同侧双舵轮驱动 AGV的同步控制系统及方法
文献发布时间:2023-06-19 09:35:27
技术领域
本发明涉及AGV技术领域,尤其涉及同侧双舵轮驱动 AGV的同步控制系统及方法。
背景技术
AGV,全称Automated Guided Vehicle,一般应用于物流系统或工厂内,用于根据用户指令自动将货物运送到目的地。AGV采用同侧双舵轮驱动的方式,在完全正向或者反向运动时,因为两个轮子完全在同一个直线上运行,两轮子需要实现完全的速度同步,不然会存在一个轮子拖着另一个轮子行驶的问题,导致其中一个电机的电流一直处于很高的状态,容易损坏电机。即使给两个电机一样的速度值,由于摩擦力、负载不是完全均衡等因素,两个电机的实际速度没办法达到一致。
发明内容
鉴于目前现有技术的不足,本发明的目的在于提供一种前后轮可以完全同步的同侧双舵轮驱动 AGV的同步控制系统及方法。
为达到上述目的,本发明的实施例采用如下技术方案:
一种同侧双舵轮驱动 AGV的同步控制系统,所述控制系统包括:
AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动AGV行驶;
所述AGV上还设有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。
进一步,所述AGV上还设有激光导航装置,所述激光导航装置与所述控制器配合对所述AGV进行导航控制。
进一步,所述AGV上设有两个前轮和两个后轮,所述两舵轮分别位于同侧一前轮和一后轮。
进一步,所述扭矩检测器为所述驱动器自带或独立设置。
一种同侧双舵轮驱动 AGV的同步控制方法,所述控制方法包括:
配置AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动AGV行驶;
所述AGV上还配置有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。
进一步,所述AGV上还设有激光导航装置,所述激光导航装置用于与所述控制器配合对所述AGV进行导航控制。
进一步,所述AGV上设有两个前轮和两个后轮,所述两舵轮分别位于同侧一前轮和一后轮。
进一步,所述扭矩检测器为所述驱动器自带或独立设置。
本发明所述同侧双舵轮驱动 AGV的同步控制系统及方法,包括:AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动AGV行驶;所述AGV上还设有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。因为控制器根据扭矩检测器反馈的两个舵轮驱动电机的实际扭矩,计算出差值,进而实时调整两个驱动器的速度设定值,比如当前轮比后轮快时,则将前轮调慢,将后轮调快;反之,当前轮比后轮慢时,则将前轮调快,将后轮调慢。如此,可持续消除两驱动器的扭矩不平衡的状态,保证两个电机同步运行,进而起到保护电机和AGV稳定运行的目的。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
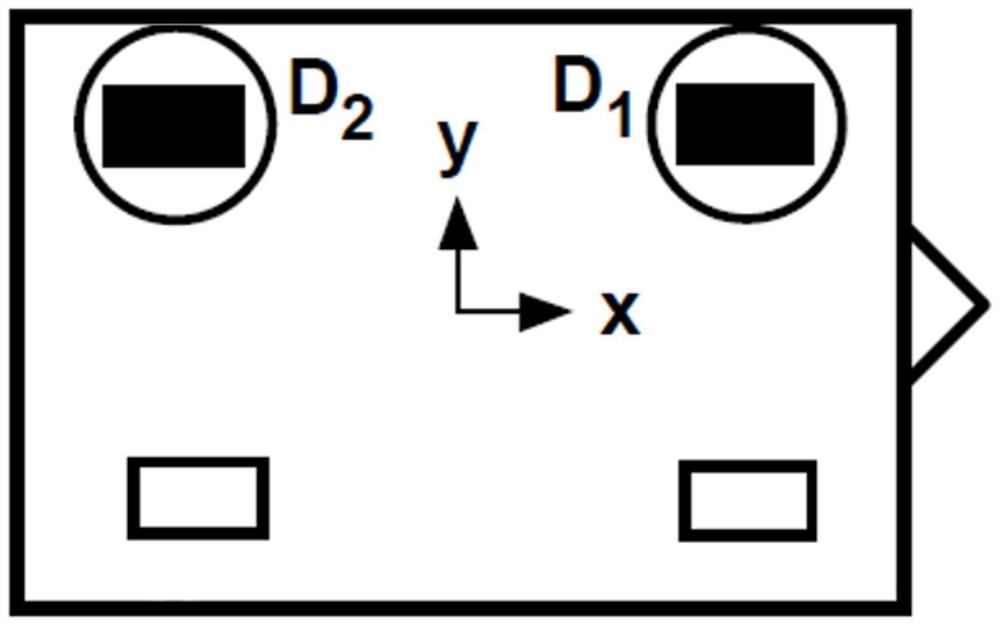
