用于确定人类大脑的感知负荷和刺激感知水平的系统和方法
文献发布时间:2023-06-19 09:54:18
技术领域
本公开涉及一种用于确定人类大脑的感知负荷,特别是由人类执行的预定任务(例如,驾驶汽车的任务)引起的感知负荷的系统和方法。本公开还涉及一种用于确定人类大脑对第二类型的刺激的感知水平,特别是对当人类执行预定任务(例如,驾驶汽车)时未被注意刺激的感知水平的系统和方法。
背景技术
通过提供用于使用警告信号的新设计和策略的基础来识别不可控的动态视觉环境的感知负荷及其变化(包括未被注意的事件)的能力可以显著改善安全性(例如,驾驶安全性)。它也可以设置一个标准,根据该标准,可以评估检测人类的注意力和参与度的其他度量(例如,生理度量,诸如,瞳孔或EEG(脑电图)测量)的有效性。此外,它还可以应用于设计用于高度自动化系统(例如,车辆)的人机(例如,车辆与驾驶员)交互的最佳策略,例如但不限于所谓的接管请求的情况,在该情况中,自动控制系统请求驾驶员重新控制车辆运行。
并非所有击中眼睛视网膜的信息都能被感知。信息是否被感知将取决于视觉皮层(纹状皮层和外纹皮层)中神经信号的强度。还可以确定,如果所关注的信息具有很高的感知负荷(即,在执行一项高要求任务的期间),那么人们可能不会在他们关注的重点之外感知信息(“视而不见”)。“视而不见”的这些影响被认为是事故的主要原因(例如,汽车碰撞和飞机坠毁等)。
人类处理感知信息的能力是有限的。因此,任务处理中感知负荷的水平是确定可以感知到什么刺激的重要因素。当感知负荷高时(例如,视觉场景拥挤时,或者必须做出更苛刻的感知决策时),由于没有多余的注意能力可用于他们的处理,因此关注焦点之外的刺激不太可能被注意到。在极端情况下,这可能会导致无意盲视(或失聪)现象,在这种情况下,由于缺乏感知资源,参与者完全无法感知刺激,请参阅:Cartwright-Finch U,Lavie N(2007)在认知102:321-340中的The role of perceptual load in inattentionalblindness(感知负荷在无意盲视中的作用)。
另一方面,在低负荷的情况下,当有可用容量时,它会自动“溢出”到与任务无关的刺激的感知上,从而增加了它们作为干扰因素的潜力,请参阅:Forster S,Lavie N(2008)在J Exp Psychol Appl 14:73–83中的Failures to ignore entirely irrelevantdistractors:The role of load(无法完全忽略无关的干扰因素:负荷的作用)。
fMRI已经被用来测量被注意任务处理的感知负荷对于对未被注意刺激的血管反应(BOLD反应)的影响,请参阅例如:
Rees G,Frith CD,Lavie N(1997)在科学278:1616–1619中的Modulatingirrelevant motion perception by varying attentional load in an unrelated task(通过改变无关任务中的注意力负荷来调节无关的运动感知),
Schwartz S,Vuilleumier P,Hutton C,Maravita A,Dolan RJ,Driver J(2005)在大脑皮层15:770–786中的Attentional load and sensory competition in humanvision:modulation of fMRI responses by load at fixation during task-irrelevant stimulation in the peripheral visual field(人类视觉中的注意力负荷和感觉竞争:在周围视野中与任务无关的刺激过程中,固定位置处的负荷对fMRI反应的调节),以及
Torralbo A,Kelley TA,Rees G,Lavie N(2016)在Sci Rep 6:33041中的Attention induced neural response trade-off in retinotopic cortex under load(在负荷下视网膜局部皮层中的注意力引起的神经反应权衡)。
然而,fMRI不是便携式的可穿戴技术,因此不允许与作为可穿戴系统存在的fNIRS相同的应用。EEG系统已用于测量感知负荷对于大脑对未被注意刺激的反应的影响(参见Parks NA,Beck DM,Kramer AF(2013)在Psychol 4:275中的Enhancement andsuppression in the visual field under perceptual load(在感知负荷下视野的增强和抑制))。但是,EEG对参与者的运动高度敏感,并且尽管便携,但其设置相当繁琐(例如,在某些系统配置中,需要在头部使用导电胶)。因此,它不太适合在实验室环境之外的实际应用。
响应于与感知负荷间接相关的认知因素,一些研究使用商业性fNIRS来测量血液中的氧合和脱氧水平(HbO
两种类型的负荷都与可导致“视而不见”(通常称为“无意盲视”)的影响的感知负荷无关。Zhang等人(2016)以及Kojima和Suzuki(2010)将HbO
