LIDAR系统中的光学开关
文献发布时间:2023-06-19 12:07:15
相关申请
本专利申请与于2018年10月12日提交的并且题为“Optical Sensor System”的美国临时专利申请序列号62/745,225,以及于2018年12月21日提交的题为“Optical SensorSystem”的美国临时专利申请序列号62/784,111相关,其每一个都整体地并入本文中。
技术领域
本发明涉及光学设备。特别地,本发明涉及LIDAR系统。
背景技术
LIDAR技术正被应用于各种各样的应用中。一种LIDAR技术利用生成出射光信号的LIDAR系统。LIDAR系统还从系统中输出LIDAR输出信号,该LIDAR输出信号包括来自出射光信号的光的一部分。LIDAR输出信号被物体反射,并且反射光的至少一部分作为LIDAR输入信号返回到LIDAR系统。LIDAR系统将LIDAR输入信号与参考信号进行组合,以便于生成复合信号。参考信号包括来自出射光信号的光的第二部分,该第二部分没有从LIDAR系统离开,并且没有被物体反射。LIDAR系统使用复合信号来生成物体的LIDAR数据(LIDAR输出信号的源与反射物体之间的距离和/或径向速度)。
通常合期望的是LIDAR输入信号通过与经由其发射LIDAR输出信号的小平面(facet)相同的小平面来接收(有时被叫做同轴配置)。因此,LIDAR输入信号和LIDAR输出信号穿过LIDAR系统所行进的路线的一部分可以是相同的(公共光程);然而,LIDAR系统可以将LIDAR输入信号的路线与LIDAR输出信号的路线分离,以便将LIDAR输入信号与参考信号进行组合。信号通常通过诸如耦合器和环行器之类的技术进行分离。
合期望的是使用诸如绝缘体上硅平台之类的平台在光学芯片上构建这些LIDAR系统。然而,环行器对于集成到这些光学芯片上来说是不实际的。附加地,由于光学耦合器使信号溢出,因此光学耦合器是LIDAR输入信号的功率损耗源。作为结果,需要一种能够将在相同光程上行进的LIDAR输入信号和LIDAR输出信号分离的LIDAR系统。
发明内容
LIDAR系统被配置成生成从LIDAR系统离开的出射光信号。LIDAR系统被配置成接收入射光信号,该入射光信号进入LIDAR系统,并且包括来自出射光信号的光。LIDAR系统还包括光学开关,该光学开关接收出射光信号和入射光信号,并且被配置成以不同模式进行操作。响应于光学开关处于不同模式,入射光信号和/或出射光信号沿穿过LIDAR系统的不同光程路由。
附图说明
图1是LIDAR系统的示意图。
图2A图示了在LIDAR系统的出口处的出射光信号和入射光信号的频率比对时间表的示例。
图2B图示了在LIDAR系统的出口处的出射光信号和入射光信号的频率比对时间表的另一个示例。
图2C图示了在LIDAR系统的出口处的出射光信号和入射光信号的频率比对时间表的另一个示例。
图2D图示了作为接收率的函数的分离阈值(ST)。
图3图示了被配置成生成包括多个通道的出射光信号的多个光源。
图4图示了包括多个激光源的光源。
图5图示了被配置成生成包括多个通道的光信号的结构的一个示例。
图6A图示了处理单元的示例。
图6B提供了适合与根据图6A所构造的处理单元一起使用的电子器件的示意图。
图6C提供了适合与根据图6A所构造的处理单元一起使用的电子器件的另一个示意图。
图7图示了包括光束转向能力的光学端口的示例。
图8图示了适合在平面光学设备中使用的光学开关的构造。
具体实施方式
LIDAR系统生成出射光信号,并且输出包括来自出射光信号的光的第一部分的LIDAR输出信号。LIDAR输出信号被物体反射,并且反射光的至少一部分作为LIDAR输入信号返回LIDAR系统。LIDAR系统将LIDAR输入信号与参考信号进行组合,以便于生成复合信号。参考信号包括来自出射光信号的光的一部分,该光的一部分没有从LIDAR系统离开并且没有被物体反射。LIDAR系统使用复合信号来生成物体的LIDAR数据(LIDAR输出信号的源与反射物体之间的距离和/或径向速度)。
LIDAR输入信号和LIDAR输出信号沿信号导向组件与波导的小平面之间的相同路线行进。信号导向组件是光学开关,其被操作成以便于将LIDAR输入信号的路径与LIDAR输出信号的路径分开。光学开关可以集成到诸如绝缘体上硅平台之类的光学芯片平台中。附加地,该开关不会显著降低LIDAR输入信号的功率。作为附加的和出乎意料的优点,光学开关可以大大减少从LIDAR系统离开并进入环境的激光能量的量。作为结果,光学开关提供了一种LIDAR系统,该系统可以为环境以及用户和旁观者的眼睛提供保护。
图1是LIDAR系统的示意图。该系统包括:光源10,诸如输出出射光信号的激光器。出射光信号包括一个或多个不同的通道,每个通道处于不同的波长。当输出光信号包括多个通道时,通道的波长可以周期性地间隔开,在于从一个通道到下一个通道的波长增加是恒定的或基本恒定的。用于生成具有单个通道的出射光信号的合适光源10包括半导体激光器、固态激光器、气体激光器和液体激光器。用于生成具有周期性地间隔开的波长的多个通道的合适光源10包括但不限于梳状激光器、多路复用成单个光波导的多个单波长激光器,以及源,诸如于2017年11月30日提交的、授权专利号为7542641、题为“Multi-ChannelOptical Device”并且整体地并入本文中的美国专利申请序列号11/998,846中所描述的源。
