自动导引运输车及其行走轮组
文献发布时间:2023-06-19 13:48:08
技术领域
本发明总体来说涉及自动导引运输车技术领域,具体而言,涉及一种行走轮组,以及包括该行走轮组的自动导引运输车。
背景技术
相关技术中的小车(例如自动导引运输车(Automated Guided Vehicle,AGV))通常借助行走轮与地面接触的方式行走,从而实现物品的运输。当地面出现凹坑或凸起时,小车的驱动轮在凹坑或凸起处可能会悬空,导致驱动轮与地面的正压力缺失,造成小车的运动不可控。
发明内容
本发明实施例的自动导引运输车及其行走轮组,能够有效解决行驶在地面不平的路况时,车轮出现悬空造成运动不可控的问题。
本发明实施例的行走轮组,包括安装件、第一车轮组件、第二车轮组件和摆动组件,第一车轮组件可活动地连接于所述安装件;第二车轮组件可活动地连接于所述安装件;摆动组件铰接于所述安装件,并能够绕铰接点摆动;所述摆动组件的一端铰接于所述第一车轮组件,所述摆动组件的另一端铰接于所述第二车轮组件;当所述第一车轮组件和所述第二车轮组件的其中之一相对于所述安装件活动时,所述摆动组件摆动,使得所述第一车轮组件和所述第二车轮组件的其中另一随动,以使所述第一车轮组件和所述第二车轮组件均与地面接触。
在其中一些实施方式中,所述第一车轮组件沿一竖直方向可移动地连接于所述安装件,所述第二车轮组件沿所述竖直方向可移动地连接于所述安装件;
当所述摆动组件摆动时,所述第一车轮组件和所述第二车轮组件沿所述竖直方向的运动方向相反。
在其中一些实施方式中,所述摆动组件包括摆动件、第一连杆和第二连杆,所述摆动件铰接于所述安装件,所述摆动件的一端铰接于所述第一连杆的一端,所述摆动件的另一端铰接于所述第二连杆的一端;
所述第一连杆的另一端铰接于所述第一车轮组件,所述第二连杆的另一端铰接于所述第二车轮组件。
在其中一些实施方式中,所述第一连杆与所述第二连杆的长度相同;
所述摆动件与所述安装件形成第一铰接点,所述摆动件与所述第一连杆形成第二铰接点,所述摆动件与所述第二连杆形成第三铰接点,所述第一铰接点与所述第二铰接点之间的距离等于所述第一铰接点与所述第三铰接点之间的距离。
在其中一些实施方式中,所述摆动组件绕铰接点摆动时,所述第一车轮组件和所述第二车轮组件的移动距离相等。
在其中一些实施方式中,还包括第一导向轴和第二导向轴;
所述安装件具有第一导向孔和第二导向孔;
所述第一车轮组件具有第一穿孔,所述第二车轮组件具有第二穿孔;
所述第一导向轴穿设于所述第一导向孔和所述第一穿孔,以引导所述第一车轮组件沿所述竖直方向移动;
所述第二导向轴穿设于所述第二导向孔和所述第二穿孔,以引导所述第二车轮组件沿所述竖直方向移动。
在其中一些实施方式中,所述第一车轮组件包括:
第一安装部,可移动地连接于所述安装件,所述摆动组件的一端铰接于所述第一安装部;
第一轮部,可转动地连接于所述第一安装部;以及
第一弹性元件,设于所述第一安装部和所述安装件之间,并能够提供一弹力,使得所述第一安装部沿所述竖直方向具有远离所述安装件的趋势。
在其中一些实施方式中,所述安装件具有第一通孔;
所述第一车轮组件还包括第一抵压件,所述第一抵压件包括第一杆部和第一帽部,所述第一弹性元件套设于所述第一杆部的外部;
所述第一安装部具有第一凹槽,所述第一杆部和所述第一弹性元件穿设于所述第一通孔,所述第一杆部和所述第一弹性元件的一端设于所述第一凹槽内,所述第一帽部设于所述第一杆部的另一端,且连接于所述安装件;
