穴位识别定位方法、系统、艾灸机器人及存储介质
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及医疗器械领域,尤其涉及一种穴位识别定位方法、系统、艾灸机器人及存储介质。
背景技术
艾灸是用艾叶制成的艾灸材料产生的艾热刺激体表穴位或特定部位,通过激发经气的活动来调整人体紊乱的生理生化功能,从而达到防病治病目的的一种治疗方法。
在当今忙碌的工作生活之余,越来越多的人对艾灸调理感兴趣并开始尝试使用了。对于现代人,尤其是刚接触不久的新手,艾灸时往往找不准对应的穴位,这会让艾灸的效果大打折扣。
发明内容
本发明的目的在于提供一种穴位识别定位方法、系统、艾灸机器人及存储介质,能够快速准确地识别定位人体穴位,为用户的艾灸理疗提供科学、系统、专业性的指导与帮助。
为实现上述目的,提供以下技术方案:
第一方面,本发明提供了一种穴位识别定位方法,包括:
S1、采集待艾灸人体的特征图像,并进行图像预处理;
S2、展开人体穴位图,并扫描获取预设穴位的参考图像;
S3、比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
S4、上传并存储待艾灸人体的穴位信息。
进一步地,获取待艾灸人体的身份信息,并提供常用的穴位信息。
进一步地,通过中值滤波和高斯滤波对图像数据进行降噪处理,采用直方图均衡化消除图像数据的亮度差异。
进一步地,当用户身体部位为上肢部阳面时,将商阳穴、关冲穴、少泽穴作为特征穴位基准点;当用户身体部位为上肢部阴面时,将少商穴、中冲穴、少冲穴作为特征穴位基准点;当用户身体部位为头部、胸腹胁部、下肢部时,将隐白穴、大墩穴、厉兑穴、足窍阴穴、至阴穴、神阙穴、晴明穴作为特征穴位基准点;当用户身体部位为胸背部时,将大椎穴作为特征穴位基准点。
第二方面,本发明还提供了一种穴位识别定位系统,包括:
深度相机,用于采集待艾灸人体的特征图像;
扫描模块,用于扫描获取人体穴位图预设穴位的参考图像;
比对模块,用于比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
展开装置,用于展开人体穴位图。
进一步地,所述展开装置包括收纳盒、第一支架和第二支架,所述收纳盒用于收纳所述人体穴位图,所述第一支架和所述第二支架的间距可调,所述收纳盒设置于所述第一支架上,所述人体穴位图的一侧连接于所述收纳盒内,另一侧连接于所述第二支架上。
进一步地,所述人体穴位图的两侧分别设置有支撑条和螺丝,所述支撑条通过所述螺丝转动连接于所述收纳盒内或所述第二支架上。
进一步地,所述展开装置还包括挠性臂和艾灸盒,所述艾灸盒通过所述挠性臂连接于所述第一支架或所述第二支架上。
第三方面,本发明还提供了一种艾灸机器人,所述艾灸机器人包括:
一个或多个处理器;
存储装置,用于存储一个或多个程序;
当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如上所述的穴位识别定位方法。
第四方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序该程序被处理器执行时实现如上所述的穴位识别定位方法。
与现有技术相比,本发明提供的穴位识别定位方法、系统、艾灸机器人及存储介质中,适用于个性化艾灸理疗,首先,通过深度相机采集待艾灸人体的特征图像,并进行图像预处理;其次,通过展开装置展开人体穴位图,并通过扫描模块扫描获取预设穴位的参考图像;然后,通过比对模块比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;最后,上传并存储待艾灸人体的穴位信息,能够快速准确地识别定位人体穴位,为用户的艾灸理疗提供科学、系统、专业性的指导与帮助。
附图说明
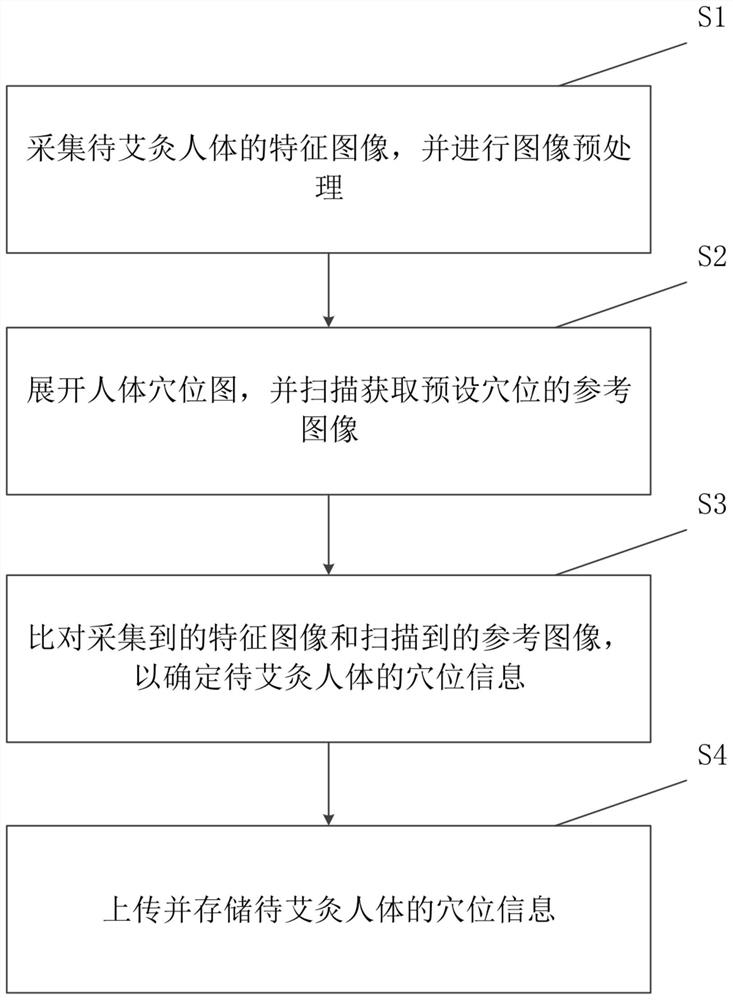
图1为本发明实施例一提供的穴位识别定位方法的流程图;
图2为本发明实施例三提供的艾灸机器人的结构示意图。
具体实施方式