LIDAR系统还包括:实用波导12,其接收来自光源10的出射光信号。调制器14可选地沿着实用波导12定位。调制器14被配置成调制出射光信号的功率,并且相应地调制(一个或多个)LIDAR输出信号。电子器件可以操作调制器14。因此,电子器件可以调制出射光信号的功率,并且相应地调制(一个或多个)LIDAR输出信号。合适的调制器14包括但不限于PIN二极管载流子注入设备、马赫曾德尔调制器设备和电子-吸收调制器设备。当调制器14被构造在绝缘体上硅平台上时,在于1993年9月21日提交的题为“Integrated Silicon PINDiode Electro-Optical Waveguide”并且整体地并入本文中的美国专利申请序列号617,810中公开了一种合适的调制器。
放大器16可选地沿实用波导12定位。由于出射光信号的功率在多个通道当中分布,因此可能合期望的是放大器16在实用波导12上为通道中的每一个提供期望的功率电平。合适的放大器包括但不限于半导体光放大器(SOA)。
实用波导12将来自调制器14的出射光信号携带到信号导向组件18。信号导向组件18可以将出射光信号导向LIDAR分支20和/或数据分支22。LIDAR分支输出LIDAR输出信号,并且接收LIDAR输入信号。数据分支处理LDAR输入信号以生成LIDAR数据(LIDAR输出信号的源与反射物体之间的距离和/或径向速度)。
LIDAR分支包括:LIDAR信号波导24,其接收来自信号导向组件18的出射光信号中的至少一部分。LIDAR信号波导24将出射光信号中的至少一部分携带到光学端口26,光信号通过该光学端口26进入和/或离开LIDAR系统。在一些情况下,光学端口26是位于LIDAR芯片的边缘处的小平面。当出射光信号包括不同波长的多个不同通道时,光学端口26可以具有多路解调器功能,和/或可以包括多路解调器或由多路解调器组成,该多路解调器将出射光信号分成多个LIDAR输出信号,其均处于不同波长(通道),并且被导向视场中的不同样本区域。光学端口26输出可以被位于LIDAR系统外部的反射物体(未示出)反射的LIDAR输出信号。反射的LIDAR输出信号作为LIDAR输入信号返回到光学端口26。光学端口26将LIDAR输入信号进行组合,并且在LIDAR信号波导24上输出结果作为入射光信号。
在一些情况下,光学端口26包括光束转向功能。在这些情况下,光学端口26可以与能够操作光学端口26的电子器件(未示出)电通信,以便将LIDAR输出信号转向视野中的不同样本区域。光学端口26和/或电子器件可以被配置成使得不同的LIDAR输出信号被独立地转向或被同时转向。
尽管光学端口26被图示为单个组件,但是光学端口26可以包括多个光学组件和/或电组件。合适的光学端口包括但不限于光学相控阵(OPA)、透射衍射光栅、反射衍射光栅和衍射光学元件(DOE)。具有光束转向能力的合适的光学端口26包括但不限于在阵列波导上具有有源相位控制元件的光学相控阵(OPA)。
LIDAR信号波导24将入射光信号携带到信号导向组件18。由于出射光信号也在光学端口26与信号导向组件18之间在LIDAR信号波导24上行进,入射光信号和出射光信号在光学端口26与信号导向组件18之间行进一条公共光程。出射光信号沿公共光路远离信号导向组件18而行进,并且入射光信号沿公共光路朝向信号导向组件18而行进。信号导向组件18将入射光信号导向实用波导12和/或比较信号波导28。入射光信号中被导向比较信号波导28的部分用作比较入射光信号。
比较信号波导28将比较入射光信号携带到比较多路解调器30。当比较光信号包括多个通道时,比较多路分解器30将比较入射光信号划分成均具有不同波长的不同比较信号。比较多路解调器30在不同的比较波导32上输出比较信号。比较波导32均将比较信号之一携带到不同的处理组件34。
信号导向组件18被配置成使得当信号导向组件18将入射光信号中的至少一部分导向比较波导32时,信号导向组件18还将出射光信号中的至少一部分导向参考信号波导36。由参考信号波导36接收到的输出光信号的部分用作参考光信号。
参考信号波导36将参考光信号携带到参考多路解调器38。当参考光信号包括多个通道时,参考多路解调器38将参考光信号划分成不同的参考信号,其均具有不同的波长。参考多路解调器38在不同的参考波导40上输出参考信号。参考波导40均将参考信号之一携带到处理组件34中的不同一个。
比较波导32和参考波导40被配置成使得比较信号和对应的参考信号在相同的处理组件34处被接收。例如,比较波导32和参考波导40被配置成使得在相同的处理组件34处接收比较信号和相同波长的对应的参考信号。
如将在下面更详细地描述的,处理组件34均将比较信号与对应的参考信号进行组合以形成复合信号,该复合信号携带用于视场上的样本区域的LIDAR数据。因此,可以对复合信号进行处理,以便提取样本区域的LIDAR数据。信号导向组件18可以是诸如交叉开关之类的光学开关。合适的交叉开关可以在切换模式或通过模式下进行操作。在通过模式下,出射光信号被导向LIDAR信号波导24,并且入射光信号将被导向实用波导12。在切换模式下,出射光信号被导向参考信号波导36,并且入射光信号被导向比较信号波导28。因此,入射光信号或入射光信号的一部分可以用作比较光信号,并且出射光信号或出射光信号的一部分可以用作参考光信号。
上述不同的开关操作模式被配置成使得当光学开关处于通过模式(第一模式)时,出射光信号从LIDAR系统离开,但是当光学开关处于切换模式(第二模式)时,出射光信号不从LIDAR系统离开。当光学开关处于通过模式时,入射光信号和出射光信号两者都沿公共光程行进。当光学开关处于切换模式时,入射光信号沿公共光程行进,但是当光学开关处于通过模式时,出射光信号不沿公共光程行进。当光学开关处于通过模式时,入射光信号沿包括比较信号波导28的全部或一部分的第一光程远离光学开关而行进,并且当光学开关处于切换模式时,出射光信号沿包括参考信号波导36的全部或一部分的第二光程远离光学开关而行进。第一光程、第二光程和公共光程彼此分离。当光学开关处于切换模式时,来自出射光信号的光与来自入射光信号的光混合,以便生成复合光信号。当光学开关处于第一模式时,不生成复合光信号。