图1为本发明一实施方式一种同侧双舵轮驱动 AGV的同步控制系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参见图1所示,为本发明一实施方式一种同侧双舵轮驱动 AGV的同步控制系统的结构示意图。所述同侧双舵轮驱动 AGV的同步控制系统,包括:AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动AGV行驶;所述AGV上还设有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。控制器根据扭矩检测器反馈的两个舵轮驱动电机的实际扭矩,计算出差值,进而实时调整两个驱动器的速度设定值,,若后轮驱动电机的实际扭矩比前轮驱动电机的实际扭矩大,则判断后轮比前轮快了。反之亦然,扭矩大的电机,速度比另一个更快。比如当前轮比后轮快时,则将前轮调慢,将后轮调快;反之,当前轮比后轮慢时,则将前轮调快,将后轮调慢。如此,可持续消除两驱动器的扭矩不平衡的状态,保证两个电机同步运行,进而起到保护电机和AGV稳定运行的目的。
进一步,所述AGV上还设有激光导航装置,所述激光导航装置与所述控制器配合对所述AGV进行导航控制。
其中,所述AGV上设有两个前轮和两个后轮,所述两舵轮分别位于同侧一前轮和一后轮。
进一步,所述扭矩检测器为所述驱动器自带或独立设置。若驱动器自身有扭矩检测功能,就用驱动器自身检测到的实际扭矩;若没有就另外设置独立的扭矩检测器。
本发明还提供一种同侧双舵轮驱动 AGV的同步控制方法,包括:配置AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两舵轮,带动AGV行驶;所述AGV上还配置有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。控制器根据扭矩检测器反馈的两个舵轮驱动电机的实际扭矩,计算出差值,进而实时调整两个驱动器的速度设定值,,若后轮驱动电机的实际扭矩比前轮驱动电机的实际扭矩大,则判断后轮比前轮快了。反之亦然,扭矩大的电机,速度比另一个更快。比如当前轮比后轮快时,则将前轮调慢,将后轮调快;反之,当前轮比后轮慢时,则将前轮调快,将后轮调慢。如此,可持续消除两驱动器的扭矩不平衡的状态,保证两个电机同步运行,进而起到保护电机和AGV稳定运行的目的。
进一步,所述AGV上还设有激光导航装置,所述激光导航装置用于与所述控制器配合对所述AGV进行导航控制。
在一具体实施例中,所述AGV上设有两个前轮和两个后轮,所述两舵轮分别位于同侧一前轮和一后轮,如图1中D1、D2所示。
进一步,所述扭矩检测器为所述驱动器自带或独立设置。若驱动器自身有扭矩检测功能,就用驱动器自身检测到的实际扭矩;若没有就另外设置独立的扭矩检测器。
本发明所述同侧双舵轮驱动 AGV的同步控制系统及方法,包括:AGV,其上设有控制器、两个驱动器、两个舵轮,所述控制器控制两个驱动器,两个驱动器分别驱动两个舵轮,带动AGV行驶;所述AGV上还设有扭矩检测器,检测两个舵轮驱动电机的实际扭矩反馈给所述控制器;所述控制器根据所述两个舵轮驱动电机的实际扭矩的差值,进行闭环控制,实时调整两个舵轮的速度设定值。控制器根据扭矩检测器反馈的两个舵轮驱动电机的实际扭矩,计算出差值,进而实时调整两个驱动器的速度设定值,,若后轮驱动电机的实际扭矩比前轮驱动电机的实际扭矩大,则判断后轮比前轮快了。反之亦然,扭矩大的电机,速度比另一个更快。比如当前轮比后轮快时,则将前轮调慢,将后轮调快;反之,当前轮比后轮慢时,则将前轮调快,将后轮调慢。如此,可持续消除两驱动器的扭矩不平衡的状态,保证两个电机同步运行,进而起到保护电机和AGV稳定运行的目的。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本领域技术的技术人员在本发明公开的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
- 同侧双舵轮驱动 AGV的同步控制系统及方法
- 一种针对双舵轮式AGV舵轮零偏的校准方法及系统