包括推进和非推进发电系统的多旋翼飞行器
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及一种飞行器的推进和非推进发电系统,更具体地说,涉及用于设置有多个旋翼的飞行器的混合动力推进系统的电气链架构。
背景技术
垂直起降飞行器特别地越来越多地用于货物或人员的城市内和城市间运输。
越来越多的飞行器以混合动力推进系统运行,也就是说,以一种包括涡轮机、发电机和电池的系统运行,因为仅从电池运行的纯电动系统仅适用于短距离的负载运输,就像城市内市场上的负载运输一样,与涡轮发电机相比,与电池的低功率密度有关的电池寿命对于其他市场来说并不足够。
发明内容
本发明的目的在于提供一种用于在长距离和中等距离上运输大负载的混合动力推进系统的电气链解决方案。本发明的目的在于提出一种飞行器的推进和非推进发电系统,所述系统耐用、质量优化、可根据电池的需要和电容进行伸缩、在维护和开发方面成本优化,以及在集成到飞行器内的方面优化。
在本发明的第一目的中,提出了一种飞行器的推进和非推进发电系统,所述系统包括至少一个涡轮机以及至少两个旋翼对,相同旋翼对的旋翼旨在在所述飞行器上具有对称相反的位置。
根据本发明的第一目的的通用特征,所述系统进一步包括:
-至少四个电动机,每个电动机都驱动一个旋翼,
-连接至涡轮机的至少一台发电机,
-至少两条电源线,电源线的数量最多等于所述系统的旋翼数量,每条电源线包括连接至所述电动机之一的至少一个电力推进分支,在输出处连接至所述至少一个推进分支的电池,以及在发电机的输出和所述至少一个推进分支之间连接的AC-DC转换器。
因此,根据本发明的系统允许向飞行器提供在质量、成本、性能、模块化和可扩展性方面优化的电气链,同时由于使用了减少数量的设备和布线,以及使用了更容易以混合动力或电力推进系统安装在多旋翼飞行器上的更轻便设备,允许飞行器上的优化集成。
根据本发明的系统特别地允许将总电力分割成高压直流(HVDC)类型的多条独立电源线,所述电源线与相关联的电动机和旋翼一起形成多个受控的推进模块。
电源的细分还允许具有更小尺寸的电源元件,这允许限定更有效的电气保护和线缆。该细分允许降低每个元素的功率。例如,可以通过细分使用具有较低电流的三个100kW整流器,而非单一300kW整流器。
使用一种具有AC-DC转换器的发电机可以形成和分配高压直流总线,其进一步允许简单和有效地并联连接一种高压直流电池。转换器允许通过特别地驱动电源线上的电压来监控在发电机和电池之间的混合,而且允许通过将发电机反转为电起动电动机来启动涡轮机。
根据所述推进和非推进发电系统的第一方面,所述系统可进一步包括控制设备,所述控制设备被构造成当相同旋翼对的至少一个电动机发生故障时切断对所述旋翼对的电动机的电源。
根据所述推进和非推进发电系统的第二方面,至少一条电源线可进一步包括一种非推进电气部件供电分支。
因此,可以从多种电源线为飞行器的非推进电气部件供电。
根据所述推进和非推进发电系统的第三方面,所述或每个发电机可包括一种设置有至少两个电气和电磁独立的三相绕组的电机(电机),用于集成到所述电机的每个三相绕组的独立和绝缘的AC-DC整流器电动机,以及在涡轮机和发电机之间连接的快速机电断开装置,每条电源线的AC-DC转换器由电机的AC-DC整流器形成。