为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案作进一步地详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
图1为本实施例提供的穴位识别定位方法的流程图,如图1所示,该穴位识别定位方法包括如下步骤:
S1、采集待艾灸人体的特征图像,并进行图像预处理;
S2、展开人体穴位图,并扫描获取预设穴位的参考图像;
S3、比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
S4、上传并存储待艾灸人体的穴位信息。
其中,可以通过深度相机采集待艾灸人体的特征图像。展开人体穴位图时,可以采用收纳方便的展开装置进行展开。比对采集到的特征图像和扫描到的参考图像时,需要对图像进行降噪处理。
进一步地,获取待艾灸人体的身份信息,并提供常用的穴位信息。用户可以通过扫描二维码进行个人账户登录,省去每次设定参数的麻烦。个人账户的个人信息可以包括性别、年龄、身高、体重等一系列数据。通过对比用户基本信息与大数据中存储数据,可对穴位定位任务进行适当修正,最终为用户提供最佳的经络穴位。
进一步地,通过中值滤波和高斯滤波对图像数据进行降噪处理,采用直方图均衡化消除图像数据的亮度差异。中值滤波法是一种非线性平滑技术,它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。中值滤波是基于排序统计理论的一种能有效抑制噪声的非线性信号处理技术,中值滤波的基本原理是把数字图像或数字序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的像素值接近的真实值,从而消除孤立的噪声点。
高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。通俗的讲,高斯滤波就是对整幅图像进行加权平均的过程,每一个像素点的值,都由其本身和邻域内的其他像素值经过加权平均后得到。高斯滤波的具体操作是:用一个模板(或称卷积、掩模)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。图像大多数噪声均属于高斯噪声,因此高斯滤波器应用也较广泛。高斯滤波是一种线性平滑滤波,适用于消除高斯噪声。高斯滤波的具体操作是:用一个用户指定的模板(或称卷积、掩膜)去扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
直方图均衡化又称直方图平坦化,实质上是对图像进行非线性拉伸,重新分配图像像素值,使一定灰度范围内像素值的数量大致相等。这样,原来直方图中间的峰顶部分对比度得到增强,而两侧的谷底部分对比度降低,输出图像的直方图是一个较平的分段直方图:如果输出数据分段值较小的话,会产生粗略分类的视觉效果。直方图是表示数字图像中每一灰度出现频率的统计关系。直方图能给出图像灰度范围、每个灰度的频度和灰度的分布、整幅图像的平均明暗和对比度等概貌性描述。
根据识别到的用户身体部位的不同,确定的特征穴位基准点有所不同。进一步地,当用户身体部位为上肢部阳面时,将商阳穴、关冲穴、少泽穴作为特征穴位基准点;当用户身体部位为上肢部阴面时,将少商穴、中冲穴、少冲穴作为特征穴位基准点;当用户身体部位为头部、胸腹胁部、下肢部时,将隐白穴、大墩穴、厉兑穴、足窍阴穴、至阴穴、神阙穴、晴明穴作为特征穴位基准点;当用户身体部位为胸背部时,将大椎穴作为特征穴位基准点。
本实施例提供的穴位识别定位方法,适用于个性化艾灸理疗,首先,采集待艾灸人体的特征图像,并进行图像预处理;其次,展开人体穴位图,并扫描获取预设穴位的参考图像;然后,比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;最后,上传并存储待艾灸人体的穴位信息,能够快速准确地识别定位人体穴位,为用户的艾灸理疗提供科学、系统、专业性的指导与帮助。
实施例二
本实施例提供一种穴位识别定位系统,可适用于个性化艾灸理疗。本发明实施例提供的穴位识别定位系统可执行本发明实施例所提供的穴位识别定位方法,具备执行方法相应的功能模块和有益效果。
