多目标光电搜索方法及装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明属于光电设备领域,尤其涉及一种多目标光电搜索方法及装置。
背景技术
光电搜索跟踪系统是一种重要的对空目标探测装置,利用目标的红外特性探测跟踪目标,能提供全景监视能力,能在夜间或能见度较差的情况下搜索目标,提高系统对空中、地面及海面威胁目标的感知能力。
在目标的搜索跟踪过程中,由于目标的大小尺寸、机动特性和外观特征等不同,多个目标可能发生交叉和遮挡的情况。对于如何锁定多个目标并跟踪多个目标移动,实时获取多个目标运动图像、提取目标方位、俯仰、形态和距离等信息,现有技术通常采用红外探测器、可见光探测器、激光探测器三合一的方式实现,利用方位俯仰两轴两框架系统实现探测器的旋转与运动,采用图像跟踪系统实现目标检测与识别,采用激光测距机获取目标的距离。
然而,现有技术的光电搜索跟踪系统在搜索到多个目标后,需要手动从中选择一个目标进行跟踪,获取目标实时图像信息、方位、俯仰及距离信息。同时,在搜索时也只能针对目标进行静态的识别与分析,实现某一时刻的多目标检测,并没有把目标的运动状态、航路轨迹进行记录与分析,无法实现多目标建航搜索,并且识别错误率较高、虚警率高。搜索到目标后,只能选择其中一个目标进行跟踪,并对跟踪的目标建立航路轨迹,无法实现多目标跟踪。
因此,有必要提供一种能够对同一探测空域的多帧图像进行融合分析处理,降低探测错误概率与虚警率,同时能够建立可靠的目标航迹的多目标光电搜索方法及装置来解决上述问题。
发明内容
针对现有技术存在的不足,本发明的目的在于提供一种能够对同一探测空域的多帧图像进行融合分析处理,降低探测错误概率与虚警率,同时能够建立可靠的目标航迹的多目标光电搜索方法及装置。
为实现上述目的,本发明提供了如下技术方案:
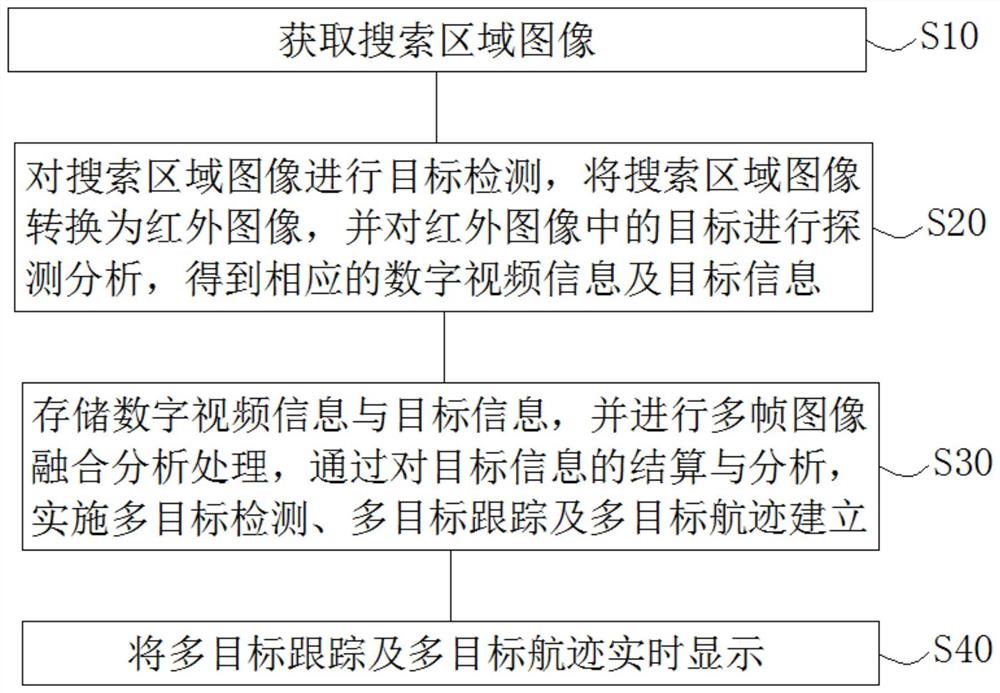
一种多目标光电搜索方法,具体包括如下步骤:
步骤S10、获取搜索区域红外图像;
步骤S20、对所述搜索区域红外图像进行目标检测,将所述搜索区域红外图像进行转换并对所述红外图像中的目标进行探测分析,得到相应的数字视频信息及目标信息;
步骤S30、存储所述数字视频信息与所述目标信息,并进行多帧图像融合分析处理,通过对所述目标信息的解算与分析,实施多目标检测、多目标跟踪及多目标航迹建立;
步骤S40、将所述多目标跟踪及多目标航迹实时显示。
优选的,步骤S20包括如下子步骤:
步骤S21、背景抑制,利用目标与背景的图像特性差异进行分析处理,用于抑制起伏背景,提高目标信杂比,增加目标的可检测性;
步骤S22、真实目标检测,对经抑制的背景进行目标检测,通过对序列图像的处理,剔除高频噪声干扰,实现对背景中存在的红外运动小目标的真实检测。
优选的,步骤S20还包括设置于步骤S21前的步骤S23、目标区域提取,通过探测图像中天地交界区域来确定目标所在天空区域,排除地面杂波干扰;及
设置于所述步骤S22之后的步骤S24、虚警剔除目标确认,进一步通过目标与背景及杂波的形状、运动特性差异剔除虚警并确认真实目标。
