成像元件和成像装置
文献发布时间:2023-06-19 18:32:25
技术领域
本发明例如涉及背面照射型成像元件和包括背面照射型成像元件的成像装置。
背景技术
在背面照射型CMOS(互补金属氧化物半导体)图像传感器(CIS)中,未被光接收部吸收而是穿过光接收部的光有时会被设置在光接收部下方的配线(wiring)层(金属层)反射而再次进入光接收部。在这些反射光的强度在各个像素中不均匀的情况下,在相邻像素之间就会发生光学混色。为了解决这个问题,例如,专利文献1公开了一种固体成像装置,其通过在光接收部的下方为各个像素设置均匀的第一反射板并且在相邻像素之间周期性地设置第二反射板来实现更高的图像质量。
引文文献列表
专利文献
专利文献1:日本未审查专利申请第2014-53429号公报
发明内容
如上所述,要求成像装置具有更高的图像质量。
期望的是,提供能够具有更高图像质量的成像元件和成像装置。
根据本发明实施方案的成像元件包括:半导体基板、多层配线层、多个结构物以及光反射层。所述半导体基板具有第一面和第二面。所述第一面用作光入射面。所述第二面与所述第一面相对。所述半导体基板包括针对各个像素的光接收部。所述光接收部通过光电转换产生电荷。所述电荷对应于接收的光的光量。所述多层配线层设置在所述半导体基板的第二面侧。所述多层配线层具有堆叠在其中的多个配线层,层间绝缘层夹在其间。所述多个结构物在所述半导体基板的第二面上设置在所述多层配线层内。所述光反射层设置在所述多层配线层中。所述光反射层在其中未形成有所述结构物的区域中形成反射区域或非反射区域,在所述光反射层与所述反射区域或所述非反射区域之间夹设有所述层间绝缘层。所述反射区域相对于所述像素的光学中心基本对称。所述非反射区域相对于所述像素的所述光学中心基本对称。
根据本发明实施方案的成像装置包括根据上述本发明实施方案的成像元件。
根据本发明的实施方案的成像元件和根据实施方案的成像装置分别在所述多层配线层中设置有光反射层,所述多层配线层设置在与用作第一半导体基板的光入射面的所述第一面相对的所述第二面侧上,所述第一半导体基板包括针对各个像素的光接收部。所述第二面包括所述多个结构物。所述光反射层在其中未形成有所述结构物的区域中形成所述反射区域或所述非反射区域,在所述光反射层与所述反射区域或所述非反射区域之间夹有所述层间绝缘层。所述反射区域相对于所述像素的光学中心基本对称。所述非反射区域相对于所述像素的所述光学中心基本对称。因此,使得被所述光反射层反射而再次进入所述光接收部的光相对于入射角而言基本均匀。
附图说明
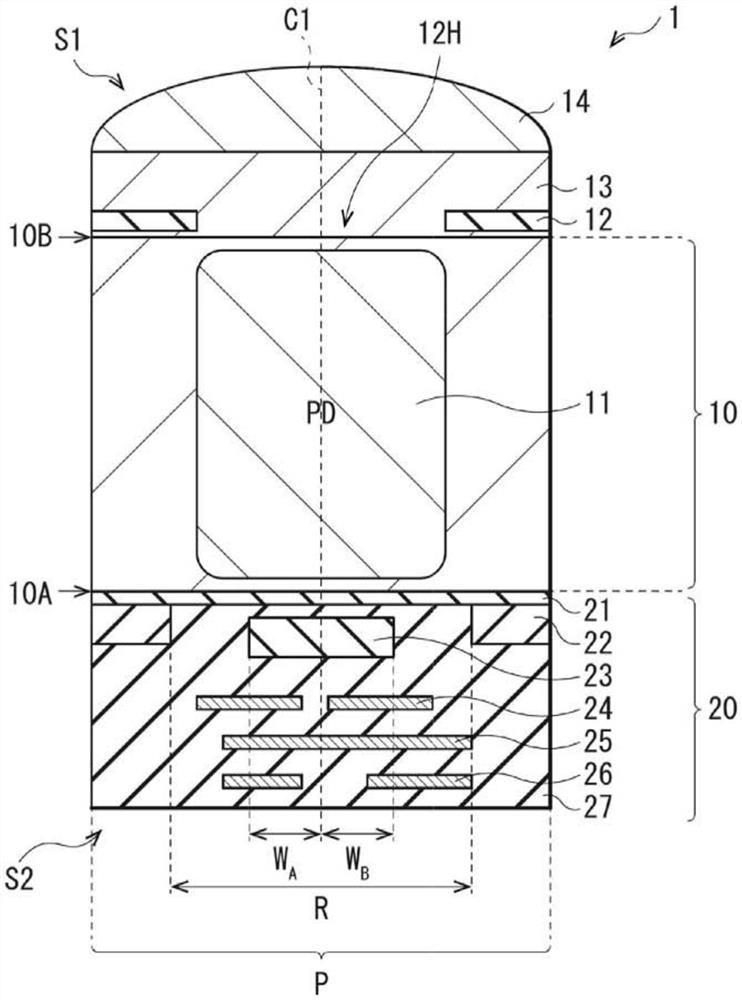
图1是示出了根据本发明实施方案的成像元件的示意性构造的示例的横截面示意图。
图2是示出了图1所示的成像元件的整体构造的框图。
图3是图1所示的成像元件的等效电路图。
图4A是示出了根据本发明实施方案的成像元件的示意性构造的另一示例的横截面示意图。
图4B是示出了图4A所示的成像元件的平面构造的示意图。
图5是示出了根据本发明的变形例1的成像元件的示意图构造的示例的横截面示意图。
图6是示出了根据本发明的变形例2的成像元件的示意图构造的示例的横截面示意图。
图7是示出了根据本发明的变形例3的成像元件的示意图构造的示例的横截面示意图。
图8是示出了根据本发明的变形例3的成像元件的示意图构造的另一示例的横截面示意图。
图9是示出了根据本发明的变形例4的成像元件的示意图构造的示例的横截面示意图。
图10是示出了根据本发明的变形例4的成像元件的示意图构造的另一示例的横截面示意图。
图11是示出了根据本发明的变形例5的成像元件的示意图构造的示例的横截面示意图。
图12是示出了根据本发明的变形例6的成像元件的示意性构造的示例的横截面示意图。
图13是示出了图12所示的成像元件的平面构造的示例的示意图。
图14是示出了本发明的变形例6的成像元件的示意性构造的另一示例的横截面示意图。
图15是示出了根据本发明的变形例7的成像元件的示意性构造的示例的平面示意图。
图16是示出了根据本发明的变形例7的成像元件的示意性构造的另一示例的平面示意图。
图17是图16所示的成像元件的横截面示意图。
图18是普通的成像元件的横截面示意图。
图19是示出了根据本发明的变形例8的成像元件的示意性构造的示例的横截面示意图。
图20是示出了图19所示的凹凸结构的构造的示例的平面示意图。
图21是示出了根据本发明的变形例8的成像元件的示意性构造的另一示例的横截面示意图。
图22是示出了图19或其他图所示的成像元件的凹凸结构的横截面构造的示例的示意图。
图23是示出了根据本发明的变形例9的成像元件的示意性构造的示例的横截面示意图。
图24是说明在图23所示的成像元件的光反射控制层中的光的反射方向的图。
图25是示出了根据本发明的变形例10的成像元件的示意性构造示例的横截面示意图。
图26是说明在图25所示的成像元件的光反射控制层中的光的反射方向的图。
图27是示出了根据本发明的变形例11的成像元件的示意性构造的示例的横截面示意图。
图28是示出了根据本发明的变形例11的成像元件的示意性构造的另一示例的平面示意图。
图29是示出了包括根据上述实施方案及变形例1~11的任一者的成像元件的成像系统的示意性构造的示例的图。
图30是示出了图29的成像系统的成像过程的示例的图。
图31是说明了车辆控制系统的示意性构造示例的框图。
图32是车外信息检测部和成像部的安装位置的示例的辅助说明图。
图33是说明了内窥镜手术系统的示意性构造的示例的视图。
图34是说明了摄像头和相机控制单元(CCU)的功能构造示例的框图。
具体实施方式
下面将参照附图详细说明本发明的实施方案。下面的说明是本发明的具体示例,但本发明不限于下面的模式。此外,本发明也不限于各图所示的各部件的配置、尺寸、尺寸比等。应当注意的是,按照以下顺序给出说明。
1.实施方案(在半导体基板的正面与多层配线层的多个配线层之间设置相对于光学中心对称的光反射层的示例)
1-1.成像元件的构造
1-2.成像装置的构造
1-3.作用和效果
2.变形例
2-1.变形例1(设置具有相对于光学中心对称的开口的光反射层的示例)
2-2.变形例2(光反射层的形状的另一示例)
2-3.变形例3(外围部中的光反射层的形成位置的示例)
2-4.变形例4(光反射层的形成位置的另一示例)
2-5.变形例5(光反射层的形成位置的另一示例)
2-6.变形例6(包括电荷保持部的成像元件的示例)
2-7.变形例7(在相邻像素之间共用读出电路的成像元件的示例)
2-8.变形例8(在半导体基板的正面设置凹凸结构的示例)
2-9.变形例9(在光反射层上进一步设置光反射控制层的示例)
2-10.变形例10(光反射控制层的另一示例)
2-11.变形例11(光反射层的另一示例)
3.应用示例
4.实际应用实例
<1.实施方案>
图1示意性示出了根据本发明实施方案的成像元件(成像元件1)的横截面构造的示例。图2示出了包括图1所示的成像元件1的成像装置(成像装置100)的整体构造的示例。成像装置100例如是用于诸如数码相机或摄像机等电子设备的CMOS图像传感器等。成像装置100包括像素部100A作为成像区域。在像素部100A中,以矩阵形式二维地布置有多个像素。成像元件1是包括在该CMOS图像传感器等中的一个像素(单位像素P)内的所谓背面照射型成像元件。
(1-1.成像元件的构造)
