种植系统和方法
文献发布时间:2023-06-19 12:14:58
本发明涉及存储系统。更具体地但非排他地,本发明涉及具有堆叠的存储箱或容器的存储系统。
一些商业和工业活动要求可以实现大量不同产品的存储和取回的系统。一种在多条产品线上存储和取回货品的系统已知类型涉及将存储容器或容器堆叠在彼此顶部,并按排布置这些堆垛。从上方访问存储容器或容器,排与排之间不需要通道,能够在给定的空间中存储更多容器。
在下文详细描述的已知存储和取回系统中,容器是被动的,其功能仅为存放货物。虽然给定容器的辨识信息可能已知,并通过例如条形码链接到其内容物,但该系统中的容器没有主动组件或机载智能。
在海运集装箱系统中,容器包括监测和控制系统,容器例如冷藏内容物的容器、包括气体监测系统的容器(例如以监测水果成熟度),以及包括定位装置的容器(以在港口追踪追溯单个容器)。
数十年来,成排堆叠的容器的处理方法已经众所周知。在一些这样的系统中,例如Bertel的US 2701065中所述,其包括按排布置的独立式容器堆垛,来减少与存储这些容器相关联的存储量,但如有所需,仍提供特定容器的访问。对给定容器的访问通过提供相对复杂的起重机构来实现,该起重机构可用于堆叠给定容器和从堆垛移出给定容器。然而这种系统的成本在许多情况下不切实际,且其商业化也主要用于大型海运集装箱的存储和处理。
利用独立式容器堆垛和提供取回和存储特定容器的机构这一理念已经得到进一步发展,例如Cimcorp的EP 0767113 B中所述,‘113公开了一种移出复数个堆叠容器的机构,该机构使用矩形管式的机器人装载处理器,该机器人装载处理器下降至容器堆垛周围且配置为能够在堆垛的任何高度抓取容器。通过这种方式,可以一次从一个堆垛抬升几个容器。可移动管可用于将几个容器从一个堆垛顶部移动至另一个堆垛顶部,或者将容器从堆垛移动至外部位置以及从外部位置移动到堆垛。当单一堆垛中的所有容器均包含相同产品(称为单产品堆垛)时,此类系统尤为有用。
在‘113所述的系统中,管的高度需要至少与最大的容器堆垛一样高,以便单次操作就可提取最高的容器堆垛。相应地,当用于诸如仓库的封闭空间时,堆垛的最大高度受限于容纳装载处理器的管的需要。
EP 1037828 B1(Autostore)描述了一个容器堆垛布置在框架结构内的系统,该申请借引用合并于此。此类型的系统在附图图1至图4中给出了图示。机器人装载处理设备可受控制地在堆垛最上层表面上的轨道系统上在堆垛各处移动。
机器人装载处理设备的其他形式在例如第317366号挪威专利中有进一步描述,该申请借引用合并于此。图3(a)和3(b)分别是装载处理设备从后部和前部看的示意性立体图,图3(c)是正在抬升箱子的装载处理设备的前向示意立体图。
第1314313.6号(Ocado)英国专利申请描述了装载处理设备的进一步发展,其中每一机器人装载处理器仅覆盖一个网格空间,这使得装载处理器的密度能够更高,从而使给定尺寸的系统能具有更高的工作量。
这种已知的存储系统中,大量容器密集地堆叠。容器的内容物可能会降解,可能需要照明、加热或冷却,或者可能需要已知系统目前并未提供的某种形式的监测或控制。
本发明提供了一种存储系统,其包括:第一组平行轨路或轨道和第二组平行轨路或轨道,第二组平行轨路或轨道在大致的水平面上横向延伸至第一组,形成包括复数个网格空间的网格图案;按堆垛布置的复数个存储容器10,位于轨路下方;至少一台装载处理设备,放置在网格上,设为在堆垛上方在轨路上横向移动,装载处理设备包括设为从堆垛抬升一个或多个容器或其部分的抬升设备;其中数个容器包括向该容器或每个容器提供服务的服务装置,借此使得堆垛内的单个容器能执行附加功能。
本发明还提供了一种状态监测存储系统的方法,其包括以下步骤:在存储容器内设置传感器装置和数据记录和存储装置;设置通信装置,以将记录的数据通信至中央数据记录设备;定位存储系统内待监测的容器;以及监测接收的数据。
有利地,根据本发明的一种形式,存储系统内的单个容器可在货物之外还设有服务。另外,存储系统内的单个容器可不含货物,而可含有提供至其他容器,或监测或控制系统状态的服务。
