一种荡秋千机理演示仪及其演示方法
文献发布时间:2023-06-19 12:07:15
技术领域
本发明属于教学仪器设备领域,具体涉及一种荡秋千机理演示仪及其演示方法。
背景技术
荡秋千是一项传统民间体育运动,荡秋千的方法是“高蹲低站”,即当秋千摆到最高点时迅速下蹲,当秋千摆到最低点时快速站起;荡秋千的功能原理可解释为人体四肢用力使身体质心按上述节奏上下运动做功,将人体的内能转化为系统的机械能,使得秋千越荡越高;荡秋千运动在物理上被描述为参数自激振动。
公告号为CN203677919U的中国实用新型专利,公开了一种基于自激振动的秋千模拟装置,该装置通过电机带动偏心转子实现了秋千的自激振动。公告号为CN211455041U的中国实用新型专利,公开了一种电磁秋千展示教学装置,该装置通过电磁铁吸引秋千座椅下的衔铁产生牵引作用,实现秋千摆动。公告号为CN109276888A的中国发明专利,公开了一种自动摆动角度自荡秋千,该装置通过自动调节秋千的重心位置,实现秋千自动摆动。
上述这些专利中的荡秋千装置都仅仅侧重于能够展示秋千越荡越高的现象,而未将探究物理教学中秋千运动状态和规律、荡秋千原理及能量转化机制、各种参数对荡秋千的影响,参数自激振动与共振的区别,以及如何消除自激振动这些更有理论和实践意义的内容作为关注重点。
发明内容
针对现有技术存在的不足,本发明目的在于提供一种既能让秋千越荡越高又能将秋千快速停止、在定量研究不同参数对秋千运动的影响的基础上能让实验者透彻理解荡秋千的功能原理、秋千的参数自激振动与共振的区别以及如何消除自激振动的荡秋千机理演示仪及其演示方法。
为了实现上述目的,本发明采用以下技术方案予以实现:
一种荡秋千机理演示仪,包括底座、固定安装在底座上规格相同的两对对称支杆、固定安装在一对支杆顶部的第一横梁、固定安装在另一对支杆顶部的第二横梁、转动安装在第一横梁和第二横梁之间的转轴、平行固定在转轴上的第一摆杆和规格相同的第二摆杆、固定连接在第一摆杆和第二摆杆下端的水平荡板、安装在荡板一侧的角度指针、套装在第一摆杆和第二摆杆上且分别与第一摆杆和第二摆杆滑动连接的重物托架、安放在重物托架上可拆装的砝码、安装于第一横梁外侧且与转轴连接的角度传感器、固定安装在砝码一侧用于安装轨迹绘制笔的连接杆、勾连在重物托架顶部用于提拉重物托架及砝码上下运动模拟人“高蹲低站”的牵引绳、与角度传感器通过角度传感器电缆连接用于显示与设置参数且接收角度传感器信息的控制器以及安装在一对支杆内侧上的轨迹显示屏;所述第一摆杆、第二摆杆以及荡板组成秋千架;
所述连接杆与角度指针同侧设置,所述连接杆与轨迹显示屏正对设置;所述轨迹显示屏上设置有用于角度指针指示秋千摆角的角度尺、显示秋千摆长的竖尺以及秋千在平面内的运动参考轨迹线。
进一步地,所述牵引绳通过步进电机提拉重物托架及砝码上下运动,所述步进电机固定于第二横梁的外侧下方底座上,所述牵引绳一端勾连在重物托架顶部的挂钩上,另一端绕过安装在转轴上的第一滑轮,再绕过安装在第二横梁顶部的第二滑轮缠绕在步进电机的驱动轮上;所述步进电机与控制器通过电机电缆相连。