成像元件1具有堆叠半导体基板10和多层配线层20的构造。光接收部11形成为埋入在半导体基板10中。多层配线层20包括多个配线层(例如,配线层24、配线层25和配线层26)。半导体基板10具有彼此相对的第一面(正面)10A和第二面(背面)10B。多层配线层20设置在半导体基板10的第一面10A侧。半导体基板10的第二面10B用作光入射面。根据本实施方案的成像元件1在半导体基板10的第一面10A与设置在多层配线层20中的多个配线层(配线层24、配线层25和配线层26)之间设置有光反射层23。该光反射层23在多层配线层20的区域R中形成反射区域,层间绝缘层27夹在其间。在区域R中,没有形成设置于半导体基板10的第一面10A上的结构物。反射区域相对于单位像素P的光学中心C1基本对称。
该半导体基板10对应于根据本发明的“半导体基板”的具体示例。半导体基板10的第一面10A对应于根据本发明的“第二面”的具体示例并且半导体基板10的第二面10B对应于根据本发明的“第一面”的具体示例。光反射层23对应于根据本发明的“光反射层”的具体示例。
半导体基板10例如包括硅基板。如上所述,例如,针对各个单位像素P,光接收部11形成为埋入在半导体基板10中。该光接收部11例如是PIN(正本征负)型光电二极管PD并且在半导体基板10的预定区域中具有pn结。
半导体基板10的第一面10A设置有浮动扩散部FD和像素电路,该像素电路基于从光接收部11输出的电荷输出像素信号。像素电路包括例如传输晶体管TR、放大晶体管AMP、复位晶体管RST和选择晶体管SEL作为像素晶体管。这些浮动扩散部FD、传输晶体管TR、放大晶体管AMP、复位晶体管RST和选择晶体管SEL分别对应于根据本发明的“结构物”的具体示例。
图3示出了图1所示的成像元件1的像素电路的示例。
传输晶体管TR连接在光接收部11和浮动扩散部FD之间。驱动信号TGsig被施加至传输晶体管TR的栅极电极。在驱动信号TGsig进入激活状态(active state)的情况下,传输晶体管TR的传输栅极进入导通状态,并且累积在光接收部11中的信号电荷通过传输晶体管TR被传输至浮动扩散部FD。
浮动扩散部FD连接在传输晶体管TR和放大晶体管AMP之间。浮动扩散部FD执行电荷电压转换以将由传输晶体管TR传输的信号电荷转换为电压信号并且向放大晶体管AMP输出。
复位晶体管RST连接在浮动扩散部FD和电源部之间。驱动信号RSTsig被施加至复位晶体管RST的栅极电极。在驱动信号RSTsig进入激活状态的情况下,复位晶体管RST的复位栅极进入导通状态,并且浮动扩散部FD的电位被复位为电源部的电平。
放大晶体管AMP的栅极电极连接至浮动扩散部FD并且其漏极电极连接至电源部。放大晶体管AMP用作保持在浮动扩散部FD中的电压信号的读出电路的输入部。换言之,放大晶体管AMP用作所谓的源极跟随器电路的输入部。换言之,放大晶体管AMP的源极电极通过选择晶体管SEL连接至垂直信号线Lsig。这与连接至垂直信号线Lsig的一端的恒流源一起构成源极跟随器电路。
选择晶体管SEL连接在放大晶体管AMP的源极电极与垂直信号线Lsig之间。驱动信号SELsig被施加至选择晶体管SEL的栅极电极。在驱动信号SELsig进入激活状态的情况下,选择晶体管SEL进入导通状态并且单位像素P进入选中状态。这使得从放大晶体管AMP输出的读出信号(像素信号)通过选择晶体管SEL输出至垂直信号线Lsig。
如上所述,多层配线层20设置在半导体基板10的第一面10A侧。多层配线层20包括例如绝缘层21、栅极配线层22和其中设置有上述光反射层23和多个配线层24、25和26的层间绝缘层27。
绝缘层21例如设置在半导体基板10的第一面10A上,例如作为像素晶体管的栅极绝缘层。绝缘层21的材料的示例包括:氧化硅(SiOx)、氮化硅(SiNx)、氧氮化硅(SiOxNy)等。
栅极配线层22例如设置有上述传输晶体管TR、放大晶体管AMP、复位晶体管RST和选择晶体管SEL的栅极电极。栅极配线层22例如使用多晶硅(Poly-Si)形成。
光反射层23反射未被光接收部11吸收但已经穿过半导体基板10并且已经进入多层配线层20的光,并且使光再次进入半导体基板10。光反射层23例如在层间绝缘层27中设置在半导体基板10的第一面10A与配线层24之间。光反射层23例如针对各个单位像素P在区域R中形成反射区域,之中仅夹有绝缘层21和层间绝缘层27。在区域R中,没有设置上述像素晶体管的栅极电极。反射区域相对于单位像素P的光学中心C1基本对称。这里,词语“基本对称”是指,例如,相对于光学中心C1的左右宽度WA和WB之间大致相等(WA≈WB)。光学中心C1是穿过片上透镜14的透镜中心和遮光膜12的开口12H的中心的轴线。下文将对片上透镜14和遮光膜12进行说明。
可以通过使用具有光反射性的材料来形成光反射层23。具有光反射性的材料的示例包括包含钨(W)、铝(Al)、铜(Cu)等的金属材料。此外,例如也可以使用所谓电介质多层膜来形成光反射层23,在所谓的电介质多层膜中交替地堆叠有包含具有高折射率的无机材料的层和包含具有低折射率的无机材料的层。具有高折射率的无机材料的示例包括氧化钛(TiO
配线层24、配线层25和配线层26例如用于驱动光接收部11、发送信号、向各部位施加电压等。配线层24、配线层25和配线层26从半导体基板10侧按配线层24、配线层25和配线层26的顺序堆叠在层间绝缘层27中,在它们之间夹有层间绝缘层27。通过使用例如铜(Cu)或铝(Al)来形成配线层24、配线层25和配线层26中的各者。
层间绝缘层27设置在绝缘层21上以覆盖栅极配线层22。如上所述,层间绝缘层27包括在其中的光反射层23和配线层24、配线层25和配线层26。与绝缘层21一样,使用例如氧化硅(SiO
例如,遮光膜12、保护层13和片上透镜14设置在半导体基板10的第二面10B侧。
遮光膜12用于防止来自光入射侧S1的倾斜光进入相邻单位像素P。遮光膜12例如设置在相邻单位像素P之间。遮光膜12在单位像素P的中央具有开口12H。通过使用例如钨(W)等的金属膜来形成遮光膜12。
保护层13例如包括形成在其中的遮光膜12。保护层13用于保护半导体基板10的第二面10B,并且使光入射侧S1的面平坦化。通过使用例如氧化硅(SiO
片上透镜14用于将来自光入射侧S1的光会聚到光接收部11上。通过使用高折射率材料来形成片上透镜14。具体地,例如使用诸如氧化硅(SiO
(1-2.成像装置的构造)
成像装置100例如是CMOS图像传感器。成像装置100通过光学透镜系统(未图示)获取来自被摄体的入射光(图像光)。成像装置100以像素为单位将形成在成像面上作为图像的入射光的量转换为电信号,并且将电信号作为像素信号输出。成像装置100包括用作半导体基板10的成像区域的像素部100A。此外,成像装置100例如包括垂直驱动电路111、列信号处理电路112、水平驱动电路113、输出电路114、控制电路115和在像素部100A的外围区域中的输入输出端子116。
像素部100A例如包括以矩阵形式二维配置的多个单位像素P。这些单位像素P例如针对各个像素行设置有像素驱动线Lread(具体地,行选择线和复位控制线),并且针对各个像素列设置有垂直信号线Lsig。像素驱动线Lread用于传输用于从像素读出信号的驱动信号。像素驱动线Lread的一端连接至对应于各个行的垂直驱动电路111的输出端。
垂直驱动电路111包括移位寄存器、地址解码器等。垂直驱动电路111例如是以行为单位驱动像素部100A的各个单位像素P的像素驱动器。从由垂直驱动电路111选择性扫描的像素行中的各个单位像素P输出的信号通过各个垂直信号线Lsig被供给至列信号处理电路112。各个列信号处理电路112包括针对各个垂直信号线Lsig设置的放大器、水平选择开关等。
水平驱动电路113包括移位寄存器、地址解码器等。水平驱动电路113在扫描水平选择开关的同时依次驱动列信号处理电路112的各个水平选择开关。水平驱动电路113的这种选择性扫描将通过各个垂直信号线Lsig传输的各个像素的信号依次输出至水平信号线121,并且通过水平信号线121将信号传输至半导体基板10的外部。
