一种基于单车不良驾驶行为风险的路网风险评估方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及交通安全技术领域,尤其是涉及一种基于单车不良驾驶行为风险的路网风险评估方法。
背景技术
随着社会现代化的不断发展,汽车逐渐成为人们日常生活中不可或缺的交通工具。频繁发生的交通事故使得交通安全成为社会关注的焦点,而驾驶员作为道路交通系统中的操控者与决策者,其在行车过程中的驾驶表现可显著影响交通事故发生的频率与其后果严重性,尤其对于驾驶员的不良驾驶行为,其一直以来被公认为是诱发交通事故的主要影响因素。目前,针对驾驶员的研究主要是针对单车进行分析,即依据车辆所处的交通环境、驾驶员信息、车辆属性信息等判断驾驶员的风险水平,该类研究方法以驾驶员个体为研究对象,为驾驶辅助系统提供理论依据,且为驾驶员提供警示作用,从而降低驾驶员的行车风险。
现有的驾驶员驾驶行为研究未针对不良驾驶行为展开细致研究,对于驾驶员是否出现不良驾驶行为情形下的风险评估准则的一致性判断结果,可能会导致驾驶员的风险水平判断出现误差。此外,在实际应用中,作为道路交通系统中的一名参与者,驾驶员希望尽可能避免高风险的驾驶场景,从而降低自己行车过程中的风险,而以单车为研究对象的风险评估难以获取行驶轨迹中的路段与路网风险。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于单车不良驾驶行为风险的路网风险评估方法,该方法可实时度量路网的交通事故风险,改善行驶轨迹中的路段与路网风险的获取准确度和便利性。
本发明的目的可以通过以下技术方案来实现:
一种基于单车不良驾驶行为风险的路网风险评估方法,包括如下步骤:
S1:采集预设时间窗内的驾驶员信息数据、路网交通数据、路网环境数据和路网数据作为原始数据。
采集的预设时间窗内的驾驶员信息数据包括驾驶员驾龄、驾驶员驾驶里程、驾驶员的驾驶车辆类型、驾驶员驾驶风格、驾驶员不良驾驶行为发生频率、驾驶员不良驾驶行为类型、驾驶员历史交通事故数据、车辆行驶速度和车辆行驶加速度,采集的预设时间窗内的路网交通数据包括路网中各路段的交通流量、路段的饱和度、路段中车辆的平均速度、路段中车辆速度的变异系数和路段中各类型车辆的百分比。采集的预设时间窗内的路网环境数据包括天气条件和土地利用类型,采集的预设时间窗内的路网数据包括路网中各路段的长度、路段的交通事故率、路段的道路等级、路段的车道数量、路段的速度限制、路段形状曲率和路段坡度。
S2:对采集的驾驶员信息数据、路网交通数据、路网环境数据和路网数据中的非数值型数据进行标准化,获取驾驶员数据特征集、交通数据特征集、环境数据特征集和路网数据特征集。具体地:
对采集的驾驶员信息数据、路网交通数据、路网环境数据和路网数据中的非数值型数据,首先进行离散化处理,然后采用归一化方法进行标准化,得到驾驶员数据特征集、交通数据特征集、环境数据特征集和路网数据特征集。
S3:构建单车风险评估模型,计算单车风险水平。
通过车辆的受力平衡关系,推导车辆的速度与加速度关系,基于加速度与速度关系模型构建单车风险评估模型,在速度与加速度的平面中,车辆的加速度与速度之间呈现二次函数关系,若驾驶员的行驶轨迹点分布在该二次函数曲线外部,则表明其处于不安全的驾驶状态,若驾驶员的行驶轨迹点分布在该二次函数曲线的内部,则表示车辆处于事故概率低的相对安全的驾驶状态。
S4:利用熵权方法的多层次评价方法建立路段风险评估模型,获取预设时间窗下的路网中各个路段的风险水平。具体步骤包括:
41)综合考虑驾驶员因素、道路因素、交通环境、自然环境、不良驾驶行为因素,以驾驶技能、道路车道数量、道路等级、交通流组成、交通流特性、天气、不良驾驶行为类型、不良驾驶行为发生次数作为风险评估指标,利用熵权方法确定各项风险评估指标的权重;