Harasawa和Shiori在2011年发现了HbO
fMRI和可商购的fNIR二者从对血液氧合水平的测量间接推断出神经活动。一项研究使用fMRI(功能磁共振成像)测量血液氧合水平和血流量,以基于近似其他生理变量的模型来估计(而不是测量)视觉皮层中氧气的代谢率,该模型具有针对被注意和未被注意刺激条件的常数,请参阅:Moradi F,
Heekeren等人(1999)和Phan等人(2016a)使用开发的宽带fNIR来通过检测神经细胞中普遍存在并且指示神经氧代谢水平的线粒体中的细胞色素C氧化酶(OxCCO)的氧化水平来更直接地测量神经活动。他们将相对OxCCO水平与视觉刺激的存在相关联,请参阅:
Heekeren HR,Kohl M,Obrig H,Wenzel R,von Pannwitz W,Matcher SJ,DirnaglU,Cooper CE,Villringer A(1999)在J Cereb血流代谢19:592–603中的Noninvasiveassessment of changes in cytochrome-c oxidase oxidation in human subjectsduring visual stimulation(在视觉刺激过程中对人类受试者中的细胞色素C氧化酶氧化中的变化的非侵入性评估),以及
Phan P,Highton D,Brigadoi S,Tachtsidis I,Smith M,Elwell CE(2016a)在实验医学和生物学中的进展的第195–201页中的Spatial Distribution of Changes inOxidised Cytochrome C Oxidase During Visual Stimulation Using Broadband NearInfrared Spectroscopy Imaging(使用宽带近红外光谱成像进行视觉刺激时氧化细胞色素C氧化酶中的变化的空间分布)。
Kolyva等人(2012)和Phan等人(2016b)示出前额叶皮层中oxCCO的水平受认知任务的影响(例如,完成字谜解决任务对比休息的表现),请参阅:Kolyva C,Tachtsidis I,Ghosh A,Moroz T,Cooper CE,Smith M,Elwell CE(2012)在Biomed Opt Express 3:2550–2566中的Systematic investigation of changes in oxidized cerebral cytochrome coxidase concentration during frontal lobe activation in healthy adults(在健康成年人的前额叶激活过程中在氧化脑细胞色素c氧化酶浓度中的变化的系统研究),以及
Phan P,Highton D,Lai J,Smith M,Elwell C,Tachtsidis I(2016b)在BiomedOpt Express 7:4424中的Multi-channel multi-distance broadband near-infraredspectroscopy system to measure the spatial response of cellular oxygenmetabolism and tissue oxygenation(用于测量细胞氧代谢和组织氧合的空间响应的多通道多距离宽带近红外光谱系统)。
尽管在许多研究中使用一系列的神经成像技术研究了感知负荷的神经相关性,但是容量限制的来源仍有待理解。
发明内容
当前,仍然期望提供一种用于确定人类大脑的感知负荷的系统和方法。此外,仍然期望提供一种用于确定对人类大脑的刺激感知水平的系统和方法,特别是当人类大脑在人类执行预定任务(例如,驾驶任务)时感知(即,暴露于和/或接收来自其的信号)未被注意刺激时用于确定对人类大脑的刺激感知水平的系统和方法。
更特别地,期望具有一种便携式无创系统,其能够在驾驶(或执行另一预期任务)期间检测未被注意刺激的感知水平,尤其是其对运动的敏感性不如当前基于EEG的系统。与使用EEG的当前系统相比,这种系统可以更好地了解驾驶过程中驾驶员状态,因此可以更好地通知辅助汽车技术的发展。
如已经指出的,Heekeren等人(1999)和Phan等人(2016a)将视觉皮层中oxCCO的水平与视觉刺激的存在相关。Kolyva等人(2012)和Phan等人(2016b)示出前额叶皮层中oxCCO的水平受认知任务的影响(例如,完成字谜解决任务对比休息的表现)。但是,这些出版物都没有涉及注意力、感知和(更具体而言)感知负荷的认知神经科学,并且不能应用于测量和检测感知负荷:因为这需要在注意力的认知神经科学方面的专门知识。另一方面,认知神经科学中使用的技术无法测量神经代谢(相反,它们仅限于更间接地测量血液氧合和脱氧水平(HbO
因此,根据本公开的实施例,本公开涉及确定人类大脑的感知负荷的方法。感知负荷是由人类执行的预定(或预定义)任务(例如,在自动驾驶模式下驾驶汽车或其他非驾驶任务,例如看电影)引起的。该方法包括以下步骤:在执行任务时,使用功能性近红外光谱(fNIRS)传感器设备来测量人类大脑的代谢活动,以及根据代谢活动中被测量到的变化来确定感知负荷。