输出电路114对通过水平信号线121从各个列信号处理电路112依次供给的信号执行信号处理并且输出这些信号。例如,输出电路114在某些情况下仅进行缓冲,并且在其他情况下执行黑电平调整、列变化校正、各种类型的数字信号处理等。
包括垂直驱动电路111、列信号处理电路112、水平驱动电路113、水平信号线121和输出电路114的电路部可以直接形成在半导体基板10上或者可以设置在外部控制IC中。此外,这些电路部可以形成在通过电缆等连接的另一基板中。
控制电路115接收从半导体基板10的外部供给的时钟、用于指示关于操作模式的数据等,并且还输出诸如成像装置100的内部信息的数据。控制电路115还包括时序生成器,其产生各种时序信号并且基于由时序生成器生成的各种时序信号控制诸如垂直驱动电路111、列信号处理电路112和水平驱动电路113等外围电路的驱动。
输入输出端子116与外部交换信号。
(1-3.作用和效果)
在根据本实施方案的成像元件1中,光反射层23设置在设置于半导体基板10的与光入射侧S1相对的第一面10A侧的多层配线层20的区域R中。在区域R中,没有形成设置于半导体基板10的第一面10A上的像素晶体管的栅极电极等。光反射层23隔着绝缘层21和层间绝缘层27形成反射区域,反射区域相对于单位像素P的光学中心C1基本对称。因此使得穿过半导体基板10并且被光反射层23反射而再次进入光接收部11的光相对于入射角基本均匀。下面对此进行说明。
背面照射型CIS不对来自光接收部的光入射面的所有光进行光电转换。一部分光穿过半导体基板并且进入设置在半导体基板的与光入射面相对的一侧的多层配线层。在这种情况下,在进入多层配线层的光的前方存在反射器(reflector),这就会使光被再次朝向光接收部反射。这有望提高灵敏度并且抑制颜色混合。
然而,在反射器与半导体基板相对的区域或者在半导体基板的与光入射面相对侧的面与反射器之间没有诸如像素晶体管的栅极配线或元件分离部等结构物的区域中以相对于光学中心不平衡的方式形成反射器的情况下,被反射器反射的光相对于光学中心也具有不对称性。在具有不对称性的光以这种方式再次进入光接收部的情况下,在光的入射方向上发生很大的灵敏度变化并且图像质量会降低。
相比之下,在本实施方案中,光反射层23设置在设置于半导体基板10的与光入射侧S1相对的第一面10A侧的多层配线层20的区域R中。在区域R中,没有形成半导体基板10的第一面10A上设置的像素晶体管的栅极电极等。该光反射层23形成相对于单位像素P的光学中心C1基本对称的反射区域。光反射层23具有如下布局:其中,光反射层23相对于光学中心C1具有对称性。因此使得被光反射层23反射而再次进入光接收部11的光相对于入射角基本均匀。
如上所述,根据本实施方案的成像元件1在多层配线层20内的区域R中设置有光反射层23。在区域R中,没有形成诸如包括在像素晶体管中的栅极电极(栅极配线层22)等的结构物。光反射层23形成反射区域,层间绝缘层27夹在其中。反射区域相对于单位像素P的光学中心C1基本对称。因此使得未被光接收部11吸收但进入多层配线层20并被光反射层23反射而再次进入光接收部11的光相对于入射角基本均匀。这改善了各个单位像素P的灵敏度变化。阴影形状在场角的中间具有峰值。这使得能够提高图像质量。
应当注意的是,本实施方案已经说明了通过在半导体基板10的第一面10A和形成在多层配线层20的多个配线层24之间设置光反射层23来形成相对于单位像素P的光学中心C1基本对称的反射区域的示例,但是该反射区域也可以由形成为堆叠的且在之间形成有层间绝缘层27的配线层24、配线层25或配线层26中的任一者形成。
具体地,例如,如图4A所示,例如在区域R中形成相对于单位像素P的光学中心C1基本对称的配线层24的情况下,可以使用该配线层24作为光反射层。在区域R中,没有形成诸如包括在像素晶体管中的栅极电极等结构物。在这种情况下,如图4A所示,可以形成连接栅极配线层22和用作光反射层的配线层24的接触部24C。如图4B所示,该接触部24C设置成环形形状以包围区域R。这将透过光接收部11的光限制在自己的像素中。这使得能够提高灵敏度并且抑制在相邻的单位像素P中发生颜色混合。
接下来,将说明本发明变形例1至变形例11。下面对与上述实施方案类似的部件指定相同的标记并且适当地省略其说明。
<2.变形例>
(2-1.变形例1)
图5示意性示出了根据本发明变形例1的成像元件(成像元件1A)的横截面构造的示例。在上述实施方案中,说明了设置形成相对于单位像素P的光学中心C1基本对称的反射区域的光反射层23的示例,但是光反射层23的形状不限于此。例如,本变形例与上述实施方案的不同之处在于:设置有形成相对于单位像素P的光学中心C1基本对称的非反射区域的光反射层33。
光反射层33例如设置在整个单位像素P上。光反射层33具有相对于单位像素P的光学中心C1基本对称的开口33H。该开口33H形成相对于光学中心C1基本对称的非反射区域。具体地,如图5所示,在区域R中没有形成包括浮动扩散部FD、传输晶体管TR、放大晶体管AMP、复位晶体管RST、选择晶体管SEL等的任何结构物,并且光反射层33例如从区域R延伸至上述像素晶体管的栅极电极的下方。这里,词语“基本对称”是指,例如,在开口33H的相对于光学中心C1的左右宽度WC和WD大致相等(WC≈WD)。
这样,在本变形例中,光反射层33设置在整个单位像素P上,并且具有相对于单位像素P的光学中心C1基本对称的开口33H。因此,在没有形成任何结构物的区域R中形成非反射区域。非反射区域相对于光学中心C1基本对称。因此使得未被光接收部11吸收但进入多层配线层20并被光反射层23反射而再次进入光接收部11的光相对于入射角基本均匀。这改善了各个单位像素P的灵敏度变化。阴影形状在场角的中间具有峰值。这使得能够提高图像质量。
(2-2.变形例2)
图6示意性示出了根据本发明变形例2的成像元件(成像元件1B)的横截面构造的示例。在上述实施方案中,已经说明了仅在没有形成任何结构物的区域R中设置光反射层23的示例,但是这不是限制性的。例如,如上述实施方案所述,只要光反射层23形成反射区域且层间绝缘层27夹在其中就足够了。反射区域相对于单位像素P的光学中心C1基本对称。例如,如图6所示,只要相对于光学中心C1的左右宽度WA和WB满足WA≈WB,光反射层23的一部分可以延伸至栅极配线层22的下方。
(2-3.变形例3)
图7示意性示出了根据本发明变形例3的成像元件(成像元件1C)的横截面构造的示例。例如,在图2所示的成像装置100中,在应用了光瞳校正的像素部100A的外围部附近的单位像素P中包括成像元件1C。
在对像素部100A的外围部附近的单位像素P应用校正的情况下,片上透镜14的透镜中心和遮光膜12的开口12H的中心形成在沿着预定方向(例如,像素部100A的中间方向)偏移的位置处。
在这种情况下,例如,如图7所示,优选的是将光反射层23形成为使得光反射层23根据上面应用的光瞳校正量在与遮光膜12的开口12H的偏移方向相反的方向上偏移。或者,例如,如图8所示,如上述变形例1那样,光反射层33可以被设置为根据上面应用的光瞳校正量而在与遮光膜12的开口12H的偏移方向相反的方向上具有开口33H。这降低了设置在外围部附近的单位像素P的灵敏度变化。所述灵敏度变化是由光瞳校正的应用而导致的。这使得能够提高图像质量。
(2-4.变形例4)
