一种伺服阀零漂的确定及补偿方法
文献发布时间:2023-06-19 09:49:27
技术领域
本发明属于液压伺服控制领域,具体涉及一种伺服阀零漂的确定及补偿方法,是用于确定伺服阀零漂并对控制回路进行补偿的方法。
背景技术
现代液压伺服系统通常由控制器、伺服阀、液压缸组成。系统工作正常时,液压伺服阀都不可避免的存在零漂现象,即液压伺服阀处于零位时的实际零点与控制信号的零点不相同。两个零点之间的误差经过多个控制周期的积累会形成较大误差,从而影响液压伺服系统的控制精度。
造成零漂的原因可能是使用的伺服阀本身存在零点漂移;可能是各环节电子元器件的长时间使用,参数发生变化;可能是电源电压不稳;也可能是生产现场环境恶劣,在系统实际运行过程中,伺服阀的实际零点也会随着环境温度等外部条件的变化而变化。
现有技术中,液压伺服系统零漂的解决方法有:提高伺服阀的质量,减少本身的零偏和零漂或在运行之前,调节系统的零位处于零点,但以上两点都具有很大局限性;有零漂产生时,给伺服阀一个相反的电压信号,抑制这个微小的电压信号使其不能变大,抑制零漂;在轧机液压缸上安装位移传感器、油压传感器和伺服阀,通过高速数据采集模块读取液压缸的位移检测和油压信号,计算液压伺服阀零漂补偿量,控制伺服阀开口度进行液压缸位置闭环调节的动态补偿;根据液压压下模式以及测量设备是否故障确定积分重置信号无效且积分使能信号有效时,积分伺服阀控制信号并限幅输出将积分后的限幅输出值叠加到伺服阀控制信号上并输出至伺服阀,补偿伺服阀实际零点同伺服阀控制信号。但是以上几种方法相对比较复杂,同时很难保证液压伺服系统具有较快的响应速度和较高的控制精度。
发明内容
针对上述技术问题,本发明提供了一种伺服阀零漂的确定及补偿方法,所述方法能够解决现有液压控制系统中因存在零漂现象而影响液压伺服系统的闭环控制精度的技术问题。
本发明是通过以下技术方案实现的:
一种伺服阀零漂的确定及补偿方法,利用上一时刻的伺服阀零漂值与当前时刻控制器输出电流值确定当前时刻的伺服阀零漂值,并通过自学习对当前时刻的伺服阀零漂值不断进行修正;将获取的当前时刻的伺服阀零漂值补偿到控制器输出上,以提高液压伺服系统中液压缸双向动作的一致性,提高液压伺服控制系统的闭环控制精度。
进一步地,所属方法包括以下步骤:
步骤一:获取油压正常情况下,处于闭环控制中的液压伺服系统工作正常时的控制器输出电流值;
步骤二:液压伺服系统处于空载状态时,利用上一时刻的伺服阀零漂值与当前时刻控制器输出电流值确定当前时刻的伺服阀零漂值,伺服阀零漂值与控制器输出电流值之间的关系公式为:
Z(n)=(1-α)×Z(n-1)+α×I(n)
式中:I(n)与Z(n)分别表示n时刻控制器输出电流值和n时刻伺服阀零漂值,有载状态时零漂值保持不变;Z(n-1)表示n-1时刻伺服阀零漂值;α为调节系数;零漂值会随着时间的变化,产生一些轻微变化,通过调整调节系数α,就可以确定当前时刻零漂值大小。
步骤三:确定调节系数α,α取值在0~0.02之间;
步骤四:将获取的当前时刻的伺服阀零漂值补偿到控制器输出上,实现系统闭环控制精度的提高。
进一步地,在步骤一中,液压伺服系统工作正常且处于空载状态时,在无零漂补偿装置条件下,控制器输出电流值等于伺服阀给定电流值。
进一步地,在步骤二中,液压伺服系统处于空载状态时,通过自学习对伺服阀零漂值不断进行修正;液压伺服系统处于有载状态时,伺服阀零漂值保持不变。
本发明的有益技术效果:
本发明所述方法利用上一时刻的伺服阀零漂值与当前时刻控制器输出电流值确定当前时刻的伺服阀零漂值;通过自学习方法对伺服阀零漂值不断进行修正,将获取到的伺服阀零漂值补偿到控制器输出,可提高液压伺服系统中液压缸双向动作的一致性,防止一个方向调节范围过小影响该方向的动作速度。本发明提出的方法不需要增加新的设备,即可提高液压伺服控制系统的闭环控制精度。