所述第一弹性元件的两端分别抵顶于所述第一凹槽的底壁和所述第一帽部。
在其中一些实施方式中,所述第一轮部为万向轮。
在其中一些实施方式中,所述第二车轮组件包括:
第二安装部,可移动地连接于所述安装件,所述摆动组件的另一端铰接于所述第二安装部;
第二轮部,可转动地连接于所述第二安装部;以及
第二弹性元件,设于所述第二安装部和所述安装件之间,并能够提供一弹力,使得所述第二安装部沿所述竖直方向具有远离所述安装件的趋势。
在其中一些实施方式中,所述安装件具有第二通孔;
所述第二车轮组件还包括第二抵压件,所述第二抵压件包括第二杆部和第二帽部,所述第二弹性元件套设于所述第二杆部的外部;
所述第二安装部具有第二凹槽,所述第二杆部和所述第二弹性元件穿设于所述第二通孔,所述第二杆部和所述第二弹性元件的一端设于所述第二凹槽内,所述第二帽部设于所述第二杆部的另一端,且连接于所述安装件;
所述第二弹性元件的两端分别抵顶于所述第二凹槽的底壁和所述第二帽部。
在其中一些实施方式中,所述第二轮部为舵轮。
在其中一些实施方式中,所述安装件包括安装板和铰接架,所述安装板能够安装一车体的底部,所述铰接架连接于所述安装板,并与所述摆动组件相铰接。
本发明实施例的自动导引运输车,包括车体和如上述任一项所述的行走轮组,所述行走轮组安装于所述车体。
上述发明中的一个实施例具有如下优点或有益效果:
本发明实施例的行走轮组行走在不平整地面时,第一车轮组件和第二车轮组件其中之一可能会悬空,使得第一车轮组件和第二车轮组件的其中另一相对于该被悬空的车轮升高。当该升高的车轮组件活动时,通过摆动组件的作用,该被悬空的车轮组件会随动,直至第一车轮组件和第二车轮组件均与地面接触为止。通过上述的设计,使得本发明实施例的行走轮组不会出现驱动打滑现象,解决了由于车轮悬空造成的运动不可控的问题。
附图说明
通过参照附图详细描述其示例实施方式,本发明的上述和其它特征及优点将变得更加明显。
图1示出的是本发明一实施例的行走轮组的结构示意图。
图2示出的是本发明一实施例的行走轮组的爆炸图。
图3示出的是图2中A处的局部放大图。
图4示出的是本发明一实施例的行走轮组的机构原理图。
图5示出的是本发明一实施例的行走轮组处于平整地面时的示意图。
图6示出的是本发明一实施例的行走轮组处于不平整地面时的示意图。
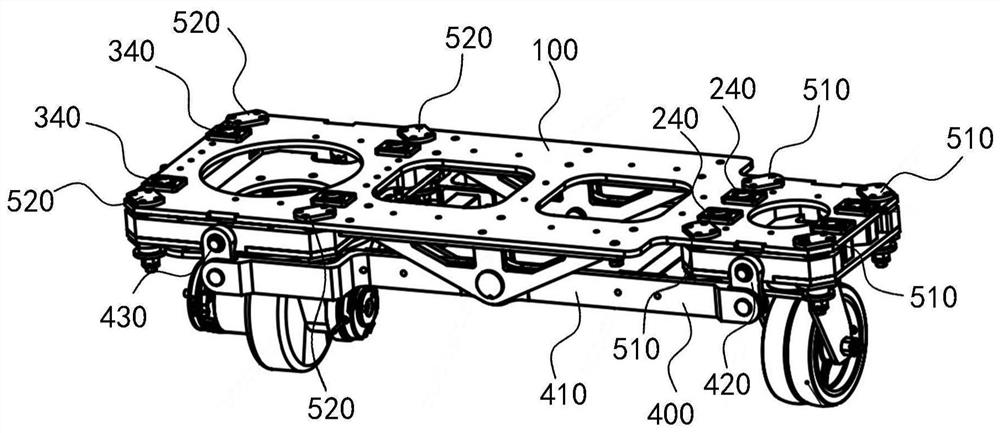
图7示出的是本发明一实施例的自动导引运输车的一个视角的结构示意图。
图8示出的是本发明一实施例的自动导引运输车的另一个视角的结构示意图。
图9示出的是本发明一实施例的自动导引运输车行驶在不平整路面时行走轮组的工作原理图。
其中,附图标记说明如下:
100、安装件
110、安装板
111、第一导向孔
112、第二导向孔
113、第一通孔
114、第二通孔
120、铰接架
200、第一车轮组件
210、第一安装部
220、第一轮部
240、第一抵压件
300、第二车轮组件
310、第二安装部
311、第二穿孔
312、第二凹槽
320、第二轮部
330、第二弹性元件
340、第二抵压件
341、第二杆部
342、第二帽部
400、摆动组件
410、摆动件
420、第一连杆
430、第二连杆
510、第一导向轴
520、第二导向轴
700、车体
具体实施方式
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。图中相同的附图标记表示相同或类似的结构,因而将省略它们的详细描述。
