位置检测装置、摄像头模块及旋转致动器
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及一种使用磁传感器的位置检测装置、使用该位置检测装置的摄像头模块及使用该位置检测装置的旋转致动器。
背景技术
近年来,使用了磁传感器的位置检测装置在各种用途中被利用。在下文中,将使用磁传感器的位置检测装置称为磁式的位置检测装置。磁式的位置检测装置例如在内置于智能手机的具备自动聚焦机构的摄像头模块中,为了检测透镜的位置而使用。
美国专利申请公开第2016/0231528A1号中记载有如下技术:在透镜被设置为相对于基板能够移动的自动聚焦机构中,通过位置传感器检测合成矢量,该合成矢量是通过第一方向的一定大小的第一磁场和由与透镜一同移动的磁铁生成的第二方向的第二磁场的相互作用而产生的。第二方向与第一方向正交。在该技术中,第二磁场的大小根据透镜的位置而变化,其结果,合成矢量相对于第二方向形成的角度(下面称为合成矢量的角度。)也变化。根据该技术,通过检测合成矢量的角度,能够检测透镜的位置。
中国专利申请公开第109725269A号说明书中记载了一种位置检测装置,该位置检测装置使用自旋阀结构的磁阻效应元件,其具备:第一磁场产生部;第二磁场产生部,其相对于第一磁场产生部的位置能够变化;磁传感器,其生成与检测对象磁场的方向对应的检测信号,该检测对象磁场是第一磁场产生部产生的磁场和第二磁场产生部产生的磁场的合成磁场。在该位置检测装置中,当第二磁场产生部相对于第一磁场产生部的相对位置变化时,检测对象磁场的方向和强度也变化。根据该位置检测装置,通过测定检测信号,能够检测第二磁场产生部相对于第一磁场产生部的相对位置。
如美国专利申请公开第2016/0231528A1号、中国专利申请公开第109725269A号说明书中记载的那样,在磁式的位置检测装置中,当位置检测装置的检测对象物(下面称为对象物。)的位置变化时,磁传感器的检测对象的磁场(下面称为对象磁场。)的方向也变化。另外,当对象磁场的方向变化时,检测信号也变化。优选的是,检测信号相对于对象物的位置的变化线性地变化。此外,检测信号“线性地变化”是指,在表示对象物的位置和检测信号的关系的特性图中,检测信号相对于对象物的位置的变化直线地或大致直线地变化。另外,检测信号“非线性地变化”是指,在上述特性图中,检测信号相对于对象物的位置的变化曲线地变化等、未直线地或大致直线地变化。
为了使检测信号相对于对象物的位置的变化线性地变化,优选的是,对象磁场的方向相对于对象物的位置的变化线性地变化,且检测信号相对于对象磁场的方向的变化线性地变化。中国专利申请公开第109725269A号说明书的图10中公开了:对象磁场的方向相对于基准方向形成的角度,相对于第二磁场产生部相对于第一磁场产生部的相对位置的变化而线性地变化。
但是,实际上,由于机构上的限制,对象磁场的方向的变化相对于对象物的位置的变化的方式有时不得不成为非线性地变化的方式。美国专利申请公开第2016/0231528A1号的图8B中公开了:合成矢量的角度相对于与透镜一同移动的磁铁的位置的变化曲线地即非线性地变化。在这种情况下,检测信号相对于对象物的位置的变化非线性地变化,因此需要进行用于修正检测信号的处理。
发明内容
发明所要解决的问题
本发明的目的在于提供一种位置检测装置和使用该位置检测装置的摄像头模块及使用该位置检测装置的旋转致动器,该位置检测装置是使用磁传感器的位置检测装置,即使在对象磁场的方向相对于对象物的位置的变化非线性地变化的情况下,也能使检测信号相对于对象物的位置的变化线性地变化。
用于解决问题的技术方案
本发明的位置检测装置是用于检测位置能够变化的对象物的位置的位置检测装置。本发明的位置检测装置具备:磁场产生器,其产生对象磁场,并且以当对象物的位置变化时,使基准平面内的检测位置处的对象磁场的方向发生变化的方式构成;以及磁传感器,其检测对象磁场,生成与对象磁场的方向对应的检测信号。
磁场产生器构成为:对象磁场的方向的变化相对于对象物的位置的变化的方式为相对于对象物的位置的变化非线性地变化。磁传感器构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。
在本发明的位置检测装置中,也可以是,在基准平面内对象磁场的方向相对于基准方向形成的对象角度在与对象物的位置的可动范围对应的第一可变范围内变化。在该情况下,也可以是,检测信号在与第一可变范围对应的第二可变范围内变化。另外,在该情况下,也可以是,磁传感器包含至少一个磁阻效应元件。也可以是,至少一个磁阻效应元件的各个以包含平行于基准平面且具有方向固定的第一磁化的磁化固定层、和平行于基准平面且具有方向能够根据对象磁场的方向而变化的第二磁化的自由层,并且对象物位于可动范围的中央时的、第二磁化的方向相对于第一磁化的方向形成的角度为0°以上70°以下的范围内、110°以上250°以下的范围内、或290°以上且小于360°的范围内的方式构成。
另外,在本发明的位置检测装置中,也可以是,在磁传感器包含至少一个磁阻效应元件的情况下,至少一个磁阻效应元件的各个以对象物位于可动范围的中央时的、第二磁化的方向相对于第一磁化的方向形成的角度为10°以上60°以下的范围内、120°以上170°以下的范围内、190°以上240°以下的范围内、或300°以上350°以下的范围内的方式构成。
另外,在本发明的位置检测装置中,也可以是,在磁传感器包含至少一个磁阻效应元件的情况下,至少一个磁阻效应元件为至少一个第一磁阻效应元件和至少一个第二磁阻效应元件。另外,也可以是,磁传感器还包含具有规定的电阻值的电阻器、施加有规定的电压的电源端口、与地线连接的接地端口、以及输出端口。在该情况下,至少一个第一磁阻效应元件设置于电源端口和输出端口之间。至少一个第二磁阻效应元件设置于输出端口和接地端口之间。
也可以是,电阻器以设置于电源端口和输出端口之间的方式与至少一个第一磁阻效应元件串联连接,或者,以设置于输出端口和接地端口之间的方式与至少一个第二磁阻效应元件串联连接。至少一个第一磁阻效应元件的各自的磁化固定层的第一磁化的方向为第一方向。至少一个第二磁阻效应元件的各自的磁化固定层的第一磁化的方向为与第一方向相反的第二方向。检测信号取决于输出端口的电位。
另外,在本发明的位置检测装置中,也可以是,在磁传感器包含至少一个磁阻效应元件的情况下,至少一个磁阻效应元件为至少一个第一磁阻效应元件、至少一个第二磁阻效应元件、至少一个第三磁阻效应元件、和至少一个第四磁阻效应元件。另外,也可以是,磁传感器还包含各自具有规定的电阻值的第一电阻器及第二电阻器、施加有规定的电压的电源端口、与地线连接的接地端口、第一输出端口、以及第二输出端口。在该情况下,至少一个第一磁阻效应元件设置于电源端口和第一输出端口之间。至少一个第二磁阻效应元件设置于第一输出端口和接地端口之间。至少一个第三磁阻效应元件设置于电源端口和第二输出端口之间。至少一个第四磁阻效应元件设置于第二输出端口和接地端口之间。
也可以是,第一电阻器和第二电阻器中,第一电阻器以设置于电源端口和第一输出端口之间的方式,第一电阻器与至少一个第一磁阻效应元件串联连接,且第二电阻器以设置于第二输出端口和接地端口之间的方式,第二电阻器与至少一个第四磁阻效应元件串联连接,或者,第一电阻器以设置于第一输出端口和接地端口之间的方式,第一电阻器与至少一个第二磁阻效应元件串联连接,且第二电阻器以设置于电源端口和第二输出端口之间的方式,第二电阻器与至少一个第三磁阻效应元件串联连接。至少一个第一磁阻效应元件的各自的磁化固定层的第一磁化的方向和至少一个第四磁阻效应元件的各自的磁化固定层的第一磁化的方向为第一方向。至少一个第二磁阻效应元件的各自的磁化固定层的第一磁化的方向和至少一个第三磁阻效应元件的各自的磁化固定层的第一磁化的方向为与第一方向相反的第二方向。检测信号取决于第一输出端口和第二输出端口的电位差。