附图说明
图1为本发明实施例中液压系统控制框图;
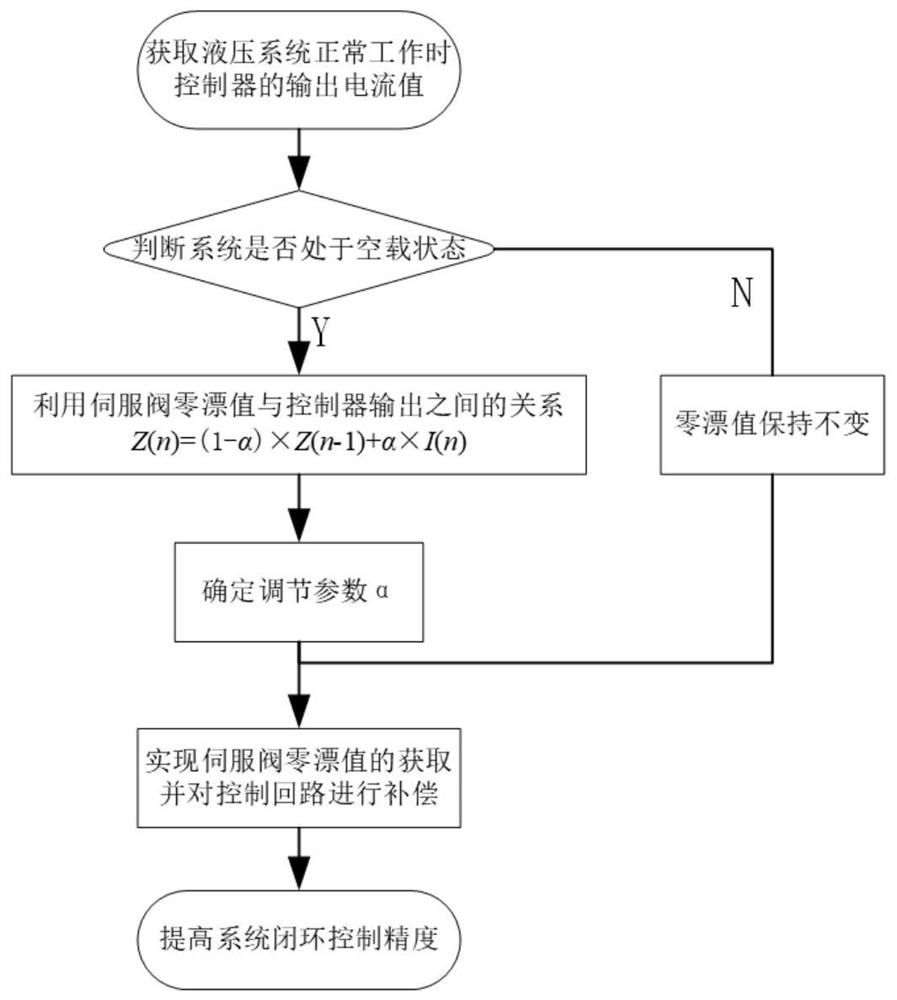
图2为本发明实施例中伺服阀零漂值获取步骤示意图;
图3为本发明实施例中伺服阀给定电流仿真图;
图4为本发明实施例中伺服阀零漂值仿真图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细描述。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
本发明实施例提供一种伺服阀零漂的确定及补偿方法,通过自学习方法利用伺服阀零漂值与控制器输出电流值实现伺服阀零漂值的获取,将其补偿到控制器输出,可实现液压伺服系统闭环控制精度的提高。
具体地,利用上一时刻的伺服阀零漂值与当前时刻控制器输出电流值确定当前时刻的伺服阀零漂值,并通过自学习对当前时刻的伺服阀零漂值不断进行修正;将获取的当前时刻的伺服阀零漂值补偿到控制器输出上,以提高液压伺服系统中液压缸双向动作的一致性,提高液压伺服控制系统的闭环控制精度。
如图2所示,所述方法包括以下步骤:
步骤一:获取油压正常情况下,处于闭环控制中的液压伺服系统工作正常时的控制器输出电流值;确定n时刻控制器输出电流值与伺服阀零漂值分别用I(n)和Z(n)表示;
步骤二:液压伺服系统处于空载状态时,利用伺服阀零漂值与控制器输出电流值之间的关系公式Z(n)=(1-α)×Z(n-1)+α×I(n)计算零漂值。式中:I(n)和Z(n)分别表示n时刻控制器输出电流值和n时刻伺服阀零漂值,有载状态时伺服阀零漂值保持不变;Z(n-1)表示n-1时刻伺服阀零漂值;α为调节系数;
在本实施例中,上一时刻(即n-1时刻)伺服阀零漂值Z(n-1)为0mA,当前时刻控制器输出的电流值I(n)为0.5mA。
步骤三:确定调节系数α,α取值在0~0.02之间;在本实施例中调节系数α取0.01;
在本实施例中,可以得出当前时刻伺服阀零漂值Z(n)为0.005mA,即确定了液压伺服阀在实际零点输出电流为0.005mA的位置,大于0.005mA时伺服阀伸出,小于0.005mA时伺服阀收缩。下一时刻的零漂值再根据上述关系公式自学习对该零漂值不断进行修正,以跟随伺服阀零漂的缓慢变化,仿真出来的结果如图4所示。
步骤四:如图1所示,将获取的当前时刻的伺服阀零漂值补偿到控制器输出上,使系统零漂值变化幅度更小,提高了液压伺服系统中液压缸双向动作的一致性,从而提高液压伺服控制系统的闭环控制精度。
具体地,在步骤一中,液压伺服系统工作正常且处于空载状态时,在无零漂补偿装置条件下,控制器输出电流值等于伺服阀给定电流值,实际生产中的伺服阀给定电流如图3所示。
具体地,在步骤二中,液压伺服系统处于空载状态时,通过自学习对伺服阀零漂值不断进行修正;液压伺服系统处于有载状态时,伺服阀零漂值保持不变。
本发明实施例提供的方法在油压正常情况下,若处于闭环控制中的液压伺服系统工作正常且处于空载状态,可利用过去一段时间的伺服阀控制电流值得出当前时刻的零漂值,并通过自学习对该零漂值不断进行修正,以跟随伺服阀零漂的缓慢变化;其他情况下零漂值保持不变。将获取的零漂值补偿到控制器输出上,可提高液压伺服系统中液压缸双向动作的一致性,防止一个方向调节范围过小,影响该方向的动作速度,能够有效提高液压伺服系统的闭环控制精度。
- 一种伺服阀零漂的确定及补偿方法
- 一种轧机液压伺服阀零漂补偿方法及装置