技术方案,当用户在骑行时,脚踏板将驱动脚踏马达的输出轴转动,通过设置在脚踏马达上的扭矩传感器和霍尔传感器能采集用户脚踏的速度和力度;扭矩传感器和霍尔传感器能将采集到的物理量转换成传输信号并输送给车辆控制器;车辆控制器接收到传输信号后将对传输信号进行处理,最后车辆控制器将输出相应的控制信号来控制蓄电池给后电机轮接收到的功率值大小,进而实现对后电机轮的速度与扭矩进行控制与调节;去掉了传统脚踏车的链条传动、轴传动、同步带传动等机械类传动从而能大大提高骑行时的稳定性,降低了车辆的机械故障发生率;并且脚踏力度不受车轮反馈,能更好的适应各种路况和坡度;脚踏马达的扭矩力度还可通过车辆控制器来对扭矩力度进行调节,从而能满足不同用户的骑行需求。
附图说明
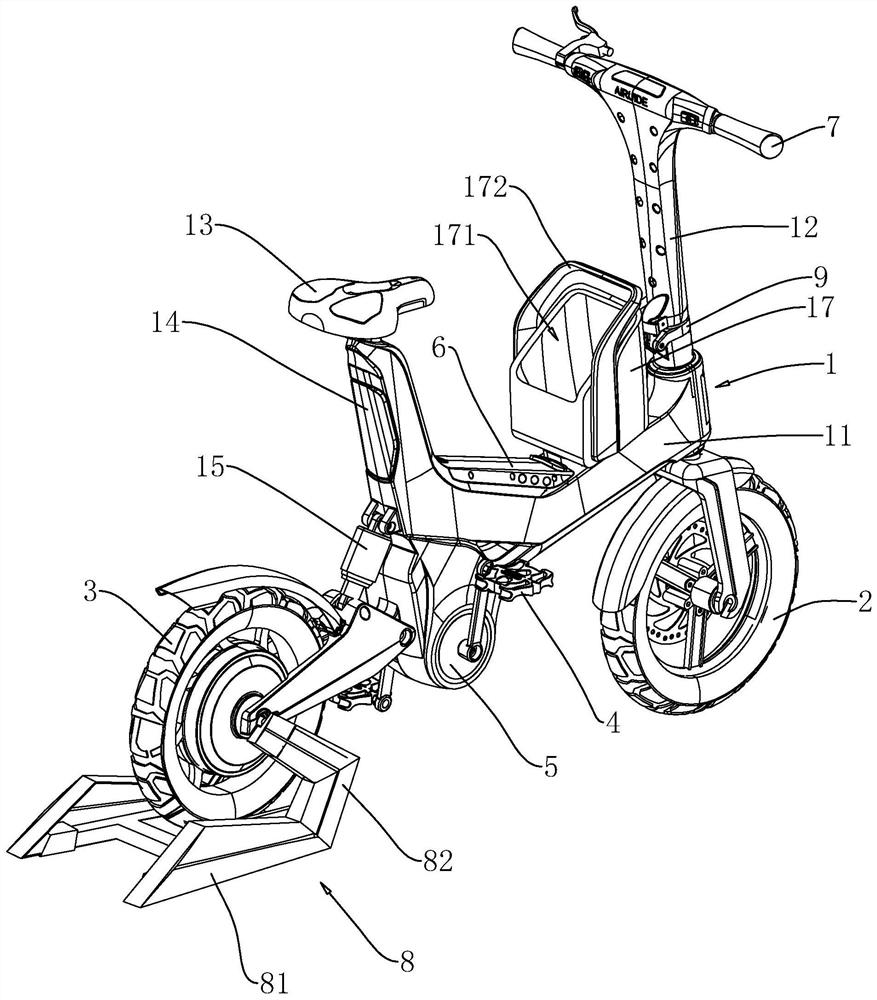
图1是本申请实施例的整体结构示意图。
图2是图1中将储物框更换为儿童座椅后的局部结构示意图。
图3是图2中踏板的整体结构示意图。
图4是图1中凸显支撑组件的整体结构示意图。
附图标记说明:1、车架;11、主架体;12、龙头把手;13、座垫架;14、尾灯;15、弹簧减震件;16、踏板;161、安装槽;17、储物框;171、储物腔;172、提拉把手;18、儿童座椅;181、扶手;2、前轮;3、后电机轮;4、脚踏板;5、脚踏马达;6、蓄电池;7、调速转把;8、支撑组件;81、底座;82、插接件;821、限位槽;83、容纳腔;9、折叠机构。
具体实施方式
以下结合附图1-4对本申请作进一步详细说明。
本申请实施例公开一种智能健身脚踏车。参照图1,智能健身脚踏车包括有车架1,车架1的前端转动安装有前轮2,车架1的后端转动安装有后电机轮3。车架1上还安装有位于前轮2与后电机轮3之间的脚踏板4、脚踏马达5以及蓄电池6。蓄电池6与后电机轮3间通过电性连接,蓄电池6用于给后电机轮3供电。通过蓄电池6输出功率给后电机轮3,进而实现后电机轮3的转动。
如图1所示,车架1包括有主架体11,脚踏板4转动设置在主架体11上,脚踏马达5的输出轴与脚踏板4的转动轴联动,并且脚踏板4与脚踏马达5之间通过电性连接。脚踏马达5上电性连接有扭矩传感器和霍尔传感器,当用户通过脚踩脚踏板4来带动脚踏马达5的输出轴转动时,扭矩传感器和霍尔传感器能采集脚踏马达5的速度以及脚踏板4给脚踏马达5输出轴施加的力度。
如图1所示,主架体11内还安装有车辆控制器,车辆控制器电连接于蓄电池6与后电机轮3的供电回路上。当用户通过脚踩脚踏板4来带动脚踏马达5的输出轴转动时,扭矩传感器和霍尔传感器将采集到的脚踏马达5速度和脚踏板4的力度转化为传输信号,并将传输信号输出给车辆控制器。车辆控制器根据接收到的传输信号进行数据分析处理后输出相应的控制信号以控制后电机轮3接收到的功率值大小。本实施例中车辆控制器可根据接收到的传输信号脉宽大小,输出相应大小的控制信号以控制蓄电池6给后电机轮3输入的功率值大小。此时车辆便可当作自行车使用,去掉了传统脚踏车的链条传动、轴传动、同步带传动等机械类传动从而能大大提高骑行时的稳定性,降低了车辆的机械故障发生率。并且脚踏力度不受车轮反馈,能更好的适应各种路况和坡度。
