一种大角度翻转机构及自动扣包布机
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及翻转设备技术领域,尤其涉及一种大角度翻转机构及自动扣包布机。
背景技术
目前,在工业智能制造技术领域,工业机器人已经得到广泛的应用。在扣包布工业领域,通过工业机器人进行全自动化加工时,由于包布固有的较软的特性以及需要包绕固定的角度,一般情况下,包布通过定位套被定点固定后,需要公转和自转相配合形成一定的转速比才能使包布包绕产品到位时,包布原来的固定位置能够贴紧产品并挂接在产品对应的螺柱上,以便于后续工序的进行,满足工艺要求。工序越复杂,工业机器人也就越复杂,同时还会占用较大的工作场地;另外,越复杂的工业机器人所带来的成本也就越高,尤其对于中小型企业是一种很大的负担;第三,工业机器人操作原理以及结构都比较复杂,难以维护和维修。
另外,大多数企业通过人工包裹包布或者人工半自动化包裹包布。但是,包裹效率较低,包裹状态难以被有效控制,导致产品难以达到一致的合格的包裹质量。
发明内容
本发明的主要目的在于提供一种大角度翻转机构,通过转动元件提供动力输出,通过翻转传动机构使移动板相对固定板能够进行大角度翻转,同时通过自转传动机构使第二齿轮带动曲臂进行自转,能够同时定向翻转和定向自转,达到全自动化包裹包布的目的。
本发明的另一目的在于提供一种大角度翻转机构,仅通过一个动力源提供动力输出,通过机械传动的方式实现翻转机构的同步翻转和自转,结构简单且相对紧凑,能够有效减小场地占用空间,易于维护和维修,能够有效提高生产效率,提升产品品质。
本发明的另一目的在于提供一种大角度翻转机构,通过沿移动板的旋转路径设置多个第一传感器能够使悬臂自动翻转预定的角度,从而成型出不同的形状或包裹出不同的包绕范围。
本发明的另一目的在于提供一种大角度翻转机构,通过调节第二同步带轮和第二齿轮的转速比能够灵活调整悬臂翻转时自转速度。
本发明的另一目的在于提供一种大角度翻转机构,配合升降元件灵活调整悬臂的竖直旋转范围,而配合水平驱动元件灵活调整悬臂的水平转动范围,能够大大增加该翻转机构的工作范围。
本发明的另一目的在于提供一种大角度翻转机构,通过沿丝杆的传动方向设置多个第二传感器使该翻转机构的使用更加安全,控制更加灵活。
本发明的另一主要目的在于提供一种自动扣包机,在大角度翻转机构的基础上通过在悬臂的另一端设置包布固定装置和包布感应装置,能够在固定包布后将包布包绕出预定的形状,自动化程度高,具有非常高的工作效率和加工质量。
为实现本发明以上至少一个目的,第一方面,本发明提供一种大角度翻转机构,其中所述翻转机构包括:
一固定板,其具有相对的一正面和一反面,其中所述固定板于其顶部靠近长度方向的其中一端同向设置有安装板;
一移动板,其被可转动地设置于所述安装板,其中所述移动板固定垂直嵌设有第一旋转轴,而所述第一旋转轴被可转动地垂直嵌设于所述安装板,以使所述移动板远离所述安装板的一端能够沿所述固定板所在的平面以所述第一旋转轴为旋转轴心进行转动,其中所述移动板具有与所述正面和所述反面相对应的第一安装面和第二安装面;
