一种基于计算机控制的机器人结构
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及机器人领域,更具体的说是一种基于计算机控制的机器人结构。
背景技术
申请号为CN201810039041.X公开的可调节机器人及其肩部,包括:肩部机架;肩关节,成对对称地设置于所述肩部机架上,至少一个所述肩关节可沿机器人的宽度方向滑动地保持于所述肩部机架上;锁紧机构,用于实现所述肩部机架与所述肩关节之间的定位锁紧。本发明提供的可调节机器人及其肩部具有可调节的尺寸规格,满足不同的应用需要,有效地提高了机器人骨架的通用性,降低了设计与制造成本。但是该专利无法控制的机器人攀爬两个墙面之间的缝隙。
发明内容
本发明提供一种基于计算机控制的机器人结构,其有益效果为本发明可以控制的机器人攀爬两个墙面之间的缝隙。
本发明涉及机器人领域,更具体的说是一种基于计算机控制的机器人结构,包括平座、固定套、横移条、固定盘、顶针、弧形片、竖柱和伸缩杆II,本发明可以控制的机器人攀爬两个墙面之间的缝隙。
所述平座的左右两端均固定连接有固定套,两个固定套上均滑动连接有横移条,横移条的外端固定连接有固定盘,固定盘的外侧中部固定连接有顶针,横移条的上侧固定连接有竖柱,竖柱的外侧固定连接有伸缩杆II,弧形片在左右方向上滑动连接在固定盘上,伸缩杆II的活动端固定连接在弧形片的内端。
所述基于计算机控制的机器人结构还包括铰接座、伸缩杆I和铰接杆,平座的上侧中部固定连接有伸缩杆I,伸缩杆I的上端固定连接有铰接座,铰接座的左右两侧均铰接有铰接杆,铰接杆的左右两端分别铰接在两个横移条的内端。
所述基于计算机控制的机器人结构还包括电机座、电机I、摩擦轮、弹片、横柱和凸起,横柱的内端固定连接在竖柱的上部,电机座在左右方向上滑动连接在横柱上,弹片的一端固定连接在电机座上,弹片的另一端固定连接在竖柱的上部,横柱的下侧外部固定连接有凸起,电机座上固定连接有电机I,电机I的输出轴上固定连接有摩擦轮。
所述基于计算机控制的机器人结构还包括梯形轨、斜架、转轮、双轴电机、伸臂和螺杆,平座的下侧设置有左右方向的梯形轨,斜架的上端固定连接在平座的下侧中部,斜架的下端转动连接有转轮,伸臂左右各设置有一个,两个伸臂的后部分别滑动连接在梯形轨的左右两端,双轴电机固定连接在平座的前侧中部,双轴电机左右两端的输出轴上均固定连接有螺杆,两个螺杆通过螺纹分别与两个伸臂相配合。
所述基于计算机控制的机器人结构还包括套筒、轮架、主动轮、电机II、固定轴、圆柱杆和硬弹簧,两个伸臂的前端均固定连接有固定轴,两个固定轴上均转动连接有套筒,两个套筒的内侧均固定连接有圆柱杆,硬弹簧的左右两端分别固定连接在两个圆柱杆上,两个套筒的下侧均固定连接有轮架,两个轮架的下端均固定连接有电机II,两个电机II的输出轴上均固定连接有主动轮。
所述基于计算机控制的机器人结构还包括侧座、上爬轮、电机III、L形架、竖轴和下爬轮,两个套筒的外侧均固定连接有侧座,两个侧座的上侧均固定连接有L形架,两个L形架上均固定连接有电机III,两个电机III的下端输出轴上均固定连接有竖轴,每个竖轴的上下两端分别设置有上爬轮和下爬轮。
所述基于计算机控制的机器人结构还包括伸缩杆III、门形件和凸棱,每个竖轴的下部均轴线设置有凸棱,下爬轮竖向滑动连接在凸棱上,侧座上固定连接有伸缩杆III,伸缩杆III的下端固定连接有门形件,门形件插在下爬轮的一侧。
所述基于计算机控制的机器人结构还包括后伸柱、横轨杆和箱体,平座后侧的左右两端均固定连接有后伸柱,横轨杆固定连接在两个后伸柱之间,箱体滑动连接在横轨杆上,横轨杆上套接有两个压缩弹簧,两个压缩弹簧分别位于箱体的左右两侧。
所述箱体内设置有计算机和电源。
本发明一种基于计算机控制的机器人结构的有益效果为:
本发明一种基于计算机控制的机器人结构,本发明可以控制的机器人攀爬两个墙面之间的缝隙。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
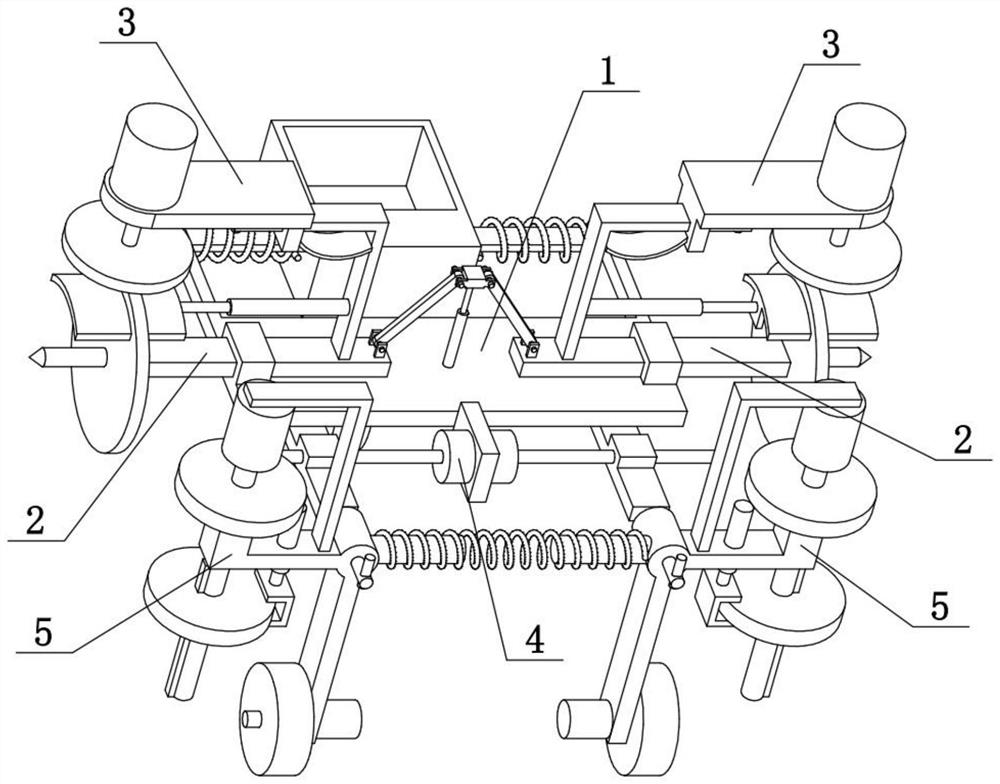
图1为本发明一种基于计算机控制的机器人结构的整体结构示意图一;
