龙门料框搬运机械手
文献发布时间:2023-06-19 10:40:10
技术领域
本发明属于料框搬运技术领域,特别是涉及一种龙门料框搬运机械手。
背景技术
龙门料框搬运机械手是将料框搬运到传送带上的半自动运行装置,市面上的大部分的龙门料框搬运机械手抓取效率低,抓取位置设定后,需要人工进行摆放、整理,降低了龙门框搬运机械手的实用性。
发明内容
本发明的目的在于提供一种龙门料框搬运机械手,通过在两组支撑架一侧设置的X方向移动轴、Y方向移动轴、Z方向移动轴,使龙门料框搬运机械手能多方位进行移动,从而提高了龙门料框搬运机械手的灵活性,通过设置的导向装置,能便于员工对料框进行定位、摆正,从而提高了龙门料框搬运机械手的实用性,通过设置的压紧气缸,能对填充的料框进行固定,从而进一步提高了龙门料框搬运机械手的实用性,解决了上述现有技术中存在的问题。
为达上述目的,本发明是通过以下技术方案实现的:
一种龙门料框搬运机械手,包括两组支撑架,两组支撑架之间的上部安装有两个X方向移动轴,X方向移动轴之间安装有Y方向移动轴,Y方向移动轴一侧安装有Z方向移动轴,Z方向移动轴的一端安装有夹持组件,两组支撑架之间安装有两组导向装置;
夹持组件包括固定板,固定板中部与Z方向移动轴的一端固定连接,固定板上侧的两端均布安装有两个直线导轨,两个直线导轨之间装设有夹具气缸,两个直线导轨上侧滑动配合有与夹具气缸相对应的夹爪,导向装置上侧均布安装有压紧气缸。
可选的,支撑架包括两个支撑腿,两个支撑腿之间安装有安全围栏,两个支撑腿之间的上部安装有横杆。
可选的,Y方向移动轴的一侧的一端安装有与X方向移动轴相对应的第一移动电机,Y方向移动轴的一侧的另一端安装有与X方向移动轴相对应的滑块。
可选的,Z方向移动轴上侧安装有与Y方向移动轴相对应的第二移动电机,Z方向移动轴的周侧安装有升降电机。
可选的,夹爪包括两个与直线导轨相对应的滑板,两个滑板的一侧安装有夹板。
可选的,导向装置包括两个固定板,固定板的一端倾斜安装有导向板,两个导向板形呈漏斗状,固定板上侧靠近导向板的一端与压紧气缸固定连接。
本发明的实施例具有以下有益效果:
本发明的一个实施例通过在两组支撑架一侧设置的X方向移动轴、Y方向移动轴、Z方向移动轴,使龙门料框搬运机械手能多方位进行移动,从而提高了龙门料框搬运机械手的灵活性,通过设置的导向装置,能便于员工对料框进行定位、摆正,从而提高了龙门料框搬运机械手的实用性,通过设置的压紧气缸,能对填充的料框进行固定,从而进一步提高了龙门料框搬运机械手的实用性。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
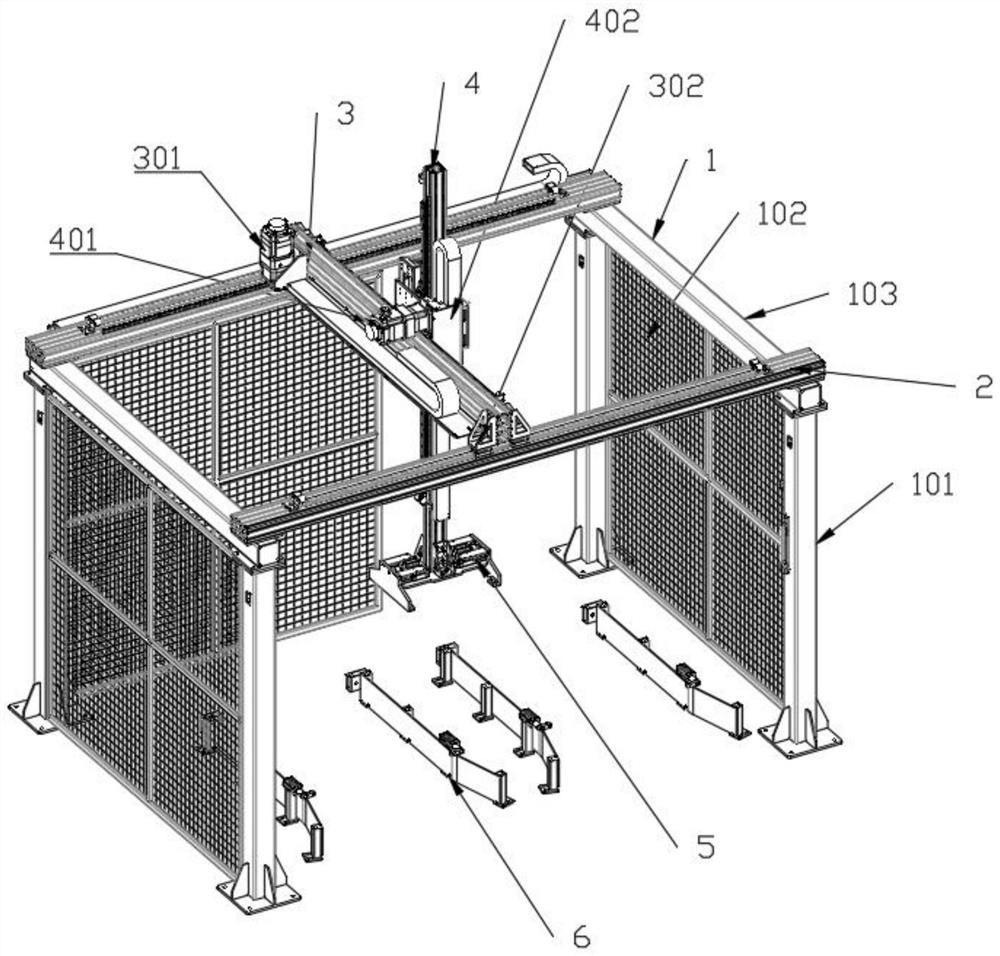
图1为本发明一实施例的龙门料框搬运机械手结构示意图;
图2为本发明一实施例的夹持组件结构示意图;
图3为本发明一实施例的导向装置结构示意图。
其中,上述附图包括以下附图标记:
两组支撑架1,支撑腿101,安全围栏102,横杆103,X方向移动轴2,Y方向移动轴3,第一移动电机301,滑块302,Z方向移动轴4,第二移动电机401,升降电机402,夹持组件5,导向装置6,固定板601,导向板602,直线导轨7,夹具气缸8,夹爪9,滑板901,夹板902,压紧气缸10。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。
为了保持本发明实施例的以下说明清楚且简明,本发明省略了已知功能和已知部件的详细说明。
请参阅图1-3所示,在本实施例中提供了一种龙门料框搬运机械手,包括:两组支撑架1,两组支撑架1之间的上部安装有两个X方向移动轴2,X方向移动轴2之间安装有Y方向移动轴3,Y方向移动轴3一侧安装有Z方向移动轴4,Z方向移动轴4的一端安装有夹持组件5,两组支撑架1之间安装有两组导向装置6;
夹持组件5包括固定板6,固定板6中部与Z方向移动轴4的一端固定连接,固定板6上侧的两端均布安装有两个直线导轨7,两个直线导轨7之间装设有夹具气缸8,两个直线导轨7上侧滑动配合有与夹具气缸8相对应的夹爪9,导向装置6上侧均布安装有压紧气缸10。
本实施例一个方面的应用为:需要使用龙门料框搬运机械手时,将待搬运料框放置在导向装置6内,启动龙门料框搬运机械手,压紧气缸10对带搬运料框进行固定,夹持组件5通过两个X方向移动轴2、Y方向移动轴3、Z方向移动轴4进行移动,夹持组件5对料框进行夹持,即可使用龙门料框搬运机械手。需要注意的是,本申请中所涉及的所有用电设备可通过蓄电池供电或外接电源。
通过在两组支撑架1一侧设置的X方向移动轴2、Y方向移动轴3、Z方向移动轴4,使龙门料框搬运机械手能多方位进行移动,从而提高了龙门料框搬运机械手的灵活性,通过设置的导向装置6,能便于员工对料框进行定位、摆正,从而提高了龙门料框搬运机械手的实用性,通过设置的压紧气缸10,能对填充的料框进行固定,从而进一步提高了龙门料框搬运机械手的实用性。
本实施例的支撑架1包括两个支撑腿101,两个支撑腿101之间安装有安全围栏102,两个支撑腿101之间的上部安装有横杆103。
本实施例的Y方向移动轴3的一侧的一端安装有与X方向移动轴2相对应的第一移动电机301,Y方向移动轴3的一侧的另一端安装有与X方向移动轴2相对应的滑块302。
本实施例的Z方向移动轴4上侧安装有与Y方向移动轴3相对应的第二移动电机401,Z方向移动轴4的周侧安装有升降电机402。
本实施例的夹爪9包括两个与直线导轨7相对应的滑板901,两个滑板901的一侧安装有夹板902。
本实施例的导向装置6包括两个固定板601,固定板601的一端倾斜安装有导向板602,两个导向板602形呈漏斗状,固定板601上侧靠近导向板602的一端与压紧气缸10固定连接。
上述实施例可以相互结合。
需要说明的是,本申请的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
- 龙门料框搬运机械手
- 一种龙门桁架式搬运机械手