一转动元件,其被固定安装于所述固定板的反面,其中所述转动元件具有一转动端,所述转动端朝所述正面延伸而贯穿所述固定板,形成一动力部;
一传动装置,其包括一翻转传动机构和一自转传动机构,其中所述翻转传动机构包括被固定套设于所述动力部的第一同步带轮、被固定套设于所述第一旋转轴的第二同步带轮和传动所述第一同步带轮和所述第二同步带轮的第一传动元件,其中所述第二同步带轮被设置靠近所述第一安装面,其中所述自转传动机构包括被设置靠近所述第二安装面的第一齿轮、第二齿轮和传动所述第一齿轮和所述第二齿轮的第二传动元件,其中所述第一齿轮被固定套设于所述第一旋转轴,其中所述第二齿轮位于远离所述安装板的一端,所述第二齿轮的轴心固定嵌设有垂直贯穿所述移动板至所述第一安装面,并能够自由转动的第二旋转轴;和
一悬臂,其中所述悬臂沿所述第二旋转轴的延伸方向固定连接所述第二旋转轴靠近所述第一安装面的一端。
在一种可能的实施方式中,所述固定板设置有至少两个第一传感器,至少两个所述第一传感器沿所述移动板的旋转路径间隔设置,以在所述移动板转动至预定位置时对应感应所述移动板。
在一种可能的实施方式中,所述第一传动元件被实施为传动带,所述传动带的内圈设置有齿条,以通过所述齿条分别与所述第一同步带轮和所述第二同步带轮啮合连接。
在一种可能的实施方式中,所述第二传动元件被实施为若干个啮合连接的第三齿轮,若干个所述第三齿轮于所述第一齿轮和所述第二齿轮之间依次排列,并分别与所述第一齿轮和所述第二齿轮啮合连接。
在一种可能的实施方式中,所述第二同步带轮与所述第二齿轮的转速比为0.3~0.7:1,以在所述移动板被翻转预定角度时所述悬臂能够同步自转一定的角度而能够正对并贴紧所述移动板的翻转轨迹所形成的虚拟形状。
在一种可能的实施方式中,所述固定板的正面或反面沿竖直方向设置有直线导轨;
所述翻转机构还包括升降底座和升降元件,其中所述升降元件被固定设置在所述升降底座上,所述升降元件的升降端固定连接所述固定板,且所述升降底座设置有与所述直线导轨相配合的滑块,以使所述升降元件的升降端带动所述固定板能够定向上下移动。
进一步地,所述翻转机构还包括支撑座座和水平驱动元件,其中所述支撑座被设置于所述升降底座的底部,其中所述水平驱动元件包括被水平固定设置于所述支撑座的伺服电机以及被水平设置于所述支撑座内的丝杆和导向杆,所述丝杆转动连接所述伺服电机的转动端;
所述升降底座设置有与所述丝杆相配合的丝杆座。
进一步地,所述支撑座于所述丝杆的传动方向依次设置有至少三个第二传感器,其中位于两端的所述第二传感器被实施为边界限位传感器,而位于中间的所述第二传感器被实施为到位传感器;
所述升降底座设置有感应元件,以在移动时被所述第二传感器感应。
第二方面,本申请还提供了一种自动扣包布机,用于自动扣包布,其中所述自动扣包布机包括上述大角度翻转机构,其中所述悬臂远离所述移动板的一端设置有包布固定装置和包布感应装置,其中所述包布固定装置包括定位元件和夹紧元件,以分别定位和固定所述包布,所述定位元件被设置在所述悬臂预定的位置,以在所述悬臂被驱动而翻转到位时所述定位元件能够正对并贴紧被包绕产品的预定的位置,以便于所述包布被扣接在被包绕产品上。