诸如交叉开关之类的光学开关可以由电子器件控制。例如,电子器件可以控制操作开关,使得开关处于切换模式或通过模式。当要从LIDAR系统发射LIDAR输出信号时,电子器件操作开关,使得开关处于通过模式。当要由LIDAR系统接收LIDAR输入信号时,电子器件操作开关,使得开关处于切换模式。与使用光学耦合器作为信号导向组件18相关联的相比,使用开关可以提供更低的光学损耗水平。
在以上对信号导向组件18的操作的描述中,比较光信号和参考光信号同时被导向数据分支。作为结果,处理组件34可以均将比较信号与对应的参考信号进行组合。
在一些情况下,光学放大器42可选地沿LIDAR信号波导24定位,并且被配置成提供出射光信号和/或入射光信号的放大。因此,可以减少信号导向组件18处的光学损耗的影响。
在LIDAR系统的操作期间,LIDAR数据的生成被划分成一系列循环,其中每个循环都生成LIDAR数据。在一些情况下,循环中的每一个对应于视场中的不同样本区域。因此,不同的循环可以为视场中的不同区域生成LIDAR数据。
可以实行循环,使得可以将每个循环的时间划分成不同的时间段。电子器件可以将线性调频(chirp)添加到出射光信号的频率,并且相应地添加到(一个或多个)LIDAR输出信号。线性调频在循环中的相邻时段期间可能是不同的。例如,电子器件可以在第一时段期间增加出射光信号的频率,并且在第二时段期间减小出射光信号的频率。
下面的图2A至图2D图示了使用所公开的光学开关来操作LIDAR系统的结果。为了简化图示,图2A至图2D指向出射光信号中的单个通道,或者将LIDAR系统视为生成具有单个通道的出射光信号。
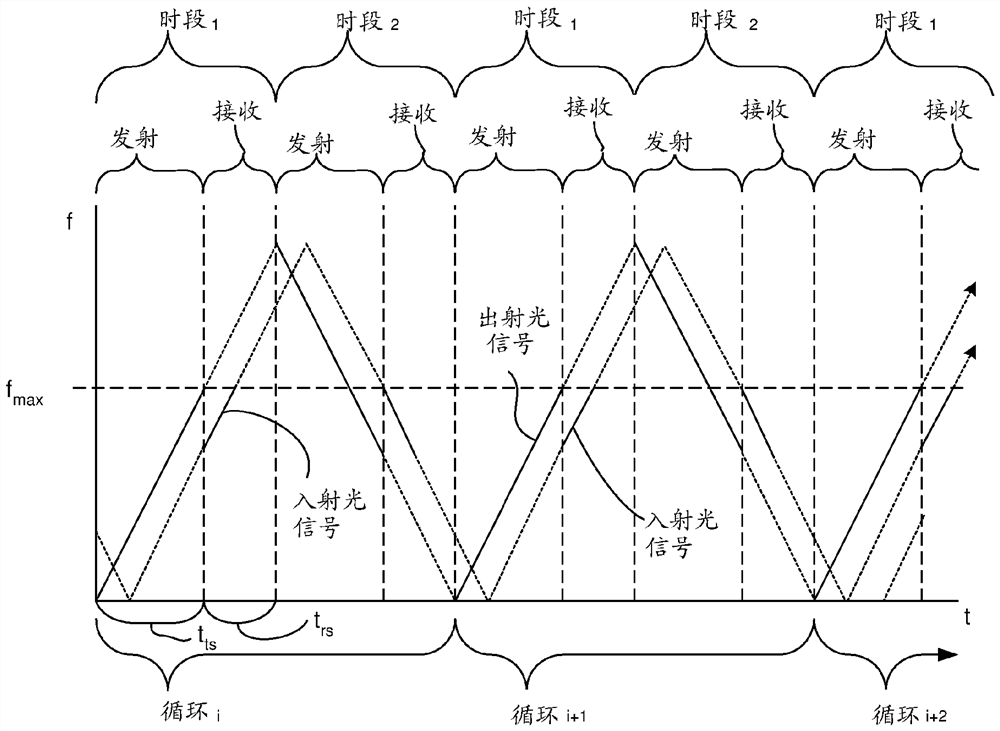
图2A图示了在小平面处的出射光信号和在小平面处的入射光信号的频率的可能的频率比对时间表的示例。示出了几个不同循环的时间表,这些循环被标记为循环
每个循环包括被标记为“时段
每个时段包括多个时间段。电子器件可以在不同的时间段期间在不同的模式下操作信号导向组件18。例如,在图2A中,每个时段包括发射段和接收段。在发射段期间,电子器件可以在通过模式下操作诸如光学开关之类的信号导向组件18,在该模式下,出射光信号被导向LIDAR信号波导24,如图2A中被标记为“出射光信号”的实线所图示的。作为结果,在发射段期间从LIDAR系统输出一个或多个LIDAR输出信号。
在接收段期间,电子器件可以在切换模式下操作诸如光学开关之类的信号导向组件18,在该模式下,出射光信号被导向参考信号波导36,所以出射光信号或出射光信号的一部分可以用作参考光信号。作为结果,在接收段期间,在小平面处没有接收到出射光信号。为了说明此结果,LIDAR输出信号在接收段中的一部分被示出为图2A中的虚线。因此,在接收段期间,“出射光信号”继续由LIDAR系统生成,但是不作为一个或多个LIDAR输出信号输出。由于在接收段期间未从LIDAR系统输出一个或多个LIDAR输出信号,因此减少了引入大气的激光能量的量,并且降低了源于LIDAR系统的眼睛伤害的可能性。附加地,在接收段期间,入射光信号被导向比较信号波导28,从而允许入射光信号或入射光信号的一部分用作比较光信号。
在随后的发射段期间,先前发射的LIDAR输出信号可以继续作为LIDAR输入信号返回LIDAR系统。结果得到的入射光信号仍然可以在LIDAR信号波导24上接收,然而,由于电子器件在发射段期间在通过模式下操作信号导向组件18,所以接收到的入射光信号不会被传递到数据分支22。例如,在图1的LIDAR系统中,入射光信号被导向实用波导12,在实用波导12中,它通常没有足够的功率来影响(一个或多个)光源的操作。在降低实用波导12上的入射光信号的强度是合期望的情况下,则有可能通过一种或多种机制来降低出射光信号的功率,所述机制是从由以下各项组成的组中选择的:降低由放大器16提供的放大、调谐来自光源的输出并且操作实用波导12上的光学衰减器(未示出)。由于在发射段期间,入射光信号被导向实用波导12,因此电子器件不会根据在发射段期间接收到的入射光信号来生成LIDAR数据。图2A的在发射段期间的虚线所示出的入射光信号的部分说明了该结果。
在LIDAR系统中,往返信号时间τ表示LIDAR输出信号行进到反射物体并且返回到LIDAR系统的时间。作为结果,往返信号时间(τ)可以被表示为τ=2D/c,其中D表示反射物体与LIDAR输出信号从LIDAR系统离开的位置之间的位移距离。LIDAR系统通常与最大距离(D
图2B图示了经修改的图2A的频率比对时间表,以示出当反射物体定位得比在图2A中更靠近LIDAR系统时的结果。特别地,图2B表示了如下情形,其中τ=接收段的持续时间(T
电子装置使用在接收段期间从入射光信号生成的数据来生成LIDAR数据。LIDAR数据的可靠性增加了入射光信号可用于电子器件的更长时间。如在图2A和图2B中明显的是,入射光信号可用于电子器件,以用于在接收段的整个持续时间期间生成LIDAR数据。
随着LIDAR系统与物体之间的距离变得足够近,以至于往返信号时间(τ)变得小于接收段的持续时间(T
在图2C中的发射段期间,LIDAR系统与反射物体的紧密接近导致入射光信号迅速返回到LIDAR系统。附加地,从LIDAR系统离开的出射光信号的频率不会超过图2C中被标记为f
图2D图示了作为接收段持续时间的函数的分离阈值(ST),其中,接收段持续时间被示为时段的百分比(100 * t