进一步地,所述控制器内安装有电源、触摸屏、嵌入式系统、步进电机驱动器、角度传感器信号接收器以及处理电路。
进一步地,所述嵌入式系统接收并处理角度传感器信息并控制步进电机驱动器驱动步进电机并且通过触摸屏设置和显示参数;所述角度传感器用于获取砝码运动的实时角度数据;所述控制器通过触摸屏设置参数并获取角度传感器的信息精确控制步进电机按“高蹲低站”的规律拖曳砝码上下运动。
进一步地,所述控制器模拟秋千“低站”时对应的步进电机脉冲频率通过计算公式
进一步地,所述牵引绳可手动牵引以提拉砝码做上下运动。
进一步地,所述轨迹显示屏为圆弧形平板;所述角度尺为圆弧形角度尺。
进一步地,所述角度传感器为用于获取秋千摆荡时摆杆的角度,计算出角速度,角加速度,结合相关参数可计算砝码质心的坐标和速度的光电增量编码器。
一种荡秋千机理演示仪的演示方法,具体包括以下操作步骤;
步骤1:选择指定质量的砝码自上而下安置到重物托架上,开启控制器的电源使控制器和角度传感器处于待机状态;拉动牵引绳使安装在连接杆上的轨迹绘制笔处于竖尺上的某一确定位置,确定荡秋千的摆长,然后将牵引绳保持张紧状态;同时在控制器的触摸屏上确认初始牵引位置和初始摆长,触摸屏上会显示出秋千角度、角速度状态量的实时数据;
步骤2:取一张白纸贴于轨迹显示屏上,使得轨迹绘制笔的笔尖接触到白纸;
步骤3:用手拖动荡板的底部,将秋千拉开一个角度,设定荡秋千的初始摆角,然后释放荡板,则重物托架及砝码在重力作用下开始下落,在荡板开始下落但尚未到达最低点之前,操作控制器触摸屏上的控制按钮启动控制,此后拉动牵引绳按照“高蹲低站”的规律拖曳砝码上下运动,模拟出人荡秋千所做的动作;此时,角度指针在角度尺上指示出秋千摆动的摆角,轨迹绘制笔在轨迹显示屏上绘制出砝码的质心在秋千摆动平面内的运动轨迹,其运动轨迹形状与轨迹显示屏上的运动参考轨迹线形状相似;随着秋千的摆荡,秋千的最大摆角不断增加,秋千越荡越高,机械能不断增加,通过控制器的触摸屏同步显示秋千摆动的角度,角速度,角加速度,砝码沿着摆杆运动的位移、线速度,线加速度,砝码质心轨迹以及系统机械能等状态量的变化情况;
或者在按“高蹲低站”的规律拖曳砝码上下运动演示秋千越荡越高过程中,通过拖拉牵引绳改变“高蹲低站”的频率,同样使得秋千越荡越高,此时演示自激振动与共振的区别;
步骤4:演示实验需停止时,停止拉动牵引绳使得秋千在无能量输入的情况下自由摆荡,由于摩擦力的作用,秋千的摆荡幅度将越来越小最终趋于静止;或者当需要让秋千快速停止时,实验者跟随秋千的摆动节奏用手接近秋千荡板,然后缓慢用力阻止秋千的摆动,使秋千停止;或者拉动牵引绳按照“高站低蹲”的规律拖曳重物上下运动,使秋千摆荡快速停止,以此消除秋千的自激振动;
步骤5:当秋千静止后,可重新设定牵引绳的长度,改变荡秋千时的摆长,或者在重物托架上更换不同质量的砝码,也可改变初始摆角、砝码上下运动幅度和上下行速度这些参数,重新开始实验,观察各个参量对秋千摆角增幅的影响,实现荡秋千运动的定量研究。