在一种可能的实施方式中,所述定位元件被实施为定位套,其中所述夹紧元件包括被可移动地设置于所述悬臂的压紧板和锁紧块,其中所述压紧板和所述锁紧块相配合,以在通过所述压紧板压紧所述包布后,能够通过所述锁紧块锁紧所述包布。
本发明的这些和其它目的、特点和优势,通过下述的详细说明,得以充分体现。
附图说明
图1示出了本申请一较佳实施例大角度翻转机构的局部主视结构示意图。
图2示出了本申请一较佳实施例大角度翻转机构的局部后视结构示意图。
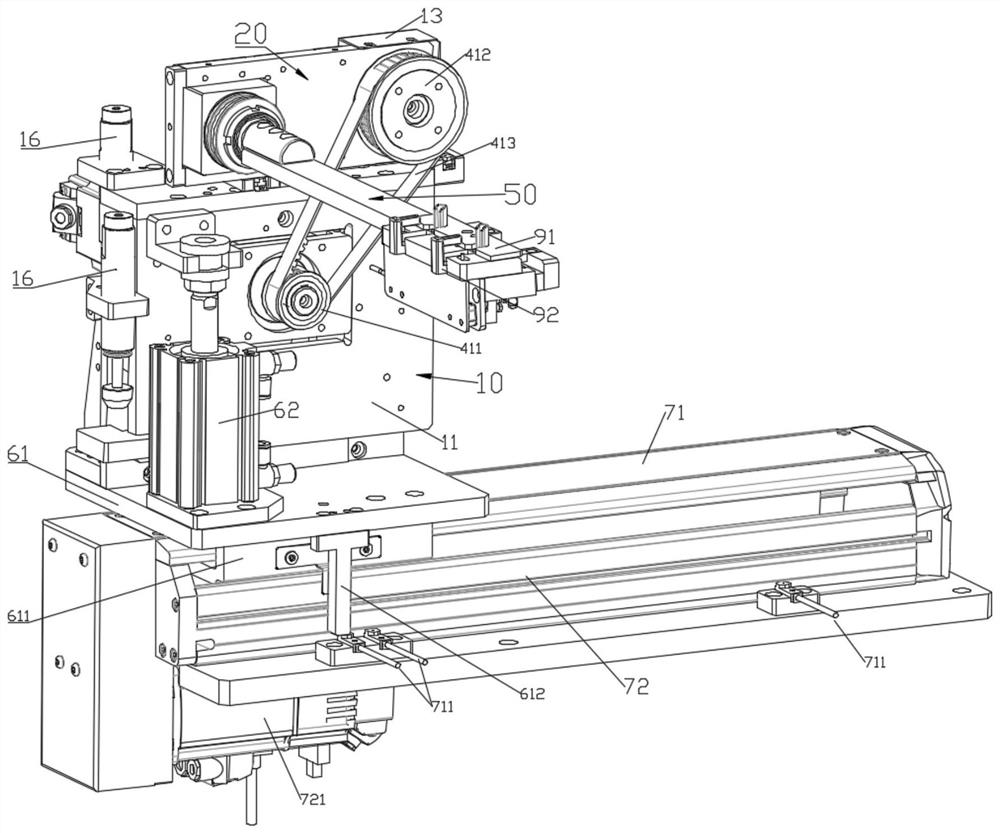
图3示出了本申请一较佳实施例大角度翻转机构的整体结构示意图。
具体实施方式
以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
本领域技术人员应理解的是,在说明书的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
结合说明书附图1至图3,依本发明一较佳实施例的一种大角度翻转机构将在以下被详细地阐述,其中所述大角度翻转机构包括固定板10、移动板20、转动元件30、传动装置和悬臂50。
所述固定板10具有相对的正面11和反面12,其中所述固定板10于其顶部靠近长度方向的右端同向设置有安装板13。
所述移动板20被可转动地设置于所述安装板13,其中所述移动板20固定垂直嵌设有第一旋转轴23,而所述第一旋转轴23被可转动地垂直嵌设于所述安装板13。当所述第一旋转轴23旋转时,由于所述第一旋转轴23固定连接所述移动板20,而所述第一旋转轴23在所述安装板13内能够自由转动,使得所述移动板20的右端能够沿所述固定板10所在的平面以所述第一旋转轴23为旋转轴心进行转动。显然,本领域技术人员能够理解的是,所述移动板20与所述固定板10之间具有足够的竖向间隙或横向间隙,才能满足所述移动板20在所述固定板10所在的平面能够自由旋转这一要求。为使该翻转机构的结构更加紧凑,同时能够具有较高的传动能力,本申请在所述移动板20和所述固定板10之间设置有足够的竖向间隙,从而使得下述第一同步带轮411能够靠近所述转动元件30。另外,为便于介绍,所述移动板20具有与所述正面11和所述反面12相对应的第一安装面21和第二安装面22。
所述转动元件30被固定安装于所述固定板10的反面12,其中所述转动元件30具有一转动端,所述转动端朝所述正面11延伸而贯穿所述固定板10,形成一动力部31。所述动力部31作为动力源而输出动力。
所述传动装置包括翻转传动机构41和自转传动机构42,其中所述翻转传动机构41包括被固定套设于所述动力部31的第一同步带轮411、被固定套设于所述第一旋转轴23的第二同步带轮412和传动所述第一同步带轮411和所述第二同步带轮412的第一传动元件413,其中所述第二同步带轮412被设置靠近所述第一安装面21。所述动力部31在所述第一同步带轮411和所述第一传动元件413的传动作用下带动所述第二同步带轮412同步转动。所述自转传动机构42包括被设置靠近所述第二安装面22的第一齿轮421、第二齿轮422和传动所述第一齿轮421和所述第二齿轮422的第二传动元件423,其中所述第一齿轮421被固定套设于所述第一旋转轴23,其中优选地,所述第一齿轮421被设置于所述移动板20和所述安装板13之间,以使整体结构更加紧凑以及稳定;其中所述第二齿轮422靠近所述移动板20的左端。所述第二齿轮422的轴心固定嵌设有垂直贯穿所述移动板20至所述第一安装面21,并能够自由转动的第二旋转轴424。