如图1所示,车架1还包括有安装在主架体11前端的龙头把手12,龙头把手12位于前轮2的正上方。龙头把手12下端与主架体11之间设置有折叠机构9,折叠机构9包括有设置在龙头把手12下端的折叠关节、设置在主架体11上的立管折叠关节,以及用于锁紧折叠关节与立管折叠关节的紧固件。通过将紧固件进行旋松后,便能实现将龙头把手12与主架体11之间的连接处进行折叠,方便了车身的收纳。龙头把手12上转动安装有调速转把7,调速转把7电连接于车辆控制器,通过转动调速转把7,调速转把7将根据旋转的角度输出相应的调速信号,该调速信号具体为输出相应大小的电压值。当车辆控制器接收到调速转把7输出的调速信号后,车辆控制器将根据调速信号的大小输出相应的控制信号来对蓄电池6输出给后电机轮3的功率大小进行调控,从而实现对后电机轮3的速度与扭矩进行调节。在调速转把7的作用下便可将车辆作为电动车使用,龙头把手12上还可增设按钮开关或触摸开关,一组开关用于控制脚踏马达5与蓄电池6之间的信号通断,而另一组开关则用于控制调速转把7与蓄电池6之间的信号通断。从而便能实现车辆在自行车模式与电动车模式之间的切换。用户通过转动调速转把7,调速转把7将输出调速信号给车辆控制器,最终通过车辆控制器能实现对蓄电池输出给后电机轮3的功率进行调控,调速转把7的设置能实现将车辆从脚踏车模式切换成电动车模式,进而满足了用户不同的骑行需求,当将车辆切换成电动车模式时,能使驾驶更加的省力、便捷。
如图1所示,车架1还包括有安装在主架体11后端的座垫架13,座垫架13背离前方龙头把手12的一端设置有尾灯14,尾灯14与蓄电池6电连接。通过蓄电池6来给尾灯14进行供电,尾灯14能对后方车辆起到提示的作用,进而提高了用户夜晚骑行时的安全性。座垫架13与主架体11之间安装有位于尾灯14下方的弹簧减震件15,弹簧减震件15一端与座垫架13连接,弹簧减震件15另一端与主架体11连接。当车辆行驶在颠簸路段上时,通过弹簧减震件15能起到减震缓冲的效果,进而能提高座垫架13的乘坐时的舒适性。
如图2、图3所示,为了方便供用户脚踏,主架体11上还可安装位于龙头把手12与座垫架13之间的踏板16,并且踏板16被设置在主架体11的底部。踏板16的上表面中心位置形成有朝向主架体11底部的弧形安装槽161,踏板16的中心位置通过安装槽161嵌合在主架体11上,并且安装槽161的内侧壁与主架体11的底壁相互贴合。踏板16与主架体11之间通过螺栓旋紧固定,踏板16的两端分别从主架体11的底部伸出并可供用户的脚放置。通过将用户的落脚点进行抬高进而能提高骑行时的舒适性,并且当驶过积水路段时,能减少路上的积水溅射到用户的鞋。