该多绕组电机允许减少系统的总质量,同时考虑了绕组之间的电气和电磁绝缘。例如,其允许使用每个都设置有三个三相绕组的两个电动机,而非每个都设置有一个三相绕组的六个电动机。
交流-直流转换器在电机中的集成形成一种允许优化系统的集成度和质量的智能发电机。与感应电动机或直流电动机相比,其还允许实现更大的功率密度。
AC-DC转换器为机电一体化的。因此,它共享涡轮机和电子发电机的液体冷却回路。
快速机电断开装置允许使发电机与涡轮机分隔。
根据所述推进和非推进发电系统的第四方面,所述发电机可以是永磁电机。
永磁电机具有与其他类型的电动机相比更好的功率密度。
根据所述推进和非推进发电系统的第五方面,每条电源线可进一步包括在AC-DC转换器和电池之间连接的DC-DC电转换器,以允许从发电机对电池进行再充电。
DC-DC电转换器有助于从发电机为蓄电池充电。DC-DC电转换器允许通过避免过高电流和限制充电速率来保护电池。
根据所述推进和非推进发电系统的第六方面,所述系统可进一步包括在控制设备和这些电动机之间的高速和高集成度串行数字总线。
高速和高集成度串行数字总线可以使用通信协议,诸如非常高速同步和确定性的以太网协议。以太网标准允许使用已经合格并且因此成本较低的标准不同物理层(光学层或铜层)。也可以使用其他类型的总线,诸如
根据所述推进和非推进发电系统的第七方面,所述控制设备可包括每个电源线的一个控制卡,所述控制卡彼此通信,每个控制卡包括一种用于监控与所述控制卡相关联的电源线的电压的模块,所述模块被构造成基于电池的充电水平以及由电源线供电的电动机的电压来控制由AC-DC转换器提供的电压以及控制由电池提供的电压,所述电压取决于由这些电动机所需的速度或扭矩。
根据所述推进和非推进发电系统的第八方面,其包括两倍于旋翼对的许多电动机对,每条电源线包括两个推进分支,并且每个旋翼对与两条单独的电源线相关联,相同旋翼对的第一旋翼的第一电动机和第二旋翼的第一电动机由第一电源线供电,并且所述相同旋翼对的第一旋翼的第二电动机和第二旋翼的第二电动机由第二电源线供电。
因此,每条电源线为驱动相同旋翼对的两个旋翼的两个电动机供电,这些旋翼在飞行器上相对于飞行器的轴或点对称相反。这因此使得控制设备补偿电源线或由电源线供电的电动机的故障,从而保持飞行器的对称平衡推进。
在本发明的另一目的中,提出了一种飞行器,其包括如上所限定的推进和非推进发电系统。
附图说明
通过以下经由指示但不限制地进行的阅读,参考附图,将更好地理解本发明,其中:
图1示意性地示出了根据本发明一个实施例的多旋翼飞行器的旋翼分布;
-图2示意性地表示根据本发明第一实施例的推进和非推进发电系统的电气架构;
-图3示意性地表示根据本发明第二实施例的推进和非推进发电系统的电气架构;
-图4示意性地表示根据本发明第三实施例的推进和非推进发电系统的电气架构;
-图5示意性地示出了根据本发明的系统的发电机的变型。
具体实施方式
图1示意性地示出了根据本发明一个实施例的多旋翼飞行器7的旋翼1至6在链状虚圆上的分布。
在所示的示例中,飞行器7包括形成三对旋翼的六个旋翼1至6,同一对的旋翼相对于对称中心8对称相对。第一对旋翼包括旋翼1和6,第二对旋翼包括旋翼2和5,第三对旋翼包括旋翼3和4。