本发明与现有技术相比,具有如下技术效果:
1)本发明通过牵引绳拖曳砝码模拟人体荡秋千的运动过程,利用控制器采集和处理角度传感器的数据并拖曳牵引绳上下提拉砝码,模拟荡秋千的“高蹲低站”的现象,能直观显示出荡秋千运动过程中的各个物理量的变化;该演示仪也能够定量研究不同参数对秋千运动的影响;有助于实验者透彻理解荡秋千的功能原理;同时也给出了探究自激振动与共振的区别以及消除自激振动的方法;
2)本发明通过实验者手动将荡板拉开一个角度然后释放,秋千即可开始摆荡,实现了对初始摆角的控制;
进一步地,本发明通过步进电机带动驱动轮转动以调节牵引绳的长度,从而调整砝码的悬挂高度,实现了对秋千摆长的调整。通过在重物托架上安置不同质量的砝码,实现了摆荡物质量的改变;
进一步地,本发明通过步进电机驱动脉冲频率设定的两个计算公式,可完成荡秋千的“高蹲低站”两个动作速度的分别控制,快速实现荡秋千的自激振动;如果交换步进电机在秋千摆到最低和最高时刻的运转方向,则完成的是“高站低蹲”动作,其作用是消耗了秋千系统的机械能,可使秋千的摆荡快速停止,实现荡秋千的自激振动消除;其中步进电机的转动圈数通过参数h来设定,实现了对砝码上下运动幅度的控制;步进电机的转速通过参数σ
进一步地,本发明通过对初始摆角、摆的长度、砝码的质量、砝码上下运动幅度和运动速度这些物理参量的改变直观地演示了各参量对秋千摆角增幅的影响,实现了对荡秋千运动的多参数定量研究;
进一步地,为增强实验者的体验感与直观感受,提高实验的参与性,本发明可以用手拖曳牵引绳来控制砝码的升降,实现人工控制的荡秋千运动;此时可以停止步进电机,仅用轨迹显示屏显示运动轨迹,通过控制器上的触摸屏显示秋千运动过程中的各个参量;手动模式既可以按“高蹲低站”的规律拖曳砝码上下运动实现秋千越荡越高;也可以通过改变“高蹲低站”的频率到合适值使得秋千越荡越高,探究自激振动与共振的区别;同样也可手动拖曳牵引绳反其道而行之,即按“高站低蹲”的规律拖曳砝码上下运动实现秋千的快速停止从而实现自激振动的消除。
附图说明
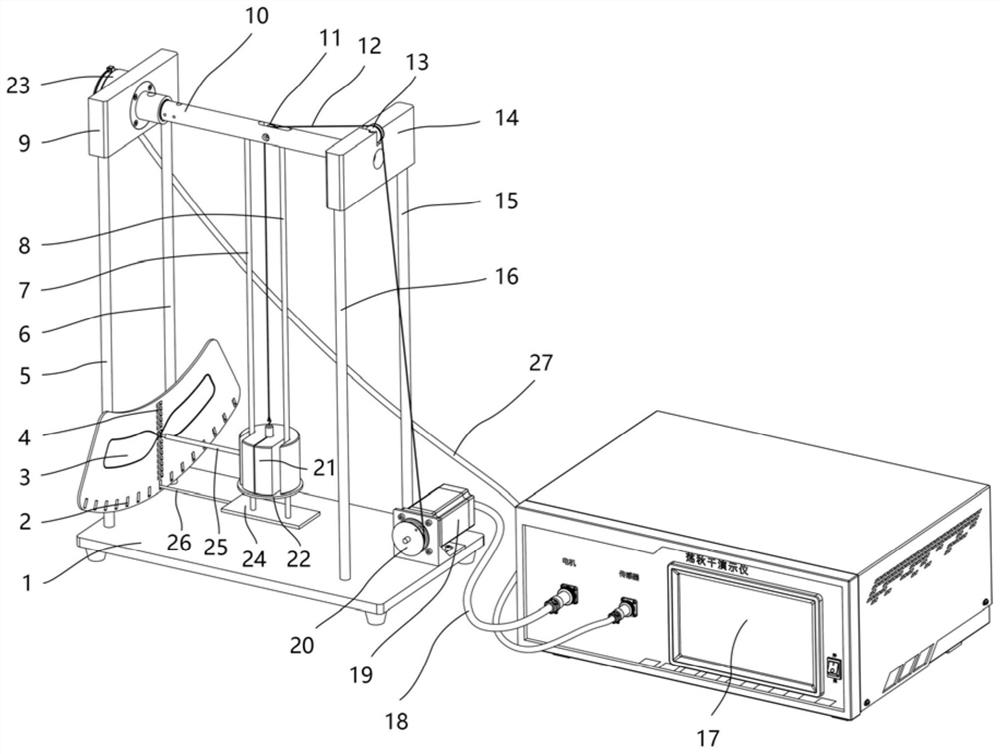
图1为本发明的立体结构示意图;
图中:1.底座,2.角度尺,3.轨迹显示屏,4.竖尺,5.第一立杆,6.第二立杆,7.第一摆杆,8.第二摆杆,9.第一横梁,10.转轴,11.第一滑轮,12.牵引绳,13.第二滑轮,14.第二横梁,15.第三立杆,16.第四立杆,17.控制器,18.电机电缆,19.步进电机,20.驱动轮,21.砝码,22.重物托架,23.角度传感器,24.荡板,25.连接杆,26.角度指针,27.角度传感器电缆。
具体实施方式
以下结合实施例对本发明的具体内容做进一步详细解释说明。
实施例1