该穴位识别定位系统包括:
深度相机,用于采集待艾灸人体的特征图像;
扫描模块,用于扫描获取人体穴位图预设穴位的参考图像;
比对模块,用于比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
展开装置,用于展开人体穴位图。
进一步地,展开装置包括收纳盒、第一支架和第二支架,收纳盒用于收纳人体穴位图,第一支架和第二支架的间距可调,收纳盒设置于第一支架上,人体穴位图的一侧连接于收纳盒内,另一侧连接于第二支架上。通过调节第一支架和第二支架的间距,使位于收纳盒中的人体穴位图展开,以方便扫描模块进行扫描以及用户实时查看,使用方便,占用空间小。
进一步地,人体穴位图的两侧分别设置有支撑条和螺丝,支撑条通过螺丝转动连接于收纳盒内或第二支架上。通过支撑条固定人体穴位图的侧边,使其完全展开。通过旋拧螺钉,调节人体穴位图相对扫描模块或用户视角的夹角,方便扫描或查看。
进一步地,展开装置还包括挠性臂和艾灸盒,艾灸盒通过挠性臂连接于第一支架或第二支架上。通过挠性臂改变艾灸盒的位置和姿态,使艾灸盒更方便收纳或使用。
本实施例提供的穴位识别定位系统,适用于个性化艾灸理疗,首先,通过深度相机采集待艾灸人体的特征图像,并进行图像预处理;其次,通过展开装置展开人体穴位图,并通过扫描模块扫描获取预设穴位的参考图像;然后,通过比对模块比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;最后,上传并存储待艾灸人体的穴位信息,能够快速准确地识别定位人体穴位,为用户的艾灸理疗提供科学、系统、专业性的指导与帮助。
实施例三
图2为本实施例中的艾灸机器人的结构示意图。图2示出了适于用来实现本发明实施方式的示例性艾灸机器人412的框图。图2显示的艾灸机器人412仅仅是一个示例,不应对本发明实施例的功能和使用范围带来任何限制。
如图2所示,艾灸机器人412以通用终端的形式表现。艾灸机器人412的组件可以包括但不限于:艾灸机器人本体(图中未示出)、一个或者多个处理器416,存储装置428,连接不同系统组件(包括存储装置428和处理器416)的总线418。
总线418表示几类总线结构中的一种或多种,包括存储装置总线或者存储装置控制器,外围总线,图形加速端口,处理器或者使用多种总线结构中的任意总线结构的局域总线。举例来说,这些体系结构包括但不限于工业标准体系结构(Industry SubversiveAlliance,ISA)总线,微通道体系结构(Micro Channel Architecture,MAC)总线,增强型ISA总线、视频电子标准协会(Video Electronics Standards Association,VESA)局域总线以及外围组件互连(Peripheral Component Interconnect,PCI)总线。
艾灸机器人412典型地包括多种计算机系统可读介质。这些介质可以是任何能够被艾灸机器人412访问的可用介质,包括易失性和非易失性介质,可移动的和不可移动的介质。
存储装置428可以包括易失性存储器形式的计算机系统可读介质,例如随机存取存储器(Random Access Memory,RAM)430和/或高速缓存存储器432。艾灸机器人412可以进一步包括其它可移动/不可移动的、易失性/非易失性计算机系统存储介质。仅作为举例,存储系统434可以用于读写不可移动的、非易失性磁介质(图2未显示,通常称为“硬盘驱动器”)。尽管图2中未示出,可以提供用于对可移动非易失性磁盘(例如“软盘”)读写的磁盘驱动器,以及对可移动非易失性光盘,例如只读光盘(Compact Disc Read-Only Memory,CD-ROM),数字视盘(Digital Video Disc-Read Only Memory,DVD-ROM)或者其它光介质)读写的光盘驱动器。在这些情况下,每个驱动器可以通过一个或者多个数据介质接口与总线418相连。存储装置428可以包括至少一个程序产品,该程序产品具有一组(例如至少一个)程序模块,这些程序模块被配置以执行本发明各实施例的功能。