如图1和图2所示,图1示出的是本发明一实施例的行走轮组的结构示意图,图2示出的是本发明一实施例的行走轮组的爆炸图。本发明实施例的行走轮组可以安装在一车体700的底部,以驱动车体700运动,从而实现物品的运输。举例来说,本发明实施例的行走轮组可以应用于一自动导引运输车。当然,可以理解的是,本发明实施例的行走轮组还可以应用于其他设备,此处不再一一列举。
本发明实施例的行走轮组包括安装件100、第一车轮组件200、第二车轮组件300和摆动组件400。安装件100能够安装在一车体700的底部,第一车轮组件200可活动地连接于所述安装件100,第二车轮组件300可活动地连接于所述安装件100,摆动组件400铰接于所述安装件100,并能够绕铰接点摆动,所述摆动组件400的一端铰接于所述第一车轮组件200,所述摆动组件400的另一端铰接于所述第二车轮组件300。
如图2所示,本发明实施例的安装件100包括安装板110和两个铰接架120。安装板110的一侧能够安装一车体700的底部,例如通过螺栓组件。两个铰接架120相对设置,且连接于安装板110的另一侧。每个铰接架120可以大致呈一三角形,以提高铰接架120的结构强度。
安装板110可以大致呈一矩形,安装板110的两端部用于分别连接第一车轮组件200和第二车轮组件300,两个铰接架120连接于安装板110的中间区域。
安装板110的一端部开设有第一导向孔111和第一通孔113。第一导向孔111用于供第一导向轴510穿设其中,以导引第一车轮组件200沿一竖直方向移动。第一通孔113用于供第一抵压件240和第一弹性元件穿设其中,以给第一车轮组件200提供弹性力,使得第一车轮组件200具有远离安装板110的趋势。
在一实施方式中,第一导向孔111的数量可以为四个,均匀设置在安装板110的一端部的四周。第一通孔113的数量也可以为四个,且均匀设置。四个第一导向孔111均匀设置,一方面可以引导第一车轮组件200仅能够沿着竖直方向运动,防止因摆动组件400的摆动,导致第一车轮组件200相对于竖直方向倾斜;另一方面,四个第一导向孔111可使第一车轮组件200沿着竖直方向运动时更稳定。
同理,四个第一通孔113可共四个弹性元件穿设其中,使弹性元件提供给第一车轮组件200的弹性力更加稳定。
当然,可以理解的是,上述第一导向孔111和第一通孔113的数量并非限定为四个,还可以为其他数量,本发明对此不作特别限定,保证能够稳定引导第一车轮组件200和提供弹性力即可。
安装板110的另一端部设有第二导向孔112和第二通孔114。第二导向孔112用于供第二导向轴520穿设其中,以导引第二车轮组件300沿一竖直方向移动。第二通孔114用于供第二抵压件340和第二弹性元件330穿设其中,以给第二车轮组件300提供弹性力,使得第二车轮组件300具有远离安装板110的趋势。
在一实施方式中,第二导向孔112的数量可以为四个,均匀设置在安装板110的另一端部的四周。第二通孔114的数量也可以为四个,且均匀设置。四个第二导向孔112均匀设置,一方面可以引导第二车轮组件300仅能够沿着竖直方向运动,防止因摆动组件400的摆动,导致第二车轮组件300相对于竖直方向倾斜;另一方面,四个第二导向孔112可使第二车轮组件300沿着竖直方向运动时更稳定。
同理,四个第二通孔114可与四个第二弹性元件对应设置,使第二弹性元件提供给第二车轮组件300的弹性力更加稳定。