本发明提供一种荡秋千机理演示仪,包括可稳固置于地面的长方形底座1和竖直固定在底座1上的四根长度相同的第一立杆5,第二立杆6,第三立杆15和第四立杆16。
第一立杆5和第二立杆6的顶部固定连接有第一横梁9,第三立杆15和第四立杆16的顶部固定连接有第二横梁14;第一立杆5、第二立杆6以及第一横梁9与第三立杆15、第四立杆16以及第二横梁14对称设置,第一横梁9外侧安装有与转轴10相连的角度传感器23,角度传感器23通过角度传感器电缆27连接控制器17。
第一横梁9与第二横梁14之间设置有转轴10,转轴10的一端通过轴承与第一横梁9转动连接,另一端通过轴承与第二横梁14转动连接;转轴10上沿竖直方向固定有第一摆杆7和第二摆杆8,第一摆杆7和第二摆杆8为规格相同的摆杆,且下端共同固定连接有荡板24,第一摆杆7、第二摆杆8与荡板24组成秋千架。
与第一立杆5和第二立杆6相对的荡板24侧壁上通过螺栓固定有角度指针26,第一摆杆7和第二摆杆8上共同套设有可自由滑动且顶部有吊钩用于牵引绳挂接的重物托架22,安置在重物托架22之上可拆装的砝码21,与角度指针26同侧的砝码21侧壁上固接有用于绑定马克笔的连接杆25;牵引绳12一端挂接于重物托架22顶部的吊钩上,另一端先绕过安装在转轴10上的第一滑轮11,再绕过安装在第二横梁14上的第二滑轮13后,固定绕接于第二横梁14的外侧下方底座1上的步进电机19驱动轮20上;步进电机19通过电机电缆18连接控制器17。
其中,控制器17包括电源、触摸屏、嵌入式系统、步进电机驱动器、角度传感器信号接收器与处理电路;嵌入式系统接收并处理角度传感器23传来的信息控制步进电机19启停及正反转,并依据设定参数换算相应驱动频率控制步进电机驱动器驱动步进电机19以设定的速度和加速度运行。
控制器17模拟秋千“低站”时对应的脉冲频率通过计算公式
控制器17内配有嵌入式系统,与角度传感器23和步进电机19通过电缆连接,嵌入式系统接收角度传感器23传来的实时数据来判定秋千在最低和最高点,在最低点时驱动步进电机19带动砝码21上行实现“低站”,在秋千最高点时驱动步进电机19带动砝码21下行以实现“高蹲”,使得砝码21质心的运动轨迹接近理想曲线,从而实现荡秋千能量的最佳转换。控制器17在触摸屏上实时显示秋千运动的角度、角速度,砝码21沿着摆杆运动的位移、速度,质心轨迹以及系统机械能等状态量。
第一立杆5和第二立杆6上通过螺栓固定有与连接杆25正对的轨迹显示屏3,轨迹显示屏3上设有角度指针26指示秋千摆角的角度尺2、显示秋千摆长的竖尺4以及秋千在平面内的运动参考轨迹线。
荡秋千演示仪,在未使用的情况下,摆杆处于自然静止状态,重物托架22停放于荡板24上表面,重物托架22上面没有安置砝码21,牵引绳12处于松弛状态。角度传感器23,步进电机19,控制器17均处于未通电的关机状态。
具体实验步骤为:
在重物托架22上安置指定的砝码21,开启角度传感器23,步进电机19以及触摸屏17的电源,使角度传感器23,步进电机19以及触摸屏17处于待机状态。