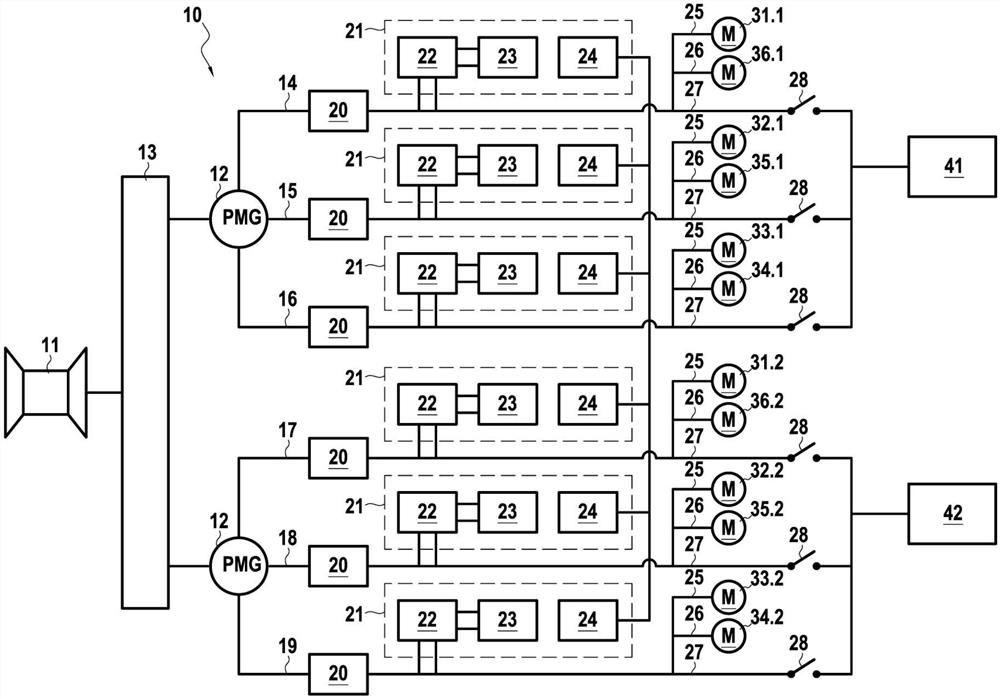
图2示意性地表示根据本发明第一实施例的飞行器7的推进和非推进发电系统10的第一电气架构。
系统10包括涡轮机11和两个永磁发电机12。这两个发电机12由涡轮机11通过相同的齿轮箱13机械地驱动。
每个发电机12均包括三个电输出,每个都提供一条在图2中中分别标记为14到19的电源线供电。每条电源线14至19均包括AC-DC转换器20和电源单元21,所述电源单元21包括电池22、DC-DC转换器23和控制模块24。每条电源线14至19还包括第一和第二推进分支25和26,以及用于为非推进电气部件41或42供电的附加供电分支27。
在图2所示的第一实施例中,系统10还包括六对电动机,即十二个电动机,这些电动机被数字标记为31.1、31.2、32.1、32.2、33.1、33.2、34.1、34.2、35.1、35.2、36.1、36.2。电动机31.1至36.2每个都由电源线14至19的一个推进分支25或26供电,每个电动机都与旋翼1至6相关联。
每个旋翼1至6均与一对电动机相关联,以提供电气冗余,由此减少了每个电动机必须提供的电力,这使得可减小这些电动机的尺寸。此外,这些电动机的冗余使得在这些电动机中的一个发生故障时可改进推进系统的运行安全性。
由电动机31.1和31.2形成的该对电动机驱动第一旋翼1,第二旋翼2由电动机32.1和32.2驱动,第三旋翼3由电动机33.1和33.2驱动,第四旋翼4由电动机34.1和34.2驱动,第五旋翼5由电动机35.1和35.2驱动,并且第六旋翼6由电动机电动机36.1和36.2驱动。
因此,每个旋翼1至6由一对两个电动机31.1至36.2驱动,同一对电动机的两个电动机每个都由不同的电源线14至19供电。因此,第一对电动机31.1和31.2的第一电动机31.1由第一电源线14的第一推进分支25供电,而第一对电动机31.1和31.2的第二电动机31.2由第四电源线17的第一推进分支25供电。第二对电动机32.1和32.2的第一电动机32.1由第二电源线15的第一推进分支25供电,而第二对电动机32.1和32.2的第二电动机32.2由第五电源线18的第一推进分支25供电。第三对电动机33.1和33.2的第一电动机33.1由第三电源线16的第一推进分支25供电,而第三对电动机33.1和33.2的第二电动机32.2由第六电源线19的第一推进分支25供电。第四对电动机34.1和34.2的第一电动机34.1由第三电源线16的第二推进分支26供电,而第四对电动机34.1和34.2的第二电动机34.2由第六电源线19的第二推进分支26供电。第二对电动机35.1和35.2的第一电动机35.1由第二电源线15的第二推进分支26供电,而第五对电动机35.1和35.2的第二电动机35.2由第五电源线18的第二推进分支26供电。第六对电动机36.1和36.2的第一电动机36.1由第一电源线14的第二推进分支26供电,而第六电动机对36.1和36.2的第二电动机36.2由第四电源线17的第二推进分支26供电。