以这种方式,根据单个容器中所设的服务,可控制或监测内容物,以获取与箱子的内容物相关的数据,而该数据将转送至中央处理系统。另外,可控制该容器或容器内的服务或状态,例如温度、湿度、照明或其他参数。控制功能可以由箱内的本地控制系统提供,也可以由向容器中致动器发送信号的中央系统提供。此外,可以在非相邻容器之间借助无线或其他装置来控制和监测点对点通信。传输的数据可提供关于箱的状态、箱的内容物的信息,或者可提供关于相邻容器的信息,以状态监测整个存储系统。另外,以这种方式,可根据箱的特定内容物的需要,加热或冷却容器。
以这种方式,本发明克服了现有技术的问题,提供了提高大型箱处理存储系统的可靠性、降低总成本的系统和方法。
现参考所附示意图描述本发明,其中:
图1是框架结构的示意性立体图,该框架结构在存储系统中安置复数个容器堆垛;
图2为图1中框架结构的部分示意性平面图;
图3(a)和3(b)分别是一种形式的机器人装载处理设备从后部和前部看的示意性立体图,该机器人装载处理设备与图1和图2中的框架结构共同使用,图3(c)是正在使用已知装载处理器设备抬升箱子的示意性立体图;
图4是已知存储系统的示意性立体图,该存储系统包括复数个图3(a)、3(b)和图3(c)所示类型的装载处理器设备,装载处理器设备与根据本发明一种形式的机器人服务设备一起安装于图1和图2中的框架结构。
图5a和图5b是根据本发明的一种容器形式的示意图立体图,图5a显示容器的一侧视图,图5b显示同一容器的相反侧视图,该容器包括通过连接装置连接的服务和实用程序,连接装置借助位于容器至少一侧的路由装置供应;
图6a和图6b是根据本发明的另一种容器形式的示意图立体图,该容器包括照明装置和流体供应装置;
图7a显示了图5a中容器上的连接装置的展开图;
图7b显示了图5b中容器上的路由装置的展开图;
图8a、图8b和图8c是根据本发明的另一种形式的容器的示意图立体图,该容器包括容器或其部分中的照明装置;
图9为图6a和图6b中容器堆垛的示意图立体图,显示当容器堆叠在堆垛中时,容器上的连接器正在协作;
图10是根据本发明的另一种形式的图9中容器堆垛的示意图立体图,容器位于一种形式的存储和取回系统的框架结构内,连接器进一步连接到位于存储和取回系统的底座中的供应装置;
图11是存储和取回系统的底座和堆垛内的底部容器之间的连接的示意性立体图;
图12是根据本发明另一种形式的容器的示意性立体图,容器包括流体供应装置和流体储存器;
图13是本发明另一实施方式的示意图立体图,其中容器包括复数个小型容器,每个小型容器包括给定服务,给定服务可通过位于容器至少一侧的连接装置连接;
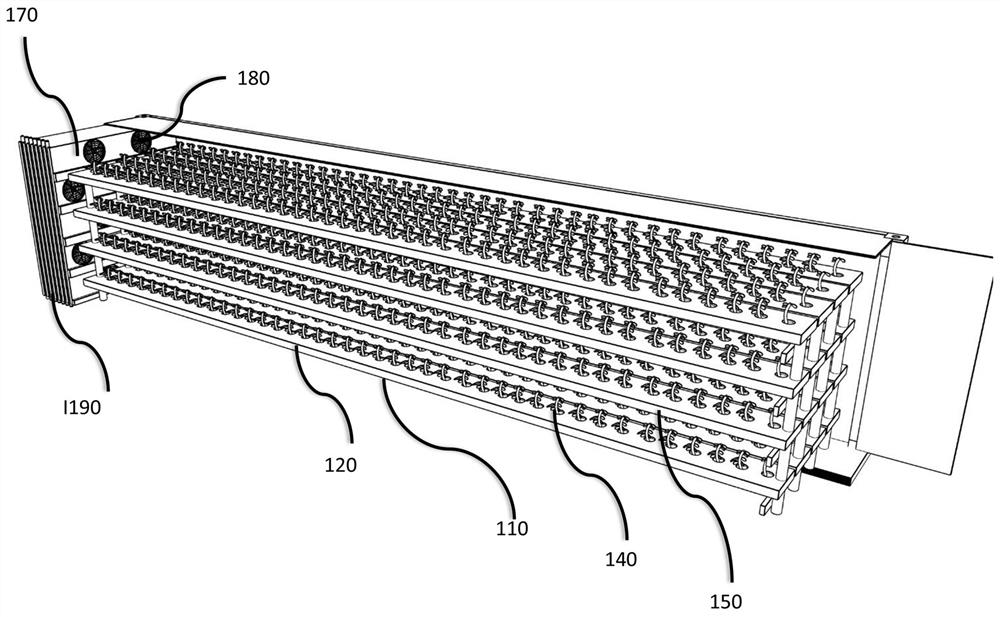
图14是本发明附加实施方式的示意性立体图,其中智能容器用作垂直农场系统的构造块,该系统包括一系列容器,容器的体积由其中存储或种植的生物体的大小界定;
图14a为根据本发明另一实施方式的容器的示意性立体图;
图14b为根据本发明附加实施方式的图14a中容器的示意性立体剖视图,显示种植托盘;
图15为根据图14a和图14b中本发明的容器的示意性立体图,显示密集填装的种植托盘,其内包括生物体;
图16是根据本发明的图14和图15中容器的示意性立体图,示出了根据本发明一种形式的服务区,该服务区包括从图15的密集填装的容器中移出的种植托盘,其位于一种形式的传送器装置或运输装置上。
图17是根据本发明的容器内侧的示意性立体图,示出了根据本发明的一种形式的光照装置,该光照装置包括布置在种植托盘上方的光导端点。
图18是根据本发明的容器内侧的示意性立体图,示出了根据本发明的一种形式的光照装置,该光照装置包括从容器顶部延伸到容器底部的灯管。
如图1和图2所示,可堆叠的容器,也称箱10,相互堆叠在彼此顶部形成堆垛12。堆垛12布置在仓储或制造环境中的框架结构14中。图1为框架结构14的示意性立体图,图2显示布置在框架结构14内的箱10的单堆垛12的俯视图。每一箱10一般安放复数个产物货品(未示出),箱10内的产物货品可能是相同的,或可能有不同产品类型,依应用而定。