图2为本发明一种基于计算机控制的机器人结构的整体结构示意图二;
图3为平座的结构示意图一;
图4为平座的结构示意图二;
图5为横移条和电机座的结构示意图;
图6为双轴电机的结构示意图;
图7为侧座的结构示意图一;
图8为侧座的结构示意图二。
图中:平座1;固定套101;后伸柱102;横轨杆103;铰接座104;箱体105;伸缩杆I106;铰接杆107;梯形轨108;斜架109;转轮110;横移条2;固定盘201;顶针202;弧形片203;竖柱204;伸缩杆II205;电机座3;电机I301;摩擦轮302;弹片303;横柱304;凸起305;双轴电机4;伸臂401;螺杆402;套筒403;轮架404;主动轮405;电机II406;固定轴407;圆柱杆408;硬弹簧409;侧座5;上爬轮501;电机III502;L形架503;伸缩杆III504;门形件505;竖轴506;凸棱507;下爬轮508。
具体实施方式
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
具体实施方式一:
下面结合图1-8说明本实施方式,本发明涉及机器人领域,更具体的说是一种基于计算机控制的机器人结构,包括平座1、固定套101、横移条2、固定盘201、顶针202、弧形片203、竖柱204和伸缩杆II205,本发明可以控制的机器人攀爬两个墙面之间的缝隙。
所述平座1的左右两端均固定连接有固定套101,两个固定套101上均滑动连接有横移条2,横移条2的外端固定连接有固定盘201,固定盘201的外侧中部固定连接有顶针202,横移条2的上侧固定连接有竖柱204,竖柱204的外侧固定连接有伸缩杆II205,弧形片203在左右方向上滑动连接在固定盘201上,伸缩杆II205的活动端固定连接在弧形片203的内端。两个横移条2分别可以在两个固定套101上左右滑动,进而调整两个固定盘201和两个顶针202的左右位置,当机器人进入两个墙壁之间的窄缝处后,两个顶针202分别顶在左右两个墙上,进而将平座1设置在两个墙壁之间,这时平座1还可以通过两个顶针202的共同轴线为轴转动,调整平座1的方向,两个伸缩杆II205伸缩时可以带动两个弧形片203在固定盘201上左右滑动,进而带动两个弧形片203分别顶在两个墙壁上,这时将平座1固定在两个墙壁之间。
具体实施方式二:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括铰接座104、伸缩杆I106和铰接杆107,平座1的上侧中部固定连接有伸缩杆I106,伸缩杆I106的上端固定连接有铰接座104,铰接座104的左右两侧均铰接有铰接杆107,铰接杆107的左右两端分别铰接在两个横移条2的内端。伸缩杆I106伸缩时可以带动铰接座104进行升降,进而通过两个铰接杆107带动两个横移条2相互靠近或者远离,进而带动两个顶针202分别顶在左右两个墙上。
具体实施方式三:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括电机座3、电机I301、摩擦轮302、弹片303、横柱304和凸起305,横柱304的内端固定连接在竖柱204的上部,电机座3在左右方向上滑动连接在横柱304上,弹片303的一端固定连接在电机座3上,弹片303的另一端固定连接在竖柱204的上部,横柱304的下侧外部固定连接有凸起305,电机座3上固定连接有电机I301,电机I301的输出轴上固定连接有摩擦轮302。弹片303给电机座3向外移动的力,当两个顶针202分别顶在左右两个墙上时,两个摩擦轮302也分别与两个墙壁相接触,电机I301转动带动摩擦轮302转动,摩擦轮302转动时带动平座1以两个顶针202的共同轴线为轴转动,调整平座1的倾斜度和方向。
