一种超薄压电陶瓷马达
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及马达技术领域,尤其涉及一种超薄压电陶瓷马达。
背景技术
随着时代和科技的进度与发展,大部分带显示屏或者需要按压的产品,比如手机、电脑、家用电器、汽车等,都需要用户和其进行互动,不仅仅是用户的输入控制,更多的时候需要产品给用户以反馈信息。长期以来,电子产品的反馈信号是声音与光,随着人类对触觉学的研究,触觉反馈逐渐成为电子产品和人类沟通的第三种语言。触觉反馈技术指用户给出一个按压或触摸信号,信号经过MCU的解读,将信号传递给芯片,芯片开始工作,根据不同的场景,发出不同的驱动给马达,马达产生振动,给予用户丰富的震感。
目前市场上的马达常用的分为三种,转子马达,线性马达和压电陶瓷马达。转子马达触觉震动器的工作原理类似于直流电机,依靠旋转产生震动,因而在Y轴和Z轴方向都能感受到震动,但是在很多应用场合,只需要某一个方向的震动感受,这样,其他方向的震动感受就变成了能量的浪费,并且转子马达响应速度慢,震动强度弱,震动体验感觉不细腻,功耗大;线性马达主要是一个由弹簧,质量块和线圈组成的弹簧系统,响应速度快,震动强度大,震动体验感觉细腻,功耗低,声学噪声小,但是其震动强度受到内部弹簧谐振频率的限制,驱动震动器的正弦波频率必须在谐振频率的附近,并且这个带宽非常窄,最好在±2Hz以内,谐振频率的细微偏移都会使其震动强度的大幅下降,震动效果减弱;压电陶瓷马达采用压电陶瓷制成,当电压加载压电陶瓷上时,陶瓷会迅速的产生形变,这种压电陶瓷材料的形变使压电陶瓷马达成为了一种响应速度更快,震动控制更精确的触觉震动器,基于压电器件的谐振频率特点,使压电陶瓷马达的驱动频率范围较宽,并且声学噪声更小,震感体验比转子马达和线性马达更强,更真实。
压电陶瓷马达作为一种全新的驱动器,以低速大转矩、大静态保持力矩、响应速度快、体积重量小、结构简单以及无电磁干扰等优点受到国内外的广泛关注,并在众多领域得到了应用。目前,由于市面上压电陶瓷马达的振动加速度较弱及安装结构刚性对其影响较大,使得陶瓷马达的应用受限。
发明内容
本发明的目的是针对现有技术的不足之处而提出一种超薄压电陶瓷马达,提供了一种加速度大且便于安装的压电陶瓷马达,打破了压电陶瓷马达安装结构刚性对其振动的影响,扩展了陶瓷马达的应用范围。
实现本发明目的技术方案是:
一种超薄压电陶瓷马达,包括压电双晶片,所述压电双晶片包括上压电陶瓷片和下压电陶瓷片,所述上压电陶瓷片和下压电陶瓷片之间设有金属基片,所述金属基片的上下表面均设有带电极设计的FPCB,所述上压电陶瓷片和下压电陶瓷片的电极与FPCB的电极相匹配对齐,实现电气互联;所述压电双晶片的一侧设有与金属基片固定连接的质量块,所述质量块与上压电陶瓷片和下压电陶瓷片之间均设有间隙。
进一步地,为了便于与质量块连接,所述金属基片的前后两侧设有连接片,所述质量块通过激光点焊工艺与连接片固定相连。
进一步地,为了适应不同产品的刚性需求,所述金属基片的材质采用不锈钢、铝合金、钛合金或镍合金。
进一步地,为了保证马达具有大的位移及加速度,所述上压电陶瓷片和下压电陶瓷片的形状为长宽比较大的细长型的长方形。
进一步地,根据客户驱动电压的大小,所述上压电陶瓷片和下压电陶瓷片采用单层或多层陶瓷,为了确保超薄,适应间隙较小的安装空间,上压电陶瓷片的总厚度和下压电陶瓷片的总厚度均控制在0.15~0.4mm,当采用多层陶瓷时,每层陶瓷的厚度在40~80um。
进一步地,为了保证压电陶瓷片具有较大的压电系数D33及D31,从而所述上压电陶瓷片和下压电陶瓷片的陶瓷配方采用PTZ5系列。
进一步地,为了便于质量块和金属基片相连,所述质量块包括分别对称设于压电双晶片前后的前块和后块以及设于压电双晶片上方的中间块,所述前块和后块通过中间块固定连接,所述前块和后块分别与金属基片固定相连。