另外,在本发明的位置检测装置中,也可以是,对象物的位置在直线的方向上变化。在该情况下,也可以是,磁场产生器包含产生第一磁场的第一磁场产生部和产生第二磁场的第二磁场产生部。也可以是,第二磁场产生部相对于第一磁场产生部的相对位置伴随对象物的位置的变化而变化。也可以是,当设检测位置处的、平行于基准平面的第一磁场的分量为第一磁场分量,设检测位置处的、平行于基准平面的第二磁场的分量为第二磁场分量时,第一磁场产生部和第二磁场产生部以当第二磁场产生部相对于第一磁场产生部的相对位置变化时,第一磁场分量的强度及第一磁场分量的方向和第二磁场分量的方向未变化,但第二磁场分量的强度发生变化的方式构成。也可以是,对象磁场为第一磁场分量和第二磁场分量的合成磁场。
也可以是,在磁场产生器包含第一及第二磁场产生部的情况下,第一磁场产生部具有配置于互不相同的位置的两个磁铁。也可以是,第一磁场为合成有两个磁铁分别产生的两个磁场的磁场。另外,在该情况下,也可以是,本发明的位置检测装置还具备:第一保持部件,其保持第一磁场产生部;以及第二保持部件,其设置为相对于第一保持部件在一个方向上能够变更位置,且保持第二磁场产生部。
在本发明的位置检测装置具备第一及第二保持部件的情况下,也可以是,对象物为透镜。也可以是,第二保持部件是保持透镜的部件,且设置为相对于第一保持部件在透镜的光轴方向上能够变更位置。
另外,在本发明的位置检测装置中,也可以是,对象物为其位置沿以中心轴为中心的旋转方向变化的旋转体。在该情况下,也可以是,磁场产生器与旋转体连接。
本发明的摄像头模块具备:透镜,其位置在直线的方向上能够变化;位置检测装置,其用于检测透镜的位置;保持部件,其保持透镜;以及驱动装置,其使保持部件移动。位置检测装置包含:磁场产生器,其产生对象磁场,并且以当透镜的位置变化时,使基准平面内的检测位置处的对象磁场的方向发生变化的方式构成;以及磁传感器,其检测对象磁场,生成与对象磁场的方向对应的检测信号。磁场产生器构成为:对象磁场的方向的变化相对于透镜的位置的变化的方式为相对于透镜的位置的变化非线性地变化。磁传感器构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。
本发明的旋转致动器具备:旋转体,其位置沿以中心轴为中心的旋转方向能够变化;位置检测装置,其用于检测旋转体的位置;以及驱动装置,其使旋转体旋转。位置检测装置包含:磁场产生器,其产生对象磁场,并且以当旋转体的位置变化时,使基准平面内的检测位置处的对象磁场的方向发生变化的方式构成;以及磁传感器,其检测对象磁场,生成与对象磁场的方向对应的检测信号。磁场产生器构成为:对象磁场的方向的变化相对于旋转体的位置的变化的方式为相对于旋转体的位置的变化非线性地变化。磁传感器构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。
发明效果
在本发明的位置检测装置、摄像头模块及旋转致动器中,磁场产生器构成为:对象磁场的方向的变化相对于对象物的位置的变化的方式为相对于对象物的位置的变化非线性地变化,磁传感器构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。由此,根据本发明的位置检测装置,即使在对象磁场的方向相对于对象物的位置的变化非线性地变化的情况下,也可以使检测信号相对于对象物的位置的变化线性地变化。同样,根据本发明的摄像头模块,即使在对象磁场的方向相对于透镜的位置的变化非线性地变化的情况下,也可以使检测信号相对于透镜的位置的变化线性地变化。同样,根据本发明的旋转致动器,即使在对象磁场的方向相对于旋转体的位置的变化非线性地变化的情况下,也可以使检测信号相对于旋转体的位置的变化线性地变化。
本发明的其它目的、特征及利益通过以下说明将变得十分清晰。
附图说明
图1是表示本发明的第一实施方式所涉及的摄像头模块的立体图。
图2是示意性表示本发明的第一实施方式所涉及的摄像头模块的内部的说明图。
图3是表示本发明的第一实施方式所涉及的位置检测装置和驱动装置的立体图。
图4是表示图1中的驱动装置的多个线圈的立体图。
图5是表示图1中的驱动装置的主要部分的侧视图。
图6是表示本发明的第一实施方式所涉及的位置检测装置的主要部分的立体图。
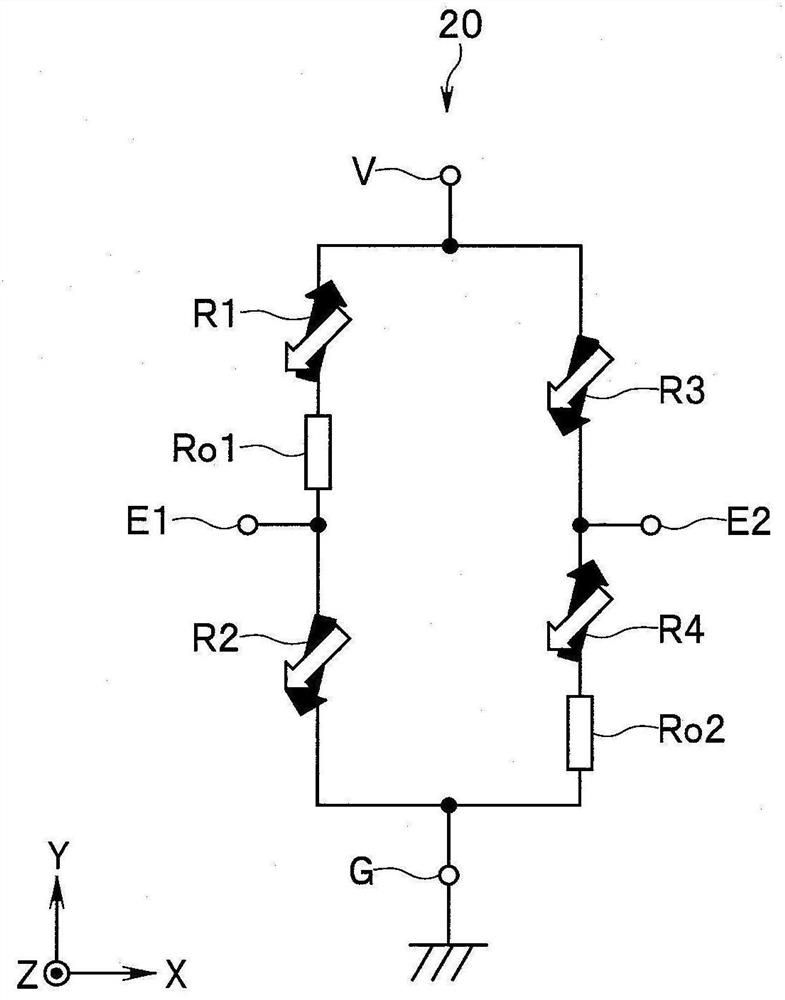
图7是表示本发明的第一实施方式的磁传感器的结构的电路图。
图8是表示图7中的一个电阻部的一部分的立体图。
图9是表示本发明的第一实施方式的相对位置和第一及第二磁场分量的关系的特性图。
图10是表示本发明的第一实施方式的相对位置和对象角度的关系的特性图。
图11是表示本发明的第一实施方式的相对角度和检测信号的关系的特性图。
图12是表示本发明的第一实施方式的对象角度和检测信号的关系的示意图。
图13是表示第一比较例的位置检测装置中的第一及第二磁化的方向的说明图。
图14是表示第一实施例的位置检测装置中的第一及第二磁化的方向的说明图。
图15是表示第一比较例的位置检测装置和第一实施例的位置检测装置各自的相对位置和相对角度的关系的特性图。
图16是表示第一比较例的位置检测装置中的相对位置和检测信号及第三线性参数的关系的特性图。
图17是表示第一实施例的位置检测装置中的相对位置和检测信号及第三线性参数的关系的特性图。
图18是表示第二比较例的位置检测装置中的磁传感器的结构的电路图。
图19是表示第二比较例的位置检测装置中的相对位置和检测信号的关系的特性图。
图20是表示本发明的第二实施方式所涉及的旋转致动器的俯视图。
图21是表示本发明的第二实施方式的旋转位置和对象角度的关系的特性图。
图22是表示第三比较例的位置检测装置中的相对位置和检测信号的关系的特性图。
图23是表示第二实施例的位置检测装置中的相对位置和检测信号的关系的特性图。
图24是表示第三比较例的位置检测装置与第二实施例的位置检测装置各自的旋转位置和第三线性参数的关系的特性图。
具体实施方式
[第一实施方式]
下面,参照附图对本发明的实施方式进行详细说明。首先,参照图1及图2对本发明的第一实施方式的摄像头模块的结构进行说明。图1是表示摄像头模块100的立体图。图2是示意性表示摄像头模块100的内部的说明图。此外,在图2中,为了容易理解,按照与图1中的对应的各部分不同的尺寸及配置描绘摄像头模块100的各部分。本实施方式的摄像头模块100例如构成具备光学式手抖动修正机构和自动聚焦机构的智能手机用的摄像头的一部分,与使用CMOS等的图像传感器110组合而使用。
本实施方式所涉及的摄像头模块100具备本实施方式所涉及的位置检测装置1、驱动装置3、透镜5、框体6以及基板7。本实施方式所涉及的位置检测装置1是磁式的位置检测装置,用于在进行自动调焦时检测透镜5的位置。驱动装置3是使透镜5移动的装置。框体6是保护位置检测装置1和驱动装置3的部件。基板7具有上表面7a。此外,图1中省略了基板7,图2中省略了框体6。
在此,如图1及图2所示,定义U方向、V方向、Z方向。U方向、V方向、Z方向相互正交。在本实施方式中,将垂直于基板7的上表面7a的一个方向(图2中朝向上侧的方向)设为Z方向。U方向和V方向均为相对于基板7的上表面7a平行的方向。另外,将与U方向相反的方向设为-U方向,将与V方向相反的方向设为-V方向,将与Z方向相反的方向设为-Z方向。另外,在下文中,将相对于基准位置处于Z方向的前端的位置称为“上方”,将相对于基准位置处于与“上方”相反侧的位置称为“下方”。