具体实施方式四:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括梯形轨108、斜架109、转轮110、双轴电机4、伸臂401和螺杆402,平座1的下侧设置有左右方向的梯形轨108,斜架109的上端固定连接在平座1的下侧中部,斜架109的下端转动连接有转轮110,伸臂401左右各设置有一个,两个伸臂401的后部分别滑动连接在梯形轨108的左右两端,双轴电机4固定连接在平座1的前侧中部,双轴电机4左右两端的输出轴上均固定连接有螺杆402,两个螺杆402通过螺纹分别与两个伸臂401相配合。双轴电机4可以带动两个螺杆402转动,进而带动两个伸臂401在梯形轨108上相互靠近或者远离,进而调整两个伸臂401之间的间距。转轮110用于机器人在地面行走。
具体实施方式五:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括套筒403、轮架404、主动轮405、电机II406、固定轴407、圆柱杆408和硬弹簧409,两个伸臂401的前端均固定连接有固定轴407,两个固定轴407上均转动连接有套筒403,两个套筒403的内侧均固定连接有圆柱杆408,硬弹簧409的左右两端分别固定连接在两个圆柱杆408上,两个套筒403的下侧均固定连接有轮架404,两个轮架404的下端均固定连接有电机II406,两个电机II406的输出轴上均固定连接有主动轮405。调整两个伸臂401之间的间距后,可以调整两个轮架404和两个主动轮405之间的间距,两个主动轮405用来机器人在地面上行走时使用,两个伸臂401间距变化时,硬弹簧409会被拉长或者缩短,两个轮架404可以通过其上的套筒403在固定轴407上转动,进而带动两个轮架404略微倾斜,使得两个轮架404适应更多地形,这时两个套筒403转动带动两个圆柱杆408转动扳动硬弹簧409弯曲,硬弹簧409对两个圆柱杆408和两个轮架404进行回位。
具体实施方式六:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括侧座5、上爬轮501、电机III502、L形架503、竖轴506和下爬轮508,两个套筒403的外侧均固定连接有侧座5,两个侧座5的上侧均固定连接有L形架503,两个L形架503上均固定连接有电机III502,两个电机III502的下端输出轴上均固定连接有竖轴506,每个竖轴506的上下两端分别设置有上爬轮501和下爬轮508。两个伸臂401相互远离后,可以使得两个竖轴506上的上爬轮501和下爬轮508分别压在对应的墙壁上,这时调整平座1的倾斜度和方向,这时将顶针202和弧形片203均离开墙壁,两个电机III502转动时带动两个上爬轮501和两个下爬轮508转动,带动机器人在墙壁的缝隙处向不同方向行走。两个竖轴506也可以通过两个套筒403转动一定的角度,进而使得机器人适应不平行的两个墙壁之间的行走。
具体实施方式七:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括伸缩杆III504、门形件505和凸棱507,每个竖轴506的下部均轴线设置有凸棱507,下爬轮508竖向滑动连接在凸棱507上,侧座5上固定连接有伸缩杆III504,伸缩杆III504的下端固定连接有门形件505,门形件505插在下爬轮508的一侧。伸缩杆III504伸缩时带动门形件505升降,进而带动下爬轮508沿着两个竖轴506滑动,根据需要调整下爬轮508和上爬轮501之间的间距。
具体实施方式八:
下面结合图1-8说明本实施方式,所述基于计算机控制的机器人结构还包括后伸柱102、横轨杆103和箱体105,平座1后侧的左右两端均固定连接有后伸柱102,横轨杆103固定连接在两个后伸柱102之间,箱体105滑动连接在横轨杆103上,横轨杆103上套接有两个压缩弹簧,两个压缩弹簧分别位于箱体105的左右两侧。箱体105可以在横轨杆103上左右滑动,两个压缩弹簧对箱体105进行回位,当平座1倾斜后,箱体105向低处滑动,将机器人的重心降低,使得机器人更加稳定。
具体实施方式九:
下面结合图1-8说明本实施方式,所述箱体105内设置有计算机和电源。电源用来向用电器提供电力。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种基于计算机控制的机器人结构
- 一种基于计算机控制的工业机器人用夹紧机构