图9示意性示出了根据本发明变形例4的成像元件(成像元件1D)的横截面构造的示例。在上述实施方案等中,已经说明了设置在半导体基板10的第一面10A上的结构物(栅极配线层22)形成为相对于光学中心C1对称的示例。但是,在相邻的2个单位像素P共用一个像素晶体管的情况下,例如,如后述的变形例7,光学中心C1和区域R的中心C2有时不一致。在区域R中,在半导体基板10的第一面10A上没有形成任何结构物。
在这种情况下,灵敏度可能降低的区域被光反射层23覆盖。这使得能够调整灵敏度平衡。具体地,例如,如图9所示,可以设置光反射层23以使得例如相对于光学中心C1的左右宽度WA和WB满足WA>WB。或者,例如,如图10所示,可以设置光反射层33以使得例如开口33H相对于光学中心C1的左右宽度WC和WD满足WC<WD。这减小了单位像素P的灵敏度变化。这使得能够提高图像质量。
(2-5.变形例5)
图11示意性示出了根据本发明变形例5的成像元件(成像元件1E)的横截面构造的示例。例如,与上述变形例4中同样地,在光学中心C1的左右灵敏度变化的情况下,如图11所示,光反射层23可以选择性地形成在具有较低灵敏度的区域中。因此这减少了单位像素P的灵敏度变化。这使得能够提高图像质量。
(2-6.变形例6)
图12示意性示出了根据本发明变形例6的成像元件(成像元件1F)的横截面构造的示例。根据本变形例的成像元件1F实现了具有所谓全局快门模式的背面照射型CIS。背面照射型CIS例如包括单位像素P中的电荷保持部15。电荷保持部15临时地累积电荷。电荷是由光接收部11产生的。
全局快门模式是用于执行对于所有像素大致同时开始曝光并且对于所有像素同时结束曝光的全局曝光的模式。这里,所有像素是指在图像中出现的部分中的所有像素,并且不包括伪像素等。此外,在时间差或图像失真小到不会引起问题的情况下,全局快门模式还包括用于在不是同时对所有像素而是对多个行(例如,数十行)同时执行全局曝光的同时改变全局曝光的区域的模式。此外,全局快门模式还包括对预定区域中的像素而不是图像中出现的部分的所有像素执行全局曝光的模式。
图13示意性示出了图12所示的成像元件1F的具体平面构造的示例。图14示意性示出了沿着图13所示的I-I线截取的成像元件1F的横截面构造。
除了传输晶体管TR、放大晶体管AMP、复位晶体管RST和选择晶体管SEL之外,成像元件1F还包括转换效率切换晶体管OFG作为像素晶体管。转换效率切换晶体管OFG初始化PD。换言之,转换效率切换晶体管OFG将PD复位。此外,例如,元件分离部16连续地形成在放大晶体管AMP、复位晶体管RST和选择晶体管SEL的各自的栅极电极的两端以及单位像素P的外围。
如上所述,电荷保持部(MEM)15用于临时地保持由光接收部11产生的电荷直到电荷被传输至浮动扩散部FD。与光接收部11一样,电荷保持部15形成为例如埋入在半导体基板10的第一面10A侧。
转换效率切换晶体管OFG根据施加至其栅极电极的驱动信号来复位PD。转换效率切换晶体管OFG包括例如连接至电源线VDD的漏极和连接至传输晶体管TR的源极。
在成像元件1F中,沿着单位像素P的一侧平行地布置有浮动扩散部FD、放大晶体管AMP、复位晶体管RST和选择晶体管SEL。例如,在浮动扩散部FD附近形成电荷保持部15。传输晶体管TR配置在浮动扩散部FD和电荷保持部15之间。转换效率切换晶体管OFG配置在与平行地布置有浮动扩散部FD、放大晶体管AMP、复位晶体管RST和选择晶体管SEL的一侧相对的另一侧。光接收部11形成在平行地布置的浮动扩散部FD、放大晶体管AMP、复位晶体管RST和选择晶体管SEL与转换效率切换晶体管OFG之间。
与在上述实施方案等中一样地,光反射层23在光接收部11的下方形成反射区域。反射区域相对于单位像素P的光学中心C1基本对称。光反射层23进一步延伸以在从配线层侧S2侧的平面图中覆盖电荷保持部15。这使得能够减少光泄漏到电荷保持部15中,这样的光泄漏会导致混叠(aliasing)(寄生感光度)。
如上所述,本变形例应用于具有全局快门模式的背面照射型CIS,并且光反射层23的一部分在从配线层侧S2侧的平面图中延伸至覆盖电荷保持部15。因此,与在上述实施方案中同样地,使得由光反射层23反射而再次进入光接收部11的光相对于入射角基本均匀。此外,这减少了光泄漏到电荷保持部15中。与在上述实施方案中同样地,这还使得具有全局快门模式的背面照射型CIS具有更高的图像质量。
(2-7.变形例7)
在上述实施方案等中,已经说明了为各个单位像素P设置像素晶体管的示例,但是像素晶体管可以例如在相邻的两个单位像素P之间共用。
图15示意性示出了与上述成像元件1类似的具有非全局快门模式的成像元件1G的平面构造的示例。在成像元件1G中,相邻的两个单位像素P共用一个像素晶体管。图16示意性示出了与上述成像元件1F类似的具有全局快门模式的成像元件1H的平面构造的示例。在成像元件1H中,相邻的两个单位像素P(P1和P2)共用一个像素晶体管。图17示意性示出了沿着图16所示的II-II线截取的成像元件1H的横截面构造。
在成像元件1G和成像元件1H中,各个光反射层23在相邻的单位像素P之间具有镜面对称形状。
与在成像元件1G和成像元件1H中一样,相邻的两个单位像素P1和P2共用像素晶体管的一般的成像元件(成像元件1000;参照图18)设置有用于抑制光泄漏到电荷保持部(MEM)的遮光膜。该遮光膜例如使用钨(W)形成。遮光膜延伸至光接收部。例如,如图18所示,该遮光膜(遮光膜1023)具有相对于包括光接收部1011的光学中心C1的非对称布局。具体地,遮光膜1023的相对于光学中心C1的左右WA和WB以及WA'和WB'在没有设置像素晶体管的栅极电极(栅极配线1021)的区域R中分别满足例如WA<WB和WA'<WB'。这使得在像素部中的以矩阵形式二维布置的多个像素之中的例如在行方向上的奇数像素(例如,图17的单位像素P1)与偶数像素(例如,图17的单位像素P2)之间的灵敏度产生差异。这显示为垂直条纹。此外,各个像素中的阴影峰值不同。
相比之下,在本变形例中,光反射层23被设置为形成相对于分别包含光接收部11的相邻的单位像素P1和单位像素P2的光学中心C1基本对称的反射区域。因此,使得被光反射层23反射而再次进入各个光接收部11的光相对于单位像素P1和单位像素P2的入射角基本均匀。因此单位像素P1和单位像素P2的各个阴影形状在场角的中央具有峰值。这减小了在以矩阵形式二维布置的多个上述像素之中的例如在行方向上的奇数像素与偶数像素之间的灵敏度差异。这使得能够提高图像质量。
(2-8.变形例8)
图19示意性示出了根据本发明的变形例8的成像元件(成像元件1I)的横截面构造的示例。根据本变形例的成像元件1I与上述实施方案的不同之处在于:在半导体基板10的第一面10A设置有凹凸结构17。
例如,如图20所示,例如在区域R中以矩阵形式形成多个凹凸结构17。在区域R中,没有形成半导体基板10的第一面10A上的结构物。多个凹凸结构17具有棱锥状的凹入部。例如,这些凹入部均填充有氧化硅(SiO
此外,例如,如图21所示,在半导体基板10的第一面10A上可以形成相对于光学中心C1基本对称的凹面状的凹入部。这些凹入部中的各者例如与图19或其他图所示的凹凸结构17一样填充有SiO
应当注意的是,例如,如图22所示,在其上形成有凹凸结构17的半导体基板10的正面可以设置反射膜17B。反射膜17B包括金属膜等。这提高了凹凸结构17的表面的光反射率。
以这种方式,在本变形例中,凹凸结构17设置在半导体基板10的第一面10A上。这改善了单位像素P的灵敏度变化,使得各个阴影形状在场角的中央具有峰值。此外,在如上述在相邻的两个单位像素P之间共用一个像素晶体管的变形例7所示的成像元件中,减小了奇数像素和偶数像素之间的灵敏度差异。这使得能够提高图像质量。
(2-9.变形例9)
