用于空空导弹拖靶的遥控系统
文献发布时间:2023-06-19 11:08:20
技术领域
本发明属于拖靶技术领域,具体来说,涉及一种用于空空导弹拖靶的遥控系统。
背景技术
航空拖靶是由拖靶载机拖曳的可重复使用的自身无动力空中飞行器,通常作为空中靶标使用。当用作空中靶标时,航空拖靶可实现对反舰导弹外弹道及微波、红外、可见光、激光、电视等目标特性的模拟,既可以执行用于航空反导武器系统试验的低空掠海飞行任务,也可以执行用于防空部队射击训练的中高空飞行任务。同时,航空拖靶还可以在靶场新建测控装备的验收考核和反舰导弹武器试验的合练中发挥作用。除用作空中靶标以外,搭载测量装置或航空摄像头的拖靶系统还可兼做航空吊舱,完成航测和航拍等特殊航空任务。
发明内容
为了解决上述现有技术的不足之处,本发明的目的在于提供一种用于空空导弹拖靶的遥控系统,以克服现有技术中的缺陷。
为了实现上述目的,本发明提供了一种用于空空导弹拖靶的遥控系统,包括靶机控制模块和靶标控制模块;其中,所述靶机控制模块包括设置在遥控终端的遥控指令发射模块,设置在靶机上的遥控指令接收模块、处理器模块、北斗定位导航模块和飞行控制模块;遥控指令发射模块与遥控指令接收模块信号连接,遥控指令接收模块与处理器模块电连接和信号连接,遥控指令发射模块用于遥控终端发射控制靶机和靶标的控制信号,遥控指令接收模块用于靶机接收控制靶机和靶标的控制信号,处理器模块用于处理和执行控制靶机和靶标的控制信号;处理器模块分别与北斗定位导航模块和飞行控制模块电连接和信号连接,北斗定位导航模块与飞行控制模块电连接和信号连接,北斗定位导航模块用于根据控制信号控制靶机的飞行路线,飞行控制模块用于根据控制信号控制靶机的飞行状态;所述靶标控制模块包括设置在靶机上的靶标释放模块、设置在靶标上的命中反馈模块;靶标释放模块和命中反馈模块分别与处理器模块电连接和信号连接,靶标释放模块用于根据控制信号控制将靶标从靶机内释放出来,以及将靶标与靶机脱离,命中反馈模块用于获取靶标的命中次数和命中距离并传输至处理器模块。
通过上述技术方案,在拖靶靶机上设置飞行控制模块和靶标释放模块,由遥控终端对靶机进行控制实现靶机的飞行及飞行状态控制,以及对靶标从靶机内释放和与靶机脱离进行控制,以满足空空导弹的演习和试验需要提供攻击目标。
作为对本发明所述的用于空空导弹拖靶的遥控系统的进一步说明,优选地,所述靶机控制模块包括设置在靶机上的雷达模拟器和红外模拟器,雷达模拟器和红外模拟器分别与处理器模块电连接和信号连接,雷达模拟器用于根据控制信号发出雷达模拟信号,红外模拟器用于根据控制信号发出红外模拟信号。
通过上述技术方案,在靶机上设置雷达模拟器和红外模拟器,雷达模拟器能模拟雷达反射,通过红外模拟器能模拟红外反射,满足对空空导弹的演习和试验需要。
作为对本发明所述的用于空空导弹拖靶的遥控系统的进一步说明,优选地,所述靶机控制模块包括设置在靶机上的无线电高度计,无线电高度计与处理器模块电连接和信号连接,无线电高度计用于获取靶机的飞行高度并传输至处理器模块。