42)通过路段风险评估指标的评价矩阵,依据熵权方法确定的各项风险评估指标的权重,获取预设时间窗下的路网中各个路段的风险水平。
S5:基于单车风险评估模型与路段风险评估模型的输出结果,构建出行路径的风险评估模型,获取路网风险水平。具体地:
利用单车风险与路段风险之间的关系构建风险矩阵图,根据风险矩阵图划分路网风险等级,并根据路段风险值、路径包含的路段数以及路径中的各路段的权重,获取出行路径的风险值。
出行路径的风险值的计算式为:
式中,R为出行路径的风险值,l
相较于现有技术,本发明方法弥补了现有驾驶员驾驶行为在其不良驾驶状态研究的不足,将驾驶员的不良驾驶行为与单车风险紧密结合,即基于单车风险水平,结合路网数据特征集、交通数据特征集、环境数据特征集、驾驶员数据特征集,得出路网的风险水平,并进行分级,建立的路网风险评估模型可实时度量路网的交通事故风险,计算驾驶员各出行路径的风险水平,从而改善行驶轨迹中的路段与路网风险的获取准确度和便利性,且能够为驾驶员的路径选择提供更加准确的基础依据。
附图说明
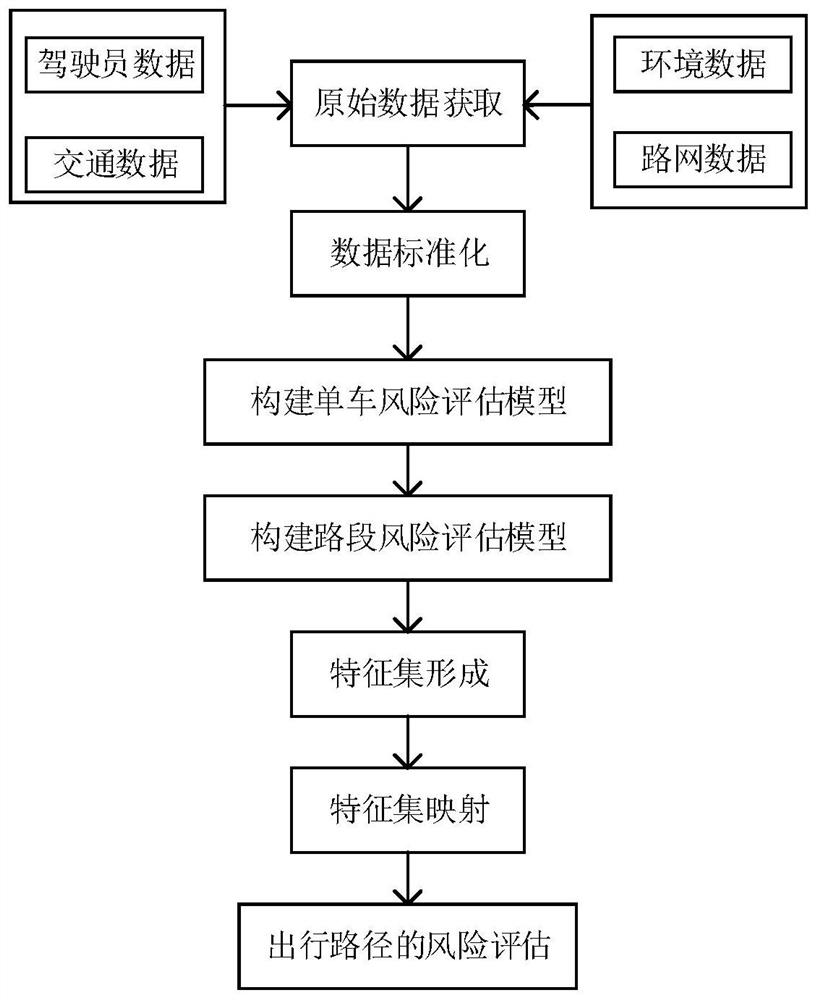
图1为实施例中基于单车不良驾驶行为风险的路网风险评估方法的流程示意图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
实施例
如图1所示,本发明涉及一种基于单车不良驾驶行为风险的路网风险评估方法,具体步骤如下:
步骤一:数据集的获取。
采集预设时间窗内的路网中驾驶员信息数据,形成驾驶员数据集。采集的驾驶员信息数据包括:驾驶员驾龄、驾驶员驾驶里程、驾驶员的驾驶车辆类型、驾驶员驾驶风格、驾驶员不良驾驶行为发生频率、驾驶员不良驾驶行为类型、驾驶员历史交通事故数据、车辆行驶速度和车辆行驶加速度。
采集预设时间窗内的路网中交通数据,形成交通数据集。采集的交通数据包括:路网中各路段的交通流量、路段的饱和度、路段中车辆的平均速度、路段中车辆速度的变异系数和路段中各类型车辆的百分比。
采集预设时间窗内的路网中环境数据,形成环境数据集。采集的环境数据包括:天气条件(例如:雨天、雪天、雾天、晴天)、土地利用类型(例如:居民用地、商业用地、工业用地、农业用地等)。
采集预设时间窗内的路网数据,形成路网数据集。采集的路网数据包括:路网中各路段的长度、路段的交通事故率、路段的道路等级、路段的车道数量、路段的速度限制、路段形状曲率和路段坡度。
步骤二:标准化数据,形成数据特征集。
采集到的数据包括数值型数据以及非数值型数据。
首先将非数值型数据,如驾驶员数据集中车辆类型、驾驶员驾驶风格、驾驶员不良驾驶行为类型数据进行离散化评分。然后采用归一化方法(min-max、z-score)对驾驶员数据集、交通数据集、环境数据集以及路网数据集中的其他连续数据进行标准化,得到标准化后的驾驶员数据特征集、交通数据特征集、环境数据特征集以及路网数据特征集。
本步骤标准化分为三种:
对于“成本型”指标,即越小越好型指标无量纲化的标准函数为:
式中,y′
对于“效益型”指标,即越大越好型指标无量纲化的标准函数为:
对于既不属于“成本型”也不属于“效益型”的数据的标准函数为:
其中μ为平均值,σ为标准差。
本发明中,驾驶员数据集中驾驶员不良驾驶行为发生频率、驾驶员历史交通事故数据,路网数据中的路段交通事故率等属于“成本型”指标,属性值越小越好,采用第一种函数标准化;路网数据集中路段速度限制属于“效益型”指标,则采用第二种函数进行标准化处理;剩余指标采用z-score方法进行标准化处理。
步骤三:风险评估模型的建立。
构建单车风险评估模型,计算单车风险水平。利用熵权方法的多层次评价方法获取路段风险评估模型,计算预设时间窗下的路网中各个路段的风险水平。
