一种可自动取物置物的载运机器人
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及机器人技术领域,尤其涉及一种可自动取物置物的载运机器人。
背景技术
现在市面上出现了许多具有运载功能的机器人,主要应用于大型工厂、物流等需要频繁搬运货物的场景,在一些日常的生活场景中,如餐厅、医院、超市等环境下,大型搬运机器人的使用受到限制。虽然在上述环境中,可以使用推车、移动机器人等运载工具完成一些转运的功能,但是在取物和放置物品时,依旧需要有服务人员将物品放置在推车或者机器人上,不能实现机器人的自主取物功能,且在到达需要放置物品的位置时,物品需要由使用者或者服务人员将物品取出,因此在使用过程中,现有的一些机器人设备并不能减少服务人员的工作强度及工作量。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种取物运送过程平稳快捷、能够自主将物品放置到指定位置的桌面上以及能够有效减少服务人员工作量的可自动取物置物的载运机器人。
为解决上述技术问题,本发明采用以下技术方案:
一种可自动取物置物的载运机器人,包括移动架、承载板和两个相间隔的推架,所述推架滑设于移动架的顶部,所述推架上设有能够升降的升降架,所述承载板支承在两个推架的升降架上,所述推架上设有用于驱动升降架升降的升降驱动机构,所述移动架上设有用于驱动两个推架滑移至伸于桌体上的滑移驱动机构。
作为上述技术方案的进一步改进:
所述升降架包括剪刀架和升降板,所述剪刀架的底部设于推架上,所述升降板设于剪刀架的顶部,所述承载板支承在升降板上,所述升降驱动机构与剪刀架连接,用于驱动剪刀架展收以使升降板升降。
所述升降驱动机构包括设于推架上的升降驱动丝杆和用于驱动升降驱动丝杆旋转的升降驱动电机,所述推架上滑设有滑块,所述升降驱动丝杆穿设于滑块中并与滑块螺纹连接,所述剪刀架底部的一端与推架铰接、另一端与滑块铰接,所述剪刀架顶部的一端与升降板铰接、另一端与升降板滑动连接。
所述推架上设有用于收容剪刀架的收容槽,所述滑块滑设于收容槽中。
所述滑移驱动机构包括设于移动架上的滑移驱动丝杆和用于驱动滑移驱动丝杆旋转的滑移驱动电机,两个所述推架之间设有连接杆,所述滑移驱动丝杆穿设于连接杆中并与连接杆螺纹连接。
所述移动架的顶部设有直线滑轨和容纳槽,所述直线滑轨设于容纳槽的底面上,所述推架滑设于直线滑轨上。
所述移动架包括支撑架、旋转架和用于驱动旋转架旋转调节的旋转驱动机构,所述支撑架的底部设有移动轮,所述旋转架设于支撑架的顶部,所述推架滑设于旋转架上,所述滑移驱动机构设于旋转架上。
所述旋转驱动机构包括齿轮组和旋转驱动电机,所述旋转驱动电机设于支撑架上、并通过齿轮组与旋转架连接。
所述支撑架上设有多层用于放置物品的放置台面。
所述可自动取物置物的载运机器人还包括控制模块,所述支撑架上设有用于驱动移动轮行走的行走电机,所述行走电机、旋转驱动机构、升降驱动机构和滑移驱动机构均与控制模块信号连接。
与现有技术相比,本发明的优点在于:
本发明的可自动取物置物的载运机器人,包括移动架、承载板和两个相间隔的推架,推架滑设于移动架的顶部,推架上设有能够升降的升降架,承载板支承在两个推架的升降架上,推架上设有用于驱动升降架升降的升降驱动机构,移动架上设有用于驱动两个推架滑移至伸于桌体上的滑移驱动机构。以本可自动取物置物的载运机器人用于传菜为例(当然本可自动取物置物的载运机器人也可以用于搬运其他物品),传菜过程:将菜品放于承载板上;可自动取物置物的载运机器人通过移动架移动至对应的桌体(餐桌)边,并与桌体对齐;升降驱动机构驱动升降架上升,使承载板高于桌体;滑移驱动机构驱动两个推架滑移至分别伸于桌体两侧;升降驱动机构驱动升降架下降,使承载板支承于桌体上,达到传菜的效果;滑移驱动机构驱动两个推架退回,待放置承载板为再次传菜使用。传菜过程反向运行可实现可自动取物置物的载运机器人的自主取菜功能,即可自动取物置物的载运机器人移动至桌体旁,未放置承载板的推架推出至桌体上的承载板下方,升降架上升,使承载板高于桌面,推架退回,升降架下降,达到去菜品的效果。本可自动取物置物的载运机器人取物运送过程平稳快捷、能够自主将物品放置到指定位置的桌面上以及能够有效减轻使用场景中服务人员的工作强度桌体。
附图说明
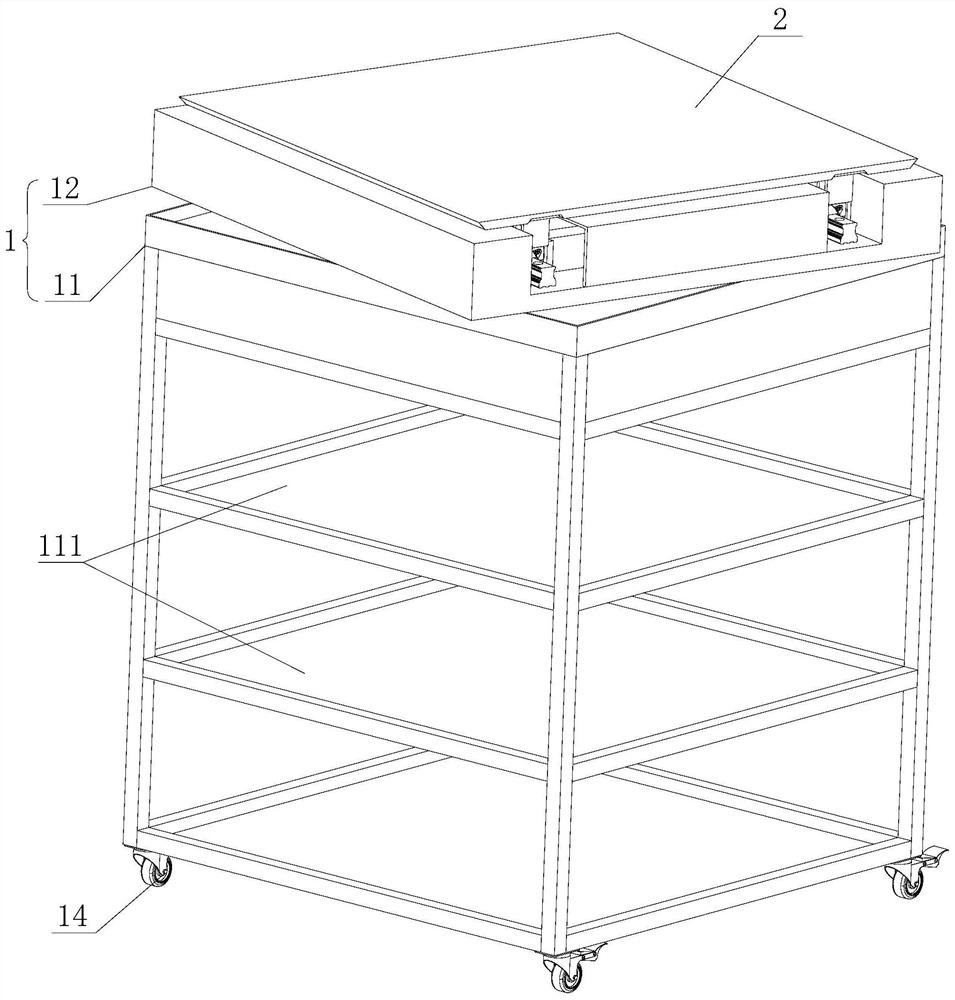
图1是本发明可自动取物置物的载运机器人的立体结构示意图。
图2是本发明可自动取物置物的载运机器人的立体结构示意图(承载板未示出)。
图3是图2中A处的放大图。
图4是本发明可自动取物置物的载运机器人的移动架的分解结构示意图(第一视角)。
图5是本发明可自动取物置物的载运机器人的移动架的分解结构示意图(第二视角)。
图6是本发明可自动取物置物的载运机器人在与桌体对齐时的结构示意图。
图7是本发明可自动取物置物的载运机器人在推架滑移时的结构示意图。
图8是本发明可自动取物置物的载运机器人在推架滑移时的结构示意图(承载板未示出)。
图9是本发明可自动取物置物的载运机器人完成传菜退回时的结构示意图。
图中各标号表示:
1、移动架;11、支撑架;111、放置台面;112、第一环形槽;113、滚珠;12、旋转架;121、第二环形槽;13、旋转驱动机构;131、齿轮组;132、旋转驱动电机;14、移动轮;2、承载板;3、推架;31、滑块;32、收容槽;33、连接杆;4、升降架;41、剪刀架;42、升降板;5、升降驱动机构;51、升降驱动丝杆;52、升降驱动电机;6、桌体;61、穿行槽;7、滑移驱动机构;71、滑移驱动丝杆;72、滑移驱动电机;8、直线滑轨;9、容纳槽。
具体实施方式
以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
图1至图9示出本发明可自动取物置物的载运机器人的一种实施例,本可自动取物置物的载运机器人包括移动架1、承载板2和两个相间隔的推架3,推架3滑设于移动架1的顶部,推架3上设有能够升降的升降架4,承载板2支承在两个推架3的升降架4上,推架3上设有用于驱动升降架4升降的升降驱动机构5,移动架1上设有用于驱动两个推架3滑移至伸于桌体6上的滑移驱动机构7。