透镜5以其光轴方向与平行于Z方向的方向一致的姿势配置于基板7的上表面7a的上方。另外,基板7具有使通过了透镜5的光通过的未图示的开口部。如图2所示,摄像头模块100以通过了透镜5及未图示的开口部的光入射于图像传感器110的方式为相对于图像传感器110位置对准。
接下来,参照图2至图5对本实施方式所涉及的位置检测装置1和驱动装置3进行详细说明。图3是表示位置检测装置1和驱动装置3的立体图。图4是表示驱动装置3的多个线圈的立体图。图5是表示驱动装置3的主要部分的侧视图。
位置检测装置1具备第一保持部件14、第二保持部件15、多个第一导线16以及多个第二导线17。第二保持部件15是保持透镜5的部件。虽未图示,但第二保持部件15具有例如以能够在其内部安装透镜5的方式构成的筒状的形状。
第二保持部件15设置为相对于第一保持部件14在一个方向,具体而言,在透镜5的光轴方向、即平行于Z方向的方向上能够变更位置。在本实施方式中,第一保持部件14具有以能够在其内部容纳透镜5和第二保持部件15的方式构成的箱状的形状。多个第二导线17连接第一保持部件14和第二保持部件15,并以第二保持部件15能够相对于第一保持部件14在平行于Z方向的方向上移动的方式,支持第二保持部件15。
第一保持部件14设置为在基板7的上表面7a的上方,相对于基板7在平行于U方向的方向和平行于V方向的方向上能够变更位置。多个第一导线16连接基板7和第一保持部件14,并以第一保持部件14能够相对于基板7在平行于U方向的方向和平行于V方向的方向上移动的方式,支持第一保持部件14。当第一保持部件14相对于基板7的相对位置变化时,则第二保持部件15相对于基板7的相对位置也变化。
驱动装置3具备磁铁31A、31B、32A、32B、33A、33B、34A、34B和线圈41、42、43、44、45、46。磁铁31A配置于透镜5的-V方向的一端。磁铁32A配置于透镜5的V方向的一端。磁铁33A配置于透镜5的-U方向的一端。磁铁34A配置于透镜5的U方向的一端。磁铁31B、32B、33B、34B分别配置于磁铁31A、32A、33A、34A的上方。另外,磁铁31A、31B、32A、32B、33A、33B、34A、34B固定于第一保持部件14。
如图3所示,磁铁31A、31B、32A、32B分别具有U方向上长的长方体形状。磁铁33A、33B、34A、34B分别具有V方向上长的长方体形状。磁铁31A、32B的磁化的方向为V方向。磁铁31B、32A的磁化的方向为-V方向。磁铁33A、34B的磁化的方向为U方向。磁铁33B、34A的磁化的方向为-U方向。在图5中,磁铁31A、31B内描绘的箭头表示磁铁31A、31B的磁化的方向。
线圈41配置于磁铁31A和基板7之间。线圈42配置于磁铁32A和基板7之间。线圈43配置于磁铁33A和基板7之间。线圈44配置于磁铁34A和基板7之间。线圈45配置于磁铁31A、31B和透镜5之间。线圈46配置于磁铁32A、32B和透镜5之间。另外,线圈41、42、43、44固定于基板7。线圈45、46固定于第二保持部件15。
在线圈41主要施加有由磁铁31A产生的磁场。在线圈42主要施加有由磁铁32A产生的磁场。在线圈43主要施加有由磁铁33A产生的磁场。在线圈44主要施加有由磁铁34A产生的磁场。
另外,如图2、图4及图5所示,线圈45包含沿着磁铁31A向U方向延伸的第一导体部45A、沿着磁铁31B向U方向延伸的第二导体部45B、以及连接第一及第二导体部45A、45B的两个第三导体部。另外,如图2及图4所示,线圈46包含沿着磁铁32A向U方向延伸的第一导体部46A、沿着磁铁32B向U方向延伸的第二导体部46B、以及连接第一及第二导体部46A、46B的两个第三导体部。
在线圈45的第一导体部45A主要施加有由磁铁31A产生的磁场的V方向的分量。在线圈45的第二导体部45B主要施加有由磁铁31B产生的磁场的-V方向的分量。在线圈46的第一导体部46A主要施加有由磁铁32A产生的磁场的-V方向的分量。在线圈46的第二导体部46B主要施加有由磁铁32B产生的磁场的V方向的分量。
位置检测装置1还具备磁场产生器10和磁传感器20。磁场产生器10产生磁传感器20应检测的磁场(检测对象磁场)、即对象磁场MF。在本实施方式中,磁场产生器10包含产生第一磁场的第一磁场产生部11和产生第二磁场的第二磁场产生部12。第一磁场产生部11具有配置于互不相同的位置的两个磁铁。在本实施方式中,特别地,第一磁场产生部11具有磁铁31A、34A作为上述两个磁铁。第一磁场是由磁铁31A、34A分别产生的磁场合成的磁场。如上所述,磁铁31A、34A固定于第一保持部件14。因此,第一磁场产生部11由第一保持部件14保持。
如图3所示,磁铁31A具有位于磁铁31A的U方向的一端的端面31A1。磁铁34A具有位于磁铁34A的-V方向的一端的端面34A1。
第二磁场产生部12以相对于第一磁场产生部11的相对位置能够变化的方式设置。在本实施方式中,第二磁场产生部12具有磁铁13。第二磁场是由磁铁13产生的磁场。磁铁13具有长方体形状。另外,磁铁13在磁铁31A的端面31A1及磁铁34A的端面34A1附近的空间内,固定于第二保持部件15。由此,第二磁场产生部12由第二保持部件15保持。当第二保持部件15相对于第一保持部件14的相对位置在平行于Z方向的方向上变化时,则第二磁场产生部12相对于第一磁场产生部11的相对位置在平行于Z方向的方向上也变化。
磁传感器20包含至少一个磁阻效应元件。在下文中,将磁阻效应元件记为MR元件。磁传感器20检测基准平面内的检测位置处的对象磁场MF,生成与对象磁场MF的方向相对应的检测信号。磁传感器20在磁铁31A的端面31A1和磁铁34A的端面34A1附近固定于基板7。从磁铁31A到磁传感器20的距离和从磁铁34A到磁传感器20的距离彼此相等。磁铁13配置于磁传感器20的上方。
检测位置是磁传感器20检测第一磁场和第二磁场的位置。在本实施方式中,基准平面是包含检测位置且与Z方向垂直的平面。当第二磁场产生部12相对于第一磁场产生部11的相对位置变化时,检测位置和第二磁场产生部12之间的距离也变化。
在此,设检测位置处的平行于基准平面的第一磁场的分量为第一磁场分量MF1,设检测位置处的平行于基准平面的第二磁场的分量为第二磁场分量MF2。对象磁场MF是第一磁场分量MF1和第二磁场分量MF2的合成磁场。此外,第一及第二磁场分量MF1、MF2和对象磁场MF在之后说明的图6中示出。
在下文中,对第一磁场产生部11、第二磁场产生部12及磁传感器20的位置关系、和磁传感器20的结构进行进一步详细说明。
驱动装置3还具备在线圈41、42的一个内侧固定于基板7的磁传感器30和在线圈43、44的一个内侧固定于基板7的磁传感器30。在此,设两个磁传感器30分别配置于线圈41的内侧和线圈44的内侧。如之后说明的那样,这两个磁传感器30是为了降低手抖动的影响而在使透镜5的位置变化时使用的。
配置于线圈41的内侧的磁传感器30检测由磁铁31A产生的磁场,生成与磁铁31A的位置对应的信号。配置于线圈44的内侧的磁传感器30检测由磁铁34A产生的磁场,生成与磁铁34A的位置对应的信号。磁传感器30例如由霍尔元件等的检测磁场的元件构成。