框架结构14包括支撑基本上水平的构件18、20的复数个直立构件16。第一组基本上平行且基本上水平的构件18设为与第二组基本上平行且基本上水平的构件20垂直,以形成由直立构件16支撑的复数个水平网格结构。构件16、18、20一般由金属制成。箱10堆叠在框架结构14的构件16、18、20之间,使得框架结构14防止箱10的堆垛12进行水平移动,并引导箱10的垂直移动。
框架结构14的顶层包括轨路22,轨路22以遍及堆垛12顶部的网格图案布置。另外参考图3和图4,轨路22支撑复数个机器人装载处理设备30。第一组22a平行轨路22引导装载处理设备30沿第一方向(X)在框架结构14顶部各处的移动,与第一组22a垂直布置的第二组22b平行轨路22引导装载处理设备30在第二方向(Y)的移动,第二方向(Y)垂直于第一方向(X)。以这种方式,轨路22允许装载处理设备30在X-Y平面内进行二维移动,使得装载处理设备30可以移动到任意堆垛12上方的位置。
每个装载处理设备30包括车辆32,车辆32设为在堆垛12之上、在框架结构14的轨路22上沿X和Y方向行进。第一组轮子34由车辆32前面的一对轮子34和车辆32后面的一对轮子34组成,第一组轮子34设为与第一组22a轨路22的两条相邻轨路接合。相似地,第二组轮子36由在车辆32两侧的两对轮子36组成,第二组轮子36设为与第二组22b轨路22的两条相邻轨路接合。每组轮子34、36可以抬升或下降,使得第一组轮子34或第二组轮子36随时与各自的轨路组22a、22b接合。
当第一组轮子34与第一组轨路22a接合以及第二组轮子36从轨路22抬走时,能够通过安置在车辆32内的驱动机构(未示出)驱动轮子34,来沿X方向移动装载处理设备30。为了沿Y方向移动装载处理设备30,将第一组轮子34从轨路22抬走,将第二组轮子36下降至与第二组轨路22a接合。接着驱动机构可用于驱动第二组轮子36,以实现Y方向上的移动。
以这种方式,一个或多个机器人装载处理设备30能够在中央拣选系统(未示出)的控制下,在框架结构14上的堆垛12的上表面各处移动。每个机器人装载处理设备30均设有从堆垛12抬出一个或多个箱或容器以访问所需产品的装置。以这种方式,能够随时从网格中的多个位置和堆垛访问多件产品。
应理解,如果所需容器10不在堆垛12的顶部,若每个装载处理设备只能携带一个容器10,那么将需要多个装载处理设备协作以访问目标容器10。
图4显示如上文所述的典型存储系统,该系统具有复数个装载处理设备30,其在堆垛12上活动以协作从堆垛12取回容器10或将容器10放回堆垛12。在寻找目标容器10的过程中从堆垛12移出的不需要的容器10被放回到堆垛12的空位置。
图1和图4显示存储系统内堆垛12中的箱10。应理解,在任何给定的存储系统中都可能存在大量箱子,堆垛中可存储多种多样的货物,单一堆垛12中的每个箱子可含有不同的货物,或类似堆垛中可含有类似货物,或单个的容器10中可含有多种库存货品。虽然设想中上述系统在线上购物电子商务解决方案中存储和取回食品杂货,但应理解,其他用途也在展望之中,诸如包裹和信件的其他货品也可存储在容器10中。
图5a和图5b示出了根据本发明的一种形式的容器10,容器10能够通过协作表面在相邻容器10之间形成过盈配合(interference fits)而安放在堆垛中。图5a和图5b中的容器10还包括在协作表面处的连接装置40,容器将在该协作表面协作以形成容器10的堆垛12。图5a和图5b中所示的连接装置40包括位于容器10的顶部边缘处的推入配合插头40。容器的底部边缘包括插座。两个容器通过路由装置链接,路由装置可以作为模具形成容器10的一部分,或者可以是安装在容器10侧面表面上的管道、缆线、电线或其他路由装置。应理解,这种形式的连接装置和路由装置仅是可使用的连接器和路由装置的一种形式,任何合适形式的可释放连接装置,只要能够根据容器移动进出堆垛12的需要而锁定或连接或解锁或断开均可。