通过提供这样的方法,可以对包括所谓的感知负荷的认知状况进行移动的、运动弹性的(特别是实时或准实时)测量。
预定任务可包括引起相应变化感知负荷的变化复杂度。
所述复杂度也可被称为感知复杂度。特别地,预定任务可包括感知负荷的预定(或预定义)变化水平。
通常,在代谢活动变化超过预定量的情况下,关于任务中的感知负荷的变化,可确定人类大脑仍然能够感知任务和/或保持对任务的控制。换句话说,与负荷的任务变化相关的重大变化可指示人类大脑仍然能够感知任务和/或保持对任务的控制。
在例如复杂度增加并且同时在代谢活动中被测量到的变化未超过预定(或预定义)第一上限阈值的情况下,可确定由预定任务引起的感知负荷超过了感知负荷阈值和/或人类大脑未注意该任务。
在阈值由预定值表示或由大脑容量本身预定的意义上,期望阈值是预定的。在另一方面,预定阈值可由大脑感知负荷能力预定,但是所述预定阈值理想地低于人类大脑的最大负荷能力。
因此,在确定感知负荷超过预定阈值的情况下,感知负荷可能超过人类大脑的容量和/或甚至是对任务的无意盲视/失聪。
例如,在这种情况下,可以采取预防措施,例如,触发任何警报信号或激活接管驾驶控制的自动驾驶系统。
如果复杂度降低并且同时代谢活动中被测量到的变化未超过预定的(或预义定的)第一下限阈值,则可确定人类大脑未注意该任务。
因此,即使在所述任务具有降低的复杂度的情况下,也可确定人类是否关注任务(而不是困倦)。实施这种低复杂度任务也可被称为基准活动。然而,如果人类未注意该任务,则没有与所述任务相对应的代谢反应。换句话说,代谢活动不超过预定的(或预定义的)第一下限阈值。
一个示例可以是在自动驾驶期间正在观看驾驶场景的车辆乘客(意图成为驾驶员)。所述驾驶场景可提供空的或相对空的道路,即,具有降低复杂度的任务。使用本公开,可以检查乘客是否注意驾驶场景中的事件,例如道路标志。如果在发生事件(例如,通过道路标志)时未确定代谢活动超过预定的(或预定义的)第一下限阈值,则可确定该乘客未注意驾驶场景。
如果复杂度降低并且同时代谢活动中被测量到的变化没有降低到预定的(或预定义的)第一上限阈值以下,则可确定人类大脑未注意该任务。
如果降低了复杂度并且人类(例如,驾驶员)的大脑参与了该任务,那么人类的大脑代谢活动也预期被降低。如果它保持更高的水平,则可能意味着人类大脑从事了另一项任务,例如,驾驶员的大脑从事了非驾驶任务。通常,如果复杂度的变化超过某个阈值,并且代谢活动中的变化也没有超过某个阈值,则可以确定人类大脑未注意该任务。
因此,感知负荷过低的情况可能导致自动处理与任务无关的刺激(即,与任务无关的刺激的自动处理)。例如,人类大脑可能专注于其他任何事情,而不再给予该任务足够的关注。结果可能再次导致针对任务的无意盲视/失聪。
例如,在这种情况下,可采取预防措施,例如,触发任何警报信号以“唤醒”人类,即,将他/她的注意力重新吸引到任务上。
本公开还涉及确定人类大脑对第二类型的刺激的感知水平的方法。该方法包括以下步骤:
在第一时间段中,将人类大脑暴露于预定的(或预定义的)第一类型的刺激,响应于此,人类执行预定的(或预定义的)任务,从而在人类大脑中引起感知负荷,
在第二时间段中,将人类大脑暴露于预定的(或预定义的)第一类型的刺激以及人类大脑可感知的预定的(或预定义的)第二类型的刺激,
使用功能性近红外光谱(fNIRS)传感器设备测量第一时间段和第二时间段中人类大脑的代谢活动,以及
根据第二时间段中代谢活动中被测量到的相对于第一时间段的变化来确定第二类型的刺激的感知水平。
所述确定的感知水平可能既暗示实际感知第二类型的刺激的(肯定)情况,也暗示相反的,尽管在视场中,但是没有感知到第二刺激的任何东西(视而不见的情况)。例如,在感知水平为例如“0”的情况下,可以确定不存在感知。在例如感知水平为“100”的情况下,可以确定感知。
第一时间和第二时间可具有任何顺序和长度。它们也可以重复多次。
负荷测量可以被理解为连续的,只要存在具有第二类型的刺激的时间和不具有所述第二类型的刺激的时间即可。
通常,确定第二类型的刺激的感知水平的方法可以与确定人类大脑的感知负荷的方法的任何方面组合。
预定任务可以是驾驶任务。注意,根据本公开,驾驶任务在它包括预定任务(例如,转向,加速,制动等)的类型的意义上被理解为是预定的(或预定义的)。此外,还预先确定了人类为了执行驾驶任务而必须响应的刺激,即期望的刺激,例如道路的转弯,其他车辆等。
第一类型可以是主要任务类型,第二类型可以是次要任务类型。
换句话说,将要执行的任务可主要取决于第一类型的刺激(即,由主要任务类型的刺激所规定)。第二类型的刺激可能对将要执行的任务没有影响和/或可能只需要突然但及时的有限反应。在一个示例中,任务可能是开车(例如“下班后开车回家”),而次要刺激类型可能是行人的突然出现。例如,在行人没有过马路的情况下,其出现可能不会影响驾驶任务。无论如何,这是驾驶员注意行人的相关预防措施。