接下来,参照图3及图6,对第一磁场产生部11、第二磁场产生部12及磁传感器20的位置关系进行详细说明。图6是表示位置检测装置1的主要部分的立体图。在此,如图6所示,定义X方向和Y方向。X方向和Y方向均为相对于基板7的上表面7a(参照图2)平行的方向。X方向是从U方向朝向V方向旋转45°的方向。Y方向是从V方向朝向-U方向旋转45°的方向。另外,将与X方向相反的方向设为-X方向,将与Y方向相反的方向设为-Y方向。
图6中,带符号MF1的箭头表示第一磁场分量MF1。在本实施方式中,第一磁场产生部11和磁传感器20以第一磁场分量MF1的方向成为-Y方向的方式设置。第一磁场分量MF1的方向例如能够根据磁铁31A、34A相对于磁传感器20的位置关系和磁铁31A、34A的姿势进行调整。磁铁31A、34A优选相对于包含检测位置的YZ平面对称地配置。
图6中,带符号MF2的箭头表示第二磁场分量MF2。另外,磁铁13内描绘的箭头表示磁铁13的磁化的方向。第二磁场分量MF2的方向与第一磁场分量MF1的方向不同。对象磁场MF的方向也与第一磁场分量MF1的方向和第二磁场分量MF2的方向中的任一个均不同,是它们之间的方向。对象磁场MF的方向的可变范围小于180°。在本实施方式中,特别地,第二磁场分量MF2的方向是与第一磁场分量MF1的方向正交的-X方向。该情况下的对象磁场MF的方向的可变范围小于90°。
接下来,参照图7,对磁传感器20的结构的一例进行说明。图7是表示磁传感器20的结构的电路图。在本实施方式中,磁传感器20以生成与对象磁场MF的方向相对于基准方向形成的角度对应的检测信号作为与对象磁场MF的方向对应的检测信号的方式构成。在本实施方式中,基准方向为X方向。
如图7所示,磁传感器20包含施加规定的电压的电源端口V、与地线连接的接地端口G、第一输出端口E1、第二输出端口E2、第一电阻部R1、第二电阻部R2、第三电阻部R3、以及第四电阻部R4。第一电阻部R1设置于电源端口V和第一输出端口E1之间。第二电阻部R2设置于第一输出端口E1和接地端口G之间。第三电阻部R3设置于电源端口V和第二输出端口E2之间。第四电阻部R4设置于第二输出端口E2和接地端口G之间。
第一电阻部R1包含至少一个第一MR元件。第二电阻部R2包含至少一个第二MR元件。第三电阻部R3包含至少一个第三MR元件。第四电阻部R4包含至少一个第四MR元件。
在本实施方式中,特别地,第一电阻部R1包含多个串联连接的第一MR元件,第二电阻部R2包含多个串联连接的第二MR元件,第三电阻部R3包含多个串联连接的第三MR元件,第四电阻部R4包含多个串联连接的第四MR元件。
磁传感器20还包含各自具有规定的电阻值的第一电阻器Ro1及第二电阻器Ro2。第一电阻器Ro1以第一电阻器Ro1设置于电源端口V和第一输出端口E1之间的方式,与至少一个第一MR元件串联连接。第二电阻器Ro2以第二电阻器Ro2设置于第二输出端口E2和接地端口G之间的方式,与至少一个第四MR元件串联连接。在图7所示的例子中,第一电阻器Ro1设置于第一电阻部R1和第一输出端口E1之间。另外,第二电阻器Ro2设置于第四电阻部R4和接地端口G之间。
磁传感器20中包含的多个MR元件的各个是自旋阀型的MR元件。该自旋阀型的MR元件具有平行于基准平面且具有方向被固定的第一磁化的磁化固定层、平行于基准平面且具有方向能够根据对象磁场MF的方向而变化的第二磁化的自由层、以及配置于磁化固定层和自由层之间的间隙层。自旋阀型的MR元件可以为TMR(隧道磁阻效应)元件,也可以为GMR(巨磁阻效应)元件。在TMR元件中,间隙层为隧道势垒层。在GMR元件中,间隙层为非磁性导电层。在自旋阀型的MR元件中,电阻值根据自由层的第二磁化的方向相对于磁化固定层的第一磁化的方向形成的角度而变化,当该角度为0°时,电阻值成为最小值,当角度为180°时,电阻值成为最大值。在图7中,实心的箭头表示MR元件中的磁化固定层的磁化的方向,空心的箭头表示MR元件中的自由层的磁化的方向。
第一及第四电阻部R1、R4中包含的多个MR元件中的磁化固定层的第一磁化的方向为第一方向。第二及第三电阻部R2、R3中包含的多个MR元件中的磁化固定层的第一磁化的方向为与第一方向相反的第二方向。
从MR元件的制作的精度等观点来看,第一至第四电阻部R1~R4内的多个MR元件中的磁化固定层的第一磁化的方向也可以略微偏离上述的方向。
输出端口E1的电位、输出端口E2的电位、以及输出端口E1、E2的电位差根据对象磁场MF的方向相对于第一方向形成的角度的余弦而变化。磁传感器20输出与输出端口E1、E2的电位差对应的信号作为检测信号。检测信号取决于输出端口E1的电位、输出端口E2的电位、以及输出端口E1、E2的电位差。另外,检测信号由于根据对象磁场MF的方向而变化,因此是与对象磁场MF的方向对应的信号。
磁传感器20还可以包含未图示的差分检测器。未图示的差分检测器输出与输出端口E1、E2的电位差对应的信号作为检测信号。
在此,参照图8对电阻部R1、R2、R3、R4的结构的一例进行说明。图8是表示电阻部R1、R2、R3、R4中的一个电阻部的一部分的立体图。在该例中,一个电阻部具有多个下部电极62、多个MR元件50、以及多个上部电极63。多个下部电极62配置于未图示的基板上。各个下部电极62具有细长的形状。在下部电极62的长边方向上相邻的两个下部电极62之间形成有间隙。如图8所示,在下部电极62的上表面上,在长边方向的两端的附近,分别配置有MR元件50。MR元件50包含从下部电极62侧依次层叠的自由层51、间隙层52、磁化固定层53及反铁磁性层54。自由层51与下部电极62电连接。反铁磁性层54由反铁磁性材料构成,使其与磁化固定层53之间发生交换耦合而将磁化固定层53的磁化方向固定。多个上部电极63配置于多个MR元件50上。各个上部电极63具有细长的形状,配置于在下部电极62的长边方向上相邻的两个下部电极62上且电连接相邻的两个MR元件50的反铁磁性层54彼此。通过这种结构,图8所示的电阻部具有通过多个下部电极62和多个上部电极63串联连接的多个MR元件50。
此外,MR元件50中的层51~54的配置可以与图8所示的配置上下相反。另外,MR元件50可以为不包含反铁磁性层54的结构。该结构例如可以为包含两个铁磁性层和配置于这两个铁磁性层之间的非磁性金属层的包含人工反铁磁性结构的磁化固定层的结构,作为反铁磁性层54及磁化固定层53的代替。
接下来,参照图2~图5对驱动装置3的动作进行说明。首先,对光学式手抖动修正机构和自动聚焦机构进行简单说明。驱动装置3构成光学式手抖动修正机构及自动聚焦机构的一部分。驱动装置3、光学式手抖动修正机构及自动聚焦机构由摄像头模块100的外部的未图示的控制部控制。
光学式手抖动修正机构例如以能够通过摄像头模块100的外部的陀螺仪传感器等检测手抖动的方式构成。当光学式手抖动修正机构检测手抖动时,未图示的控制部以根据手抖动的方式使透镜5相对于基板7的相对位置发生变化的方式,控制驱动装置3。由此,能够使透镜5的绝对位置稳定化,从而可以降低手抖动的影响。此外,透镜5相对于基板7的相对位置根据手抖动的方式在平行于U方向的方向或平行于V方向的方向上变化。
自动聚焦机构例如以能够通过图像传感器110或自动聚焦传感器等检测焦点对准被摄体的状态的方式构成。未图示的控制部以成为焦点对准被摄体的状态的方式,通过驱动装置3使透镜5相对于基板7的相对位置在平行于Z方向的方向上变化。由此,能够自动进行对被摄体的对焦。
