一种基于蓝牙信标的电动汽车无线充电对位系统及方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及无线充电技术领域,具体涉及一种基于蓝牙信标的电动汽车无线充电对位系统及方法。
背景技术
无线充电具有充电便捷、安全性高、使用寿命长、自动化完善等优点,是电动汽车充电技术的重要发展方向之一。电动汽车无线充电通常利用地面端的发射线圈和车辆端的接收线圈,通过磁耦合(电磁感应或者电磁共振)的原理来实现电能的非接触式传输,并为电动汽车的动力电池充电。基于电磁耦合的基本原理,发射线圈和接收线圈的相对位置,会对耦合系数产生非常大的影响。当发射线圈和接收线圈位置对齐时,线圈耦合系数最大,无线充电效率也最高。因此,发射线圈和接收线圈的对位,是电动汽车高效率无线充电的关键。
在现有无线充电系统发明中,所采取的对位系统多为自动泊车系统,其引导是以传感器对汽车车身距离的判断以确定汽车位置为基准进行位置调整的。该对位系统目前具有以下几个问题:1)汽车品牌车型种类繁多,相同品牌车型接收线圈安装位置虽然一致,但不同车型相对位置未必一致,部分系统没有加入车型辨别系统来实现现实中的差异化;2)即便有部分对位系统加入了汽车属性数据库甄别,工作量与成本对于系统的实现也太过繁琐、成本高;3)汽车长时间高速动作情况下,接收线圈相对位置难以确保是否有低行程位移,控制系统通过上层参数进行定位难以实现精确度的保证;4)现有系统多理想化未考虑闭环,未检测是否存在现实中传感器被干扰抑或阻挡的情况下造成的对位失效。如何解决上述技术问题,是本领域技术人员致力于解决的事情。
发明内容
本发明的目的是克服现有技术的不足,提供一种基于蓝牙信标的电动汽车无线充电对位系统,采用蓝牙的方式对接收线圈进行直接定位从而引导汽车泊车,进入范围后再采取电磁感应的原理进行精确调整定位。
为达到上述目的,本发明采用的技术方案是:一种基于蓝牙信标的电动汽车无线充电对位系统,包括主控单元、与主控单元通讯连接的地面控制单元、设置在待充电汽车上的接收线圈与蓝牙信标、设置在停车场处的发射线圈与通信接收机,所述通信接收机有多组,包括分别位于待充电汽车左、右两侧的第一组通信接收机与第二组通信接收机以及位于待充电汽车前侧的第三组通信接收机,蓝牙信标用于发出广播信号,通信接收机用于将接收到的广播信号调制解调后形成数据传输给地面控制单元,由地面控制单元将数据传输给主控单元;所述主控单元对接收到的数据进行计算分析,得到接收线圈的实际坐标,而后与原先存储的接收线圈的目标坐标进行比较后将信息回传给地面控制单元,由地面控制单元调控接收线圈与发射线圈间的相对位置。
作为一种具体的实施方式,所述第一组通信接收机、第二组通信接收机及第三组通信接收机均至少包含两个通信接收机。
作为一种具体的实施方式,所述第一通信接收机与第二通信接收机安装在同一水平高度,所述第三通信接收机的安装高度高于其余两组通信接收机的安装高度。
作为一种具体的实施方式,所述通信接收机与主控单元之间采用4G方式通信连接。
作为一种具体的实施方式,所述充电对位系统还包括设置在停车场内的定位板,所述定位板的底部安装有反馈系统,所述发射线圈安装在所述定位板的底部。所述反馈系统用于在蓝牙信标定位出现干扰或信号反射存在偏移量时进行的反馈调整。
作为一种具体的实施方式,所述反馈系统包括若干呈阵列形式排布在定位板底部的反馈线圈。
本发明的另一个目的是提供一种基于蓝牙信标的电动汽车无线充电对位方法,包括以下步骤:
1)在本地内进行硬件设备的安装,安装完毕后上电,由操作人员携带信标广播器于发送线圈端开启广播信号,通信接收机在接收到广播信号后进行调制解调将数据传输给地面控制单元,地面控制单元再将数据上发至主控单元,在主控单元内完成直角坐标系的构建,同时主控单元存储发射线圈的坐标值与接收线圈的目标坐标,而地面控制单元进入睡眠状态;