在另一示例中,在自动驾驶的情况下,任务可以是在车辆中观看电影,第一类型的刺激可以是所显示的电影,第二类型的刺激可以是行人的突然出现或车辆外部的驾驶场景中的任何其他事件。例如,车辆的自动驾驶系统可能会自主地对事件做出反应。无论如何,检查车辆乘客(和/或预期的驾驶员)是否也注意到了事件可能是一种预防措施。
如果在第二时间段中代谢活动中被测量到的相对于第一时间段的变化超过预定的(或预定义的)(第二上限)阈值,则可以确定第二类型的刺激的感知水平超过预定的最小感知水平。
例如,在这种情况下,无需采取预防行动,例如,触发任何警报信号或激活接管驾驶控制的自动驾驶系统。
如果在第二时间段中代谢活动中被测量到的相对于第一时间段的变化未超过预定的(或预定义的)阈值,则可以确定人类大脑未感知到第二类型的刺激和/或人类大脑未注意到第二类型的刺激。
例如,在这种情况下,可以采取预防行动,例如,触发任何警报信号或激活接管驾驶控制的自动驾驶系统。
该方法可以进一步包括以下步骤:生成将要由人类执行的预定任务和/或感测由人类执行的预定任务。
例如,在进行实验测试的情况下,预定任务可以被完整地生成。同样在驾驶任务的情况下,该任务可能部分地由车辆的运动(例如,速度和方向)生成/影响。无论如何,在驾驶任务的情况下,可例如使用不同的传感器(例如,光学传感器和速度传感器等)来感测所述任务。
该方法可以进一步包括以下步骤:将人类大脑暴露于特别是包括驾驶场景的第一类型的预定(或预定义)刺激中,响应于此,人类执行预定(或预定义)任务,该任务特别包括驾驶任务。
当执行任务时,第一类型的刺激可以被人类注意到。
例如,在将要执行的任务是驾驶任务的情况下,第一类型的刺激可以是驾驶场景的被注意刺激,例如道路的转弯,响应于此,人类不得不执行转向任务。
第二类型的刺激可以不是由任务预定的,从而当执行任务时它对于人类是未被注意的刺激。
例如,在将要执行的任务是驾驶任务的情况下,第二类型的刺激可以是驾驶场景的未被注意的刺激,例如,足球滚过马路。
已知大脑的总能量消耗基本上是恒定的,并且神经脉冲的生物能成本很高,因此需要有效利用可用资源。发明人已经发现:与高负荷(相对于低负荷)任务的附加处理要求相关联的能量消耗的增加为处理未被注意的刺激留下了更少的代谢资源。
第一类型的刺激可以是可变的(即,可以变化),以使得预定任务的复杂度相应地变化。
本公开进一步涉及一种用于确定人类大脑的感知负荷的系统。该系统包括:
功能性近红外光谱(fNIRS)传感器设备,其被配置为测量人类大脑的代谢活动中的变化,以及
控制设备,其被配置为基于代谢活动中被测量到的变化来确定感知负荷。
通常,所描述的系统可包括与上述方法特征相对应的一个或多个系统特征,特别是确定人类大脑的感知负荷的方法。
感知负荷可以是由人类执行的预定(或预定义)任务引起的。
系统可以进一步包括生成和/或传感设备,其被配置为生成将要由人类执行的预定(或预定义)任务和/或感测由人类执行的预定(或预定义)任务。
本公开进一步涉及一种用于确定人类大脑对刺激的感知水平的系统。该系统包括:
生成和/或传感设备,其被配置为:在第一时间段和第二时间段中,生成将要由人类执行的预定(或预定义)任务和/或感测由人类执行的预定(或预定义)任务,在第二时间段中,生成和/或感知人类大脑可感知的预定(或预定义)刺激,
功能性近红外光谱(fNIRS)传感器设备,其被配置为在第一时间段和第二时间段中测量人类大脑的代谢活动,以及
控制设备,其被配置为根据第二时间段中代谢活动中被测量到的相对于第一时间段的变化来确定刺激的感知水平。
所述刺激理想地对应于以上引用的方法中的“第二类型的刺激”。通常,所描述的系统可包括与上述方法特征相对应的一个或多个系统特征,特别是确定人类大脑对第二类型的刺激的感知水平的方法。
此外,所述系统也可以是所描述的用于确定人类大脑的感知负荷的系统,或者可以与后者组合。
生成和/或感测设备可被配置为生成第一类型的预定刺激并使人类大脑暴露于第一类型的预定刺激,响应于此,人类必须执行预定(或预定义)任务。
替代地或附加地,生成和/或传感设备可以被配置为感测由人类执行的预定(或预定义)任务。
宽带功能性近红外光谱(fNIRS)传感器设备可用于测试代谢活动中的变化。传感器设备可以被配置为除了监视氧合血红蛋白(HbO
在神经元激活过程中能量需求的增加大部分被线粒体中的氧化磷酸化所覆盖。因此,对oxCCO活性的测量能够监测代谢活动中的变化,该变化与神经反应过程中能量消耗的增加相关联。本公开内容使得能够直接比较在不同的感知负荷水平下由光学上相同的刺激引起的代谢活动。
功能性近红外光谱(fNIRS)传感器可被配置为测量指示细胞氧代谢的线粒体酶(特别是细胞色素C氧化酶(oxCCO))的氧化还原状态变化。
控制设备可被配置为基于指示细胞氧代谢的所测量的线粒体酶(特别是细胞色素C氧化酶(oxCCO))的所测量的氧化还原状态变化来确定感知负荷。
代谢活动中被测量到的变化可指示在人类大脑的神经反应期间能量消耗的增加。
功能性近红外光谱(fNIRS)传感器可进一步被配置为测量氧合血红蛋白(HbO
控制设备可被配置为基于所测量的氧合血红蛋白(HbO
功能性近红外光谱(fNIRS)传感器设备可被配置为测量人类大脑的内侧枕叶和/或右内侧枕回中的代谢活动中的变化。
控制设备可被配置为基于在内侧枕叶和/或右内侧枕回中的代谢活动中被测量到的变化来确定感知负荷。