接下来,对与光学式手抖动修正机构相关的驱动装置3的动作进行说明。当通过未图示的控制部在线圈41、42中流通电流时,通过由磁铁31A、32A产生的磁场和由线圈41、42产生的磁场的相互作用,固定有磁铁31A、32A的第一保持部件14沿平行于V方向的方向移动。其结果,透镜5也沿平行于V方向的方向移动。另外,当通过未图示的控制部在线圈43、44中流通电流时,通过由磁铁33A、34A产生的磁场和由线圈43、44产生的磁场的相互作用,固定有磁铁33A、34A的第一保持部件14沿平行于U方向的方向移动。其结果,透镜5也沿平行于U方向的方向移动。未图示的控制部通过测定与由两个磁传感器30生成的磁铁31A、34A的位置对应的信号,从而检测透镜5的位置。
接下来,对与自动聚焦机构相关的驱动装置3的动作进行说明。在使透镜5相对于基板7的相对位置在Z方向上移动的情况下,未图示的控制部以使电流在第一导体部45A沿U方向流通,且使电流在第二导体部45B沿-U方向流通的方式,在线圈45中流通电流,并且以使电流在第一导体部46A沿-U方向流通,且使电流在第二导体部46B沿U方向流通的方式,在线圈46中流通电流。通过这些电流和由磁铁31A、31B、32A、32B产生的磁场,Z方向的洛伦兹力作用于线圈45的第一及第二导体部45A、45B和线圈46的第一及第二导体部46A、46B。由此,固定有线圈45、46的第二保持部件15沿Z方向移动。其结果,透镜5也沿Z方向移动。
在使透镜5相对于基板7的相对位置沿-Z方向移动的情况下,未图示的控制部在线圈45、46沿与沿Z方向移动的情况相反方向流通电流。
接下来,对本实施方式的位置检测装置1的作用及效果进行说明。位置检测装置1是为了检测位置能够变化的对象物的位置而使用的。在本实施方式中,对象物为位置在直线方向上变化的透镜5。本实施方式所涉及的位置检测装置1是为了检测透镜5的位置而使用的。
磁场产生器10以当对象物即透镜5的位置变化时,基准平面内的检测位置处的对象磁场MF的方向也变化的方式构成。在本实施方式中,磁场产生器10包含第一磁场产生部11和第二磁场产生部12。在透镜5相对于基板7的相对位置变化的情况下,第二保持部件15相对于基板7及第一保持部件14的相对位置也变化。如上所述,第一保持部件14保持第一磁场产生部11,第二保持部件15保持第二磁场产生部12。因此,如上所述,当透镜5的相对位置变化时,第二磁场产生部12相对于第一磁场产生部11的相对位置也变化。在下文中,将第二磁场产生部12相对于第一磁场产生部11的相对位置称为相对位置,以记号PR表示。在本实施方式中,相对位置的变化的方向是透镜5的光轴方向即平行于Z方向的方向。
当相对位置变化时,第一磁场产生部11相对于基板7的相对位置未变化,但第二磁场产生部12相对于基板7的相对位置发生变化。因此,当相对位置变化时,第一磁场分量MF1的强度及方向和第二磁场分量MF2的方向未变化,但第二磁场分量MF2的强度发生变化。当第二磁场分量MF2的强度变化时,对象磁场MF的方向和强度也变化,伴随于此,磁传感器20生成的检测信号的值也变化。检测信号的值取决于相对位置而变化。未图示的控制部通过测定检测信号,检测相对位置。透镜5相对于基板7的相对位置的变化的方向及大小与相对位置的变化的方向及大小相同。因此,也可以说相对位置表示透镜5的位置,具体表示透镜5相对于基板7的相对位置。
在本实施方式中,设第二磁场产生部12最接近检测位置时的检测位置和第二磁场产生部12之间的距离为最短距离,以处于任意位置的第二磁场产生部12和检测位置之间的距离减去最短距离所得的值表示相对位置。另外,将对象磁场MF的方向相对于基准方向即X方向形成的角度称为对象角度,以记号θ表示。图6中示出了对象角度θ。在图6中,带记号DR的箭头表示基准方向。对象角度θ表示对象磁场MF的方向。在本实施方式中,磁传感器20生成与对象角度θ对应的检测信号。
下面,对相对位置和对象角度θ的关系进行说明。图9是表示相对位置和第一及第二磁场分量MF1、MF2的关系的特性图。在图9中,横轴表示相对位置,纵轴表示与第一及第二磁场分量MF1、MF2的强度对应的磁通密度的大小。另外,在图9中,符号71表示与第一磁场分量MF1的强度对应的磁通密度,符号72表示与第二磁场分量MF2的强度对应的磁通密度。如图9所示,当相对位置变化时,与第一磁场分量MF1的强度对应的磁通密度71未变化,但与第二磁场分量MF2的强度对应的磁通密度72发生变化。
图10是表示相对位置和对象角度θ的关系的特性图。在图10中,横轴表示相对位置,纵轴表示对象角度θ。另外,在图10中,符号73表示示出相对位置和对象角度θ的关系的曲线,符号74表示连接符号73所示的曲线的两端的线段。
在此,着眼于对象角度θ的变化相对于相对位置的变化的方式。在本实施方式中,在图10那样的表示两个参数的关系的特性图中,将另一参数相对于一个参数的变化呈直线地或大致直线地变化的方式称为“线性地变化”。另外,在表示两个参数的关系的特性图中,将另一参数相对于一个参数的变化呈曲线地变化等未呈直线地或大致直线地变化的方式称为“非线性地变化”。
在图10中,对象角度θ相对于相对位置的变化呈曲线地变化。因此,在图10中,对象角度θ相对于相对位置的变化非线性地变化。对象角度θ在与相对位置的可动范围对应的第一可变范围内变化。
在本实施方式中,磁场产生器10构成为:对象磁场MF的方向的变化相对于相对位置的变化的方式为相对于相对位置的变化非线性地变化。换言之,磁场产生器10构成为:对象角度θ的变化相对于相对位置的变化的方式为相对于相对位置的变化非线性地变化。对象角度θ线性地变化还是非线性地变化取决于例如相对位置的可动范围内的第一及第二磁场分量MF1、MF2的强度。第一及第二磁场分量MF1、MF2的强度可以根据磁铁13、31A、34A的位置或特性等进行调整。
磁场产生器10能够构成为例如使对象角度θ基于以下说明的第一线性参数非线性地变化。在此,在由正交的两轴表示透镜5的位置和对象角度θ的正交坐标系中,设表示透镜5的可动范围内的透镜5的位置和对象角度θ的关系的曲线为第一曲线,设连接该第一曲线的两端的线段为第一线段。如上所述,相对位置表示透镜5的位置。在相对位置的可动范围为0~700μm的情况下,图10中带符号73的曲线对应于第一曲线,图10中带符号74的线段对应于第一线段。另外,设与任意的相对位置对应的对象角度θ的值为第一值θ1,设与任意相对位置对应的第一线段上的值为第二值θ2。图10中示出了第一及第二值θ1、θ2的一例。
另外,设对象角度θ的第一可变范围内的对象角度θ的最大值和最小值的差为第三值Δθ。图10中示出了相对位置的可动范围为0~700μm的情况下的第三值Δθ。另外,设第一值θ1和第二值θ2的差相对于第三值Δθ的比例为第一线性参数L1。第一线性参数L1(单位%)由下述式(1)表示。
L1=(θ1-θ2)/Δθ×100…(1)
第一线性参数L1的绝对值越小,则对象角度θ相对于相对位置的变化越呈直线地变化。可以说,如果第一线性参数L1的绝对值小于3%,则对象角度θ相对于相对位置的变化呈直线地或大致直线地变化。因此,在本实施方式中,以使对象角度θ非线性地变化的方式,磁场产生器10即第一及第二磁场产生部11、12优选为以第一线性参数L1的绝对值为3%以上的方式构成,更优选为以第一线性参数L1的绝对值为10%以上的方式构成。在图10所示的例子中,第一线性参数L1的绝对值为11%。
另一方面,当第一线性参数L1的绝对值过大时,对象角度θ的变化量变得比相对位置的变化量大或者比相对位置的变化量小,无法高精度地检测透镜5的位置。为了防止这种情况的发生,磁场产生器10即第一及第二磁场产生部11、12优选以第一线性参数L1的绝对值为100%以下的方式构成。