2)待充电汽车驶入停车场内,安装在待充电汽车上的蓝牙信标发出广播信号,通信接收机在接收到蓝牙信标所发出的广播信号后,进行调制解调将数据传输给地面控制单元单元,地面控制单元根据广播信号的内容及接收数据的频率来判断通信接收机是否误发,若为误触发,则持续接收15S后,再次进入睡眠状态;若非误触发,进行步骤3)操作;
3)地面控制单元高频刷新接收的数据并将数据上发给主控单元,主控单元将得到的数据进行计算分析,确定接收线圈的实际坐标,并与存储的接收线圈的目标坐标比对后,将信息回传给地面控制单元,由地面控制单元调控接收线圈与发射线圈间的相对位置。
由于上述技术方案的运用,本发明与现有技术相比具有下列优点:本发明的充电对位系统,通过蓝牙信标直接定位接收线圈的位置,不再通过汽车位置进行隔层对位,既规避了不同品牌不同车型所造成的固定安装位置的差异性,也规避了接收线圈因故非正常位移所带来的问题;同时施加了外围反馈系统,规避了当蓝牙信标信号强度受到干扰而无负反馈控制闭环的问题;同时减少了由于驾驶人自行调整的时间和误差度。
附图说明
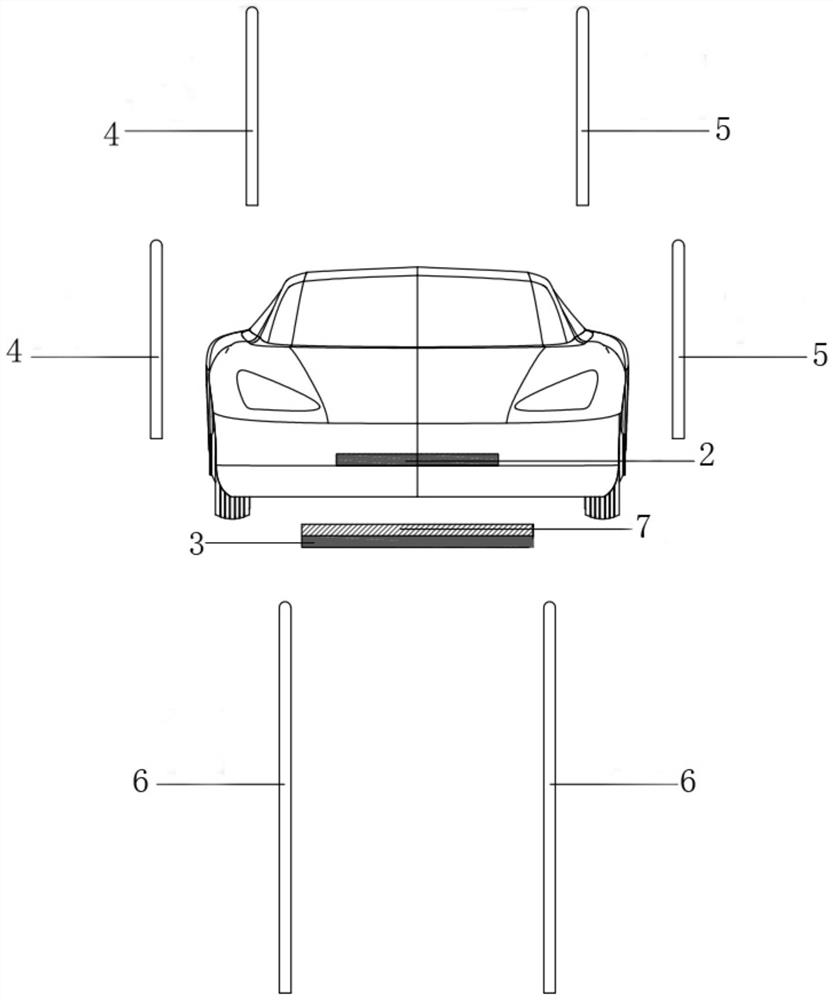
图1为本发明所述的基于蓝牙信标的电动汽车无线充电对位系统的结构示意图;
图2为图1的俯视图;
图3为采用本发明所述的基于蓝牙信标的电动汽车无线充电对位系统进行对位的流程图;
其中:1、蓝牙信标;2、接收线圈;3、发射线圈;4、第一组通信接收机;5、第二组通信接收机;6、第三组通信接收机;7、定位板。
具体实施方式
下面结合附图及具体实施例来对本发明的技术方案作进一步的阐述。
一种基于蓝牙信标的电动汽车无线充电对位系统,包括主控单元(图中未标示)、与主控单元通讯连接的地面控制单元(图中未标示)、设置在待充电汽车上的接收线圈2与蓝牙信标1、设置在停车场处的发射线圈3与通信接收机。
该通信接收机有多组,包括分别位于待充电汽车左、右两侧的第一组通信接收机4与第二组通信接收机5以及位于待充电汽车前侧的第三组通信接收机6,待充电汽车驶入停车场内后,蓝牙信标(定位信标)1发出广播信号,通信接收机在接收到广播信号后经调制解调将数据传输至地面控制单元(地面中控),由地面控制单元将数据上传给主控单元(服务器/计算单元),主控单元对接收到的数据进行计算分析,得到接收线圈2的实际坐标,而后与原先存储的接收线圈2的目标坐标进行比较后将信息回传给地面控制单元,由地面控制单元调控接收线圈2与发射线圈3间的相对位置,参见图3所示,具体的,该地面控制单元传输信号给应用层,由应用层调节接收线圈2与发射线圈3间的相对位置。
本例中,蓝牙信标1与接收线圈2同时安装在待充电汽车上,这样能够通过蓝牙信标1定位的方式得到接收线圈2的动态位置。这里的通信接收机采用了RX接收器,且三组通信接收机中每组均至少包含两个RX接收器。具体的,这里蓝牙信标1定位采用AOA(到达角)方式,通过安装于接收线圈2位置(接收线圈按国标与车企标准安装)的蓝牙设备在电动汽车进入充电区域时发出广播信号,通过RX接收器进行接收。
这里,第一组通信接收机4与第二组通信接收机5安装在同一水平高度,而第三组通信接收机6的安装高度高于其余两组通信接收机。整个布局为第一组通信接收机4、第二组通信接收机5、第三组通信接收机6各有2个,参见图1、2所示。
以第三组通信接收机6中2个RX接收器所在的直线为X轴,2个RX接收器连接所成的线段中点为X轴的零点,第一组通信接收机4或第二组通信接收机5中的2个RX接收器所在的直线为Y轴,2个RX接收器连接所成的线段中点为Y轴原点,从而构建直角坐标系。这里第三组通信接收机6的安装高度高于其余两组通信接收机的安装高度,其目的是通过一个高低差的正交,来提高二维坐标系定位时的精准度。
本例中,地面控制单元与主控单元之间采用4G方式通信连接。