图23示意性示出了根据本发明的变形例9的成像元件(成像元件1J)的横截面构造的示例。根据本变形例的成像元件1J与上述实施方案的不同点在于:在上述实施方案等中形成的光反射层23上设置有光反射控制层28A和光反射控制层28B。光反射控制层28A和光反射控制层28B具有彼此不同的折射率。
可以通过使用例如其中使用金属或电介质纳米结构的单层膜或多层膜的超材料(metamaterial)来形成各个光反射控制层28(28A和28B)。
以这种方式,在光反射层23上设置有分别具有预定折射率的光反射控制层28A和光反射控制层28B。这使得能够控制光在光反射层23的表面上的反射方向,例如,如图23和图24所示。这使得除了上述实施方案的效果之外,还能够进一步提高图像质量。
(2-10.变形例10)
图25示意性示出了根据本发明的变形例10的成像元件(成像元件1K)的横截面构造的示例。在上述变形例9中,说明了使用超材料来形成各个光反射控制层28的示例,但是也可以通过使用例如在平面内具有不同的折射率的超透镜来形成光反射控制层28。这使得能够控制光在光反射层23的表面上的反射方向,例如,如图25和图26所示。这使得与上述变形例9同样地,除了上述实施方案的效果之外,还能够进一步提高图像质量。
(2-11.变形例11)
图27示意性示出了根据本发明的变形例11的成像元件(成像元件1L)的横截面构造的示例。图28示意性示出了根据本发明的变形例11的成像元件1L的横截面构造的另一个示例。本变形例的成像元件1L与上述实施方案的不同点在于:在设置于半导体基板的第一面10A侧的多层配线层20的区域R中设置有光反射层43,并且在与半导体基板10的第一面10A相面对的表面上设置有例如如图27和图28所示的凹凸结构或台阶。在区域R中,例如与上述实施方案同样地,没有设置诸如像素晶体管的栅极电极等结构物。上述凹凸结构或台阶相对于光学中心C1基本对称或不对称。
以这种方式,在光反射层43的表面上设置有凹凸结构或台阶。这使得能够控制光在光反射层43的表面上的反射方向。这使得除了上述实施方案的效果之外,还能够进一步提高图像质量。
此外,在上述实施方案中,已经说明了通过使用诸如钨(W)等金属材料或电介质多层膜来形成光反射层23的示例,但是光反射层43也可以通过使用具有与层间绝缘层27中包含的绝缘材料的折射率不同的折射率的绝缘材料来形成。这也能够控制光在通过使用绝缘材料形成的光反射层43的表面上的反射方向。
<3.应用示例>
图29示出了包括根据上述实施方案和变形例1至变形例11的任何一者的成像元件(例如,成像元件1)的成像系统2的示意性构造的示例。
成像系统2例如是包括数码相机、摄像机等的成像装置或者智能手机、平板型终端等的便携式终端装置等等。成像系统2例如包括成像元件1、光学系统241、快门装置242、DSP电路243、帧存储器244、显示部245、存储部246、操作部247和电源部248。在成像系统2中,成像元件1、DSP电路243、帧存储器244、显示部245、存储部246、操作部247和电源部248通过总线249彼此连接。
成像元件1输出对应于入射光的图像数据。光学系统241包括一个或多个透镜。光学系统241将来自被摄体的光(入射光)引导至成像元件1,以在成像元件1的光接收面上形成图像。快门装置242配置在光学系统241与成像元件1之间,并且在驱动电路的控制下控制用光照射成像元件1的周期和遮光周期。DSP电路243是对从成像元件1输出的信号(图像数据)进行处理的信号处理电路。帧存储器244以帧为单位临时地保持由DSP电路243处理过的图像数据。显示部245例如包括诸如液晶面板或有机EL(电致发光)面板等面板型显示装置,并且显示由成像元件1拍摄的运动图像或静止图像。存储部246将由成像元件1拍摄的运动图像或静止图像的图像数据记录在诸如半导体存储器或硬盘等记录介质中。操作部247根据用户的操作发出针对成像系统2的各种功能的操作指令。电源部248适当地向作为供给对象的成像元件1、DSP电路243、帧存储器244、显示部245、存储部246、操作部247供给用于操作的各种电力。
接下来,将说明成像系统2的成像过程。
图30示出了成像系统2的成像操作的流程图的示例。用户通过操作操作部247发出指令来开始成像(步骤S101)。操作部247然后将成像指令发送至成像元件1(步骤S102)。成像元件1(具体地,系统控制电路)在接收到成像指令时,以预定的成像方式执行成像(步骤S103)。
成像元件1将通过执行成像获得的图像数据输出至DSP电路243。这里,图像数据是指基于临时地保持在浮动扩散部FD中的电荷产生的像素信号的所有像素的数据。DSP电路243基于从成像元件1输入的图像数据,执行预定的信号处理(例如,降噪处理等)(步骤S104)。DSP电路243使帧存储器244保持经过预定信号处理的图像数据,并且帧存储器244使存储部246存储图像数据(步骤S105)。以这种方式,成像系统2执行了成像。
在本应用示例中,根据上述实施方案和变形例1至变形例6的成像元件1和成像元件1A至成像元件1F分别应用于成像系统2。这使得成像元件1的尺寸更小或清晰度更高,使得能够提供尺寸小或清晰度高的成像系统2。
<4.实际应用示例>
(移动体实际应用示例)
根据本发明的技术(本技术)可以应用到各种产品。例如,根据本发明的实施例的技术可以实现为安装在诸如汽车、电动车、混合动力汽车、摩托车、自行车、个人移动设备、飞机、无人机、船舶、机器人等任意类型的移动体上的装置。
图31是示出了作为可以应用根据本发明的实施例的技术的移动体控制系统的示例的车辆控制系统的示意性配置的示例的框图。
车辆控制系统12000包含通过通信网络12001彼此连接的多个电控制单元。在图31说明的例子中,车辆控制系统12000包括驱动系统控制单元12010、车身系统控制单元12020、车外信息检测单元12030、车内信息检测单元12040和集成控制单元12050。此外,示出了作为集成控制单元12050的功能配置的微型计算机12051、声音图像输出部12052和车载网络接口(I/F)12053。
驱动系统控制单元12010根据各种类型的程序控制与车辆的驱动系统相关的装置的操作。例如,驱动系统控制单元12010用作如下装置的控制装置:诸如内燃机、驱动马达等用于产生车辆驱动力的驱动力产生装置、将驱动力传递到车轮的驱动力传递机构、调整车辆转向角的转向机构、产生车辆制动力的制动装置等。
车身系统控制单元12020根据各种类型的程序控制设置在车身上的各种类型的装置的操作。例如,车身系统控制单元12020用作无钥匙进入系统、智能钥匙系统、电动车窗装置或诸如前照灯、倒车灯、刹车灯、转向灯、雾灯等各种灯的控制装置。在这种情况下,可以向车身系统控制单元12020输入从替代钥匙的移动装置发送的无线电波或者各种开关的信号。车身系统控制单元12020接收这些无线电波或者信号的输入,并且控制车辆的门锁装置、电动车窗装置或车灯等。
车外信息检测单元12030检测关于包含车辆控制系统12000的车辆的外部的信息。例如,车外信息检测单元12030连接至成像部12031。车外信息检测单元12030使成像部12031对车辆外部的图像成像,并且接收所成像的图像。基于所接收到的图像,车外信息检测单元12030可以执行检测诸如人、车辆、障碍物、标志、路面上的字符等的对象的处理,或者检测距上述对象的距离的处理。
成像部12031是接收光线并且输出与接收到光的光量相对应的电信号的光学传感器。成像部12031可以将电信号作为图像输出,或者可以将电信号作为关于测量的距离的信息输出。此外,由成像部12031接收的光可以是可见光,或者可以是诸如红外线等不可见光。