接下来,对相对位置、对象角度θ及检测信号的关系进行说明。如上所述,MR元件50的电阻值在自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向形成的角度为0°时成为最小值,在该角度为180°时成为最大值。在下文中,在第一电阻部R1中包含的多个MR元件50中的各个中,将自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向即第一方向形成的角度称为相对角度。自由层51的第二磁化的方向根据对象磁场MF的方向变化。因此,相对角度根据对象磁场MF的方向及对象角度θ变化。
第四电阻部R4中包含的多个MR元件50各自的磁化固定层53的第一磁化的方向是与第一电阻部R1中包含的多个MR元件50的各自的磁化固定层53的第一磁化的方向相同的方向(第一方向)。因此,在第四电阻部R4中包含的多个MR元件50中的各个中,自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向形成的角度与相对角度相等或大致相等。
另外,第二电阻部R2中包含的多个MR元件50各自的磁化固定层53的第一磁化的方向是与第一电阻部R1中包含的多个MR元件50的各自的磁化固定层53的第一磁化的方向相反的方向(第二方向)。因此,在第二电阻部R2中包含的多个MR元件50中的各个中,自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向形成的角度与相对角度相差约180°。
另外,第三电阻部R3中包含的多个MR元件50各自的磁化固定层53的第一磁化的方向是与第二电阻部R2中包含的多个MR元件50的各自的磁化固定层53的第一磁化的方向相同的方向(第二方向)。因此,在第三电阻部R3中包含的多个MR元件50中的各个中,自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向形成的角度与相对角度相差约180°。
在本实施方式中,自由层51的第二磁化的方向被设为与对象磁场MF的方向一致。在此,设第一方向相对于X方向形成的角度为第一角度。对象角度θ减去第一角度,求出相对角度。
磁传感器20以例如在相对角度为0°时检测信号为最小值,在相对角度为180°时检测信号为最大值的方式构成。图11是表示相对角度和检测信号的关系的特性图。在图11中,横轴表示相对角度,纵轴表示检测信号。在图11中,以检测信号的最大值为1且检测信号的最小值为-1的方式,将检测信号标准化。
在本实施方式中,检测信号在与对象角度θ的第一可变范围对应的第二可变范围内变化。磁传感器20构成为检测信号的变化相对于相对角度的变化的方式相对于对象磁场MF的方向的变化非线性地变化。在本实施方式中,特别地,磁传感器20构成为检测信号的变化相对于对象磁场MF的方向的变化的方式相对于对象磁场MF的方向的变化非线性地变化。换言之,磁传感器20构成为检测信号的变化相对于对象角度θ的变化的方式相对于对象角度θ的变化非线性地变化。
根据图11可理解,检测信号线性地变化还是非线性地变化取决于相对角度的范围。相对角度的范围取决于对象角度θ的第一可变范围和第一方向相对于X方向形成的第一角度。因此,相对角度的范围可以根据磁化固定层53的第一磁化的方向进行调整。
磁传感器20能够构成为例如使检测信号基于以下说明的第二线性参数非线性地变化。在此,在由正交的两轴表示对象角度θ和检测信号的正交坐标系中,设表示对象角度θ的第一可变范围内的对象角度θ和检测信号的关系的曲线为第二曲线,设连接该第二曲线的两端的线段为第二线段。图12是表示对象角度θ和检测信号的关系的示意图。在图12中,横轴表示对象角度θ,纵轴表示检测信号。另外,在图12中,带符号75的曲线表示第二曲线,带符号76的线段表示第二线段。另外,设与任意对象角度θ对应的检测信号的值为第四值S1,设与任意对象角度θ对应的第二线段上的值为第五值S2。图12中示出了第四及第五值S1、S2的一例。
另外,设检测信号的第二可变范围内的检测信号的最大值和最小值的差为第六值ΔS。另外,设第四值S1和第五值S2的差相对于第六值ΔS的比例为第二线性参数L2。第二线性参数L2(单位%)由下述式(2)表示。
L2=(S1-S2)/ΔS×100…(2)
第二线性参数L2的绝对值越小,则检测信号相对于对象角度θ的变化越呈直线地变化。可以说,如果第二线性参数L2的绝对值小于3%,则检测信号相对于对象角度θ的变化呈直线地或大致直线地变化。因此,在本实施方式中,以使检测信号非线性地变化的方式,磁传感器20即磁化固定层53的第一磁化的方向优选为以第二线性参数L2的绝对值为3%以上的方式构成,更优选为以第二线性参数L2的绝对值为10%以上的方式构成。
另一方面,当第二线性参数L2的绝对值过大时,检测信号的变化量变得比对象角度θ的变化量大或者比对象角度θ的变化量小,无法高精度地检测透镜5的位置。为了防止这种情况的发生,磁传感器20即磁化固定层53的第一磁化的方向优选以第二线性参数L2的绝对值为100%以下的方式构成。
另外,在本实施方式中,特别地,磁传感器20包含多个MR元件50。在该情况下,磁传感器20能够以使检测信号基于相对角度非线性地变化的方式构成。相对角度也可以与第二线性参数L2一同使用,来作为第二线性参数L2的替代。
具体而言,磁传感器20即多个MR元件50的各个构成为透镜5位于可动范围的中央时的相对角度处于0°以上70°以下的范围内、110°以上250°以下的范围内、或290°以上且小于360°的范围内。更优选的是,透镜5位于可动范围的中央时的相对角度在10°以上60°以下的范围内、120°以上170°以下的范围内、190°以上240°以下的范围内、或300°以上350°以下的范围内。根据图12可理解,这些范围是检测信号相对于相对角度的变化非线性地变化的范围。
如上所述,相对角度是第一及第四电阻部R1、R4中包含的多个MR元件50各自的自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向即第一方向形成的角度。在此,将第二及第三电阻部R2、R3中包含的多个MR元件50的各个的自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向即第二方向形成的角度称为第二角度。例如,在透镜5位于可动范围的中央时的相对角度在180°以上250°以下的范围内的情况下,透镜5位于可动范围的中央时的第二角度处于0°以上70°以下的范围内。另外,在透镜5位于可动范围的中央时的相对角度在290°以上且小于360°的范围内的情况下,透镜5位于可动范围的中央时的第二角度处于110°以上180°以下的范围内。
如以上说明的那样,在本实施方式中,磁场产生器10构成为:对象磁场MF的方向的变化相对于透镜5的位置的变化的方式为相对于透镜5的位置的变化非线性地变化,并且磁传感器20构成为:检测信号的变化相对于对象磁场MF的方向的变化的方式为相对于对象磁场MF的方向的变化非线性地变化。由此,根据本实施方式,能够使检测信号相对于透镜5的位置的变化线性地变化。即,根据本实施方式,即使在对象磁场MF的方向相对于透镜5的位置的变化非线性地变化的情况下,也能够使检测信号相对于透镜5的位置的变化线性地变化。
下面,一边与第一比较例的位置检测装置进行比较,一边对本实施方式的位置检测装置1的效果进行说明。首先,对第一比较例的位置检测装置的结构进行说明。第一比较例的位置检测装置的结构基本与本实施方式的位置检测装置1的结构相同。但是,在第一比较例中,透镜5位于可动范围的中央时的相对角度为90°。
接下来,对与本实施方式的位置检测装置1对应的第一实施例的位置检测装置的结构进行说明。第一实施例的位置检测装置的结构基本与本实施方式的位置检测装置1的结构相同。但是,在第一实施例中,透镜5位于可动范围的中央位置时的相对角度为127°。