当然,可以理解的是,上述第二导向孔112和第二通孔114的数量并非限定为四个,还可以为其他数量,本发明对此不作特别限定,保证能够稳定引导第二车轮组件300和提供弹性力即可。
如图2和图3所示,图3示出的是图2中A处的局部放大图。本发明实施例的第一车轮组件200包括第一安装部210、第一抵压件240、第一轮部220和第一弹性元件。
第一安装部210可移动地连接于安装件100。第一安装部210上开设有第一穿孔,第一穿孔与安装板110的第一导向孔111对应设置。在一实施方式中,第一穿孔的数量可以为四个,四个第一穿孔均匀设置在第一安装部210的四周,且分别与四个第一导向孔111对应设置。第一导向轴510穿设于第一导向孔111和第一穿孔,以引导第一车轮组件200沿竖直方向移动。
当然,可以理解的是,第一安装部210与安装板110的可移动连接方式并非限定于上述的第一导向轴510穿设于第一导向孔111和第一穿孔的方式,例如还可以为滑块与导轨相配合的方式等。
第一弹性元件可以为压簧。第一抵压件240包括第一杆部和第一帽部,第一弹性元件套设于第一杆部的外部。第一安装部210具有第一凹槽,第一杆部和第一弹性元件穿设于第一通孔113,第一杆部和第一弹性元件的一端设于第一凹槽内,第一帽部连接于第一杆部的另一端,且连接于安装件100。第一弹性元件的两端分别抵顶于第一凹槽的底壁和第一帽部。在一实施方式中,第一抵压件240的数量可以为四个,相对应的,第一弹性元件的数量也可以为四个,四个第一弹性元件分别与四个第一抵压件240对应设置。
当第一轮部220受到地面的作用力,沿竖直方向靠近安装板110移动时,第一弹性元件能够提供弹性阻尼力,使得第一安装部210受到一弹性支撑力,从而在第一轮部220处形成辅助支点。
在一实施方式中,第一车轮组件200的第一轮部220可转动地连接于第一安装部210,例如第一轮部220可以为一万向轮。
如图3所示,本发明实施例的第二车轮组件300包括第二安装部310、第二抵压件340、第二轮部320和第二弹性元件330。
第二安装部310可移动地连接于安装件100。第二安装部310上开设有第二穿孔311,第二穿孔311与安装板110的第二导向孔112对应设置。在一实施方式中,第二穿孔311的数量可以为四个,四个第二穿孔311均匀设置在第二安装部310的四周,且分别与四个第二导向孔112对应设置。第二导向轴520穿设于第二导向孔112和第二穿孔311,以引导第二车轮组件300沿竖直方向移动。
当然,可以理解的是,第二安装部310与安装板110的可移动连接方式并非限定于上述的第二导向轴520穿设于第二导向孔112和第二穿孔311的方式,例如还可以为滑块与导轨相配合的方式等。
第二弹性元件330可以为压簧。第二抵压件340包括第二杆部341和第二帽部342,第二弹性元件330套设于第二杆部341的外部。第二安装部310具有第二凹槽312,第二杆部341和第二弹性元件330穿设于第二通孔114,第二杆部341和第二弹性元件330的一端设于第二凹槽312内,第二帽部342设于第二杆部341的另一端,且连接于安装件100。第二弹性元件330的两端分别抵顶于第二凹槽312的底壁和第二帽部342。在一实施方式中,第二抵压件340的数量可以为四个,相对应的,第二弹性元件330的数量也可以为四个,四个第二弹性元件330分别与四个第二抵压件340对应设置。