例如,连接装置40可包括置于容器10的协作表面上的导电层,或可包括弹簧承载的触点或作为触点的弹簧,或能够在两个或以上个容器10之间传送电能、数据或其他信号的其他连接装置。也可以使用非接触式电能传输方法,例如磁感应或RF感应和光学方法。此外,连接装置40可包括能够在堆垛中的两个或以上个协作容器10之间传送信号或数据的载碳橡胶触点。
虽然容器可以通过过盈装置或通过具有成形的协作表面的相邻容器10来安放在堆垛12中,但容器10也可以借助合适的锁定装置(未示出)锁定在一起。锁定装置可用于在堆垛12中将两个或以上个容器10可释放地锁定在一起。锁定装置必须能够进行远程操作,以便装载处理装置可提升单个的容器10或锁定在一起的复数个容器10。可以使用任何形式的远程锁定和解锁装置,例如电磁锁定装置或任何其他适合执行该功能的装置。
图5a和图5b进一步示出了包括电源装置42的单个箱10,用于向例如图6a和图6b中的加热装置56、冷却装置58、数据记录装置44、通信装置46和/或照明装置60供电。箱10还包括功率控制装置43,用于控制供应至该服务或每项服务的功率,如果要向堆垛12中的相邻容器10传输电能时,还控制供应至堆垛12中的其他容器10的功率。应理解,容器10包括功率控制装置,该控制装置可为加热器56、冷却器58、灯60或任何其他需要电能的服务供电。需要电能的任何元件都可利用电源装置42。电源装置可包括电池或其他装置,该装置通过容器10上的连接装置52从存储系统的底座或经由网格的立柱16传输来自外部电源的电能装置。
另外,电能、数据或任何其他信号可以通过位于仓库地面的电能和/或数据连接器供应至堆垛12中的容器10。电能可以经由容器10的协作表面中的连接装置52向堆垛12上部传输。此外,服务可以从地面沿容器10的堆垛12向上流动,例如可采用这种方式来利用冷却或加热流体。
图5a和图5b进一步示出了至少包括数据记录装置44和通信装置46的单个箱10,用于传输记录到远程中央数据记录设备的数据。数据记录装置44包括适于监测箱10中例如温度、任何气体排放(例如由水果腐烂导致)、湿度的状态的传感器。数据记录装置44和通信装置46实现了对单个容器10的内容物和状态的监测。
另外,对关于系统中堆垛12中特定容器10的信息的了解使得监测存储系统整体的状态成为可能。虽然容器10本身可以是匿名的,但是可以为存储系统中每个箱10分配唯一的辨识信息。以这种方式,每个箱体10(及其内容物)的位置可由系统通过通信装置追踪和识别。以这种方式,由于每个容器10知道紧邻容器10的辨识信息,任意堆垛中底部容器10获知其下方没有容器10,所以可以构建容器10的拓扑。
应理解,可以使用任何通信类型和方法,例如WiFi、蓝牙、3线串行、SigFox或其他专有系统,例如Ocado Innovation Limited的英国专利申请第GB1509793.4号中描述的系统,该申请的内容借引用并入于此。应理解,可采用任意其他合适的通信装置或协议。
图5a和图5b进一步示出了堆垛12中的单个箱10,箱10包括加热装置56和/或冷却装置58,以及用于监测箱10中的温度的温度监测装置50。加热装置56可包括经由直接装置(例如热空气)或间接装置(例如散热器装置)的热流体流,或可进一步包括电加热器或电磁感应加热器。
冷却装置58可包括帕尔贴(Peltier)冷却器,或可包括通过直接装置(例如冷空气)或间接装置(例如散热器装置)的冷流体流包括驱动的冰浆压缩机。
以这些方式,可以根据单个箱10的内容物来监测、控制和改变单个容器10的温度。如果箱子的内容物需要冷藏或冷冻,那么可以将单个箱保持在5摄氏度的温度下用于冷藏,或保持在更低的温度下用于冷冻,而不需要用空间加热器和冷却器将存储系统中堆垛12的部分保持在预定温度下。
应理解,这些仅为示例,可采用任意合适形式的加热器或冷藏器来实现期望效果。容器10可被设计和设置为每个箱10都由位置在其上方的箱10以例如气密的方式密封。每个堆垛12中的顶部箱10可设有盖子(未示出),以密封顶部箱10。以这种方式密封容器10能够通过合适的加热或冷却装置更容易地控制单个箱内的温度。