图13是表示第一比较例的位置检测装置中的第一及第二磁化的方向的说明图。图14是表示第一实施例的位置检测装置中的第一及第二磁化的方向的说明图。图13及图14中示出了第一及第四电阻部R1、R4中包含的多个MR元件50的各个的、第一及第二磁化的方向。在图13及图14中,带记号Mp的箭头表示磁化固定层53的第一磁化的方向(第一方向),带记号Mf的箭头表示自由层51的第二磁化的方向。另外,在图13及图14中,带记号θr的箭头表示与透镜5的可动范围对应的第一磁化的方向的可变范围,带记号Mf的虚线的箭头表示透镜5位于可动范围的中央时的第一磁化的方向。
图15是表示相对位置和相对角度的关系的特性图。在图15中,横轴表示相对位置,纵轴表示相对角度。另外,在图15中,符号77表示第一实施例的相对角度,符号78表示第一比较例的相对角度。在第一比较例和第一实施例中,设相对位置的可动范围为0~700μm的范围。
在此,作为表示检测信号的变化相对于透镜5的位置的变化即相对位置的变化的方式的参数,定义第三线性参数L3。第三线性参数L3的定义基本与参照图12说明的第二线性参数L2的定义相同。当将第二线性参数L2的定义的说明中的对象角度θ及第一可变范围分别置换为相对位置及可动范围时,成为第三线性参数L3的定义的说明。第三线性参数L3的绝对值越小,则检测信号相对于相对位置的变化越呈直线地变化。
图16是表示第一比较例的位置检测装置中的相对位置和检测信号及第三线性参数L3的关系的特性图。图17是表示第一实施例的位置检测装置中的相对位置和检测信号及第三线性参数L3的关系的特性图。在图16及图17中,横轴表示相对位置,左侧的纵轴表示检测信号,右侧的纵轴表示第三线性参数L3。另外,在图16及图17中,实线的曲线表示检测信号,虚线的曲线表示第三线性参数L3。
如图16所示,在第一比较例中,第三线性参数L3的绝对值的最大值为11%。如图17所示,在第一实施例中,第三线性参数L3的绝对值的最大值为3%。根据图16及图17可理解,与第一比较例相比,根据本实施方式,能够使检测信号相对于相对位置的变化即透镜5的位置的变化线性地变化。
接下来,对本实施方式的其它效果进行说明。在本实施方式中,设透镜5位于可动范围的中央时的相对角度为0°以上70°以下的范围内、110°以上250°以下的范围内、或290°以上且小于360°的范围内。另外,在相对角度为0°及其附近的范围、或180°及其附近的范围内,与相对角度的变化量相比,检测信号的变化量变小。与此相对,设相对角度为上述优选范围的任一个,并除去相对角度为0°及其附近的范围、或180°及其附近的范围,从而能够防止与相对角度的变化量相比,检测信号的变化量变小。
另外,在本实施方式中,磁传感器20包含第一及第二电阻器Ro1、Ro2。由此,根据本实施方式,能够减小检测信号的偏移。下面,对于该效果,一边与第二比较例的位置检测装置相比较一边进行说明。首先,对第二比较例的位置检测装置的结构进行说明。第二比较例的位置检测装置具备磁传感器120,作为本实施方式的磁传感器20的替代。图18是表示磁传感器120的结构的电路图。磁传感器120中未设置本实施方式的第一及第二电阻器Ro1、Ro2。第二比较例的位置检测装置的其它结构与本实施方式的位置检测装置1的结构相同。
图19是表示第二比较例的位置检测装置中的相对位置和检测信号的关系的特性图。在图19中,横轴表示相对位置,纵轴表示检测信号。如图19所示,在第二比较例中,与图17所示的第一实施例的检测信号相比,检测信号变小。下面,将透镜5位于可动范围的中央时的检测信号与规定的基准值的偏移称为检测信号的偏移或者简称为偏移。规定的基准值例如为0。图19中示出第二比较例中检测信号的偏移大于第一实施例的检测信号的偏移。
检测信号例如输入至未图示的处理器并实施有规定的处理。未图示的处理器由例如专用集成电路(ASIC)或微型计算机构成,具有将检测信号转换为数字信号的模数转换器(下面记为A/D转换器。)。在未图示的处理器中,预先规定了检测信号的使用范围。使用范围例如为A/D转换器中的正常的输入信号的范围。如图19所示,当检测信号的偏移大时,检测信号的值与第二可变范围内无关,可能成为使用范围的范围外。在该情况下,无法检测透镜5的位置。
如图11所示,在相对角度为90°或270°的情况下,检测信号为0。如上所述,检测信号的偏移变大的原因在于,设透镜5位于可动范围的中央时的相对角度为除90°及270°以外的角度。与此相对,在本实施方式中,通过第一及第二电阻器Ro1、Ro2,调整输出端口E1、E2的各自的电位,使检测信号的偏移变小。由此,根据本实施方式,能够防止检测信号的值成为使用范围的范围外。
[第二实施方式]
接下来,对本发明的第二实施方式进行说明。首先,参照图20对本发明的第二实施方式的旋转致动器的结构进行说明。图20是表示旋转致动器200的俯视图。
本实施方式的旋转致动器200具备本实施方式的位置检测装置201、主体241、以及旋转体242。本实施方式的位置检测装置201为磁式的位置检测装置,是为了检测旋转体242的旋转位置而使用的。主体241包含由例如伺服电机等构成的未图示的驱动装置。未图示的驱动装置使旋转体242以规定的旋转轴C为中心沿旋转方向R旋转。未图示的驱动装置由旋转致动器200的外部的未图示的控制部控制。
与第一实施方式的图6及图7同样,图20中示出了X方向、Y方向、Z方向。在本实施方式中,设平行于旋转轴C且从图20的深处朝向面前的方向为Z方向。在图20中,将X方向表示为朝向右侧的方向,将Y方向表示为朝向上侧的方向。
位置检测装置201具备磁场产生器210、磁传感器220、以及连接部件230。连接部件230连接磁场产生器210和旋转体242。磁场产生器210的位置伴随旋转体242的旋转而以旋转轴C为中心沿旋转方向R变化。磁场产生器210产生磁传感器220应检测的磁场(检测对象磁场)即对象磁场。在本实施方式中,磁场产生器210包含产生对象磁场的磁铁211。
磁传感器220检测基准平面内的检测位置处的对象磁场,生成与对象磁场的方向对应的检测信号。磁传感器220通过未图示的固定部件固定于磁场产生器210的附近。检测位置是磁传感器220检测对象磁场的位置。基准平面是包含检测位置且与Z方向垂直的平面。磁传感器220的结构与第一实施方式的磁传感器20的结构相同。
磁场产生器210以当旋转体242的旋转位置变化时,基准平面内的检测位置处的对象磁场的方向和强度也变化的方式构成。当磁场产生器210的位置伴随旋转体242的旋转位置的变化而变化时,检测位置处的对象磁场的方向和强度也变化,伴随于此,磁传感器220生成的检测信号的值也变化。检测信号的值取决于旋转体242的旋转位置而变化。未图示的控制部通过测定检测信号,检测旋转体242的旋转位置。与第一实施方式的磁传感器20同样,磁传感器220生成与对象磁场的方向相对于基准方向形成的对象角度对应的检测信号。
下面,将旋转体242的旋转位置简称为旋转位置。在本实施方式中,由旋转体242的旋转角度表示旋转位置,设旋转体242位于可动范围的中央时的旋转位置(旋转角度)为0°。另外,对于旋转位置来说,在旋转体242从旋转位置为0°的状态向沿着旋转方向R的一个方向旋转时由正值的角度表示,在旋转体242从旋转位置为0°的状态向沿着旋转方向R的上述一个方向相反的方向旋转时由负值的角度表示。旋转位置的可动范围例如小于90°。