如从图2D中明显的是,当接收段超过时段的50%时,入射光信号在接收段的100%内不可用于电子器件。因此,接收段的持续时间(t
电子器件可以调谐发射段持续时间(t
上面的讨论公开了位移距离(D和D
如以上所指出的,往返时间(τ)是位移距离的函数(τ=2D/c)。因此,知道往返时间的电子器件也有效地知道了位移距离(D)。电子器件可以使用各种各样不同的机制来标识将在调谐发射段持续时间(t
尽管上述LIDAR系统被图示为具有单个光源10,但LIDAR系统可以具有多个光源10,如图3中图示的。光源10包括M个光源10,每个光源生成N个通道。通道均在通道波导80上被接收。通道波导将通道携带到通道多路复用器82,该通道多路复用器82将通道进行组合,以便形成在实用波导12上接收的出射光信号。
在图3中,通道中的每一个都被标记为λ
光源10(M)的数量的合适值包括但不限于大于或等于2、4或8和/或小于16、32或64的值。光源10(N)所提供的通道数量的合适值包括但不限于大于或等于2、4或8和/或小于16、32或64的值。从一个通道到下一个通道的波长增加(△λ)的合适值包括但不限于大于或等于0.2 nm、0.4 nm或0.6 nm和/或小于0.8 nm、1.0 nm或1.5 nm的值。具有最短波长的通道的波长的合适值包括但不限于大于或等于1.3 μm、1.4 μm或1.5 μm和/或小于1.6 μm、1.7μm或1.8 μm的值。在一个示例中,LIDAR系统包括M,其大于或等于2、4或8和/或小于16、32或64;N,其大于或等于2、4或8和/或小于16、32或64;以及△λ,其大于或等于0.2 nm、0.4nm或0.6 nm和/或小于0.8 nm、1 nm或1.5 nm。
在一些情况下,光源10被配置成使得光源10的至少一部分均生成具有相邻波长的两个或更多个通道。例如,光源10可以被配置成使得λ
如以上所指出的,光源10中的一个或多个可以是梳状激光器。然而,光源10的其他构造是可能的。例如,图4图示了包括多个激光源84的光源10的示例。图4中图示的光源10包括多个激光源84,每个激光源在源波导86上输出通道之一。源波导86将通道携带到激光多路复用器88,该激光多路复用器88将通道进行组合,以便形成在通道波导或实用波导12上接收到的光信号。电子器件可以操作激光源84,因此激光源84同时输出通道中的每一个。用于与根据图4构造的光源10一起使用的合适的激光器包括但不限于外腔激光器、分布式反馈激光器(DFB)和法布里-珀罗(FP)激光器。外腔激光器在该实施例中是有利的,因为它们的线宽通常较窄,这可以减小检测到的信号中的噪声。
图5图示了可能的光源10构造的另一个示例。光源10包括诸如半导体激光器的增益元件之类的增益元件90。增益波导92与增益元件光学对准,以便接收来自增益元件的光信号。在一些情况下,增益波导不包括增益元件中所包括的增益介质。例如,增益波导可以是绝缘体上硅芯片上的脊形波导。沿着增益波导定位多个部分返回设备94,使得部分返回设备与光信号相互作用。
在操作期间,电子器件操作增益元件,使得增益介质输出光信号。部分返回设备94均使光信号的一部分通过。实用波导12从部分返回设备接收的光信号的部分用作出射光信号。部分返回设备还使光信号的一部分返回到增益元件,使得光信号的返回部分行进通过增益元件。增益元件可以包括全反射层或部分反射层,其从增益元件接收光信号的返回部分,并且将光信号的返回部分反射回到增益元件,从而允许光信号的返回部分进行放大和发出激光。因此,光源10可以是外腔激光器。
部分返回设备可以被配置成使得每个部分返回设备返回不同波长的光。例如,部分返回设备可以被配置成使得要由光源10输出的通道中的每一个的波长被部分返回设备中的至少一个返回。作为结果,期望的通道中的每一个都将发出激光并且出现在出射光信号中。合适的部分返回设备包括但不限于布拉格光栅。
图6A至图6B图示了用于在以上LIDAR系统中使用的合适的处理组件的示例。第一分离器102将在参考波导40、52或58上携带的参考信号划分到第一参考波导110和第二参考波导108上。第一参考波导110将参考信号的第一部分携带到光-组合组件111。第二参考波导108将参考信号的第二部分携带到第二光-组合组件112。
第二分离器100将比较波导30、72或74上携带的比较信号划分到第一比较波导104和第二比较波导106上。第一比较波导104将比较信号的第一部分携带到光-组合组件111。第二比较波导108将比较信号的第二部分携带到第二光-组合组件112。
第二光-组合组件112将比较信号的第二部分和参考信号的第二部分组合成第二复合信号。由于比较信号的第二部分与参考信号的第二部分之间的频率差异,第二复合信号在比较信号的第二部分与参考信号的第二部分之间跳动。光-组合组件112还将结果得到的第二复合信号拆分到第一辅助检测器波导114和第二辅助检测器波导116上。
第一辅助检测器波导114将第二复合信号的第一部分携带到第一辅助光传感器118,该第一辅助光传感器118将第二复合信号的第一部分转换成第一辅助电信号。第二辅助检测器波导116将第二复合信号的第二部分携带到第二辅助光传感器120,该第二辅助光传感器120将第二复合信号的第二部分转换成第二辅助电信号。合适的光传感器的示例包括锗光电二极管(PD)和雪崩光电二极管(APD)。
第一光-组合组件111将比较信号的第一部分和参考信号的第一部分组合成第一复合信号。由于比较信号的第一部分与参考信号的第一部分之间的频率差异,第一复合信号在比较信号的第一部分与参考信号的第一部分之间跳动。光-组合组件111还将第一复合信号拆分到第一检测器波导121和第二检测器波导122上。