优选的,步骤S20还包括设置于所述步骤S24之后的步骤S25、航迹可信度评估,通过对经虚警剔除的真实目标进行跟踪形成真实目标的航迹,并将所述航迹与之前的航迹信息进行对比,
若所述航迹大于之前航迹的确认概率TA,则认为是正确航迹;
若所述航迹小于之前航迹的确认概率TB,则认为是错误航迹;
若所述航迹处于之前航迹的概率TA与TB之间,则对该航迹所对应的目标重新进行步骤S24进行确认和剔除。
优选的,在步骤S30中,多目标航迹的建立采用递归、累计、关联系数的方式进行建立。
优选的,在步骤S10中,采用双DSP进行多目标搜索。
一种多目标光电搜索装置,包括:
转塔,所述转塔包括激光测距机、位置编码器、双轴光纤陀螺及至少两个红外热像仪,用于获取搜索区域红外图像;
图像信号处理箱,所述图像信号处理箱与所述转塔通信连接,并用于将所述搜索区域红外图像进行转换并对红外图像中的目标进行探测分析,得到相应的数字视频信息及目标信息;
信息处理计算机,所述信息处理计算机与所述图像信号处理箱通信连接,并用于多帧图像融合分析处理,利用所述数字视频信息及所述目标信息实现多目标跟踪及目标航迹建立;
显控计算机,所述显控计算机与所述信息处理计算机通信连接,并用于将多目标跟踪及多目标航迹实时显示。
优选的,所述图像信号处理箱包括:
背景抑制模块,所述背景抑制模块利用目标与背景的图像特性差异进行分析处理,用于抑制起伏背景,提高目标信杂比,增加目标的可检测性;及
目标检测模块,所述目标检测模块对经抑制的背景进行目标检测,通过对序列图像的处理,剔除高频噪声干扰,实现对背景中存在的红外运动小目标的真实检测。
优选的,所述图像信号处理箱还包括目标区域提取模块及虚警剔除目标确认模块,所述目标区域提取模块、所述背景抑制模块、所述目标检测模块及所述虚警剔除目标确认模块依次通信连接;
所述目标区域提取模块用于探测图像中天地交界区域以确定目标所在天空区域,排除底面杂波的干扰,所述虚警剔除目标确认模块用于进一步通过目标与背景及杂波的形状、运动特性差异剔除虚警并确认真实目标。
优选的,所述转塔还包括第一数字信号处理器及第二数字信号处理器,所述第一数字信号处理器与所述第二数字信号处理器配合所述激光测距机、所述位置编码器及多个所述红外热像仪进行多目标搜索。
综上所述,与现有技术相比,本发明提供的多目标光电搜索方法,通过对同一探测空域的多帧图像进行融合分析处理,降低探测错误概率与虚警率,同时,通过多帧图像融合分析处理,增加了目标内在的一致性,能够同时为每个目标建立目标航迹;通过在现有单目标跟踪的基础上,通过目标航迹的建立实现对多个目标的跟踪,通过目标航迹的外推与插补算法,提供目标准确的方位、俯仰信息。
附图说明
图1为本发明提供的多目标光电搜索方法的流程框图;
图2为本发明提供的多目标光电搜索方法中步骤S20的子步骤流程框图;
图3为本发明提供的多目标光电搜索装置的结构框图;
图4为本发明提供的多目标光电搜索装置中第一数字信号处理器与第二数字信号处理器的使用交互图。
