一种腕关节训练机器人
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及康复训练技术领域,具体涉及一种腕关节训练机器人。
背景技术
人体关节中活动最灵活,使用最频繁的关节之一就是腕关节,很容易因为意外或者间接暴力和过度牵拉造成关节周围韧带、肌肉和关节囊等软组织的损伤,当然,可能会因为患病而导致上肢及腕关节处的功能障碍。
现有的手腕部康复器械缺少患者训练运动数据检测,无法准确掌握患者训练过程中腕关节训练的状态变化以使训练效果最优化。
发明内容
本发明的目的在于克服现有技术中的缺点与不足,提供一种腕关节训练机器人。
本发明的一个实施例提供一种腕关节训练机器人,包括:机架和依序设置在机架上的手臂托、掌屈背伸训练组件和尺偏桡偏训练组件;
所述掌屈背伸训练组件包括转动座、第一动力组件和第一角度传感器,所述转动座设置在所述机架上,所述第一动力组件驱动所述转动座转动,所述第一角度传感器与所述第一动力组件连接,在患者使用时,所述转动座的旋转轴线穿过患者的腕关节;
所述尺偏桡偏训练组件包括摆臂、握把、第二动力组件和第二角度传感器,所述摆臂与所述转动座转动连接,其旋转轴线垂直于所述转动座的旋转轴线,所述握把设置在所述摆臂上,所述第二动力组件驱动所述摆臂转动,所述第二角度传感器与所述第二动力组件连接。
相对于现有技术,本发明的腕关节训练机器人能够检测患者手腕部的运动数据,获取腕关节最大的转动角度,有助于监控患者的康复情况和定制康复训练计划。
进一步,所述机架上设置有第一导向件,所述第一导向件朝所述转动座延伸,所述手臂托活动设置在所述第一导向件上。便于适应不同长度手臂的支撑。
进一步,所述摆臂上设置有第二导向件,所述第二导向件朝所述转动座延伸,所述握把活动设置在所述第二导向件上。因为转动座的旋转轴线穿过腕关节处,便于适应不同大小的手。
进一步,所述转动座上设置有基座和平衡块,所述基座和所述平衡块相对于所述转动座的旋转轴线对称;
所述摆臂与所述基座转动连接,所述第二动力组件设置在所述基座上。便于转动座平衡以及便于摆臂的设置,优化结构。
进一步,所述手臂托和所述转动座沿一轴线布置,所述握把位于所述轴线的一侧。手臂自然放置时,手掌和手指围绕握住的部位是偏移在手臂轴线的一侧的,所以握把设置在所述轴线一侧能够适应人体手部握紧握把。
进一步,所述尺偏桡偏训练组件还包括支撑板,所述支撑板设置在所述摆臂上,其朝所述轴线延伸。该结构便于握把的支撑和握把位置的固定。
进一步,所述握把与所述支撑板转动连接。该设计便于手部转动握把。
进一步,所述握把朝背离所述手臂托的方向倾斜布置。该设计适应手部自然握住时的角度。
进一步,所述腕关节训练机器人还包括前臂旋转训练组件,所述手臂托、所述前臂旋转训练组件、所述掌屈背伸训练组件和尺偏桡偏训练组件依序设置在所述机架上;
所述前臂旋转训练组件包括支撑座和绑带,所述支撑座与所述机架转动连接,所述绑带设置在所述手臂托上,用于固定患者的前臂。该设计能够训练前臂的转动。
进一步,所述前臂旋转训练组件还包括第三动力组件,所述第三动力组件设置在所述机架上,驱动所述支撑座转动。动力组件驱动支撑座转动,使得患者能够进行被动训练。
为了能更清晰的理解本发明,以下将结合附图说明阐述本发明的具体实施方式。
附图说明
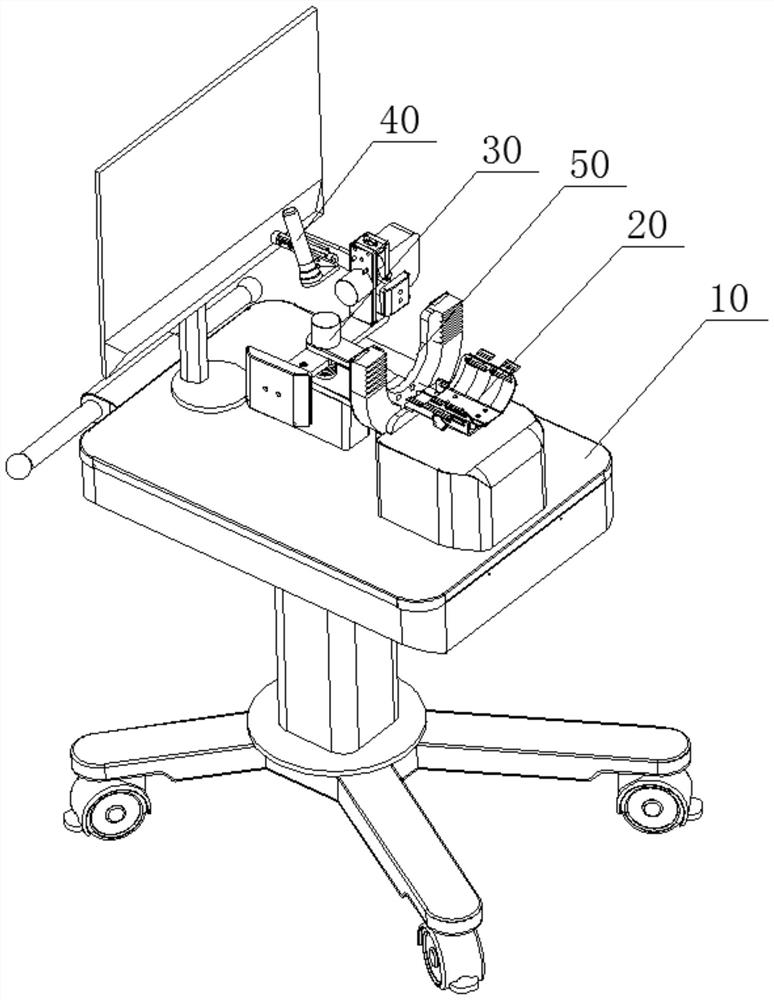
图1为本发明一个实施例的腕关节训练机器人的结构示意图;
图2为图1所示的掌屈背伸训练组件、尺偏桡偏训练组件和前臂旋转训练组件的结构示意图;
图3为图1所示的腕关节训练机器人的一侧的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,其是本发明一个实施例的腕关节训练机器人的结构示意图,该腕关节训练机器人,包括:机架10和依序设置在机架10上的手臂托20、掌屈背伸训练组件30和尺偏桡偏训练组件40。