第一检测器波导121将第一复合信号的第一部分携带到第一光传感器123,该第一光传感器123将第二复合信号的第一部分转换成第一电信号。第二检测器波导122将第二复合信号的第二部分携带到第二辅助光传感器124,该第二辅助光传感器124将第二复合信号的第二部分转换成第二电信号。合适的光传感器的示例包括锗光电二极管(PD)和雪崩光电二极管(APD)。
第一参考波导110和第二参考波导108被构造成在参考信号的第一部分与参考信号的第二部分之间提供相移。例如,第一参考波导110和第二参考波导108可以被构造成以便在参考信号的第一部分与参考信号的第二部分之间提供90度的相移。作为示例,一个参考信号部分可以是同相分量,并且另一个可以是正交分量。因此,参考信号部分之一可以是正弦函数,并且另一参考信号部分可以是余弦函数。在一个示例中,第一参考波导110和第二参考波导108被构造成使得第一参考信号部分是余弦函数并且第二参考信号部分是正弦函数。因此,第二复合信号中的参考信号的部分相对于第一复合信号中的参考信号的部分相移,然而,第一复合信号中的比较信号的部分相对于第二复合信号中的比较信号的部分没有相移。
第一光传感器123和第二光传感器124可以被连接为平衡检测器,并且第一辅助光传感器118和第二辅助光传感器120也可以被连接为平衡检测器。例如,图6B提供了电子器件、第一光传感器123、第二光传感器124、第一辅助光传感器118和第二辅助光传感器120之间的关系的示意图。光电二极管的符号被用来表示第一光传感器123、第二光传感器124、第一辅助光传感器118和第二辅助光传感器120,但是这些传感器中的一个或多个可以具有其他构造。在一些情况下,图6B的示意图中图示的所有组件都包括在LIDAR系统中。在一些情况下,图6B的示意图中所图示的组件分布在LIDAR系统与位于LIDAR系统之外的电子器件之间。
电子器件将第一光传感器123和第二光传感器124连接为第一平衡检测器125,并且将第一辅助光传感器118和第二辅助光传感器120连接为第二平衡检测器126。特别地,第一光传感器123和第二光传感器124串联连接。附加地,第一辅助光传感器118和第二辅助光传感器120串联连接。第一平衡检测器中的串行连接与第一数据线128连通,该第一数据线128携带来自第一平衡检测器的输出作为第一数据信号。第二平衡检测器中的串行连接与第二数据线132连通,该第二数据线132携带来自第一平衡检测器的输出作为第二数据信号。第一数据信号和第二数据信号由于比较信号与参考信号之间的跳动而跳动,即,在第一复合信号与第二复合信号中的跳动。
第一数据线128将第一数据信号携带到第一开关134。该第一开关可以处于第一配置,其中第一数据信号被携带到距离分支136;或者处于第二配置,其中第一数据信号被携带到速度分支138。在图6B中,示出了处于第一配置的第一开关134。第二数据线132将第二数据信号携带到第二开关140。第二开关可以处于第一配置,其中第二数据信号被携带到距离分支136;或者处于第二配置,其中第二数据信号被携带到速度分支138。在图6B中,示出了处于第一配置的第二开关140。用作第一开关和/或第二开关的合适的开关包括但不限于机电开关和固态MOSFET或PIN二极管开关。
电子器件操作第一开关和第二开关,使得它们在第一时段和第二时段期间处于相同的配置。例如,电子器件可以操作第一开关和第二开关,使得第一开关和第二开关在第一时段期间两者都处于第一配置,并且在第二时段期间两者都处于第二配置。在该示例中,第一数据信号和第二数据信号在第一时段期间被携带到距离分支136,并且在第二时段期间被携带到速度分支138。
在LIDAR系统的操作期间,LIDAR数据的生成被划分为一系列循环,其中每个循环都生成LIDAR数据。在一些情况下,循环中的每一个对应于视场中的不同样本区域。因此,不同的循环可以为视场中的不同区域生成LIDAR数据。
可以实行循环,使得每个循环的时间可以被划分成不同的时间段,包括距离时间段(第一时段)和速度时间段(第二时段)。可以在距离时段中确定反射物体与LIDAR芯片之间的距离,并且可以在速度时段中确定反射物体与LIDAR芯片之间的径向速度。
电子器件被配置成使用第一数据信号和第二数据信号来确定或至少近似LIDAR系统与反射物体之间的距离。例如,在第一时段期间,电子器件可以操作调制器14,以便将线性调频添加到出射光信号的幅值上,并且相应地添加到LIDAR输出信号的幅值上。向幅值添加线性调频可以包括调制出射光信号的幅值,使得出射光信号的幅值是正弦函数。在一个示例中,调制出射光信号的幅值,使得出射光信号的幅值是包括正弦曲线的函数的平方根、和/或是正弦曲线的平方根。例如,可以对出射光信号进行调制,以便产生数学上由等式1表示的已调制出射光信号和LIDAR输出信号:(M+N * cos(C * t+D * t
距离分支包括第一距离分支线142。在第一时段期间,第一距离分支线142将第一数据信号携带到第一乘法器144。在图6B中,第一乘法器144被配置成对第一数据信号的幅值求平方,并且输出第一相乘的数据信号。距离分支包括第二距离分支线146。在第一时段期间,第二距离分支线146将第二数据信号携带到第二乘法器148。在图6B中,第二乘法器148被配置成对第二数据信号的幅值求平方,并且输出第二相乘的数据信号。合适的第一乘法器和/或第二乘法器包括但不限于RF混频器,诸如吉尔伯特单元混频器。
距离分支包括:加法器150,其将第一相乘的数据信号和第二相乘的数据信号相加。该加法器输出相加的数据信号。合适的加法器包括但不限于包括电阻或混合组合器的RF组合器。距离分支包括:低通滤波器152,其接收相加的数据信号,并且输出跳动的数据信号。选择低通滤波器以去除对相加的数据信号的较高频率贡献,这些贡献是参考信号和返回信号的混合伪像。可以选择低通滤波器,使其带宽大于或等于:f