调节步进电机19上的驱动轮20一侧的牵引绳12长度,使连接杆25处于竖尺4上的某一确定位置,从而确定荡秋千时的初始摆长,然后将牵引绳12保持张紧状态固定在驱动轮20上。
在控制器17的触摸屏上复位角度传感器23,此时显示秋千角度、角速度、角加速度为零,其它设置信息也同时显示。
在控制器17触摸屏上设置步进电机19按“高蹲低站”的规律拖曳砝码21上下运动的参数,包括设定步进电机19的转动圈数参数h,以实现对砝码21上下运动幅度的控制,设定步进电机19的转速参数σ
取一张白纸贴于轨迹显示屏3上,在连接杆25的前端绑定一只马克笔,使得笔尖能接触到白纸。
用手拖动荡板24的底部,将秋千拉开一个角度,从而设定荡秋千的初始摆角,然后释放。同时点击控制器17触摸屏上的启动按钮,启用步进电机19控制。观察秋千随后的运动,将会看到秋千摆荡到最高点及最低点时,步进电机19按“高蹲低站”的规律拖曳砝码21上下运动,模拟出人荡秋千所做的动作。角度指针26会在角度尺2上指示出秋千摆动的摆角,马克笔在轨迹显示屏3上绘制砝码21模拟人体质心在秋千摆动平面内的运动轨迹,其轨迹形状应与屏上已有的轨迹相似。并且随着秋千的摆荡,秋千的最大摆角不断增加,秋千越荡越高,则机械能不断增加。另外在控制器17的触摸屏上也用图形方式同步显示了秋千运动的更为详尽的物理量,包括摆杆的角度,角速度,角加速度,砝码21沿着摆杆运动的位移、线速度,线加速度,质心轨迹以及系统机械能等状态量的变化情况。
演示实验需停止时,通过点触控制器17触摸屏上的停止按钮,取消步进电机19控制,则秋千在没有能量输入的情况下自由摆荡,由于摩擦力的存在,秋千的摆荡幅度将越来越小最终趋于静止。若要让秋千快速停止,实验者可跟随秋千的摆动节奏用手接近秋千荡板24,然后缓缓用力阻止秋千的摆动,使其停止下来。也可重新设置控制器17驱动步进电机19拖曳牵引绳12,按照“高站低蹲”的规律拖曳砝码21上下运动,则可使秋千的摆荡快速停止,实现荡秋千自激振动的消除。
当秋千静止后,可通过控制器17驱动步进电机运行重新设定牵引绳12的长度,从而改变摆的初始长度,或在重物托架22上更换不同质量的砝码以改变摆荡物的质量,也可对初始摆角、砝码21上下运动幅度和上下行速度的各个参量进行改变,重新开始实验,观察各个参量对秋千摆角增幅的影响,实现对荡秋千运动的定量研究。
说明:以上实验设定适用于摆角不大于90度的情况。当秋千摆角接近90度时,应当停止演示实验,停止方法如前所述。
综上所述,本发明通过步进电机19带动牵引绳12拖曳砝码21模拟人体荡秋千的运动过程,利用控制器17采集和处理角度传感器23的数据并驱动步进电机19拖曳牵引绳12上下提拉砝码21,模拟荡秋千的“高蹲低站”的现象,能直观显示出荡秋千运动过程中的各个物理量的变化;该演示仪也能够定量研究不同参数对秋千运动的影响;有助于实验者透彻理解荡秋千的功能原理;同时也给出了消除自激振动的方法。
实施例2