传感器设备可以是宽带功能性近红外光谱(fNIRS)传感器设备,例如,其被配置为在650nm至900nm的范围内进行感测。
例如,用于头部的宽带fNIRS传感器设备可用于建立测量和检测大脑信号(HbO
宽带fNIRS可通过细胞色素C氧化酶氧化还原状态(oxCCO)以及血液氧合和脱氧(HbO
代谢测量与神经反应直接相关,而HbO
迄今为止,在任何常规fNIRS中都无法获得期望的代谢反应,因为它们仅使用2-3个波长而不是宽带。
减少的代谢的测量理想地指示在执行任务期间的未被注意的刺激,暗示着与减少负荷的被注意任务条件相比,增加的负荷。对新数据的初步分析还指示响应于被注意刺激的增加的代谢。
传感器设备可包括多个输入源和多个检测器,检测器被配置为提供跨越大脑的枕叶的多个测量通道。
测量通道可分布在大脑的主要视觉皮层(V1)的外部范围和/或跨越大脑的外纹区域(V2,V3和V4)。
测量通道可被分组为大脑的多个感兴趣区域,特别是包括左/右枕下回(IOG),左/右枕中回(MOG)和/或内侧枕叶。
通常要注意的是,由于所确定的结果可能不准确(例如,鉴于实际驾驶场景),所以根据本公开的确定(例如“感知负荷的确定”)也可被认为是估计。
本公开还涉及一种包括如上所述的控制设备的车辆。
车辆还可包括传感器,该传感器被配置为感测视觉驾驶场景和/或驾驶员面部,特别是眼睛/瞳孔,该传感器特别是光学传感器,更特别是至少一个数字照相机。驾驶场景可以是第一类型的刺激。
车辆可被配置用于至少部分自动的驾驶控制。该控制设备可以在行驶控制的预处理步骤中使用,以识别暗示对驾驶员的增加的感知负荷的情况。
车辆可包括被配置用于至少部分自动驾驶控制的硬件和/或软件资源。
车辆可包括人机界面,该人机界面被配置为向人类通知危急情况,例如关于增加的感知负荷。因此,人机界面可有助于驾驶员的安全驾驶。
另外或可替代地,人机界面可以被配置用于所谓的接管请求,其中自动控制系统请求驾驶员重新接管对车辆操作的控制。在这种情况下,重要的是,自动控制系统能够可靠地确定与驾驶任务相关的驾驶场景的感知负荷。另一示例性配置将是自动控制系统接管驾驶控制,例如,在系统识别出所确定的感知负荷超过特定阈值的情况下。
意图进行上述元件和说明书内的元件的组合,除非另有矛盾。
应当理解,前面的一般描述和下面的详细描述都只是示例性和说明性的,并且不限制本发明。
结合在本说明书中并构成本说明书的一部分的附图与说明书一起示出了本公开的实施例,并且用于解释其原理。
附图说明
图1示出了根据本公开的实施例的具有控制设备的系统的框图;
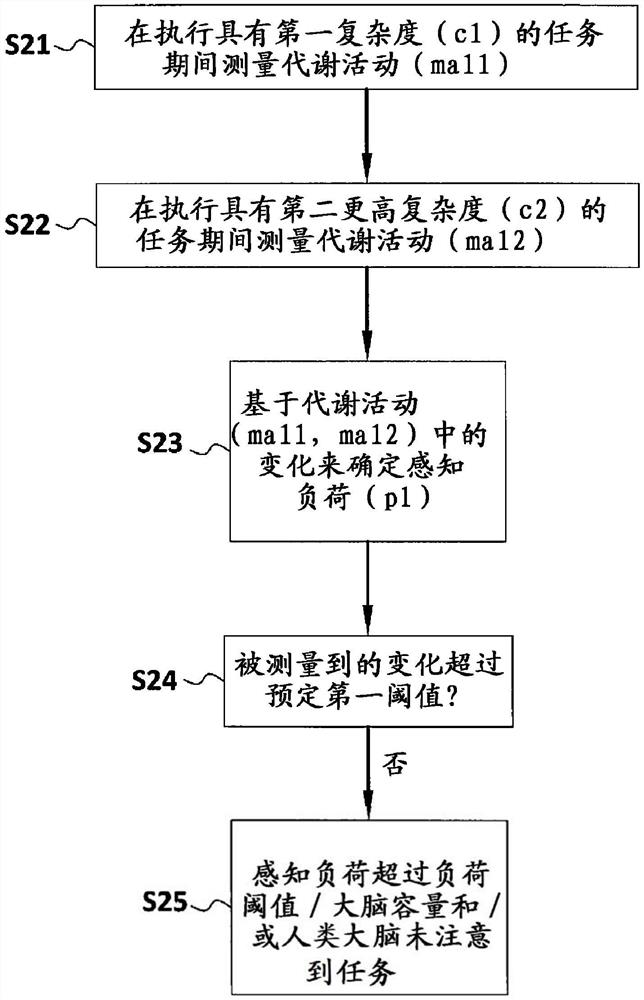
图2示出了说明根据本公开的实施例的确定感知负荷的示例性方法的示意性流程图;
图3示出了说明根据本公开的实施例的确定感知水平的示例性方法的示意性流程图;
图4示出了根据本公开的实施例的示例性刺激的示意图;
图5示出了根据本公开的实施例的具有被测量的代谢活动的示例性水平的图;
图6示出了根据本公开的实施例的由于第二类型的附加刺激而导致的被测量的代谢活动的示例性变化的图,以及
图7示出了根据本公开的实施例的由于任务的复杂度增加而导致的被测量的代谢活动的示例性变化的图。
具体实施方式
现在将详细参考本公开的示例性实施例,其示例在附图中示出。在所有附图中,将尽可能使用相同的附图标记表示相同或相似的部分。
图1示出了根据本公开的实施例的具有控制设备(或电子设备)1的系统10的框图。
控制设备1可连接到或包括数据存储器(未示出)。如下所述,所述数据存储装置可以用于存储算法以确定刺激感知的感知负荷或水平。
控制设备1可在系统10中附加地执行其他功能。例如,控制设备还可以充当系统的通用ECU(电子控制单元)。控制设备1可包括:电子电路、处理器(共享的,专用的或成组的)、组合逻辑电路、执行一个或多个软件程序的存储器、和/或提供所描述的功能的其他合适的组件。
控制设备1还连接到fNIR传感器设备2。控制设备1和传感器设备2可以由系统10组成。fNIR传感器设备可以是功能性近红外光谱。理想的是进一步的宽带传感器,例如在650nm至900nm的范围内(即,从红光到近红外光)。在这种情况下,频带是光的波长,因此宽带是指宽的(大量的)光波长。同时,例如,Shimadzu LightNIRS系统使用三个光带,传感器设备10优选地使用数百个光带。
fNIR传感器设备2可测量指示细胞氧代谢的线粒体酶(特别是细胞色素C氧化酶(oxCCO))的氧化还原状态变化。
fNIR传感器设备2被配置为使得其测量人类h的大脑的代谢活动。传感器设备尤其可以在视觉皮层进行测量,尤其是对主要视觉皮层(V1)的外部范围以及跨越外纹区域(包括V2,V3和V4)进行测量。
fNIRS设备可包括4个输入源和10个检测器(排列成包括5个检测器、4个输入源、5个检测器的行),从而在整个人类的枕叶上形成总共16个测量通道。可以根据10-20电极系统来放置光电二极管,并且可以将所有定位的位置数字化以允许在标准化大脑上绘制通道位置。基于与平均MNI坐标相关联的解剖区域,可将测量通道分为5个感兴趣的区域:左/右枕下回(IOG)、左/右枕中回(MOG)、和内侧枕叶(基于AAL数字大脑地图集)。从功能上讲,这意味着通道理想地分布在主要视觉皮层(V1)的外部范围和跨越外条区域(包括V2,V3和V4)。设置也可以是枕叶皮质之上或与注意力和感知相关联的其他皮质区域(例如,顶叶皮质和听觉颞叶皮质)上的任何其他构造。