图中,100、多目标光电搜索装置;10、转塔;11、激光测距机;12、位置编码器;13、双轴光纤陀螺;14、红外热像仪;15、第一数字信号处理器;16、第二数字信号处理器;20、图像信号箱;21、背景抑制模块;22、目标检测模块;23、目标区域提取模块;24、虚警剔除目标确认模块;30、信息处理计算机;40、显控计算机。
具体实施方式
下面结合附图和实施例,对本发明进行详细描述。下述实验例和实施例用于进一步说明但不限于本发明。
请结合参阅图1与图2,本发明提供了一种多目标光电搜索方法,具体的包括如下步骤:
步骤S10、获取搜索区域红外图像;其中,为了避免现有技术中探测错误率大及虚警率高的现象发生,在本实施方式中,采用多帧图像进行融合分析处理,以降低探测错误概率与虚警率。
同时,为了提升所述搜索区域红外图像获取的视场角,在本实施方式中,设置多个红外探测器同时作业,以增加红外探测器的视场,从而满足后续多目标搜索简历目标航迹的需求。
步骤S20、对所述搜索区域红外图像进行目标检测,将所述搜索区域红外图像进行转换并对所述红外图像中的目标进行探测分析,得到相应的数字视频信息及目标信息;
其中,步骤S20包括如下子步骤:
步骤S23、目标区域提取,通过探测图像中天地交界区域来确定目标所在天空区域,排除地面杂波干扰;
步骤S21、背景抑制,利用目标与背景的图像特性差异进行分析处理,用于抑制起伏背景,提高目标信杂比,增加目标的可检测性;
步骤S22、真实目标检测,对经抑制的背景进行目标检测,通过对序列图像的处理,剔除高频噪声干扰,实现对背景中存在的红外运动小目标的真实检测。
步骤S24、虚警剔除目标确认,进一步通过目标与背景及杂波的形状、运动特性差异剔除虚警并确认真实目标;
步骤S25、航迹可信度评估,通过对经虚警剔除的真实目标进行跟踪形成真实目标的航迹,并将所述航迹与之前的航迹信息进行对比,
若所述航迹大于之前航迹的确认概率TA,则认为是正确航迹;
若所述航迹小于之前航迹的确认概率TB,则认为是错误航迹;
若所述航迹处于之前航迹的概率TA与TB之间,则对该航迹所对应的目标重新进行步骤S24进行确认和剔除。
步骤S30、存储所述数字视频信息与所述目标信息,并进行多帧图像融合分析处理,通过对所述目标信息的解算与分析,实施多目标检测、多目标跟踪及多目标航迹建立;
优选的,在本步骤中,多目标航迹的建立采用递归、累计、关联系数的方式进行建立。对目标的航迹进行可信度的评估,以及对目标的航迹进行预测,基于航迹可行度的评估后,可根据可信度的阙值,进行错误航迹的删除和正确航迹的确认,同时剔除虚警目标,可靠性更高。
步骤S40、将所述多目标跟踪及多目标航迹实时显示。
请参阅图3与图4,本发明还提供了一种多目标光电搜索装置100。所述多目标光电搜索装置100包括转塔10、与所述转塔10通信连接的图像信号处理箱20、与所述图像信号处理箱20通信连接的信息处理计算机30及显控计算机40。
所述转塔10包括激光测距机11、位置编码器12、双轴光纤陀螺13及至少两个红外热像仪14。所述激光测距机11、所述位置编码器12、所述双轴光纤陀螺13及多个所述红外热像仪14共同配合用于获取搜索区域红外图像。通过在所述转塔10设置至少两个所述红外热像仪14,增加了所述转塔10的探测视场,使其能够覆盖大部分目标运动空域。