以本可自动取物置物的载运机器人用于传菜为例(当然本可自动取物置物的载运机器人也可以用于搬运其他物品),传菜过程:将菜品放于承载板2上;如图6所示,可自动取物置物的载运机器人通过移动架1移动至对应的桌体6(餐桌)边,并与桌体6对齐;如图6所示,升降驱动机构5驱动升降架4上升,使承载板2高于桌体6;如图7和图8所示,滑移驱动机构7驱动两个推架3滑移至分别伸于桌体6两侧;升降驱动机构5驱动升降架4下降,使承载板2支承于桌体6上,达到传菜的效果;如图9所示,滑移驱动机构7驱动两个推架3退回,待放置承载板2为再次传菜使用。同时,传菜过程反向运行可实现可自动取物置物的载运机器人的自主取菜功能,即可自动取物置物的载运机器人移动至桌体6旁,未放置承载板2的推架3推出至桌体6上的承载板2下方,升降架4上升,使承载板2高于桌面,推架3退回,升降架4下降,达到去菜品的效果。本可自动取物置物的载运机器人取物运送过程平稳快捷、能够自主将物品放置到指定位置的桌面上以及能够有效减轻使用场景中服务人员的工作强度桌体。
本实施例中,如图2和图3所示,升降架4包括剪刀架41和升降板42,剪刀架41的底部设于推架3上,升降板42设于剪刀架41的顶部,承载板2支承在升降板42上,升降驱动机构5与剪刀架41连接,用于驱动剪刀架41展收以使升降板42升降。具体地,每块升降板42通过两个间隔布置的升降架4支承在推架3上,利用剪刀架41的原理,实现升降板42的升降。
本实施例中,如图3所示,升降驱动机构5包括设于推架3上的升降驱动丝杆51和用于驱动升降驱动丝杆51旋转的升降驱动电机52,推架3上滑设有滑块31,升降驱动丝杆51穿设于滑块31中并与滑块31螺纹连接,剪刀架41底部的一端与推架3铰接、另一端与滑块31铰接,剪刀架41顶部的一端与升降板42铰接、另一端与升降板42滑动连接。具体地,升降驱动丝杆51和升降驱动电机52均安装在推架3上,随着推架3的移动而移动,升降驱动电机52(双向电机)驱动升降驱动丝杆51旋转正转或者反转,推动滑块31滑移,使剪刀架41向上展开或者使剪刀架41向下收缩,从而实现升降板42的升降运动。采用升降驱动丝杆51与滑块31的传动实现升降板42的上升,以至升降板42及升降板42上的承载板2高于桌体6。升降板42可设置成横截面呈梯形,承载板2的底面设置与升降板42适配的梯形槽,使得升降板42刚好位于梯形槽中,实现对承载板2在垂直于梯形槽侧壁的方向上限位。
本实施例中,如图3所示,推架3上设有用于收容剪刀架41的收容槽32,滑块31滑设于收容槽32中。具体地,收容槽32为上开口五侧封闭的槽,滑块31滑设于收容槽32中,升降驱动丝杆51穿设于收容槽32中,升降驱动电机52能够驱动升降驱动丝杆51旋转,使剪刀架41收缩至收容槽32中,升降板42盖于收容槽32顶部开口处,达到保护剪刀架41的效果。
本实施例中,如图2所示,滑移驱动机构7包括设于移动架1上的滑移驱动丝杆71和用于驱动滑移驱动丝杆71旋转的滑移驱动电机72,两个推架3之间设有连接杆33,滑移驱动丝杆71穿设于连接杆33中并与连接杆33螺纹连接。具体地,连接杆33固定在两个推架3之间,使得两个推架3形成一整结构,以同步滑移,滑移驱动电机72安装在移动架1上,用于驱动滑移驱动丝杆71旋转,滑移驱动丝杆71旋转能够带动连接杆33和两个推架3同步滑移,使得两个推架3向桌体6的一侧伸出,或者使伸出的推架3退回至移动架1上。