枕叶皮质的优选的感兴趣区域(ROI)是左枕中回(MOG);内侧枕叶;右MOG;和/或右枕下回(IOG)。
下表为每个通道的平均MNI坐标指示了合适的解剖位置的示例:
系统10还被连接到,或者甚至包括生成和/或感测设备20。所述设备20被配置为生成和/或感测人类h所暴露的刺激。因此,在设备20被配置为刺激生成器的情况下,系统10(特别是控制设备1)控制设备20。在设备20被配置为刺激传感器的情况下,系统10(特别是控制设备1)接收设备20的传感器数据。作为生成器和传感器的设备20的组合配置也是可能的。
关于刺激,任何种类的刺激都是可能的,只要它们是人类大脑可感知的即可。下面结合图4描述基本刺激区域的示例,其中,系统10主要用作实验测试系统。
然而,该系统也可用于现实生活中的应用中,例如在车辆中。在这种情况下,第一类型的刺激(如稍后更详细地说明)可以例如由驾驶员(即人类h)可感知的视觉和动态驾驶场景组成。
生成和/或传感装置20可包括被配置为感测视觉驾驶场景的传感器,该传感器特别是光学传感器,更特别地是至少一个数字相机。
因此,还可以使用多个传感器,以感测(即,感知)驾驶场景。例如,可以使用两个传感器,以便获得驾驶场景的三维信息以及环视类型传感器配置及其任何组合。
然后,可以将设备20的传感器数据提供给系统10,特别是控制设备1。
此外,第二类型的刺激(如稍后更详细地说明)可例如由视觉和动态驾驶场景中的预定事件组成,例如,人类经过或接近驾驶车道。在这种情况下,第二类型的刺激可以被感测(例如,以与第一类型的刺激相同的方式)并由设备20识别,并且相应的信息可以被提供给系统10。替代地,控制设备可接收设备20的传感器输出,并例如基于机器学习技术自行识别第二类型的刺激。
第二类型的刺激还可包括由设备20生成的刺激,例如,预定的声音或光信号,并且其可被驾驶员感知到。在这种情况下,系统10(特别是控制设备1)可控制设备20的输出。
生成或感测设备20可进一步被配置为响应于对第一类型的刺激的感知而指示人类执行特定任务。这种情况在实验场景中特别相关,例如在图4中的场景。
替代地,设备可确定由第一类型的刺激暗示(即,提供)的任务。这种情况对于例如在正在行驶的车辆中的实际生活应用特别相关。在该示例中,第一类型的刺激可以是驾驶场景,因此,相关任务可包括驾驶车辆。
例如,驾驶场景可暗示制动(任务)。在这种情况下,由驾驶员执行的任务取决于驾驶场景,即,第一类型的(感测)刺激。在另一个示例中,设备20可基于计划的目的地来确定驾驶员必须离开当前道路并且必须进行左转或右转,穿过有车辆的车道(较高的感知负荷)或空车道(较低的感知负荷)到达新道路。在这种情况下,驾驶员将要执行的任务取决于驾驶场景,即,第一类型的(感测)刺激,并取决于提供给驾驶员的外部指令。总而言之,任务可能是上下文相关的。
下面在图2和图3的上下文中更详细地解释控制设备1的功能,特别是从fNIR传感器设备2和生成或传感设备20接收的传感器数据如何继续。
图2示出了示意性流程图,其示出了根据本公开的实施例的确定感知负荷的示例性方法。
在步骤S21中,在由人类执行的具有第一复杂度水平c1的任务期间测量人类大脑的代谢活动ma11。更详细地,人类可被暴露于第一类型的刺激并且可被指示以感知第一类型的刺激并且响应于此来执行预定任务。由于将要执行的任务,在人类大脑中引起感知负荷,这导致可测量的代谢活动。
在步骤S22中,重复步骤S21的过程,但是增加了任务的复杂度c2。所述增加的复杂度可以通过相应地更复杂的第一类型的刺激来控制。再次,在步骤S22中,测量代谢活动ma12。
步骤S21和S22也可以具有另一顺序。步骤S21和S22也可以重复多次,并且例如相应测量的平均值被确定。
在步骤S23中,基于步骤S21中被测量的代谢活动ma11和步骤S22中被测量的代谢活动ma12之间的代谢活动中的变化,确定(或估计)人类大脑的感知负荷(pl)。通常,重大变化表明人类大脑仍然能够感知和/或保持对任务的控制。
在步骤S24中,可确定(测量的)变化是否超过预定的第一阈值。
如果不超过,则在步骤S25中确定感知负荷超过预定负荷阈值,例如预定值或最大脑容量。可能还会发现,人类大脑未注意该任务(例如,由于增加了复杂度,因此不再注意)。例如,在该方法用于车辆中并且相关任务是驾驶任务的情况下,自动驾驶系统可接管驾驶控制。
图3示出了说明根据本公开的实施例的确定第二类型的(未被注意的)刺激的感知水平的示例性方法的示意性流程图。
在步骤S31中,在第一类型的刺激期间测量代谢活动ma21。更详细地,人类被暴露于第一类型s1的刺激,并被引导去感知第一类型的刺激并响应于此来执行预定任务。由于刺激感知和将要执行的任务,在人类大脑中引起了感知负荷,这导致可测量的代谢活动。
在步骤S32中,重复步骤S31的过程,但是还额外地使人类暴露于第二类型s2的刺激下,最好与第一类型s1的刺激同时进行。