距离分支包括:模数转换器(ADC)154,其从滤波器接收跳动的数据信号。模数转换器(ADC)154将跳动的数据信号从模拟形式转换成数字形式,并且将结果作为数字LIDAR数据信号输出。如上面讨论的,跳动的数据信号的转换包括以采样率对跳动的数据信号进行采样。将线性调频添加到LIDAR输出信号的幅值,从复合信号的跳动和结果得到的电信号中大大减小或去除径向速度的影响。例如,LIDAR输出信号相对于LIDAR输入信号的频率偏移(“频率偏移”△f)可以被写做△f=△f
距离分支包括:变换模块156,其从模数转换器(ADC)154接收数字LIDAR数据信号。变换模块156被配置成对数字LIDAR数据信号实行实数变换,以便从时域转换到频域。该转换为LIDAR输入信号相对于LIDAR输入信号的偏移的频率偏移提供了明确的解决方案,该偏移是由反射物体与LIDAR系统之间的距离引起的。合适的实数变换是诸如快速傅立叶变换(FFT)之类的傅立叶变换。将该变换分类为实数变换,将该变换与复数变换(诸如复数傅立叶变换)区分开。变换模块可以使用固件、硬件或软件或其组合来执行属性功能。
由于变换模块所提供的频率没有来自归因于相对移动的频率偏移的输入或没有来自频率偏移的实质输入,因此所确定的频率偏移可以被用来近似反射物体与LIDAR系统之间的距离。例如,电子器件可以使用等式3近似反射物体与LIDAR系统之间的距离(R
速度分支可以被配置成使用第一数据信号和第二数据信号来确定或至少近似LIDAR系统和反射物体的径向速度。具有作为在图1至图2的上下文中公开的时间的函数的频率的LIDAR输出信号可以被LIDAR输出信号代替,其中LIDAR输出信号的频率不是时间的函数。例如,LIDAR输出信号可以是连续波(CW)。例如,在第二时段期间,已调制出射光信号以及因此LIDAR输出信号可以是未线性调频的连续波(CW)。作为示例,已调制出射光信号以及因此LIDAR输出信号可以用等式2表示:G * cos(H * t),其中G和H是常数,并且t表示时间。在一些情况下,G表示出射光信号的功率的平方根,和/或H表示来自等式1的常数F。在其中光源的输出具有已调制出射光信号所期望的波形的情况下,电子器件不需要操作调制器14以便修改出射光信号。在这些情况下,(一个或多个)光源的输出可以用作已调制出射光信号,并且相应地用作LIDAR输出信号。在一些情况下,电子器件操作调制器14,以便生成具有期望形式的已调制出射光信号。
由于LIDAR输出信号的频率在第二时段中是恒定的,因此改变反射物体与LIDAR系统之间的距离不会导致LIDAR输入信号的频率发生变化。作为结果,分离距离对LIDAR输入信号的频率相对于LIDAR输出信号的频率的偏移没有贡献。因此,分离距离的影响已经被去除或基本上从LIDAR输入信号的频率相对于LIDAR输出信号的频率的偏移中去除。
速度分支包括第一速度分支线160和第二速度分支线160。在第二时段期间,第一速度分支线160将第一数据信号携带到模数转换器(ADC)164,该模数转换器将第一数据信号从模拟形式转换成数字形式,并且输出第一数字数据信号。如上面讨论的,通过以采样率对第一数据信号进行采样来完成第一数据信号的转换。连续波作为LIDAR输出信号的使用从复合信号和结果得到的电信号的跳动中,基本上去除了反射物体与LIDAR系统之间的距离的影响。因此,降低了拍频并且降低了所需的采样率。
第二速度分支线162将第二数据信号携带到模数转换器(ADC)166,该模数转换器将第二数据信号从模拟形式转换成数字形式,并且输出第二数字数据信号。如上面讨论的,第二数据信号的转换包括以采样率对第二数据信号进行采样。连续波作为LIDAR输出信号的使用从第二复合信号和结果得到的电信号的跳动中大大减少或去除反射物体与LIDAR系统之间的距离的影响。因此,降低了拍频并且降低了所需的采样率。
模数转换器(ADC)164的采样率可以与模数转换器(ADC)166的采样率相同或不同。
速度分支包括:变换模块168,其从模数转换器(ADC)164接收第一数字数据信号,并且从模数转换器(ADC)166接收第二数字数据信号。由于第一数据信号是同相分量,并且第二数据信号是正交分量,因此第一数据信号和第二数据信号一起充当复数速度数据信号,其中第一数据信号是实分量,并且第二数据信号是虚分量。作为结果,第一数字数据信号可以是数字速度数据信号的实分量,并且第二数据信号可以是数字速度数据信号的虚分量。变换模块168可以被配置成对数字速度数据信号实行复数变换,以便从时域转换到频域。这种转换为LIDAR输入信号相对于LIDAR输入信号的频率偏移提供了明确的解决方案,该偏移是由反射物体与LIDAR系统之间的径向速度引起的。合适的复数变换是傅立叶变换,诸如复数快速傅立叶变换(FFT)。变换模块可以使用固件、硬件或软件或其组合来执行属性功能。
因为变换模块168所提供的频率偏移不从归因于反射物体与LIDAR系统之间的分离距离的频率偏移输入、并且由于速度数据信号的复数性质,因此变换模块168的输出可以被用来近似反射物体与LIDAR系统之间的径向速度。例如,电子器件可以使用等式4近似反射物体与LIDAR系统之间的径向速度(v):v=c * f
可以将附加组件添加到图6B的示意图。例如,当LIDAR系统生成多个LIDAR输出信号、或与其他生成LIDAR输出信号的LIDAR系统一起使用时(即,借助于频分复用或波分复用FDM/WMD),LIDAR系统可以包括一个或多个滤波器,用于从跳动的数据信号和/或速度数据信号的实分量和/或虚分量中去除干扰信号。因此,除了图示的组件之外,LIDAR系统还可以包括一个或多个滤波器。合适的滤波器包括但不限于低通滤波器。在光学设计的情况下,如果干扰分量的频率落在(一个或多个)平衡检测器的带宽之外,则附加的滤波可能不是必要的,因为它可以由(一个或多个)平衡检测器有效地提供。