其中,构建单车风险评估模型,计算单车风险水平的具体内容为:
通过车辆的受力平衡关系,推导车辆的速度与加速度关系,基于加速度与速度关系模型构建单车风险评估模型。
车辆的加速度
已知向心力和车辆的重量互相平衡,其中,向心力与车辆轮胎和路面的侧摩擦力有关,因此可以得出阻抗力F
轮胎受力的饱和度是物理约束,其会影响车辆的动力性与机动性。考虑到极限条件(F
通过阻抗力与摩擦力关系,进一步化简可以得到
圆周代表不良驾驶行为是否容易发生事故的边界。在实践中,当存在横向与纵向加速度时,合成加速度不应超过可能导致发生事故的上限。描述不良驾驶行为事故概率的界限μ
其中V为车辆速度。
μ
通过μ的极限值可得到加速度a的极限值,进一步化简可以得到加速度与速度之间的函数表达式。
在速度与加速度的平面中,随着车辆速度的不断提高,加速度呈缓慢降低的趋势,车辆的加速度与速度之间呈现二次函数关系,若驾驶员的行驶轨迹点分布在该二次函数曲线外部,则表明其处于不安全的驾驶状态,易发生事故,而内部的行驶轨迹点表示事故概率低的相对安全的驾驶状态。根据车辆速度与加速度画出g-g图,根据行驶轨迹点落在二次函数曲线内部的比例,结合驾驶员三种驾驶风格类型,获取安全域外部所占行驶轨迹点的三个百分比阈值:第一个值代表谨慎型驾驶行为,第二个值代表一般型驾驶行为,第三个值代表激进型驾驶行为。随着驾驶员驾驶风格激进程度的增加,其安全域外部的行驶轨迹点占比也随之提高,进而可判断驾驶员不良驾驶行为的风险等级。计算不同驾驶风格对应的第一个四分位数,确定风险阈值,最后将风险水平划分为低风险、一般风险、高风险、较高风险四个等级。
路段的风险评估模型可采用基于熵权方法的多层次评价方法。综合考虑驾驶员因素、道路因素、交通环境、自然环境、不良驾驶行为因素,以驾驶技能、道路车道数量、道路等级、交通流组成、交通流特性、天气、不良驾驶行为类型、不良驾驶行为发生次数作为风险评估指标。利用熵权方法确定各项风险评估指标的权重。
假设多层次评价指标矩阵为M:
式中,x
用P
第j个指标的熵值e
式中,k>0,e
将定义差异系数d
d
因此通过熵值法确定的第j个指标的权重W
通过路段风险评估指标的评价矩阵M(m
C=M×T
基于风险评价值C,采用Fisher最优分割法对风险水平进行分级,得到低、一般、高、较高四种路段风险等级。
步骤四:路网风险评估。
基于单车风险评估模型与路段风险评估模型结果,采取风险矩阵模型计算出行路径的风险评估模型。风险矩阵可以表示为单车风险与路段风险的乘积关系,利用单车风险与路段风险之间的关系构建风险矩阵图,与风险水平的高低成正比。引入风险带,风险带是以横坐标P(单车风险水平)和纵坐标C(路段风险水平)所构成的二维平面封闭区域,本实施例以4个单车风险水平、4个路段风险水平进行二位曲面封闭区域划分说明,划分方式如下:
上述中,利用A、B、C、D分别表示不同样色的等级划分,在本实施例中,可将A、B、C、D分别设置为红色、橙色、黄色、蓝色。红色、橙色、黄色、蓝色的风险等级依次为Ⅰ、Ⅱ、Ⅲ、Ⅳ级,根据综合风险评价等级将风险分别定义为:Ⅰ级风险—较低风险,Ⅱ级风险—一般风险,Ⅲ级风险—较高水平,Ⅳ级风险—严重风险。
计算路网风险水平,为驾驶员提供路网中最低风险水平的路径选择。
假设驾驶员出行路径的起点为A,终点为Z,其可选择的出行路径有4条:
则出行路径的风险值R为:
式中,R为出行路径的风险值,l
获取各个出行路径的风险值,风险值越大,表示该出行路径的风险水平越高。通过计算各出行路径的风险值,为驾驶员提供路径出行的选择。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种基于单车不良驾驶行为风险的路网风险评估方法
- 一种基于单车不良驾驶行为风险的路网风险评估方法