图21是表示旋转位置和对象角度的关系的特性图。在图21中,横轴表示旋转位置,纵轴表示对象角度。在图21中,对象角度相对于旋转位置的变化呈曲线地变化。因此,在图21中,对象角度相对于旋转位置的变化非线性地变化。对象角度在与旋转位置的可动范围对应的第一可变范围内变化。
在本实施方式中,磁场产生器210构成为:对象磁场的方向的变化相对于旋转位置的变化的方式为相对于旋转位置的变化非线性地变化。换言之,磁场产生器210构成为:对象角度的变化相对于旋转位置的变化的方式为相对于旋转位置的变化非线性地变化。对象角度线性地变化还是非线性地变化取决于例如磁场产生器210的磁铁211的磁化的方向或磁场产生器210相对于磁传感器220的位置。
磁场产生器210能够构成为例如使对象角度基于第一实施方式中说明的第一线性参数L1非线性地变化。本实施方式的第一线性参数L1的定义如下。首先,在由正交的两轴表示旋转位置和对象角度的正交坐标系中,设表示旋转位置的可动范围内的旋转位置和对象角度的关系的曲线为第一曲线,设连接该第一曲线的两端的线段为第一线段。另外,设与任意旋转位置对应的对象角度的值为第一值θ1,设与任意旋转位置对应的第一线段上的值为第二值θ2。另外,设对象角度的第一可变范围内的对象角度的最大值和最小值的差为第三值Δθ。另外,设第一值θ1和第二值θ2的差相对于第三值Δθ的比例为对应于第一值θ1的第一线性参数L1。第一线性参数L1由第一实施方式的式(1)表示。
在本实施方式中,磁场产生器210以第一线性参数L1的绝对值处于3%以上100%以下的方式构成。此外,与第一实施方式同样,磁场产生器210优选以第一线性参数L1的绝对值处于10%以上的方式构成。
另外,如第一实施方式中说明的那样,将磁传感器220的第一及第四电阻部R1、R4(参照图7)中包含的多个MR元件50(参照图8)的各自的自由层51的第二磁化的方向相对于磁化固定层53的第一磁化的方向即第一方向形成的角度称为相对角度。与第一实施方式同样,在本实施方式中,自由层51的第二磁化的方向设为与对象磁场MF的方向一致。
磁传感器220构成为:检测信号的变化相对于相对角度的变化的方式为相对于对象磁场的方向的变化非线性地变化。在本实施方式中,特别地,磁传感器220构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。换言之,磁传感器220构成为:检测信号的变化相对于对象角度的变化的方式为相对于对象角度的变化非线性地变化。
如第一实施方式中说明的那样,检测信号线性地变化还是非线性地变化取决于相对角度的范围。相对角度的范围可以根据磁化固定层53的第一磁化的方向进行调整。
磁传感器220能够构成为例如使检测信号基于第一实施方式中说明的第二线性参数L2非线性地变化。本实施方式的第二线性参数L2的定义与第一实施方式相同。在本实施方式中,磁传感器220即磁化固定层53的第一磁化的方向以第二线性参数L2的绝对值处于3%以上100%以下的方式构成。此外,与第一实施方式同样,磁传感器220即磁化固定层53的第一磁化的方向优选以第二线性参数L2的绝对值处于10%以上的方式构成。
另外,在本实施方式中,特别地,磁传感器220包含多个MR元件50。在该情况下,磁传感器220能够构成为使检测信号基于相对角度非线性地变化。相对角度也可以与第二线性参数L2一同使用,作为第二线性参数L2的替代。
具体而言,磁传感器220即多个MR元件50的各个以旋转体242位于旋转位置的可动范围的中央时的相对角度处于0°以上70°以下的范围内、110°以上250°以下的范围内、或290°以上且小于360°的范围内的方式构成。旋转体242位于旋转位置的可动范围的中央时的相对角度更优选在10°以上60°以下的范围内、120°以上170°以下的范围内、190°以上240°以下的范围内、或300°以上350°以下的范围内。
如以上说明的那样,在本实施方式中,磁场产生器210构成为:对象磁场的方向的变化相对于旋转体242的旋转位置的变化的方式为相对于旋转体242的旋转位置的变化非线性地变化,并且磁传感器220构成为:检测信号的变化相对于对象磁场的方向的变化的方式为相对于对象磁场的方向的变化非线性地变化。由此,根据本实施方式,能够使检测信号相对于旋转体242的位置的变化线性地变化。即,根据本实施方式,即使在对象磁场的方向相对于旋转体242的旋转位置的变化非线性地变化的情况下,也能够使检测信号相对于旋转体242的旋转位置的变化线性地变化。
下面,一边与第三比较例的位置检测装置相比较,一边对本实施方式的位置检测装置201的效果进行说明。首先,对第三比较例的位置检测装置的结构进行说明。第三比较例的位置检测装置的结构基本与本实施方式的位置检测装置201的结构相同。但是,在第三比较例中,旋转体242位于可动范围的中央时的相对角度为90°。另外,在第三比较例中,未设置第一及第二电阻器Ro1、Ro2(参照图7)。
接下来,对第二实施例的位置检测装置的结构进行说明。第二实施例的位置检测装置的结构基本与本实施方式的位置检测装置201的结构相同。但是,在第二实施例中,旋转体242位于可动范围的中央时的相对角度为153°。另外,在第二实施例中,未设置第一及第二电阻器Ro1、Ro2(参照图7)。
在本实施方式中,作为表示检测信号的变化相对于旋转位置的变化的方式的参数,使用第一实施方式中说明的第三线性参数L3。第三线性参数L3的定义基本与第一实施方式中说明的第二线性参数L2的定义相同。如果将第二线性参数L2的定义的说明中的对象角度θ及第一可变范围分别置换为旋转位置及可动范围,则成为本实施方式的第三线性参数L3的定义的说明。第三线性参数L3的绝对值越小,则检测信号相对于旋转位置的变化越呈直线地变化。
图22是表示第三比较例的位置检测装置中的旋转位置和检测信号的关系的特性图。图23是表示第二实施例的位置检测装置中的旋转位置和检测信号的关系的特性图。在图22及图23中,横轴表示旋转位置,纵轴表示检测信号。在第三比较例和第二实施例中,设旋转位置的可动范围为-5°~5°的范围。
图24是表示旋转位置和第三线性参数L3的关系的特性图。在图24中,横轴表示旋转位置,纵轴表示第三线性参数L3。另外,在图24中,带符号81的曲线表示第三比较例的第三线性参数L3,带符号82的曲线表示第二实施例的第三线性参数L3。如图24所示,在第三比较例中,第三线性参数L3的绝对值的最大值为13%,在第二实施例中,第三线性参数L3的绝对值的最大值为3%。根据图24可理解,与第三比较例相比,根据本实施方式,能够使检测信号相对于旋转位置的变化线性地变化。
本实施方式的其它结构、作用及效果与第一实施方式同样。
此外,本发明不限于上述各实施方式,可进行各种变更。只要满足权利要求书的要求,磁场产生器10、210及磁传感器20、220的结构就不限于各实施方式所示的例子,可以为任意结构。例如,磁传感器20、220包含电源端口V、接地端口G、第一输出端口E1、第一电阻部R1、第二电阻部R2及第一电阻器Ro1,但也可以为不包含第二输出端口E2、第三电阻部R3、第四电阻部R4及第二电阻器Ro2的结构。在该情况下,检测信号是取决于第一输出端口E1的电位的信号。
另外,第一电阻器Ro1也可以以设置于第一输出端口E1和接地端口G之间的方式与至少一个第二MR元件串联连接。在该情况下,第二电阻器Ro2以设置于电源端口V和第二输出端口E2之间的方式与至少一个第三MR元件串联连接。
基于以上说明可知,可以实施本发明的各种方式或变形例。因此,在权利要求书的等价范围内,也可以以除上述最优方式以外的方式实施本发明。
- 位置检测装置、摄像头模块及旋转致动器
- 模块化旋转式可导向致动器、导向工具、及具有模块化致动器的旋转式可导向钻井系统