当第二轮部320受到地面的作用力,沿着竖直方向靠近安装板110移动时,第二弹性元件330能够提供弹性阻尼力,使得第二安装部310受到一弹性支撑力,从而在第二轮部320处形成辅助支点。
在一实施方式中,第二车轮组件300的第二轮部320可转动地连接于第二安装部310,例如第二轮部320可以为一舵轮。
如图2所示,本发明实施例的摆动组件400铰接于铰接架120,摆动组件400的一端铰接于第一安装部210,摆动组件400的另一端铰接于第二安装部310。当第一车轮组件200和第二车轮组件300的其中之一相对于安装件100活动时,摆动组件400能够绕铰接点摆动,使得第一车轮组件200和第二车轮组件300的其中另一随动,以使第一车轮组件200和第二车轮组件300均能与地面接触。
本发明实施例的摆动组件400包括摆动件410、第一连杆420和第二连杆430,摆动件410铰接于铰接架120,摆动件410的一端铰接于第一连杆420的一端,摆动件410的另一端铰接于第二连杆430的一端。第一连杆420的另一端铰接于第一车轮组件200的第一安装部210,第二连杆430的另一端铰接于第二车轮组件300的第二安装部310。
下面结合图4至图6,详细介绍本发明实施例行走轮组的运动过程,其中,图4示出的是本发明一实施例的行走轮组的机构原理图,图5示出的是本发明一实施例的行走轮组处于平整地面时的示意图,图6示出的是本发明一实施例的行走轮组处于不平整地面时的示意图。
如图4所示,第一车轮组件200在竖直方向可移动地连接于安装件100,第二车轮组件300在竖直方向可移动地连接于安装件100。摆动件410的一端通过第一连杆420铰接于第一车轮组件200,摆动件410的另一端通过第二连杆430铰接于第二车轮组件300。同时,摆动件410铰接于铰接架120。
如图5所示,第一安装部210的上表面与安装板110的下表面之间的距离为T1,第二安装部310的上表面与安装板110的下表面之间的距离为T2。当本发明实施例的行走轮组行走在平整的地面上时,T1=T2。
如图6所示,当地面不平整,例如第二车轮组件300的第二轮部320的底面具有凹坑,造成第一车轮组件200升高时,第一车轮组件200沿着竖直方向靠近安装板110,T1变小。在第一安装部210向安装板110移动的过程中,摆动件410的一端随着第一安装部210的移动而向上移动,由于摆动件410可绕铰接点摆动,故摆动件410的另一端会带动第二安装部310向远离安装板110的方向移动,使得第二轮部320的底面会向凹坑的底面移动,直至与凹坑的底面接触后,摆动件410不会继续摆动。最终保证了本发明实施例的行走轮组在经过不平整地面时,第一车轮组件200和第二车轮组件300均能够与地面接触,两个车轮的正压力不会缺失。
如图4所示,摆动件410与安装件100形成第一铰接点O,摆动件410与第一连杆420形成第二铰接点P,摆动件410与第二连杆430形成第三铰接点Q,第一铰接点O与第二铰接点P之间的距离等于第一铰接点O与第三铰接点Q之间的距离,即OP=OQ。第一连杆420与第二连杆430的长度相同。
通过这样的设计,使得第一连杆420、第二连杆430和摆动件410形成一平行四边形,当摆动组件400绕铰接点摆动时,第一车轮组件200和第二车轮组件300的移动距离相等。
当然,可以理解的是,上述的摆动件410的两端还可以直接铰接于第一车轮组件200和第二车轮组件300,而不借助第一连杆420和第二连杆430。在这种直接铰接的情况下,第一车轮组件200与安装件100可活动地连接,第二车轮组件300与安装件100可活动地连接。