请参阅图2,其是图1所示的掌屈背伸训练组件、尺偏桡偏训练组件和前臂旋转训练组件的结构示意图,所述掌屈背伸训练组件30包括转动座31、第一动力组件32和第一角度传感器33,所述转动座31设置在所述机架10上,所述第一动力组件32驱动所述转动座31转动,所述第一角度传感器33与所述第一动力组件32连接,在患者使用时,转动座31的旋转轴线穿过患者的腕关节;所述尺偏桡偏训练组件40包括摆臂41、握把42、第二动力组件43和第二角度传感44器,所述摆臂41与所述转动座31转动连接,所述握把42设置在所述摆臂41上,所述第二动力组件43驱动所述摆臂41转动,所述第二角度传感44器与所述第二动力组件43连接;所述转动座31的旋转轴线垂直于所述摆臂41的旋转轴线。角度传感器可检测患者碗关节的转动角度,获取患者腕关节能够转动的最大角度,对患者在所述最大角度范围内进行被动训练。需要说明的是,第一动力组件32和第二动力组件43可以根据实际需要来选择,例如减速电机等。
在一些可选的实施方式中,所述机架10上设置有第一导向件11,所述第一导向件11朝所述转动座31延伸,所述手臂托20活动设置在所述第一导向件11上。需要说明的是,第一导向件11可以根据实际需要选择合适的设计,例如第一导向件11可以是导轨、导向槽、导杆等,在手臂托20上设置与第一导向件11匹配的滑块等结构即可。
在一些可选的实施方式中,所述摆臂41上设置有第二导向件411,所述第二导向件411朝所述转动座31延伸,所述握把42活动设置在所述第二导向件411上。需要说明的是,第一导向件11可以根据实际需要选择合适的设计,例如第二导向件411可以是导轨、导向槽、导杆等,在握把42上设置与第二导向件411匹配的滑块等结构即可。
在一些可选的实施方式中,所述转动座31上设置有基座311和平衡块312,所述基座311和所述平衡块312相对于所述转动座31的旋转轴线对称;所述摆臂41与所述基座311转动连接,所述第二动力组件43设置在所述基座311上。基座311便于支撑摆臂41转动。
请参阅图3,其是图1所示的腕关节训练机器人的一侧的结构示意图,在一些可选的实施方式中,所述手臂托20和所述转动座31沿一轴线布置,所述握把42位于所述轴线的一侧,优选的,摆臂41的旋转轴线垂直于所述轴线。
在一些可选的实施方式中,所述尺偏桡偏训练组件40还包括支撑板45,所述支撑板45设置在所述摆臂41上,其朝所述轴线延伸。
在一些可选的实施方式中,所述握把42与所述支撑板45转动连接,便于手部握住握把42移动时能够减少手部与握把42的摩擦。
在一些可选的实施方式中,所述握把42朝背离所述手臂托20的方向倾斜布置,通常握把42是竖直布置的,但是由于手部结构及手指长度不同,握把42朝人体前倾斜更方便握住,适应人体的结构。
在一些可选的实施方式中,所述腕关节训练机器人还包括前臂旋转训练组件50,所述手臂托20、所述前臂旋转训练组件50、所述掌屈背伸训练组件30和尺偏桡偏训练组件40依序设置在所述机架10上;所述前臂旋转训练组件50包括支撑座51和绑带52,所述支撑座51与所述机架10转动连接,利用摩擦旋动患者前臂,所述绑带52设置在所述手臂托20上,用于固定患者的前臂。优选的,所述支撑座51上设置有U型凹槽511,用于放置患者的前臂,所述绑带设置在所述U型凹槽511处。
在一些可选的实施方式中,所述前臂旋转训练组件50还包括第三动力组件53,所述第三动力组件53设置在所述机架10上,驱动所述支撑座51转动,能够实现患者的被动训练。需要说明的是,第三动力组件53可以根据实际需要来选择,例如减速电机等。
相对于现有技术,本发明的腕关节训练机器人能够检测患者手腕部的运动数据,获取腕关节最大的转动角度,有助于了解患者的康复情况和定制康复训练计划。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种上肢康复训练机器人及其腕关节训练装置
- 一种腕关节训练驱动装置和腕关节训练设备