本实施例中,如图2和图3所示,移动架1的顶部设有直线滑轨8,推架3滑设于直线滑轨8上。直线滑轨8对推架3具有导向作用,使推架3沿着直线滑轨8平稳滑移,从而使传菜过程更加平稳。
本实施例中,如图2、图4、图5和图6所示,移动架1的顶部设有容纳槽9,直线滑轨8设于容纳槽9的底面上。具体地,容纳槽9贯穿于移动架1的相对两侧,容纳槽9的底面两侧均设有一根直线滑轨8,两个推架3分别滑设于两根直线滑轨8上,推架3在滑移驱动电机72的驱动作用下,能够伸出至容纳槽9外或者退回至容纳槽9中。容纳槽9的中部于滑移驱动机构7上方设有保护罩,保护罩用于保护滑移驱动机构7,也能用于支撑承载板2。
本实施例中,如图1、图2和图4至图9所示,移动架1包括支撑架11、旋转架12和用于驱动旋转架12旋转调节的旋转驱动机构13,支撑架11的底部设有移动轮14,旋转架12设于支撑架11的顶部,推架3滑设于旋转架12上,滑移驱动机构7设于旋转架12上。具体地,容纳槽9设于旋转架12的顶部,滑移驱动丝杆71和滑移驱动电机72均设于旋转架12上,具体设于容纳槽9的底面上。通过旋转驱动机构13能够旋转调节旋转架12,使旋转架12上的推架3能够对准于桌体6的两侧。桌体6顶面的两侧可开设穿行槽61,用于供推架3穿入,提高使用的安全性。通过旋转驱动机构13能够旋转调节旋转架12,使旋转架12上的推架3能够对准于桌体6的穿行槽61。支撑架11的顶面设有第一环形槽112,第一环形槽112内间隔设有多个滚珠113,旋转架12的底面上设有第二环形槽121,第二环形槽121支承在各滚珠113上,以此使旋转架12能够相对支撑架11旋转。
本实施例中,如图4所示,旋转驱动机构13包括齿轮组131和旋转驱动电机132,旋转驱动电机132设于支撑架11上、并通过齿轮组131与旋转架12连接。旋转驱动电机132通过齿轮组131使旋转架12进行旋转调节。
本实施例中,支撑架11上设有多层用于放置物品的放置台面111。放置台面111上可以用于放置菜盘,便于桌体6上的清理工作。
本实施例中,可自动取物置物的载运机器人还包括控制模块(附图中未示出),支撑架11上设有用于驱动移动轮14行走的行走电机(附图中未示出),行走电机、旋转驱动机构13的旋转驱动电机132、升降驱动机构5的升降驱动电机52和滑移驱动机构7均与控制模块信号连接。控制模块能够向行走电机、旋转驱动机构13的升降驱动机构5和/或滑移驱动机构7的滑移驱动电机72发出指令,使机器人移动至指定位置、使旋转架12旋转至指定角度、使升降板升降至指定高度和/或使推架3推出或者收回。本可自动取物置物的载运机器人能够实现自主取物-转运-放置过程,实现全程智能化操作以及能够有效减少服务人员工作量。
虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
- 一种可自动取物置物的载运机器人
- 一种自动喷洒机器人的置物结构