通过上述技术方案,通过无线电高度计检测靶机的飞行高度,实现在靶机起飞后可以控制在允许高度将靶标从靶机内释放出来,在靶标命中后可以控制在允许高度将靶标与靶机脱离的目的。
作为对本发明所述的用于空空导弹拖靶的遥控系统的进一步说明,优选地,所述靶机控制模块包括设置在靶机上的惯性传感器,惯性传感器与处理器模块电连接和信号连接,惯性传感器用于获取靶机的飞行数据并传输至处理器模块。
通过上述技术方案,通过惯性传感器可以获取靶机的飞行数据,处理器模块根据靶机的飞行数据可以控制飞行控制模块调整靶机的飞行状态,为靶机的稳定飞行提高了安全性。
作为对本发明所述的用于空空导弹拖靶的遥控系统的进一步说明,优选地,飞行控制模块与驱动靶机飞行的涡喷发动机、驱动水平尾翼摆动的第一助推器、驱动垂直尾翼摆动的第二助推器和设置在靶机尾部并驱动靶机加速的第三助推器电连接和信号连接。
通过上述技术方案,飞行控制模块与涡喷发动机、第一助推器、第二助推器和第三助推器连接,通过遥控终端的控制信号实现靶机按飞行路线飞行、蛇形机动、突然加速的目的,利用第一助推器和第二助推器实现水平尾翼和垂直尾翼的周期摆动,使拖靶在空中不沿直线飞行,利用第三助推器使拖靶突然获得大速度飞行,模拟导弹的最后攻击。
本发明的有益效果:
1、本发明在拖靶靶机上设置飞行控制模块和靶标释放模块,由遥控终端对靶机进行控制实现靶机的飞行及飞行状态控制,以及对靶标从靶机内释放和与靶机脱离进行控制,以满足空空导弹的演习和试验需要提供攻击目标。
2、本发明通过无线电高度计检测靶机的飞行高度,实现在靶机起飞后可以控制在允许高度将靶标从靶机内释放出来,在靶标命中后可以控制在允许高度将靶标与靶机脱离的目的;通过惯性传感器可以获取靶机的飞行数据,处理器模块根据靶机的飞行数据可以控制飞行控制模块调整靶机的飞行状态,为靶机的稳定飞行提高了安全性。
3、本发明的飞行控制模块与涡喷发动机、第一助推器、第二助推器和第三助推器连接,通过遥控终端的控制信号实现靶机按飞行路线飞行、蛇形机动、突然加速的目的,利用第一助推器和第二助推器实现水平尾翼和垂直尾翼的周期摆动,使拖靶在空中不沿直线飞行,利用第三助推器使拖靶突然获得大速度飞行,模拟导弹的最后攻击。
附图说明
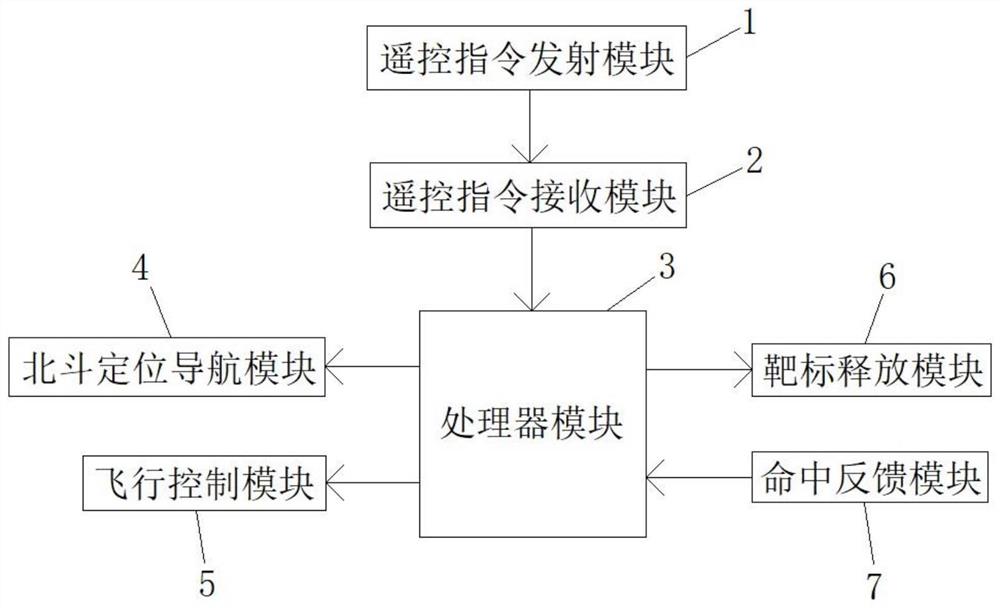
图1是本发明的用于空空导弹拖靶的遥控系统的结构示意图。
图2是本发明的靶机控制模块的连接关系示意图。
图3是本发明的飞行控制模块的连接关系示意图。
具体实施方式
为了能够进一步了解本发明的结构、特征及其他目的,现结合所附较佳实施例附以附图详细说明如下,本附图所说明的实施例仅用于说明本发明的技术方案,并非限定本发明。