第二类型的刺激理想地不与将要由人类执行的任何预定任务相关,或者可以仅是微弱相关,或者可以作为次要刺激而与主要任务刺激相关。换句话说,第二类型的刺激可以被人类感知并因此被人类注意到,而不暗示将要执行相对于与刺激第一刺激有关的任务的任何附加动作。fnirs传感器可以即被用来确定是否注意到了刺激。该方法可应用于也需要注意但是对于与任务相关的刺激而言具有次要的重要性等级的刺激。
再次,在步骤S32中,测量代谢活动ma22,然而,这不仅受第一类型的刺激(如步骤S31中的ma21)的影响,而且还受第二类型s2的刺激的影响。
步骤S31和S32也可以具有另一顺序。步骤S31和S32也可以重复多次,并且例如相应测量的平均值被确定。
在步骤S33中,基于步骤S31中被测量的代谢活动ma21与步骤S32中被测量的代谢活动ma22之间的代谢活动中的变化来确定(或估计)第二类型(s2)的刺激的感知水平。通常,减小的变化指示第二类型的刺激的感知水平减小。换句话说,变化的增加指示人类大脑仍然能够感知第二种类型的其他未被注意的刺激。
在步骤S34中,可以确定(测量的)变化是否超过预定的第二阈值。
如果未超过,则在步骤S35中确定第二类型的刺激没有被感知,或者至少没有被充分感知。例如,在该方法用于车辆中并且第二类型的刺激是在驾驶场景中识别出潜在危险事件的情况下,警告信号可以被激活,或者作为预防措施,自动驾驶系统可接管驾驶控制。
图4示出了根据本公开的实施例的示例性刺激的示意图。特别地,图4显示了实验中使用的刺激,其中,参与者暴露于采用随后出现的具有不同颜色和形状的十字架形式的第一类型的不同刺激,以及采用随机出现或例如出现在每n个(n>1)刺激棋盘中的第n个上的形式的第二类型的刺激。
更详细地,向参与者呈现具有2个不同方向(竖直/反向)的彩色十字架的快速流。在高负荷块期间(请参见带有向上箭头指示的块),目标通过方向和颜色的组合来定义,而在低负荷期间(请参见由向下箭头指示的块),目标仅由颜色来定义。注意,因此在两种情况下视觉刺激可能是相同的,并且仅目标指令可变化。
每个块具有例如25秒的持续时间,随后是25秒的休息时间。在一半的试验中,外围出现了全视场闪烁棋盘,其引导参与者忽略。
为了检验以下假设:响应于未被注意的刺激而在oxCCO信号中的变化受负荷水平的调节,可针对每个感兴趣的区域(ROI)执行具有两个因素负荷和干扰因素存在(即第二类型的刺激的存在)的重复测量ANOVA(方差分析)。
图5示出了根据本公开的实施例的具有被测量的代谢活动的示例性水平的图。特别地,图5示出了针对每个大脑区域的四个平均值(即,测试结果)。这些对应于高负荷条件与低负荷条件的对比,每一个都具有和不具有第二类型的附加刺激(即,棋盘)。在两个区域(内侧枕骨和右MOG)中,在低感知负荷下从棋盘缺失状态到棋盘存在状态的相对增加比在高感知负荷下显著更大(即,在容易的任务时棋盘被更强烈地感知)。
图6示出了根据本公开的实施例的由于第二类型的附加刺激而导致的被测量的代谢活动的示例性变化的图。与图5相比,图6仅显示了针对高负荷和低负荷,在棋盘存在与缺失条件的之间的相对差(即,从棋盘存在值中减去棋盘缺失值)。
特别地,图6示出了与第二类型刺激的存在相关的oxCCO浓度变化(存在减去缺失)在高感知负荷条件和低感知负荷条件下的比较:响应于存在棋盘在低负荷期间比高负荷显著更高的信号增加在内侧枕叶和右内侧枕回中被发现。误差条表示平均值的标准误差。
在内侧枕叶(F(1,12)=9.18,p=.010)和右MOG(F(1,9)=10.39,p=.010)中,在负荷与干扰因素存在(即,第一类型和第二类型的刺激)之间的相互作用是重要的。这种相互作用的方向如预期的那样:对于两种ROI,在低负荷(内侧枕叶:M=0.029μM,SD=0.019;右MOG:M=0.029μM,SD=0.018)下,在存在条件和缺失条件之间信号变化的差异比高负荷(内侧枕叶:M=0.018μM,SD=0.019;右MOG:M=0.011μM,SD=0.011)更大。事后配对的t个测试确定,在两个ROI中,在低负荷(内侧枕叶:t(12)=5.52,p<.001;右MOG:t(9)=5.29,p=.001)以及高负荷(内侧枕叶:t(12)=3.40,p=.005;右MOG:t(9)=3.20,p=.011)下存在干扰因素存在的简单主要效应。除左IOG以外,在所有其他ROI上,针对干扰因素的存在对比缺失的oxCCO信号衰减的趋势都一致(见图5)。这指示:与低负荷相比,在高感知负荷的条件下,与干扰因素的存在有关的代谢活动降低。就发明人所知,这是依赖于负荷的注意力调节影响视觉皮层中脑代谢的第一直接证据。
该结果与先前的fMRI发现一致,该fMRI发现使用依赖于血氧水平(BOLD)的信号来测量视觉皮层反应中神经反应的负荷调节(Rees等人,1997;Schwartz等人,2005;Torralbo等人,2016)。但是,这些先前的发现与脑能量消耗没有直接关系:BOLD信号利用HHb的顺磁特性。在神经活动期间,由于脑血流量、脑血容量和细胞代谢中的变化的复杂相互作用,HHb的浓度降低。血流量中的显著更大变化不是能量需求增加的直接结果,而是由谷氨酸能信号触发的。重要的是,由于它们之间的耦合在空间和时间上是可变的,并且受神经激活的影响,因此这两个过程不应相互等同。因此,测量HHb水平的BOLD信号不适用于测试特定于脑代谢的假设。