进一步地,为了确保质量块能够增加压电体的振动冲量,所述质量块的材质选择密度较大的钨钢或不锈钢。
进一步地,为了避免外部电路与马达电极焊接造成整个马达厚度不可控,所述FPCB设有延伸至外部的电极引脚。
采用了上述技术方案,本发明具有以下的有益效果:
(1)本发明通过在金属基片上下分别安装上压电陶瓷片和下压电陶瓷片,形成压电双晶片,当交流电压加载时,压电陶瓷片的内部极化状态发生改变,产生长度和厚度方向的伸缩形变,由于上下两个压电陶瓷片的电极与FPCB的电极相匹配对齐,实现电气互联,当施加电压时,一个伸长,一个收缩,在金属基片的作用下,发生弯曲振动,从而产生震感,响应速度快;通过增设质量块,增加压电体的振动冲量,使压电振动的能量得以传递,增大马达的加速度值;采用本发明的结构设计,在安装时,直接将金属基片两端与负载固定连接,实现硬接触,扩大了压电陶瓷马达的应用范围。
(2)本发明金属基片的前后两侧设有连接片,便于与质量块相连,同时采用激光点焊固定连接片和质量片,确保两者牢固连接。
(3)本发明金属基片的材质采用不锈钢、铝合金、钛合金或镍合金,可根据不同产品的刚性需求来选择,应用范围更广。
(4)本发明上压电陶瓷片和下压电陶瓷片的形状为细长型的长方形,长宽比较大,当交流电压加载时,压电陶瓷片的长度和厚度方向的伸缩形变明显,从而保证马达具有大的位移及加速度。
(5)本发明压电陶瓷片可采用单层或多层设计,满足不同客户驱动电压的大小,使用范围广,同时厚度控制在0.15~0.4mm,采用超薄设计,对于间隙很小的安装空间同样适用。
(6)本发明压电陶瓷片的陶瓷配方采用PTZ5系列,该系列压电陶瓷片具有较大的压电系数D33及D31,压电性能优越。
(7)本发明质量块通过中块连接前块和后块,前块和后块分别与金属基片固定相连,组装方便。
(8)本发明质量块的材质选择钨钢或不锈钢,密度大,从而确保质量块能够增加压电体的振动冲量。
(9)本发明FPCB设有延伸至外部的电极引脚,可直接与外部电路相连,避免外部电路与马达电极焊接造成整个马达厚度不可控。
附图说明
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中:
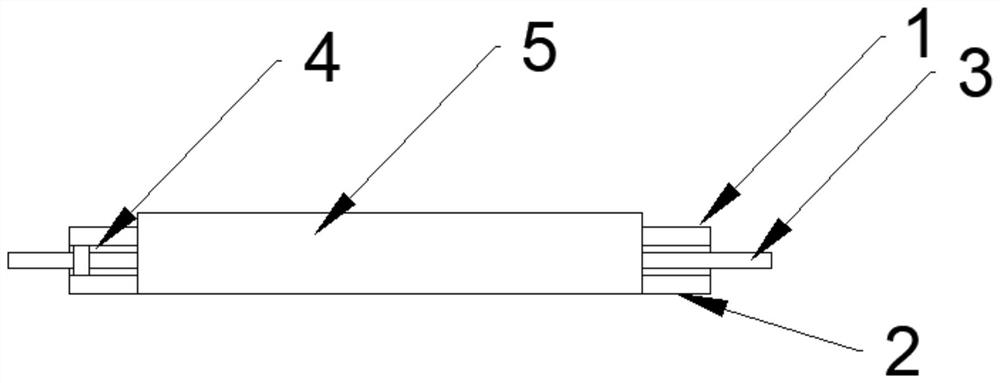
图1为本发明的主视图;
图2为本发明的俯视图;
图3为本发明的仰视图;
图4为本发明上压电陶瓷片的俯视图;
图5为本发明上压电陶瓷片的仰视图;
图6为本发明金属基片的结构示意图;
图7为本发明FPCB的结构示意图;
图8为本发明装载于手机后的加速度测试点示意图。
附图中的标号为:
上压电陶瓷片1、上压电陶瓷片第一接触区域11、上压电陶瓷片第二接触区域12、上压电陶瓷片第三接触区域13、绝缘带14、下压电陶瓷片2、金属基片3、连接片31、FPCB4、电极引脚41、FPCB第一接触区域42、FPCB第二接触区域43、质量块5、前块51、后块52、中间块53。
具体实施方式
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
(实施例1)
如图1至图7所示的超薄压电陶瓷马达,包括结构相同的上压电陶瓷片1和下压电陶瓷片2以及设于两者之间的金属基片3,上压电陶瓷片1和下压电陶瓷片2分别通过胶水与金属基片3贴合,形成压电双晶片。压电双晶片的上表面设有质量块5,质量块5与上压电陶瓷片1和下压电陶瓷片2之间均设有间隙,避免接触,同时质量块5与金属基片3固定连接。金属基片3的上下表面均附有带有电极设计的FPCB4,FPCB4为双面基材,上压电陶瓷片1和下压电陶瓷片2的电极与FPCB4的电极相匹配,实现电气互联。具体的,上压电陶瓷片1包括设于上表面的上压电陶瓷片第一接触区域11以及设于下表面的上压电陶瓷片第二接触区域12和上压电陶瓷片第三接触区域13,第二接触区域12和上压电陶瓷片第三接触区域13之间设有绝缘带14,绝缘带14为压电陶瓷片正极与负极的分割带。