前三条电源线14至16的三个附加电源分支27经由三个受控开关28为第一组非推进电气部件41供电,每个所述受控开关都能将一条电源线连接至这些部件。最后三条电源线17至19的三个附加电源分支27经由三个受控开关28为第二组非推进电气部件42供电,每个所述受控开关都能将一条电源线连接至这些部件。
电源线14至19的控制模块24连接在一起并共同形成控制设备。因此,电源线14至19的每个通信模块24均控制电池23和DC-DC转换器22,从而经由AC-DC转换器20从发电机12对电池再充电,或者基于电池23的充电水平和基于相应电动机所需的电力输送电源电压到电源线的推进分支25和26。
此外,控制模块24经由高速和高集成度串行数字总线彼此连接并连接至电动机。
当一台电动机或一条线路出现故障时,由该架构提供的电源细分使得可切断两个对称相对电动机的电源。
图3示意性地表示根据本发明第二实施例的飞行器7的推进和非推进发电系统10'的第二电气架构。与图2所示的第一实施例等同的元件具有相同的附图标记。
该架构与图2所示第一实施例的第一架构的不同之处在于,它为三组不同的非推进电气部件41到43供电。第一电源线14的附加电源分支27和第四电源线17的附加电源分支27经由两个受控开关28为第一组非推进电气部件41供电,所述受控开关每个都能够将一条电源线连接至部件。第二电源线15的附加电源分支27和第五电源线18的附加电源分支27经由两个受控开关28为第二组非推进电气部件42供电,每个所述受控开关都能够将一条电源线连接至这些部件。并且第三电源线16的附加电源分支27和第六电源线19的附加电源分支27经由两个受控开关28为第三组非推进电气部件43供电,每个所述受控开关都能够将一条电源线连接至部件。
图4示意性地表示根据本发明第三实施例的飞行器的推进和非推进发电系统10”的第三电气架构。与图3所示的第二实施例等同的元件具有相同的附图标记。
该架构与图3所示第二实施例的第二架构的不同之处在于,其仅包括六个电动机31至36,每个都驱动一个旋翼1至6,每个电动机31至36均由电源线14至16供电,所述电源线包括单一推进分支25和附加电源分支27,所述系统包括经由相同的齿轮箱13连接至涡轮机11的三个发电机12,每个发电机12均包括两个三相输出,每个三相输出都为一条电源线14至19供电。
在第三实施例中,当该对电动机的一电动机的运行存在缺陷时,控制设备设置为切断对对该电动机的另一个电动机的电源。
图5示意性地表示根据本发明的系统的发电机的一种变型。
在该变型中,由三输出发电机12和三个AC-DC转换器20形成的组件被智能发电机200或智能电动机所替代,所述智能发电机或智能电动机与在涡轮机11和发电机200之间连接的快速机电断开装置205相关联。智能电动机包括电机202,所述电机202设置有三个电气和电磁独立的三相绕组,并且设置有用于集成到智能电动机的每个三相绕组的独立和隔离的AC-DC整流器210。
因此,本发明提供了一种允许长距离运输大负载的混合动力推进系统的电气链解决方案。本发明的目的在于提供一种飞行器的推进和非推进发电系统,所述系统耐用、质量优化、可根据电池的需要和电容进行伸缩、在维护和开发方面成本优化,以及在集成到飞行器内的方面优化。
- 包括推进和非推进发电系统的多旋翼飞行器
- 包括热力发动机和电动马达的螺旋桨推进单元以及包括这样的螺旋桨推进单元的飞行器