如本公开中描述的结果包括了Moradi等人的最新发现(2012),他们使用fMRI来测量BOLD信号以及脑血流量(CBF),以便在周围棋盘刺激被注意和未被注意观察的情况下,在数学上估计氧气的脑代谢率(CMRO
在本公开中,如以上在图4至图6的上下文中所述,参与者必须在高负荷(“未被注意”)和低负荷(“被注意”)条件下在屏幕的中央执行任务,并且在两种情况下,棋盘干扰因素是不相干的。此外,快速的刺激呈现速度确保了这种固定被支持。
如上文在图4至图6的上下文中所描述的,负荷理论的感知处理的有限容量模型得到结果支持,其作为针对感知处理的能力限制的可能生理关联来关注代谢。大脑的总能量消耗保持相对恒定,而与精神状态无关。然而,神经脉冲在代谢上非常昂贵。这导致提出了一种稀疏编码模型的建议,其中通过仅使用很少的活动神经元来表示相关信息来节省资源。本公开支持这种模型,因为它示出在由于任务需求而需要增强对其他刺激的处理的条件下,代谢活动显著减弱。特别地,通过减少在高负荷条件下与任务无关的刺激的表示而节省的代谢资源确实用于改善被注意的、与任务相关的刺激的表示。
总之,如以上在图4至图6的上下文中所描述的结果示出:与低感知负荷相比,在高感知负荷条件下,对于与任务无关的刺激,在纹状皮层和外纹皮层中的脑代谢显著减弱。细胞代谢中这些注意力引起的依赖于负荷的变化在感知负荷理论的框架内得到了解释(请查阅例如:Lavie,Nilli;Tsal,Yehoshua(1994)。Lavie,N(1995)在感知与心理物理学,56(2):183–197中的“Perceptual load as a major determinant of the locus of selectionin visual attention(感知负荷作为视觉注意力中选择的轨迹的主要决定因素)”。Lavie,N.(2005)在Journal of Experimental Psychology:Human Perception and Performance(实验心理学杂志:人类的感知与表现),21,451-468中的Perceptual load as anecessary condition for selective attention(感知负荷是选择性注意的必要条件)。Lavie,N.,Beck,D.M.&Konstantinou,N.(2014)在Trends in Cognitive Sciences(认知科学的趋势),9,75-82中的Distracted and confused?:selective attention under load(分心和困惑?:负荷下的选择性注意力)。在Philosophical Transactions of the RoyalSociety B(皇家学会的哲学交易B:生物科学),369:20130205中的Blinded by the load:attention,awareness and the role of perceptual load(被负荷所蒙蔽:注意力、意识和感知负荷的作用)),并容纳了大量神经影像学发现,这些发现减少了BOLD反应(Rees等人,1997;Schwartz等人,2005;Torralbo等人,2016),神经兴奋性(Muggleton等人,2008)以及在高负荷条件下与任务无关的刺激的神经场潜能。重要的是,这表明代谢直接受负荷影响,因此可能与负荷理论中概述的容量限制在神经上有关。此外,本公开展示了多通道宽带fNIRS如何可能是一种有利的神经成像工具,因为它允许血管与代谢因素之间的区别,而这在诸如BOLD信号的测量中是不可能的。
图7示出了由于人类执行的任务的感知负荷的变化而导致被测量的代谢活动的示例性变化的图。任务与图4中的任务相同,但十字架更大且被图案化。特别地,图7显示了在缺失闪烁棋盘(第二类型的刺激)的情况下,在低负荷任务与高负荷之间oxCCO浓度变化的比较:响应于任务的感知负荷增加,显著的更高信号增加被发现。误差条表示平均值的标准误差。
在本示例中,通道8用于测量。fNIRS系统的测量通道位于每个输入源和探测器之间。在当前示例性情况下,通道8是指枕叶(左内侧枕回)中的位置,在该位置中,高负荷和低负荷之间的测量变化达到统计意义。因此,期望地在枕叶处进行测量。
在整个说明书中,包括权利要求,除非另有说明,否则术语“包括一个”应理解为与“包括至少一个”同义。另外,除非另外说明,否则说明书中阐述的任何范围,包括权利要求,应被理解为包括其末端的值。所描述的元件的特定值应被理解为在本领域技术人员已知的可接受的制造或工业公差内,并且对术语“基本上”和/或“大约”和/或“通常”的任何使用应被理解为:均在此类可接受的公差范围内。
尽管这里已经参考特定实施例描述了本公开,但是应当理解,这些实施例仅是本公开的原理和应用的说明。
意图将说明书和示例仅视为示例性的,本公开的真实范围由所附权利要求书指示。
- 用于确定人类大脑的感知负荷和刺激感知水平的系统和方法
- 一种用于假肢手感知反馈的电刺激感知反馈系统