车内信息检测单元12040检测关于车辆的内部的信息。车内信息检测单元12040例如与检测驾驶员状态的驾驶员状态检测部12041连接。驾驶员状态检测部12041例如包括拍摄驾驶员的相机。基于从驾驶员状态检测部12041输入的检测信息,车内信息检测单元12040可以计算驾驶员的疲劳程度或者驾驶员的专注程度,或者可以确定驾驶员是否在打瞌睡。
微型计算机12051可以基于由车外信息检测单元12030或车内信息检测单元12040获取的关于车辆内部或外部的信息来计算驱动力产生装置、转向机构或者制动装置的控制目标值,并且向驾驶系统控制单元12010输出控制命令。例如,微型计算机12051可以执行旨在实现高级驾驶员辅助系统(ADAS)的功能的协同控制,ADAS功能包括用于车辆的碰撞避免或冲击减缓、基于跟车距离的跟随驾驶、车速保持驾驶、车辆碰撞警告、车辆偏离车道警告等。
此外,通过基于由车外信息检测单元12030或车内信息检测单元12040获取的关于车辆外部或内部的信息控制驱动力产生装置、转向机构、制动装置等,微型计算机12051能够执行旨在实现自动驾驶等的协同控制,所述自动驾驶使得车辆能够在不依赖驾驶员的操作的情况下自主的行驶。
此外,基于由车外信息检测单元12030获取的关于车辆外部的信息,微型计算机12051可以向车身系统控制单元12020输出控制命令。例如,微型计算机12051可以例如根据由车外信息检测单元12030检测到的前方车辆或迎面而来的车辆的位置,通过控制前照灯以从远光变为近光来执行旨在防止眩光的协同控制。
声音图像输出部12052将声音或者图像中的至少一者的输出信号发送到能够在视觉或者听觉上通知车辆的乘客或车辆外部的输出装置。在图67的示例中,音频扬声器12061、显示部12062和仪表板12063被示出为输出装置。显示部12062例如可以包括车载显示器和平视显示器中的至少一者。
图32是说明成像部12031的安装位置的示例的示意图。
在图32中,成像部12031包括成像部12101、成像部12102、成像部12103、成像部12104和成像部12105。
成像部12101、成像部12102、成像部12103、成像部12104和成像部12105例如设置在车辆12100的前鼻、侧视镜、后保险杠和后门上的位置以及车内的挡风玻璃的上部的位置等。设置在前鼻的成像部12101和设置在车内的挡风玻璃上部的成像部12105主要获取车辆12100的前方的图像。设置在侧视镜的成像部12102和成像部12103主要获取车辆12100的两侧的图像。设置在后保险杠或后门上的成像部12104主要获取车辆12100的后方的图像。设置在车内的挡风玻璃上部的成像部12105主要用于检测前方车辆、行人、障碍物、信号、交通标志、车道等。
顺便提及地,图32示出了成像部12101至成像部12104的成像范围的示例。成像范围12111代表设置在前鼻的成像部12101的成像范围。成像范围12112和12113分别代表设置在侧视镜的成像部12102和成像部12103的成像范围。成像范围12114代表设置在后保险杠或后盖上的成像部12104的成像范围。例如,通过叠加由成像部12101至成像部12104成像的图像数据获得从上面观察的车辆12100的鸟瞰图像。
成像部12101至成像部12104中的至少一者可以具有获取距离信息的功能。例如,成像部12101至成像部12104中的至少一个可以是由多个成像元件组成的立体相机,或者可以使具有用于相位差检测的像素的成像元件。
例如,基于从成像部12101至成像部12104获取的距离信息,微型计算机12051可以确定在成像范围12111到成像范围12114内的各个三维对象的距离和所述距离的时间变化(相对于车辆12100的相对速度),并且从而提取特别是在车辆12100的行驶路径上的并且以预定速度(例如,等于或大于0千米/小时)沿着与车辆12100大致相同的方向行驶的最靠近的三维物体作为前方车辆。此外,微型计算机12051可以预先设定保持在前方车辆前面的跟随距离,并且进行自动制动控制(包括跟随停止控制)、自动加速控制(包括跟随起动控制)等。因此,能够执行旨在使车辆不依赖于驾驶员的操作而自动行驶的自动驾驶等的协同控制。
例如,基于从成像部12101至成像部12104获取的距离信息,微型计算机12501可以将关于三维物体的三维物体数据分类为两轮车辆、标准车辆、大型车辆、行人、电线杆和其它三维物体的三维对象数据,提取分类后的三维对象数据,并且使用提取的三维物体数据用于障碍物的自动躲避。例如,微型计算机12051将车辆12100周围的障碍物分类为车辆12100的驾驶员能够视觉识别的障碍物和车辆12100的驾驶员难以视觉识别的障碍物。然后,微型计算机12051确定用于指示与各个障碍物碰撞的风险的碰撞风险。在碰撞风险等于或者高于设定值并且因此存在碰撞可能性的情况下,微型计算机12051经由音频扬声器12061或者显示部12062向驾驶员发出警告,并且通过驱动系统控制单元12010执行强制减速或者规避转向。微型计算机12051从而能够协助驾驶以避免碰撞。
成像部12101至成像部12104中至少一者可以是检测红外线的红外相机。微型计算机12051可以例如通过确定成像部12101至成像部12104成像的图像中是否存在行人来识别行人。例如,对行人的这种识别是通过如下步骤执行的:提取作为红外相机的成像部12101至成像部12104的成像图像中的特征点的步骤;以及对一系列代表物体轮廓的特征点进行模式匹配处理以确定是否是行人的步骤。如果微型计算机12051确定在成像部12101至成像部12104的成像图像中存在行人,并因此识别出了行人,则声音图像输出部12052控制显示部12062以使得用于强调的方形轮廓线被显示为叠加在识别的行人上。此外,声音图像输出部12052还可以控制显示部12062,以便在需要的位置显示代表行人的图标等。
以上已经说明了可以应用本发明的技术的车身控制系统的示例。根据本发明的技术可以应用到上述部件中的成像部12031。具体地,成像装置100可以应用于成像部12301。将本发明的技术应用到成像部12031使得能够获取具有较少噪声的高清晰度拍摄图像并且因此在车身控制系统中使用拍摄的图像执行高精度控制。
(内窥镜手术系统的实际应用示例)
根据本发明的技术(本技术)可以应用于各种产品。例如,根据本发明的技术可以应用于内窥镜手术系统。
图33是示出了可以应用根据本发明的实施例的技术(本技术)的内窥镜手术系统的示意性配置的示例的视图。
在图33中,示出了外科大夫(医生)11131正在使用内窥镜手术系统11000为在病床11133上的患者11132执行手术的状态。如图所示,内窥镜手术系统11000包括内窥镜11100、其它手术工具11110(例如气腹管11111和能量装置11112)、支撑臂装置11120(在其上支撑内窥镜11100)和推车11200,用于内窥镜手术的各种装置装载在推车11200上。
内窥镜11100包括镜筒11101和连接至镜筒11101的近端的摄像头11102,镜筒11101具有从其远端起预定长度的用于插入患者11132的体腔的区域。在所说明的示例中,内窥镜11100被说明为包括作为具有硬型的镜筒11101的刚性内窥镜。然而,内窥镜11100也可以是包括作为具有柔性的镜筒11101的柔性内窥镜。
镜筒11101在其远端具有安装物镜的开口部。光源装置11203连接至内窥镜11100,使得由光源装置11203产生的光通过在镜筒11101内部延伸的光导而被引导至镜筒的远端并且通过物镜向患者11132体腔中的观察目标照射。需要注意的是,内窥镜11100可以是前视内窥镜,或者可以是斜视内窥镜或者侧视内窥镜。