FPCB4上设有FPCB第一接触区域42和FPCB第二接触区域43。上表面的FPCB4与上压电陶瓷片1的具体连接情况如下:FPCB第一接触区域42与上压电陶瓷片第二接触区域12相连,FPCB第一接触区域42与金属基片3是导通的;FPCB第二接触区域43与上压电陶瓷片第三接触区域13相连,上压电陶瓷片第三接触区域13与上压电陶瓷片第一接触区域11互联,上压电陶瓷片第三接触区域13与金属基片3是断开的。下表面的FPCB4与下压电陶瓷片2的连接与其相同,最终得到结构简单、性能可靠的超薄压电陶瓷马达,在金属基片3的左右两端通过胶水粘接的方式实现马达与负载的硬接触。
上压电陶瓷片1和下压电陶瓷片2采用单层陶瓷,厚度为0.23mm,采用超薄设计,适应间隙很小的安装空间,陶瓷配方采用PTZ5系列,具有较大的压电系数D33及D31,压电性能优越。上压电陶瓷片1和下压电陶瓷片2对称粘贴在金属基片3的上下表面,形状为长宽比较大长方形,尺寸为50×6×0.23mm,当施加电压时,压电陶瓷片的长度和厚度变化明显,保证马达具有大的位移及加速度。
金属基片3的材质采用不锈钢,长度大于压电陶瓷片的长度,尺寸为62×6×0.2mm,前后两侧对称设有连接片31。质量块5的材质为不锈钢,质量为2.5g,密度大,很小体积的质量块5即可实现增加压电体的振动冲量。质量块5包括结构相同并对称设于压电双晶片前后的前块51和后块52以及设于压电双晶片上方的中间块53,前块51和后块52通过中间块53固定连接,前块51和后块52靠近压电双晶片的一侧设有与连接片31相配合的凹槽。在安装质量块5时,将金属基片3的连接片31插入凹槽内实现自组装,再通过激光点焊将连接片31与质量块5固定相连,采用这样的连接方式不仅组装方便,而且能确保连接牢固。质量块5整体采用扁平化设计,大大降低了厚度,满足超薄设计需求。
为了进一步保证马达的超薄设计,本实施例的FPCB4设有延伸至外部的电极引脚41,避免外部电路与马达电极直接焊接造成整个马达厚度不可控。
本实施例的工作原理:当交流电压加载时,压电陶瓷片的内部极化状态发生改变,产生长度和厚度方向的伸缩形变,由于上下两个压电陶瓷片的电极与FPCB的电极相匹配对齐,实现电气互联,当施加电压时,一个伸长,一个收缩,在金属基片3的作用下,发生弯曲振动,从而产生震感,响应速度快;通过增设质量块5,增加压电体的振动冲量,使压电振动的能量得以传递,增大马达的加速度值。采用本实施例的结构设计,在马达安装时,直接将金属基片3的左右两端与负载固定连接,实现硬接触即可,扩大了压电陶瓷马达的应用范围。
将实施例1的马达装载在载为质量为220g的手机后背里,并将手机放置于海棉上,加速度计放置在手机的上中下九个位置,如图8所示,给马达一个驱动,100Vpp正弦波,然后分别测试不同频率下的各个位置的加速度值,具体数值如表1所示。将现有的手机马达在同等条件下测出的加速度值见表2。
(实施例2)
实施例2结构与实施例1类似,区别在于实施例2的上压电陶瓷片1和下压电陶瓷片2采用单层陶瓷,尺寸为33×3.8×0.18mm,金属基片3的材质为钛合金,尺寸为35×4×0.15mm,质量块的材质为钨钢,质量为2.0g。实施例2测出的加速度值见表3。
(实施例3)
实施例3结构与实施例1类似,区别在于实施例3的上压电陶瓷片1和下压电陶瓷片2采用多层陶瓷,尺寸为40×2.8×0.4mm,共8层,每层陶瓷片的厚度为50um,金属基片3的材质为不锈钢,尺寸为45×3×0.15mm,质量块的材质为钨钢,质量为3.0g。实施例3测出的加速度值见表4。
综上,本发明超薄压电陶瓷马达在安装结构刚性的前提下,依然能达到较大的加速度,打破了传统压电陶瓷马达的局限。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种超薄压电陶瓷马达
- 一种超薄压电陶瓷的加工方法