可以选择在第一时段和第二时段期间使用的采样率以具有大于或等于从由第一时段的最小采样率和第二时段的最小采样率组成的组中选择的两个值中的较大者的值。例如,在第一时段期间,可以通过
图6C提供了适用于利用根据图7A所构造的处理单元提取LIDAR数据的电子器件的示意图的另一个示例。电子器件将第一光传感器123和第二光传感器124连接为第一平衡检测器125,并且将第一辅助光传感器118和第二辅助光传感器120连接为第二平衡检测器126。特别地,第一光传感器123和第二光传感器124串联连接。附加地,第一辅助光传感器118和第二辅助光传感器120串联连接。第一平衡检测器中的串行连接与第一数据线128连通,该第一数据线128携带来自第一平衡检测器的输出作为第一数据信号。第二平衡检测器中的串行连接与第二数据线132连通,该第二数据线132携带来自第二平衡检测器的输出作为第二数据信号。第一数据信号是第一复合信号的电表示,并且第二数据信号是第二复合信号的电表示。因此,第一数据信号包括来自第一波形和第二波形的贡献,并且第二数据信号是第一波形和第二波形的复合。第一数据信号中的第一波形的一部分相对于第一数据信号中的第一波形的一部分相移,但是第一数据信号中的第二波形的一部分相对于第一数据信号中的第二波形的一部分同相。例如,第二数据信号包括相对于第一数据信号中包括的参考信号的不同部分相移的参考信号的一部分。附加地,第二数据信号包括与第一数据信号中包括的比较信号的不同部分同相的比较信号的一部分。第一数据信号和第二数据信号由于比较信号与参考信号之间的跳动而跳动,即,在第一复合信号中和第二复合信号中的跳动。
电子器件62包括:变换机构138,其被配置成对第一数据信号和第二数据信号实行数学变换。例如,数学变换可以是以第一数据信号和第二数据信号作为输入的复数傅立叶变换。由于第一数据信号是同相分量,并且第二数据信号是正交分量,所以第一数据信号和第二数据信号一起充当复数数据信号,其中第一数据信号是输入的实分量,并且第二数据信号是输入的虚分量。
变换机构138包括:第一模数转换器(ADC)164,其从第一数据线128接收第一数据信号。第一模数转换器(ADC)164将第一数据信号从模拟形式转换成数字形式,并且输出第一数字数据信号。变换机构138包括:第二模数转换器(ADC)166,其从第二数据线132接收第二数据信号。第二模数转换器(ADC)166将第二数据信号从模拟形式转换成数字形式,并且输出第二数字数据信号。第一数字数据信号是第一数据信号的数字表示,并且第二数字数据信号是第二数据信号的数字表示。因此,第一数字数据信号和第二数字数据信号一起充当复数信号,其中第一数字数据信号充当复数信号的实分量,并且第二数字数据信号充当复数数据信号的虚分量。
变换机构138包括:接收复数数据信号的变换组件168。例如,变换组件168从第一模数转换器(ADC)164接收第一数字数据信号作为输入,并且还从第一模数转换器(ADC)166接收第二数字数据信号作为输入。变换组件168可以被配置成对复数信号实行数学变换,以便从时域转换到频域。数学变换可以是诸如复数快速傅立叶变换(FFT)之类的复数变换。诸如复数快速傅立叶变换(FFT)之类的复数变换为LIDAR输入信号相对于LIDAR输出信号的频率偏移提供了明确的解决方案,该偏移是由反射物体与LIDAR芯片之间的径向速度引起的。变换组件168可以使用固件、硬件或软件或其组合来执行属性功能。
复数傅立叶变换将输入从时域转换到频域,复数傅立叶变换为位于样本区域中的每个物体输出单个频率峰值。与该峰值相关联的频率被电子器件使用,因为LIDAR输入信号相对于LIDAR输出信号的频率偏移是由反射物体与LIDAR芯片之间的径向速度、和/或反射物体与LIDAR芯片之间的距离引起的。解决LIDAR输入信号的频率的现有方法利用实数傅立叶变换而不是上面所公开的复数傅立叶变换技术。这些现有方法为样本区域中的每个物体输出多个频率峰值。因此,现有方法输出都与样本区域中的每个物体相关联的多个不同频率,因为如果从样本区域中去除了该物体,则将不存在相关联的频率中的每一个。如以上所指出的,当使用LIDAR应用程序时,标识正确的峰值可能会变得困难。由于上述用于解决频率的技术生成了针对该频率的单个解,因此解决了关于频率解的歧义。
电子器件可以使用来自变换的每个频率峰值输出来生成LIDAR数据。例如,电子器件可以操作光源,使得LIDAR输出信号交替具有增加频率的时段和具有减少频率的时段,如图2C所示。以下等式在数据时段期间适用,其中电子器件在所述数据时段期间增加LIDAR输出的频率,诸如在第一时段期间与LIDAR输出信号2C一起发生:
如上面讨论的,LIDAR系统可以输出多于两个LIDAR输出信号,其均携带不同的通道。例如,LIDAR系统可以输出多个LIDAR输出信号,其具有根据图2C的频率比对时间的波形。可以将LIDAR输出信号同时导向视场中的相同样本区域,或者可以将LIDAR输出信号的不同部分导向视场中的不同样本区域。附加地,可以跨样本区域顺序扫描LIDAR输出信号,使得每个样本区域被LIDAR输出信号中的至少一个照射。