在摄像头11102的内部设置有光学系统和摄像元件,使得来自观察目标的反射光(观察光)被光学系统聚集在摄像元件上。摄像元件对观察光进行光电转换,以产生与观察光相对应的电信号,即与观察图像相对应的图像信号。图像信号被作为原始数据传输到相机控制单元(CCU)11201。
CCU 11201包括中央处理单元(CPU)、图形处理单元(GPU)等,并且集中地控制内窥镜11100和显示装置11202的操作。另外,CCU 11201从摄像头11102接收图像信号,并且针对图像信号执行用于基于图像信号显示图像的各种图像处理,例如显影处理(去马赛克处理)。
显示装置11202在CCU 11201的控制下显示基于已由CCU 11201进行了图像处理的图像信号的图像。
光源装置11203包括诸如例如发光二极管(LED)等光源,并且在对手术区域等进行成像时向内窥镜11100提供照射光。
输入装置11204是用于内窥镜手术系统11000的输入接口。使用者可以通过输入装置11204执行输入到内窥镜手术系统11000的各种类型信息或指令的输入。例如,使用者将通过内窥镜11100输入指令等来改变图像拍摄条件(照射光的类型、放大率或焦距等)。
治疗工具控制装置11205控制用于烧灼或切开组织、密封血管等的能量装置11112的驱动。气腹装置11206通过气腹管11111将气体送入患者11132的体腔内以便对体腔充气,以确保内窥镜11100的视野并且确保外科大夫的工作空间。记录器11207是能够记录与手术有关的各种类型的信息的装置。打印机11208是能够以各种形式(例如文本、图像或图形)打印与手术有关的各种类型的信息的装置。
需要注意的是,将手术区域要被成像时的照射光提供至内窥镜11100的光源装置11203可以包括诸如包含LED、激光光源或者它们的组合的白光源。在白光源包括红、绿、蓝(RGB)激光光源的组合的情况下,因为可以高精度地控制各种颜色(各个波长)的输出强度和输出时序,所以可以由光源装置11203执行拍摄图像的白平衡调整。另外,在这种情况下,如果来自各个RGB激光光源的激光束分时地照射到观察目标上,并且与照射时序同步地控制摄像头11102的摄像元件的驱动,则也能够分时地摄取对应于R、G和B各者的图像。根据此方法,即使没有为摄像元件提供滤色器,也能够获得彩色图像。
另外,可以控制光源装置11203,使得要输出的光的强度每隔预定的时间改变。通过与光强度的改变的时序同步地控制摄像头11102的摄像装置的驱动从而分时地获取图像并且合成所述图像,能够创建没有曝光不足阴影和过曝高光的高动态范围的图像。
另外,光源装置11203可以被构造用于提供能够用于特殊光观察的预定波长带的光。在特殊光观察中,例如,通过利用人体组织中光吸收的波长依赖性照射与普通观察的照射光(即白光)相比更窄波段的光,进行以高对比度对预定组织(例如粘膜的表面的血管等)成像的窄带光观察。或者,在特殊光观察中,可以执行用于由通过激发光照射产生的荧光来获得图像的荧光观察。在荧光观察中,可以通过将激发光照射到身体组织上来观察来自身体组织的荧光(自体荧光观察)或者通过局部注射试剂(诸如吲哚菁绿(ICG))并且将与试剂的荧光波长对应的激发光照射到人体组织上获得荧光图像。光源装置11203可以被构造为提供适于上述的特殊光观察的窄带光和/或激发光。
图34是示出了图33中说明的摄像头11102和CCU 11201的功能配置的示例的框图。
摄像头11102包括透镜单元11401、摄像单元11402、驱动单元11403、通信单元11404和摄像头控制单元11405。CCU 11201包括通信单元11411、图像处理单元11412和控制单元11413。摄像头11102和CCU 11201通过传输电缆11400彼此连接以进行通信。
透镜单元11401是设置在与镜筒11101的连接位置处的光学系统。从镜筒11101的远端摄取的观察光被引导到摄像头11102并且被引入到透镜单元11401中。透镜单元11401包括包含变焦透镜和聚焦透镜的多个透镜的组合。
摄像单元11402包含的摄像元件的数量可以是一个(单板型)或者是多个(多板型)。例如,在摄像单元11402被配置为多板型的成像单元的情况下,通过摄像元件生成与R、G和B的各者相对应的图像信号,并且可以合成图像信号以获得彩色图像。摄像单元11402还可以被构造为具有用于分别获取用于右眼的图像信号和用于左眼的图像信号的一对摄像元件,从而用于三维(3D)显示。如果执行3D显示,则外科大夫11131能够更准确地理解手术区域中活体组织的深度。应当注意的是,在摄像单元11402被配置为立体型的成像单元的情况下,与各个摄像元件相对应地设置有透镜单元11401的多个系统。
此外,摄像单元11402不是必须设置在摄像头11102上。例如,可以在镜筒11101内部的紧挨着物镜后面设置摄像单元11402。
驱动单元11403包含致动器,并且在摄像头控制单元11405的控制下,沿光轴以预定距离移动透镜单元11401的变焦透镜和聚焦透镜。因此,能够适当地调整由摄像单元11402拍摄的图像的放大率和焦点。
通信单元11404包括用于发送各种类型的信息到CCU 11201和接收来自CCU 11201的各种类型信息的通信装置。通信单元11404通过传输电缆11400将从摄像单元11402获取的图像信号作为RAW数据发送到CCU 11201。
另外,通信单元11404从CCU 11201接收用于控制摄像头11102的驱动的控制信号,并将该控制信号提供给摄像头控制单元11405。控制信息包括诸如与摄像条件相关的信息,例如指定拍摄图像的帧率的信息、指定拍摄图像时的曝光值的信息和/或指定拍摄图像的放大倍数和焦点的信息。
应当注意的是,诸如帧率、曝光值、放大倍数或焦点等的图像拍摄条件可以由用户指定或者可以由CCU 11201的控制单元11413基于获得的图像信号自动设置。在后一种情况下,内窥镜11100包括了自动曝光(AE)功能、自动聚焦(AF)功能和自动白平衡(AWB)功能。
摄像头控制单元11405基于通过通信单元11404接收到的来自CCU11201的控制信号控制摄像头11102的驱动。
通信单元11411包含用于发送各种类型的信息到摄像头11102和接收来自摄像头11102的各种类型的信息的通信装置。通过传输电缆11400,通信单元11411接收从摄像头11102向其发送的图像信号。
此外,通信单元11411向摄像头11102发送用于控制摄像头11102的驱动的控制信号。图像信号和控制信号可以通过电通信、光通信等传输。
图像处理单元11412对从摄像头11102向其发送的RAW数据形式的图像信号执行各种图像处理。
控制单元11413执行与由内窥镜11100对手术区域等的摄像和通过对手术区域等的摄像而获得的拍摄图像的显示相关的各种类型的控制。例如,控制单元11413创建用于控制摄像头11102的驱动的控制信号。
此外,控制单元11413基于已经由图像处理单元11412进行了图像处理的图像信号控制显示装置11202显示对手术区域等成像的被摄图像。因此,控制单元11413可以使用各种图像识别技术来识别所拍摄图像中的各种对象。例如,控制单元11413可以通过检测包含在拍摄图像中的对象的边缘的形状、颜色等来识别例如镊子等手术工具、特定的活体区域、出血、当使用能量装置11112时的雾等等。当控制单元11413控制显示装置11202显示拍摄的图像时,控制单元11413可以使用识别的结果使得以与手术区域的图像交叠的方式显示各种类型的手术支持信息。当以交叠的方式显示手术支持信息并且呈现给外科大夫11131时,能够减轻外科大夫11131的负担,并且外科医生11131可以确信地进行手术。
将摄像头11102和CCU 11201彼此连接的传输电缆11400是能够用于电信号通信的电信号电缆、能够用于光通信的光纤或者能够用于电通信和光通信的复合电缆。