图6a和图6b示出了包括照明装置60和流体供应装置72的容器10的替代形式。相同的连接器40和17可用于将电能按路线输送至照明装置60,或将水按路线输送至例如流体供应装置72。
图7a和图7b示出了位于容器10侧面上或内部的插头40和插座17的展开图。图7a和图7b详细示出了容器10的连接装置的仅一个示例,该连接装置可形成堆垛12中的相邻容器10之间的连接。
图8示出了堆垛12中单个箱10的三个示例,箱10包括照明装置。照明装置60可设在箱的底座中,以照亮下方的箱10。或者,照明装置60可以包括盖子62,盖子62含有合适的灯泡、LED或任意其他合适的照明形式。盖子62可拆卸地附接至箱10,在从堆垛12移出箱10时折叠。又通过位于容器10上的连接装置40和17向照明装置60供电。
图9显示了图8所示的容器10堆垛。容器10包括流体供应装置和照明装置60。连接器40和17一起协作以将每个容器10与其上、其下的容器连接起来。以这种方式,诸如为照明装置60供电的电能或灌溉单个容器10的内容物的水的服务,可以通过堆垛12中的容器按路线发送。
图10示出了存储系统的框架结构的一部分,包括位于其中的复数个容器,容器10通过电线、缆线或管道或任何其他合适的装置17穿过系统向上运送服务。从图10中可以更详细地看出,堆垛12中的底部容器10通过连接器72连接到通过存储系统底座的供应装置。应理解,底座中的供应装置可以如图10所示位于系统的假底座76中,但是也可采用其他方式将其路线设在包括存储系统的建筑物地面下或借助其他方式设置。
图11更详细地示出了容器堆垛12和系统底座76中的供应装置之间的连接装置。应理解,这仅是合适的连接装置的一个示例,将容器10可释放地连接到电能、电气、照明、电信或其他供应的任何连接器系统均可在设想之中。
图12示出了根据本发明的堆垛12中的单个容器10的又一种形式,箱10包括流体供应装置72,还包括流体储存器74。箱10的内容物可能需要水的供应。相应地,箱10设有可以填充液体或气体的储存器54。为了填充储存器74,可以通过机器人装载处理设备将箱10从堆垛12中移出,将其置于系统中可以根据需要加满储存器的位置。或者,所需的流体可以经由网格系统的立柱16引流至特定的容器10。
图13示出了本发明的另一个实施方式,其中容器100包括复数个小型容器110,每个小型容器110包括可通过位于容器的至少一侧的连接装置17、40连接的特定服务。
在使用中,上文参照附图描述的存储系统包括按堆垛12布置的大量容器10。在本发明的一个实施方式中,存储系统包括分散在系统内的不同类别的容器10。例如,可能有空容器10、含有待存储货物的容器10、含有诸如电源或通信装置的服务的容器、能够加热的容器10、能够冷却的容器 10、包括需要液体和/或光照的货物的容器10。应理解,一些或所有容器10可含有一种或多种上述服务或设备。例如,带有储存器54的箱10还可设有照明装置60。
在堆垛12内的容器10中提供数据记录和状态监测装置,可生成系统的状态和拓扑结构示意图,否则仅在特定容器10移出和检查后才可能得出所述示意图。此外,在数个容器10内包括摄像装置,允许容器在系统各处移动,以检查网格和或其他容器或容器10的状态。
此外,通过立柱16或通过箱与箱的触点向特定单个容器10提供服务,使得具有不同要求的货物能够存储在同一存储系统中,而无需将系统分区,将具有不同要求的货物分到网格的不同部分。
此外,容器10之间的连接以及容器10与堆垛12之间的通信实时生成存储系统的知识库,可在电力故障时骑到协助作用,例如在可能发生的故障恢复中提供帮助。另一种方法是清空所有容器并重建堆垛,这种方法低效且成本昂贵。
上述系统具有多种用途。上文的描述详述了可用于以下某些情况的特定控制和监视服务。根据本发明的方面,智能箱或容器10系统的应用的一些非限制性示例可包括但不限于以下:
包括温度感测装置的容器10可用于监测存储系统的冷藏、冷冻或环境部分的温度。例如,系统的室温部中的温度升高可能导致巧克力融化或可燃物着火。这一问题可能会在气候温暖的夏季中特别突出。