本发明提供一种荡秋千机理演示仪,与实施例1的不同之处在于,牵引绳12提拉砝码21上下运动的方式采用手动操作,拆除控制器17与步进电机19的连接电机电缆18以断开步进电机19的电源,将牵引绳12从步进电机19的驱动轮20上拆下,手持牵引绳12,调节牵引绳12的长度,使连接杆25处于竖尺4上的某一确定位置,从而确定荡秋千时的摆长,然后手持牵引绳12保持其处于张紧状态并静止。
开启角度传感器23和控制器17的电源,使角度传感器23和控制器17处于待机状态。
确认控制器17的触摸屏上显示出了秋千运动角度、角速度等状态量的实时数据。
取一张白纸贴于轨迹显示屏3上,在连接杆25的前端绑定一只马克笔,使得笔尖能接触到白纸。
用手拖动荡板24的底部,将秋千拉开一个角度,从而设定荡秋千的初始摆角,然后释放。观察秋千的摆动,当秋千摆到最低点时,拖动牵引绳12使砝码21升高一定高度后保持,当秋千摆到最高点时,释放牵引绳12使砝码21下降一定高度后保持,随后按照“高蹲低站”的规律拖曳砝码21上下运动,模拟出人荡秋千所做的动作。角度指针26会在角度尺2上指示出秋千摆动的摆角,马克笔在轨迹显示屏3上绘制砝码21模拟人体质心在秋千摆动平面内的运动轨迹。随着秋千的摆荡,可观察到秋千的摆角不断增加,秋千越荡越高,机械能不断增加。另外在控制器17的触摸屏上也用图形方式同步显示了秋千运动的更为详尽的物理量,包括摆杆的角度,角速度,角加速度,砝码21沿着摆杆运动的位移,线速度,线加速度,质心轨迹以及系统机械能等状态量的变化情况。
演示实验的停止,可通过停止拖动牵引绳12的动作,则秋千在没有能量输入的情况下自由摆荡,由于摩擦力的作用,秋千的摆荡幅度将越来越小最终将趋于静止。若要让秋千快速停止,实验者可跟随秋千的摆动节奏用手接近秋千荡板24,然后缓缓用力阻止秋千的摆动,使其停止。也可手动拖动牵引绳12按照“高站低蹲”的规律拖曳砝码21上下运动,来消耗秋千系统的机械能,则可使秋千的摆荡快速停止,从而实现自激振动的消除。
当秋千静止后,可重新设定牵引绳12的长度,从而改变摆的初始长度,或更换重物托架22上安置的砝码21,或者手动改变初始摆角、砝码21上下运动幅度和上下行速度这些参数,重新开始实验,观察各个参量对秋千摆角增幅的影响,实现对荡秋千运动的定量探究。
说明:以上实验设定适用于摆角不大于90度的情况。当秋千摆角接近90度时,应当停止演示实验,停止方法如前所述。
实施例3
本发明提供一种荡秋千机理演示仪,与实施例2的不同之处在于,手动拖曳牵引绳12按“高蹲低站”的规律拖曳砝码21上下运动以实现秋千越荡越高过程中,改变“高蹲低站”的频率,如在秋千的一个摆荡周期中完成2次“高蹲低站”的动作,也可在秋千的一个摆荡周期中完成1次“高蹲低站”的动作,也可在秋千的两个摆荡周期中完成1次“高蹲低站”的动作等其他情况,同样能使得秋千越荡越高,此时实验装置就可演示自激振动与共振的区别。
- 一种荡秋千机理演示仪及其演示方法
- 一种土壤形成与演变机理展教系统及演示方法