本发明实施例还提供一种自动导引运输车,包括车体700和上述任一实施方式中的行走轮组,行走轮组安装于车体700上。因包括上述任一实施方式中的行走轮组,故本发明实施例的自动导引运输车具有上述任一实施方式中的优点和有益效果,此处不再赘述。
如图7和图8所示,图7示出的是本发明一实施例的自动导引运输车的一个视角的结构示意图,图8示出的是本发明一实施例的自动导引运输车的另一个视角的结构示意图。本发明实施例的自动导引运输车包括车体700和两个行走轮组,两个行走轮组安装在车体700的底面。
车体700可以大致呈一矩形,两个行走轮组沿着车体700的长度方向间隔设置,每个行走轮组的第一车轮组件200包括万向轮,第二车轮组件300包括舵轮。两个行走轮组的两个万向轮沿着车体700的一对角线设置,两个行走轮组的两个舵轮沿着车体700的另一对角线设置。
下面结合图9,详细说明本发明实施例的自动导引运输车行驶在不平整路面时行走轮组的工作原理图。其中,本发明实施例的自动导引运输车包括两个行走轮组,假定A点代表其中一个行走轮组的第一车轮组件200,B点代表该行走轮组的第二车轮组件300,C点代表另一个行走轮组的第一车轮组件200,D点代表该另一个行走轮组的第二车轮组件300,E点代表行走轮组的摆动组件400与安装件100的支撑点。同时,假定B点处的地面具有凹坑。
当本发明实施例的自动导引运输车行驶在该不平整路面时,由于B点处的凹坑,B点会悬空,使得A、C和D点相对于B点被抬高。由于A点和B点属于同一个行走轮组,基于摆动组件400的作用,A点被抬高的同时会通过摆动组件400下压B点,直至B点接触到凹坑的底面为止。此时,虽然B点处具有凹坑,但通过摆动组件400的作用,A、B、C和D点的车轮均与地面接触,不会出现B点车轮悬空的情况。假若B点处的车轮为驱动轮,则不会出现驱动打滑、运动不可控的现象。
同时,由于A点被抬高,则A点的弹性元件被压缩,形成一辅助支点,最终形成A、C、D和E点对车体700的四点支撑,可提高车体700的稳定性。
综上所述,本发明实施例的自动导引运输车及其行走轮组的优点和有益效果在于:
本发明实施例的行走轮组行走在不平整地面时,第一车轮组件200和第二车轮组件300其中之一可能会悬空,使得第一车轮组件200和第二车轮组件300的其中另一相对于该被悬空的车轮升高。当该升高的车轮组件活动时,通过摆动组件400的作用,该被悬空的车轮组件会随动,直至第一车轮组件200和第二车轮组件300均与地面接触为止。通过上述的设计,使得本发明实施例的行走轮组不会出现驱动打滑现象,解决了由于车轮悬空造成的运动不可控的问题。
在此应注意,附图中示出而且在本说明书中描述的自动导引运输车及其行走轮组仅仅是采用本发明的原理的一个示例。本领域的普通技术人员应当清楚地理解,本发明的原理并非仅限于附图中示出或说明书中描述的装置的任何细节或任何部件。
应可理解的是,本发明不将其应用限制到本说明书提出的部件的详细结构和布置方式。本发明能够具有其他实施方式,并且能够以多种方式实现并且执行。前述变形形式和修改形式落在本发明的范围内。应可理解的是,本说明书公开和限定的本发明延伸到文中和/或附图中提到或明显的两个或两个以上单独特征的所有可替代组合。所有这些不同的组合构成本发明的多个可替代方面。本说明书所述的实施方式说明了已知用于实现本发明的最佳方式,并且将使本领域技术人员能够利用本发明。