这里,应用层可通过can口与地面控制单元连接,这里应用层可以是无人驾驶系统,也可以采用车载物联引导或本地投屏引导。
如采用无人驾驶系统,则无人驾驶系统框架上必然存在车载控制与云端通讯连接,这里,车载控制经由地面控制单元通过4G方式与云端进行通讯连接,由云端将数据直接传输给车载控制端;
若这里的应用层采用车载物联引导,即人为驾驶,将引导内容投射到车载物联系统上,由车载物联通过语音、可视化导航等方式引导驾驶人进行手动调整,因此其数据接口与上述相同,通过4G将数据传输至车载即可;
若这里的应用层采用本地投屏引导,则采用于充电桩前的人机界面投屏引导驾驶人进行自行调整,此应用不需要将数据输送至车端或云端,只需要安排一根串口接口将数据传输至充电桩本地控制让其投射至显示屏即可。
本例中,充电对位系统还包括设置在停车场内的定位板7,定位板7的底部安装有反馈系统,发射线圈3安装在定位板7的底部。反馈系统用于在蓝牙信标1定位出现干扰或信号反射存在偏移量时进行的反馈调整。该反馈系统包括若干呈阵列形式排布在定位板7底部的反馈线圈(图中未标示)。通过反馈线圈进行反馈电流采集,通过对反馈线圈进行X-Y轴的标号,可根据出现电涡流现象的端口信号得到当前x-y坐标偏差,由于若长时间开启会出现无线充电效率降低、略微发热的问题,因此该反馈系统只是用于在蓝牙信标1定位出现干扰或是信号反射存在偏移量时进行反馈调整,由于采用电涡流现象反馈,其精度与可靠度远超当前常用的光电传感器对车身测量的方案。
具体的,定位板7上的反馈线圈按位置进行编号排列,然后根据回流反馈目前编号来获取当前接收线圈2位置及调整偏移方位。
停车场处具体安装情况如下:参见图1所示,使用6根不锈钢支柱,将其按围绕式分布安装于停车位周围,汽车按标准安装接收线圈2停于位置内,6个RX接收器用于构建X-Y坐标系,车前两个RX接收器设置的高度高于车身左右两侧的RX接收器的高度。停车场处位于车底下方的硬件部分分为两层,上层为定位板7,下层为发射线圈3。
主控单元中直角坐标系的构建过程如下:
本地硬件设备安装好后,初次上电后并无坐标系与目标定位数据,安装人员随身携带信标广播器于发送线圈端开启广播信号,6个RX接收器接收到广播信号后,通过上述蓝牙AOA方式得到入射角位置,并通过调制解调将数据传输给地面控制单元,地面控制单元将数据上发至服务器(主控单元)中,确认是否6个RX接收器均通过调制解调上发数据到服务器中,如缺失,则服务器报错,显示接收器异常;服务器在接收到地面控制单元上传的数据以后,以车头2个RX接收器所在的直线为X轴,2个RX接收器连接所成的线段中点为X轴的零点,左右任一侧的2个RX接收器所在的直线为Y轴,2个RX接收器连接所成的线段中点为Y轴原点,从而构建X-Y直角坐标系;并定位当前发射线圈3,通过信标广播所在点位留存记忆于服务器中,记录接收线圈2所在的点位,亦为目标点位;此上为X-Y坐标系与零点、目标坐标的构建。
构建完毕后与服务器通讯连接的地面控制单元进入待机状态,地面控制单元上发数据为心跳包,以此告知服务器地面控制单元仍在工作,只是处于未激活状态;
当车辆带信标进入后,信标发出的广播被RX接收器接收到,地面控制单元被从睡眠状态中唤醒;唤醒后需要判断是否为误触发,此操作可使用广播信号内容与接收频率来判断,若为误触发,则持续接收15S后,再次进入睡眠状态;若非误触发,则高频刷新接收信息并上传服务器来刷新接收线圈的实际坐标,服务器进行计算得到接收线圈的实际坐标后,通过算法计算返回导航信息于地面控制单元,供使用。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
- 一种基于蓝牙信标的电动汽车无线充电对位系统及方法
- 一种基于智能位置感知技术的电动汽车无线充电可视化对位引导系统及方法