具有一组(至少一个)程序模块442的程序/实用工具440,可以存储在例如存储装置428中,这样的程序模块442包括但不限于操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。程序模块442通常执行本发明所描述的实施例中的功能和/或方法。
艾灸机器人412也可以与一个或多个外部设备414(例如键盘、指向终端、显示器424等)通信,还可与一个或者多个使得用户能与该艾灸机器人412交互的终端通信,和/或与使得该艾灸机器人412能与一个或多个其它计算终端进行通信的任何终端(例如网卡,调制解调器等等)通信。这种通信可以通过输入/输出(I/O)接口422进行。并且,艾灸机器人412还可以通过网络适配器420与一个或者多个网络(例如局域网(Local Area Network,LAN),广域网(Wide Area Network,WAN)和/或公共网络,例如因特网)通信。如图2所示,网络适配器420通过总线418与艾灸机器人412的其它模块通信。应当明白,尽管图中未示出,可以结合艾灸机器人412使用其它硬件和/或软件模块,包括但不限于:微代码、终端驱动器、冗余处理器、外部磁盘驱动阵列、磁盘阵列(Redundant Arrays of IndependentDisks,RAID)系统、磁带驱动器以及数据备份存储系统等。
处理器416通过运行存储在存储装置428中的程序,从而执行各种功能应用以及数据处理,例如实现本发明实施例所提供的穴位识别定位方法,该方法包括:
S1、采集待艾灸人体的特征图像,并进行图像预处理;
S2、展开人体穴位图,并扫描获取预设穴位的参考图像;
S3、比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
S4、上传并存储待艾灸人体的穴位信息。
实施例四
本实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例所提供的穴位识别定位方法,该方法包括:
S1、采集待艾灸人体的特征图像,并进行图像预处理;
S2、展开人体穴位图,并扫描获取预设穴位的参考图像;
S3、比对采集到的特征图像和扫描到的参考图像,以确定待艾灸人体的穴位信息;
S4、上传并存储待艾灸人体的穴位信息。
本发明实施例的计算机存储介质,可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(RAM)、只读存储器(ROM)、可擦式可编程只读存储器(EPROM或闪存)、光纤、便携式紧凑磁盘只读存储器(CD-ROM)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的程序代码。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。
计算机可读介质上包含的程序代码可以用任何适当的介质传输,包括——但不限于无线、电线、光缆、RF等等,或者上述的任意合适的组合。
可以以一种或多种程序设计语言或其组合来编写用于执行本发明操作的计算机程序代码,所述程序设计语言包括面向对象的程序设计语言—诸如Java、Smalltalk、C++,还包括常规的过程式程序设计语言—诸如“C”语言或类似的程序设计语言。程序代码可以完全地在用户计算机上执行、部分地在用户计算机上执行、作为一个独立的软件包执行、部分在用户计算机上部分在远程计算机上执行、或者完全在远程计算机或终端上执行。在涉及远程计算机的情形中,远程计算机可以通过任意种类的网络——包括局域网(LAN)或广域网(WAN)—连接到用户计算机,或者,可以连接到外部计算机(例如利用因特网服务提供商来通过因特网连接)。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 穴位识别定位方法、系统、艾灸机器人及存储介质
- 曲面隔离式艾灸方法、系统、艾灸机器人及存储介质