具体的,在本实施方式中,所述红外热像仪14的数量为两个,两个所述红外热像仪14、所述激光测距机11、所述位置编码器12、所述双轴光纤陀螺13通过系统伺服控制完成全景搜索、扇区搜索、单目标跟踪、完成搜索空域的多目标定位信息提取和多目标跟踪信息处理等功能。
优选的,请具体参阅图3,在本实施方式中,所述转塔10还包括第一数字信号处理器15及第二数字信号处理器16。所述第一数字信号处理器15与所述第二数字信号处理器16配合所述激光测距机11所述位置编码器12、所述双轴光纤陀螺13及多个所述红外热像仪14进行多目标搜索,以实现双DSP进行多目标搜索。
在多目标检测过程中,所述第一数字信号处理器15及所述第二数字信号处理器16同时工作,使得同一探测空域内的多帧图像进行融合分析处理,有效降低了探测错误概率与虚警率。
所述图像信号箱20用于将所述搜索区域红外图像进行转换并对红外图像中的图像中的目标进行探测分析,得到相应的数字视频信息及目标信息。
具体的,所述图像信号箱20包括背景抑制模块21、目标检测模块22、目标区域提取模块23及虚警剔除目标确认模块24。所述目标区域提取模块23、所述背景抑制模块21、所述目标检测模块22及所述虚警剔除目标确认模块24依次通信连接。如此设置,通过采用多目标航迹确认和剔除、目标虚景剔除采用历史航迹的可信度递归累计方式,具有极低的虚景率,多目标探测的可靠性。
具体的,所述背景抑制模块21利用目标与背景的图像特性差异进行分析处理,用于抑制起伏背景,提高目标信杂比,增加目标的可检测性。
所述目标检测模块22对经抑制的背景进行目标检测,通过对序列图像的处理,剔除高频噪声干扰,实现对背景中存在的红外运动小目标的真实检测。
所述目标区域提取模块23用于探测图像中天地交界区域以确定目标所在天空区域,排除底面杂波的干扰。通过在所述背景抑制模块21前设置所述目标区域提取模块23,利于低空目标探测,避免了图像中地面背景杂波干扰及虚警出现的可能性,强化了中远距离空中弱目标探测的准确性。
所述虚警剔除目标确认模块24用于进一步通过目标与背景及杂波的形状、运动特性差异剔除虚警并确认真实目标。通过在所述目标检测模块23后设置所述虚警剔除目标确认模块24,能够进一步确认真实目标,避免目标检测23错误的发生。
所述信息处理计算机30用于多帧图像融合分析处理,利用所述数字视频信息及所述目标信息实现多目标跟踪及目标航迹建立。
所述显控计算机40用于将多目标跟踪及多目标航迹实时显示。
与现有技术相比,本发明提供的多目标光电搜索方法,通过对同一探测空域的多帧图像进行融合分析处理,降低探测错误概率与虚警率,同时,通过多帧图像融合分析处理,增加了目标内在的一致性,能够同时为每个目标建立目标航迹;通过在现有单目标跟踪的基础上,通过目标航迹的建立实现对多个目标的跟踪,通过目标航迹的外推与插补算法,提供目标准确的方位、俯仰信息。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和修饰,这些改进和修饰也应视为本发明的保护范围。
- 多目标光电搜索方法及装置
- 一种密集多目标的光电监测评估方法、装置及系统