包括摄像装置的容器10可用于监测网格和堆垛12中其他容器10的状态。机器人装载处理设备30可用于在存储系统各处移动容器10,以根据需要检查系统的部分或其他容器10或堆垛12。如果系统中出现溢出,或系统、网格或容器的完整性存在其他问题,这可能是有价值的。
每一单个容器10内的容器10识别装置连同容器10或堆垛12之间的通信装置可用于创建存储系统的拓扑简档,其中可能有点对点辨识信息。在控制堆垛的系统发生严重故障的情况下,拓扑信息可用于创建故障恢复情境。
单个容器10可设有照明装置60,其与监测和摄像装置连同使用,以帮助检查单个容器10或系统整体。另外,容器10的内容物可能受益于特定波长或一定范围的波长的灯光。例如,可以使用适当的灯光来使未成熟水果变成熟。此外,可以将容器或容器10用于栽培用途。
储存容器和容器10可设有传感器,以检测气体、烟雾、火或热,传感器激活洒水器系统以扑灭火灾。
如果存储系统用于,例如在机械化停车场中存储汽车,如英国专利申请第GB1514428.0号中所述(其内容借引用并入于此),检测到火灾或烟雾的传感器可激活洒水器,可设置通信装置来与中央监测系统或紧急服务直接通信。
包括气体感测装置的容器10可用于监测系统的冷藏部内的水果状况。水果成熟会释放气体,因此监测这些特定气体可以提供储存了过度成熟水果的提示。如果检测到这一点,可冷却箱内具有冷却装置的容器10,以防止内容物过度成熟。
如果容器或容器10用于存储如包裹的其他货物,则容器或容器10可含有如称的称重装置,以在继续分送之前监测存储的包裹的重量。
在本发明的第二实施方式中,本文所述的容器可以描述任何体积的容器,包括但不限于从0.6×0.4×0.3立方米的容器到海运集装箱尺寸的容器。
如图14-16所示,在本发明的上述另一个实施方式中,每个容器包括一系列搁板120或其他合适的托盘110。托盘110包括植物140或其他生物体。托盘110位于该容器或每个容器内,并限定种植室100。种植室100可例如包括海运集装箱,其内具有合适的内衬以及可移动的搁板120。搁板120用于支撑托盘110,托盘110中有合适的种植培养基。种植培养基可包括例如土壤或水或种植凝胶或膨胀粘土卵石或任何其他用于支持植物或生物体发育或生长的合适装置。
种植室100具有门130,当其关闭时,门130基本上密封种植室,从而创建可控的环境。在种植室100内,在每个托盘110上方设置照明装置150。例如,照明装置150可设在每个搁板或支撑结构120的底部,以照亮其下方的托盘110。借助支撑结构120本身,例如通过支撑框架160,来向每层搁板提供服务。
种植系统包括这种容器的堆垛,每个堆垛包括一系列容器,每个容器由其下方的容器支撑。定位销105可以布置在容器或种植室100的每个底角,且在容器或种植室100的每个顶角布置协作凹槽,以确保容器在堆叠时恰当排列。
种植系统还包括在容器堆垛上方工作的至少一台装载处理设备。该装载处理设备或每个装载处理设备可包括如欧洲专利第EP3030504 B1号中描述的机器人装载处理设备,该专利借引用并入本文。如果使用此类装载处理设备,立柱和轨道的框架就可以包住容器堆垛。轨道包括如上文参考本发明前述实施方式所述的轨道,容器的自支撑堆垛位于轨道网络的网格空间下方,这种容器堆垛的截面面积不超出容器堆垛上方的轨道网络中网格空间的截面面积。
在一些实施方式中,该或每个装载处理设备包括龙门起重机,该龙门起重机具有抬升设备或任何其他适合将装载处理设备可释放地附接到容器堆垛中的至少一个目标容器或其部分的设备。
堆垛内的该容器或每个容器可包括适合种植或培育其中所含生物体的服务。例如,如果种植托盘或种植培养基中的生物体包括植物,则向该容器供应的服务可包括但不限于空气、或水、或营养物、或光,或这种植物可能合理需要的任何其他服务。如果该生长机制用于支持另一种生物体,应当理解,可以根据需要向其提供任何其他服务。
例如,种植室100还设有环境管理和水处理部分170。环境管理和水处理部分170可包括例如风扇的气流管理系统180,以减少霉菌在种植室100中积聚的风险。环境管理和水处理部分170还可包括室间连接190,使得服务可以从一个种植室100传递到相邻的种植室100。