如图1所示,主架体11的上端面设置有位于龙头把手12与座垫架13之间的储物框17。储物框17的底部通过螺栓可拆卸安装在主架体11上,储物框17内形成有上端开口的储物腔171,储物腔171的上端开口自龙头把手12朝座垫架13的方向呈斜向下倾斜设置。储物框17的外侧壁上还固定安装有提拉把手172,提拉把手172呈拱形且上端从储物腔171的开口上端越过,当用户外出时,通过储物框17能满足用户骑行时的储物需求。
如图2、图3所示,为了满足儿童的乘坐需求,本申请还提供了一种儿童乘坐模式,包括有设置在龙头把手12与座垫架13之间的儿童座椅18。当用户需要携带儿童时,先将储物框17从主架体11上拆除,再将儿童座椅18底部通过螺栓旋紧在主架体11上,从而便能满足儿童的乘坐需求。并将儿童座椅18安装在踏板16的上方,用户在驾驶时通过将双脚放置在踏板16上,从而能将乘坐的儿童进行夹持,从而能提高驾驶时儿童的安全性。儿童座椅18朝向龙头把手12的一端固定安装有供儿童扶持的扶手181。扶手181的设置可供儿童乘坐时,双手可扶住扶手181,从而能进一步提高儿童乘坐时的安全性。
如图1、图4所示,智能健身脚踏车还包括有支撑组件8,支撑组件8包括有底座81以及一体成型在底座81上的两个插接件82。插接件82呈对称设置在底座81上表面的左右两侧,两个插接件82与底座81上表面之间共同围绕形成有供后电机轮3插入的容纳腔83。插接件82的上端设置有朝向容纳腔83的限位槽821,两个限位槽821呈相对设置。位于后电机轮3处的主架体11外侧壁上设置有朝向限位槽821的插杆,主架体11通过插杆嵌入在各自相对的限位槽821内,此时后电机轮3将在支撑组件8的作用下被架高,后电机轮3的下端与底座81的上表面之间将形成有间隔,后电机轮3处于悬空状态。在支撑组件8的作用下能实现将后电机轮3进行架高,由于后电机轮3下端与底座81之间留有间隔,此时便能将脚踏车切换为室内模式,在室内模式下脚踏车便是一台健身用动感单车,用户通过脚踩脚踏板4便能满足用户运动健身的需求。
本申请实施例一种智能健身脚踏车的实施原理为:当用户在骑行时,脚踏板4将驱动脚踏马达5的输出轴转动,通过设置在脚踏马达5上的扭矩传感器和霍尔传感器能采集用户脚踏的速度和力度。扭矩传感器和霍尔传感器将采集到的物理量转换成传输信号并输送给车辆控制器。车辆控制器接收到传输信号后将对传输信号进行处理,最后车辆控制器将输出相应的控制信号给后电机轮3,以实现对后电机轮3的速度与扭矩进行控制与调节。本申请去掉了传统脚踏车的链条传动、轴传动、同步带传动等机械类传动从而能大大提高骑行时的稳定性,降低了车辆的机械故障发生率。并且脚踏力度不受车轮反馈,能更好的适应各种路况和坡度,脚踏马达5的扭矩力度还可通过车辆控制器来对扭矩力度进行调节,从而能满足不同用户的骑行需求。调速转把7的设置能实现将车辆从脚踏车模式切换成电动车模式,进而满足了用户不同的骑行需求,当将车辆切换成电动车模式时,能使驾驶更加的省力、便捷。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种智能健身脚踏车
- 一种智能健身脚踏车