这里,虽然在所说明的示例中,通过使用传输电缆11400的有线通信来执行通信,但是也可以通过无线通信来执行摄像头11102和CCU11201之间的通信。
以上已经说明了可以应用根据本发明的技术的内窥镜手术系统的示例。在上述部件中,根据本发明的技术可以有利地应用于设置于内窥镜11100的摄像头11102的摄像单元11402。将根据本发明的技术应用于摄像单元11402能够使摄像单元11402的尺寸更小或清晰度更高,并且因此能够提供尺寸小或清晰度高的内窥镜11100。
尽管上面已经参考实施方案和变形例1至变形例11以及应用示例和实际应用示例说明了本发明,但是本发明不限于上述实施方案等。各种变形是可行的。例如,在各个单位像素P的片上透镜14的下方,例如可以设置红色滤色器、绿色滤色器、蓝色滤色器。红色滤色器透射红色波长范围内的光。绿色滤色器透射绿色波长范围内的光。蓝色滤色器透射蓝色波长范围内的光。例如,在像素部100A中可以设置诸如设置为具有规则颜色排列(例如,拜耳排列)的滤色器等光学部件。
需要注意的是,本说明书所述的效果仅仅是说明性的,但是不限于所述。可以有其他效果。
应当注意的是,本发明还可以具有如下构造。根据具有以下构造的本技术,在多层配线层内的区域中光反射层设置。所述多层配线层设置在第一半导体基板的与第一面相对的第二面侧。所述第一半导体基板包括针对各个像素的光接收部。所述第一面用作光入射面。所述第二面包括多个结构物。在所述区域中,没有形成任何所述结构物。所述光反射层具有反射区域或非反射区域,层间绝缘层夹在它们之间。所述反射区域或所述非反射区域相对于像素的光学中心基本对称。因此,使得被光反射层反射而再次进入光接收部的光相对于入射角而言基本均匀。这使得能够提高图像质量。
(1)
一种成像元件,包括:
半导体基板,其具有第一面和第二面,所述第一面用作光入射面,所述第二面与所述第一面相对,所述半导体基板针对各个像素包含光接收部,所述光接收部通过光电转换产生电荷,所述电荷对应于接收的光的光量;
多层配线层,其设置在所述半导体基板的所述第二面侧,所述多层配线层中堆叠有多个配线层,在所述多个配线层之间布置有层间绝缘层;
多个结构物,其在所述半导体基板的所述第二面上设置在所述多层配线层内;和
光反射层,其设置在所述多层配线层内,所述光反射层在未形成有所述结构物的区域中形成有反射区域或非反射区域,在所述光反射层与所述反射区域或所述非反射区域之间夹设有所述层间绝缘层,所述反射区域相对于所述像素的光学中心基本对称,所述非反射区域相对于所述像素的所述光学中心基本对称。
(2)
根据(1)所述的成像元件,其中,所述光反射层形成为相对于所述像素的所述光学中心基本对称。
(3)
根据(1)或(2)所述的成像元件,其中,所述光反射层具有开口。
(4)
根据(3)所述的成像元件,其中,所述开口形成为基本对称,所述开口包括所述像素的所述光学中心。
(5)
根据(1)至(4)中任一项所述的成像元件,其中,所述多个结构物被布置为在平面图中在所述像素中是不对称的。
(6)
根据(1)至(5)中任一项所述的成像元件,包括:
作为所述像素的第一像素和第二像素,所述第一像素和所述第二像素彼此相邻,其中,
所述光反射层通过使用所述第一像素与所述第二像素之间的区域作为中心而被形成为是基本对称的。
(7)
根据(6)所述的成像元件,其中,所述第一像素和所述第二像素共用多个结构物的一部分。
(8)
根据(1)至(7)中任一项所述的成像元件,其中,所述光反射层设置为在平面图中与所述多个结构体的一部分重叠。
(9)
根据(1)至(8)中任一项所述的成像元件,其中,所述多个结构物包括:浮动扩散部、传输晶体管、复位晶体管、放大晶体管和选择晶体管,所述浮动扩散部执行电荷电压转换以将所述光接收部产生的信号电荷转换成电压信号,所述传输晶体管将所述光接收部产生的所述信号电荷传输至所述浮动扩散部,所述复位晶体管将所述浮动扩散部的电位复位为预定电位,所述放大晶体管用作由所述浮动扩散部保持的所述电压信号的输入部,所述选择晶体管控制来自所述放大晶体管的所述电压信号的输出时序。
(10)
根据(8)或(9)所述的成像元件,还包括电荷保持部作为所述多个结构物,所述电荷保持部是针对各个所述像素设置的,所述电荷保持部累积由所述光接收部产生的所述电荷。
(11)
根据(1)至(10)中任一项所述的成像元件,其中,所述光反射层在与所述半导体基板的所述第二面相面对的面上具有凹凸结构。
(12)
根据(11)所述的成像元件,其中,所述凹凸结构具有相对于所述光学中心基本对称的形状。
(13)
根据(1)至(12)中任一项所述的成像元件,还包括在所述半导体基板的所述第二面的上方的光反射控制层,所述光反射控制层在平面内具有不同的折射率。
(14)
根据(13)所述的成像元件,其中,所述光反射控制层通过使用具有彼此不同折射率的超材料形成。
(15)
根据(13)或(14)所述的成像元件,其中,所述光反射层由超透镜构成。
(16)
根据(1)至(15)中任一项所述的成像元件,其中,所述半导体基板在所述第二面上具有凹凸结构。
(17)
根据(16)所述的成像元件,其中,所述半导体基板具有作为所述凹凸结构的弯曲部,所述弯曲部相对于所述光学中心基本对称。
(18)
根据(16)或(17)所述的成像元件,其中,在所述凹凸结构的表面上形成有反射膜。
(19)
根据(1)至(18)中任一项所述的成像元件,还包括像素部,在所述像素部中以矩阵形式二维地布置有多个像素,其中,
在所述像素部中包含的所述多个像素中设置的光反射层被形成为使得所述反射区域或所述非反射区域中的至少一者相对于所述像素的所述光学中心从所述像素部的中央朝向外围部偏移。
(20)
根据(1)至(19)中任一项所述的成像元件,其中,所述光反射层形成为包含金属材料。
(21)
根据(1)至(20)中任一项所述的成像元件,其中,通过使用电介质多层膜来形成所述光反射层。
(22)
根据(1)至(21)中任一项所述的成像元件,其中,所述光反射层由堆叠的所述多个配线层之中的被设置为最靠近所述半导体基板的所述第二面侧的配线层形成,在所述配线层与所述半导体基板之间夹设有所述层间绝缘层。
(23)
一种成像装置,包括:
成像元件,包括:
半导体基板,其具有第一面和第二面,所述第一面用作光入射面,所述第二面与所述第一面相对,所述半导体基板针对各个像素均包含光接收部,所述光接收部通过光电转换产生电荷,所述电荷对应于接收的光的光量;
多层配线层,其设置在所述半导体基板的所述第二面侧,所述多层配线层中堆叠有多个配线层,在所述多个配线层之间布置有层间绝缘层;
多个结构物,其在所述半导体基板的所述第二面上设置在所述多层配线层内;和
光反射层,其设置在所述多层配线层内,所述光反射层在未形成有所述结构物的区域中形成有反射区域或非反射区域,在所述光反射层与所述反射区域或所述非反射区域之间夹设有所述层间绝缘层,所述反射区域相对于所述像素的光学中心基本对称,所述非反射区域相对于所述像素的光学中心基本对称。
本申请要求2020年5月29日向日本专利局提交的日本专利申请第2020-095062号的优先权,并将其全部内容通过引用并入本申请中。
本领域技术人员应当理解的是,只要在所附权利要求或其等同物的范围内,根据设计要求和其他因素可以进行各种变形、组合、子组合和替换。
- 图像拾取元件、成像装置及成像方法
- 光学成像元件及光学成像元件制造方法
- 环形光学元件、成像镜头模块与电子装置
- 目镜式成像光学装置和头戴式成像光学设备及其制造方法和成像方法
- 成像元件、层叠型成像元件、成像装置以及成像元件的制造方法
- 成像元件、成像元件的制造方法、成像装置以及成像装置的制造方法