在使用中,通过在该装载处理设备或每个装载处理设备内,或与该装载处理设备或每个装载处理设备相关联的抬升设备,从预定的容器堆垛中抬升预定的目标容器。应理解,通过装载处理设备从容器堆垛中可释放地抬升目标容器的方法众多。这种抬升装置可以包括抓握机构或任何其他合适形式的附接机构。
一旦被抬升,目标容器就被装载处理设备运送到服务区,在该服务区中可以访问容器内的生物体。在服务区,借助任何合适的装置将植物或其他生物体从位于容器内的种植室100中移出。应理解,从所述容器100移出搁架120或种植托盘110的方法众多,但此类机构可包括但不限于传送器系统、机械抬升系统、叉车或本领域技术人员可用的众多装置中任意一种。这种系统的一个示例在图16中图示,其示出了已经从种植室100中移出的种植托盘110。在导轨125和种植托盘运输器或传送器135就位的情况下,种植托盘运输器135可以借助运输器升降机145升高到待移出的特定种植托盘110的恰当层。运输升降机145确保运输器135的高度可调节,以与室100内的每一层对齐。种植托盘110可以通过可释放机构115从种植室100释放,然后通过传送器135从种植室100中移出。当种植托盘110保留在种植室100中时,可释放机构115可确保种植托盘110在支撑件120上的室100内保持在正确位置上。
一旦从容器移出,可通过装载处理设备将容器放回堆垛中。或者,可用相同或替代的生物体重新补充或重新填充容器,用于种植或繁殖。应理解,可用相同或不同的生物体重新补充容器。如果不同的生物体位于容器的种植室100内,应理解,服务的组合或服务本身可能与之前的设置不同。
应理解,容器、或种植托盘或种植培养基可以更新或更换。另外,可对容器进行适当灭菌或清洁。
在服务区,应理解,可以对生物体进行任何形式的操作。这些操作可能包括但不限于收获、修剪、授粉、移植、重新间隔、种植或容器内所含特定生物体需要的任何其他类似操作。
在上文所述的本发明的实施方式中,设置照明装置以便为生物体生长提供光。如图17-19所示,容器或种植室中的光照装置可通过光导(light-guide)或光管提供。在这种布置中,设置了主光源,该主光源可能是容器的环境管理部分170中的LED光源,或者也可以位于容器外部。来自光源的光通过支撑结构传输到种植托盘110上方的位置。
在图17中,光通过光导205传输到端点210。光导205可内衬反光材料,以便沿光导205反射光。此外,光导可以覆盖非反射材料,以便通过全内反射传输尽可能多的光。光导205沿容器的长度设置,以确保光可以传输到容器的基本所有表面。在端点210,光导205是透明的或半透明的,以允许光离开光导205。端点210的形状可以设为帮助光在所需区域上的均匀分布,例如灯泡形。端点210沿光导205的长度设置,以确保容器各处的种植托盘接收到均匀分布的光。
在图18中,光从光源通过光导205传输,方式类似于图17中的布置。在端点210,光管215,不是灯泡,从光导205延伸到容器的底部。光能够沿着光管传输,但也可沿光管的长度离开光管215,从而在容器内不同高度层提供光,降低容器中其他物品可能在生物体的某些部分产生阴影的风险,例如在植物的茂密枝叶中。
图19所示的容器100有端点210和光管215,通过大致水平的光导205向该容器100提供光,照亮其中的作物,另外,基本上垂直布置的光导205将光传输到下方相邻的容器。
应理解,光源可远离种植区,这是因为光源产生的热量将从种植区消散到其他地方,光源可远离种植区可能有助于种植区的温度管理,借此减少对冷却的需要。此外应理解,例如当容器如本文所述按堆垛布置时,光可以通过桥接光导在容器之间向下或向上传输,或者光可以通过交互种植室服务连接(inter-growth chamber service-connections)190在堆垛之间传输。此外应理解,光源所需的光强度将取决于需要光在系统中传输的距离。此外应理解,因为对多种光源的需求减少,与图17和图18相关描述的照明装置的提供成本相对低廉。光源甚至可以是来自太阳的日光。此外,光导和光管可以由廉价且容易获得的材料制成,如充满透光液体的塑料管。另外,光导和光管可按任意方向布置,以将光按路线发送到需要光的地方。