首先,请参考图1,图1是本发明的用于空空导弹拖靶的遥控系统的结构示意图。用于空空导弹拖靶的遥控系统包括靶机控制模块和靶标控制模块;其中,所述靶机控制模块包括设置在遥控终端的遥控指令发射模块1,设置在靶机上的遥控指令接收模块2、处理器模块3、北斗定位导航模块4和飞行控制模块5;遥控指令发射模块1与遥控指令接收模块2信号连接,遥控指令接收模块2与处理器模块3电连接和信号连接,遥控指令发射模块1用于遥控终端发射控制靶机和靶标的控制信号,遥控指令接收模块2用于靶机接收控制靶机和靶标的控制信号,处理器模块3用于处理和执行控制靶机和靶标的控制信号;处理器模块3分别与北斗定位导航模块4和飞行控制模块5电连接和信号连接,北斗定位导航模块4与飞行控制模块5电连接和信号连接,北斗定位导航模块4用于根据控制信号控制靶机的飞行路线,飞行控制模块5用于根据控制信号控制靶机的飞行状态;所述靶标控制模块包括设置在靶机上的靶标释放模块6、设置在靶标上的命中反馈模块7;靶标释放模块6和命中反馈模块7分别与处理器模块3电连接和信号连接,靶标释放模块6用于根据控制信号控制将靶标从靶机内释放出来,以及将靶标与靶机脱离,命中反馈模块7用于获取靶标的命中次数和命中距离并传输至处理器模块3。在拖靶靶机上设置飞行控制模块和靶标释放模块,由遥控终端对靶机进行控制实现靶机的飞行及飞行状态控制,以及对靶标从靶机内释放和与靶机脱离进行控制,以满足空空导弹的演习和试验需要提供攻击目标。
请参看图2,所述靶机控制模块包括设置在靶机上的雷达模拟器8和红外模拟器9,雷达模拟器8和红外模拟器9分别与处理器模块3电连接和信号连接,雷达模拟器8用于根据控制信号发出雷达模拟信号,红外模拟器9用于根据控制信号发出红外模拟信号。通过雷达模拟器能模拟雷达反射,通过红外模拟器能模拟红外反射,满足对空空导弹的演习和试验需要。
请参看图2,所述靶机控制模块包括设置在靶机上的无线电高度计10,无线电高度计10与处理器模块3电连接和信号连接,无线电高度计10用于获取靶机的飞行高度并传输至处理器模块3。通过无线电高度计检测靶机的飞行高度,实现在靶机起飞后可以控制在允许高度将靶标从靶机内释放出来,在靶标命中后可以控制在允许高度将靶标与靶机脱离的目的。
请参看图2,所述靶机控制模块包括设置在靶机上的惯性传感器11,惯性传感器11与处理器模块3电连接和信号连接,惯性传感器11用于获取靶机的飞行数据并传输至处理器模块3。通过惯性传感器可以获取靶机的飞行数据,处理器模块根据靶机的飞行数据可以控制飞行控制模块调整靶机的飞行状态,为靶机的稳定飞行提高了安全性。
请参看图3,飞行控制模块5与驱动靶机飞行的涡喷发动机12、驱动水平尾翼摆动的第一助推器13、驱动垂直尾翼摆动的第二助推器14和设置在靶机尾部并驱动靶机加速的第三助推器15电连接和信号连接。飞行控制模块与涡喷发动机、第一助推器、第二助推器和第三助推器连接,通过遥控终端的控制信号实现靶机按飞行路线飞行、蛇形机动、突然加速的目的,利用第一助推器和第二助推器实现水平尾翼和垂直尾翼的周期摆动,使拖靶在空中不沿直线飞行,利用第三助推器使拖靶突然获得大速度飞行,模拟导弹的最后攻击。
需要声明的是,上述发明内容及具体实施方式意在证明本发明所提供技术方案的实际应用,不应解释为对本发明保护范围的限定。本领域技术人员在本发明的精神和原理内,当可作各种修改、等同替换或改进。本发明的保护范围以所附权利要求书为准。
- 用于空空导弹拖靶的遥控系统
- 用于空空导弹拖靶的遥控系统