上面对LIDAR系统操作的描述假设在实用波导12上存在调制器;然而,在一些情况下,调制器是可选的。在这些情况下,电子器件可以操作(一个或多个)光源10,以便根据期望调谐LIDAR输出信号的频率。由于光源中的一个或多个可以输出多个通道,因此调谐一个光源的频率可以同时调谐多个通道的频率,并且因此调谐多个LIDAR输出信号。例如,调谐梳状激光器的频率同时调谐从该梳状激光器输出的通道的频率,并且因此调谐携带从该梳状激光器输出的通道的LIDAR输出信号。电子器件可以通过调谐被驱动通过梳状激光器的电流来调谐光源(诸如梳状激光器)的频率。在一些情况下,电子器件可以按10 GHz、100GHz和1 THz来调谐光源(诸如梳状激光器)的频率。
上面对LIDAR系统操作的描述假设在实用波导12上存在调制器;然而,调制器是可选的。在这些情况下,电子器件可以操作(一个或多个)光源10,以便在第一时段期间增加出射光信号的频率,并且在第二时段期间,电子器件可以降低出射光信号的频率,如图2C所示。从结果得到的复合信号中提取LIDAR数据的方法的其他示例在218年5月15日提交的题为“Optical Sensor Chip”并且整体地并入本文中的美国专利申请序列号62/671,913中被公开。
图7图示了包括解复用功能和光束转向能力的合适的光学端口26的示例。光学端口26包括:分离器184,其接收来自LIDAR信号波导24的出射光信号。分离器将出射光信号划分成多个输出信号,其均在转向波导186上被携带。转向波导中的每一个都在小平面188处终止。布置小平面,使得通过小平面离开芯片的输出信号进行组合以形成LIDAR输出信号。
分离器和转向波导可以被构造成使得在相邻的转向波导的小平面处的输出信号之间不存在相位差。例如,分离器可以被构造成使得输出信号中的每一个在从分离器离开时是同相的,并且转向波导均可以具有相同的长度。替代地,分离器和转向波导可以被构造成使得在相邻的转向波导的小平面处的输出信号之间存在线性增加的相位差。例如,转向波导可以被构造成使得转向波导编号j的相位为f
相位调谐器190可以沿转向波导的至少一部分定位。尽管示出了相位调谐器沿第一和最后一个转向波导定位,但是这些相位调谐器是可选的。例如,芯片不需要在转向波导j=1上包括相位调谐器。
电子器件可以被配置成操作相位调谐器,以便在相邻的转向波导的小平面处的输出信号之间创建相位差。电子器件可以操作相位调谐器,使得相位差是恒定的,在于它跨转向波导线性地增加。例如,电子器件可以操作相位调谐器,使得转向波导数k的调谐器诱导的相位是(k-1)α,其中k是从1到N的整数,并且当如图7所示对转向波导进行顺序编号时,表示与转向波导相关联的编号,α是在邻近的转向波导之间调谐器诱导的相位差。因此,转向波导编号k的相位是f
电子器件可以被配置成操作相位调谐器,以便调谐相位差α的值。调谐相位差α的值改变LIDAR输出信号远离芯片所行进的方向(θ)。因此,电子器件可以通过改变相位差α来扫描LIDAR输出信号。可以扫描LIDAR输出信号的角度范围是φ
可以在2018年6月5日提交并且整体地并入本文中的美国临时专利申请序列号62/680,787中找到有关根据图7所构造的光学端口26的构造和操作的附加细节。
上面的LIDAR系统可以集成在单个芯片上。包括上面的LIDAR系统的芯片可以采用各种各样的平台。合适的平台包括但不限于绝缘体上硅晶片。可以将上面的组件中的一个或多个和/或上面的组件的部分与芯片一起整合,或者可以利用诸如倒装芯片接合技术之类的技术将其放置在芯片上。例如,光源10可以包括增益元件和一个或多个其他组件,诸如波导。波导可以与芯片一起整合,并且增益元件可以是与芯片分离但是利用倒装芯片接合附接到芯片的组件。替代地,上面的LIDAR系统可以利用分立的组件构建。例如,波导的所有或部分可以是连接分立组件的光纤,包括光纤开关。替代地,LIDAR系统的一个或多个部分可以被集成在芯片上,而其他部分是分立的组件。例如,实用波导12可以是或可以包括在光源10与包括LIDAR系统的其余部分的光学芯片之间提供光学通信的光纤。
可以在平面设备光学平台(诸如绝缘体上硅平台)上构建各种各样适合与LIDAR系统一起使用的光学开关。用于集成到绝缘体上硅平台中的合适的光学开关的示例包括但不限于马赫曾德尔干涉仪。图8是马赫曾德尔干涉仪的示意图。该开关包括连接比较信号波导28和参考信号波导36的第一开关波导200。第二开关波导202连接实用波导12和LIDAR信号波导24。第一开关波导200和第二开关波导202被包括在第一光耦合器204和第二光耦合器206中。移相器208沿着第一开关波导200或第二开关波导200被定位在第一光耦合器204与第二光耦合器206之间。合适的移相器包括但不限于PIN二极管、以载流子耗尽模式工作的PN结和热加热器。电子器件可以操作移相器,以便在通过模式和切换模式之间改变开关。
上面公开了光学开关,其被配置成使得在通过模式下,将出射光信号导向LIDAR信号波导24,并且将入射光信号导向实用波导12,并且使得在切换模式下,将出射光信号导向参考信号波导36,并且将入射光信号导向比较信号波导28。然而,可以可选地布置波导,使得在切换模式下,将出射光信号导向LIDAR信号波导24,并且将入射光信号导向实用波导12,并且使得在通过模式下,将出射光信号导向参考信号波导36,并且将入射光信号导向比较信号波导28。在这些情况下,LIDAR系统可以如上文所公开地那样操作,但是其中切换模式和通过模式进行切换,以便实现上述相同的结果。作为结果,术语“通过模式”和“切换模式”需要指代特定的操作模式,而是代替地指代不同的开关操作模式,诸如第一模式和第二模式。
鉴于这些教导,本领域的普通技术人员将容易想到本发明的其他实施例、组合和修改。因此,本发明仅由所附权利要求书来限制,所附权利要求书在结合以上说明书和附图查看时包括所有这样的实施例和修改。
- LIDAR系统中的光学开关
- 用于调谐LIDAR输出信号方向的光学开关