在上述本发明的实施方式中,或作为本发明的另一实施方式,容器10包括智能装置,如路由器、计算器或服务器(未示出)。智能装置可以通过点对点通信来跨系统中的容器10通信。此外,通信可以借助非接触式光通过空中通信进行,但是可以使用任何其他合适的通信装置。
智能装置可由适当的电源装置和功率控制装置供电和控制,如上文所述的装置。
利用容器10的接近,提供了容器10内智能装置之间通信距离相对较短的系统。相对较短的距离减少了智能装置之间的延迟,系统能够快速有力地运行。
这种系统可能需要广泛的冷却。这种冷却装置按如上所述设置,或设置为从系统底座沿框架结构14的立柱16向上传递的冷却装置。
在使用中,每个计算器或服务器可以通过光信道与其至少六个邻居连接。例如,使用轻微透明的镜子,每个计算器都可在不干扰任何其他流量的情况下传输或接收到该信道中,例如,使用波分多路复用。以这种方式,每个节点都可具有光速、精确定义的延迟、至系统中的每一其他节点的连接。
例如,通信装置可包括基于激光的空气传输。然而也可以提供其他通信装置,例如通过延伸以与邻居接触的光纤触手来连接服务器或计算器。
例如,对于100000个容器10,每个容器10包括强大的智能装置,可将这100000个容器10在14k平方英尺的空间中按60x60、28高的堆垛组合到机器中。或者将100万个容器在125000平方英尺的建筑物中按200x160网格、33高布置。
应理解,众多应用均可从这种即时和界定的节点到节点连接中受益。例如,用于飞机设计、天气预报或气候模型、金融交易计算、蛋白质合成计算,以及与整个有机体的模拟化学反应的流动模拟等,均可有利地受益于这种大型且密集填装的智能装置。然而应理解,这些例子仅作示例,不作限制。
还应理解,可向单个容器提供一种服务、选中的服务或所有所述服务。此外,所列服务不应被视为具有限制性。能够被传送或传输到箱10的任何形式服务均在设想之中。
此外,虽然上述的和附图所示的本发明实施方式详细解释了其中容器10均具有基本相同的尺寸和形状的系统,但应理解,情况并非必须如此。如在申请日为2015年4月15日的英国专利申请第GB1506364.7号(该申请借引用并入本文)中所述,应理解,此类系统可被配置为通过使用能够抬升和移动多种尺寸的容器10的不同尺寸的装载处理设备30,来处理多种尺寸的容器10。
此外,上述的和附图中详述的实施方式假设,存储系统包括以不受约束的方式按堆垛12放置在框架结构14内的容器10。应理解,可以通过合适的分割装置将系统分割成由例如温度界定的更小的子部分。以这种方式,系统就可能具有例如室温部分、冷藏部分和冷冻部分。还应理解,分割可具有额外的优势,例如,分割使得存储系统的部分之间能够相互隔离。例如如果发生火灾,在给定区域使用灭火剂装置来灭火,这时分割可能是必要的。此外,在系统用于其他用途的情况下,系统的不同部分具有不同的气态空气可能具有优势。这可以通过分割系统来实现。应理解,分割装置可以是临时的,且可远程部署,例如是放置在网格下方的卷闸门。
应理解,容器堆垛内任意数量个容器可包括相同或相似的生物体或作物。另外,整个存储系统内的每个容器可以包括不同的作物或生物体。以此方式,种植系统可用于平行实验,其中每个种植室包括可变但预定的种植参数。
还应理解,如上所述,该容器或每个容器可包括用于检测该容器或每个容器内的环境的传感器装置。另外,容器或种植室内的所述环境可以由所述传感器装置监测,由传感器装置生成的数据被监测和记录,使得种植系统操作员能够根据预定参数组移出或更换生物体。
还应理解,种植系统的服务区可以邻接或邻近如上文参考其他实施方式所述的存储系统。在该特定实施方式中,前述类型的装载处理设备可用于在该种植系统和该存储系统之间,转移位于该系统内的容器、种植托盘或任何其他容器。WO 2016/166294 A1(Ocado)中描述了一种形式的可拆卸机构,该申请借引用并入于此。
在不脱离所附权利要求书所限定的本发明范围的情况下,可进行上文未明确描述的诸多变更和修改。