所述悬臂50沿所述第二旋转轴424的延伸方向固定连接所述第二旋转轴424靠近所述第一安装面21的一端。
简单来说,所述转动元件30通过所述动力部31带动所述第一同步带轮411旋转,进而通过所述第一传动元件413带动所述第二同步带轮412旋转,从而带动所述第一旋转轴23旋转。在所述第一旋转轴23被带动旋转时,由于所述移动板20在右端与所述第一旋转轴23固定套接,所述移动板20的左端就会以所述第一旋转轴23为旋转轴心进行转动,也就使得所述悬臂50以所述第一旋转轴23为旋转轴心进行大角度翻转。另外,由于所述第一齿轮421与所述第一旋转轴23固定套接,在所述第一旋转轴23旋转的同时,所述第一齿轮421就会被带动同步旋转,进而通过所述第二传动元件423带动所述第二齿轮422旋转,由于所述第二旋转轴424被固定嵌设在所述第二齿轮422的轴心,在所述第二齿轮422旋转时,所述第二旋转轴424被带动同步旋转,使得被固定连接在所述第二旋转轴424端部的所述悬臂50在随所述移动板20的左端进行大角度翻转时还能够自转。从而通过实施一个动力源(转动元件30)加若干个机械传动装置(翻转传动机构41和自转传动机构42)达到大角度翻转+自转的效果。这种复杂的控制方式,相对于常规工业机器人,控制方式以及传动结构更加简单,易于维护和维修,整体成本更低,同时整体结构更加紧凑,适用范围更加广泛。
需要说明的是,该大角度翻转机构在具体应用中,比如利用大角度翻转和自转的特性包绕片材或布匹时,常常需要包绕一定的范围。因此,所述固定板10设置有至少两个第一传感器14。至少两个所述第一传感器14沿所述移动板20的旋转路径间隔设置,以在所述移动板20转动至预定位置时对应感应所述移动板20。具体的,当所述第一传感器14被设置为两个时,这两个第一传感器14分别设置在所述移动板20旋转轨迹的起始端和终点端,使所述移动板20在两个第一传感器14之间循环旋转包绕。对于需要灵活调整所述移动板20的翻转范围的情况,所述第一传感器14可以设置为三个或三个以上,其中位于两端的第一传感器14分别作为起始和终点的边界,而位于起始和终点之间的第一传感器14作为到位传感器使用,所述移动板20可以在任意两个所述第一传感器14之间进行翻转,从而形成不同的包绕范围。所述第一传感器14被优选设置为接近传感器,以灵活感应所述移动板20的位置状态。
在一种可能的实施方式中,所述第一传动元件413被实施为传动带,以应对复杂的传动环境,比如在所述第一同步带轮411和所述第二同步带轮412之间难以安装传动齿轮的情况,同时所述传动带的内圈设置有齿条414,以通过所述齿条414分别与所述第一同步带轮411和所述第二同步带轮412啮合连接,从而使所述第一传动元件413具有较高的传动精度和传动效率。
在一种可能的实施方式中,所述第二传动元件423被实施为若干个啮合连接的第三齿轮。若干个所述第三齿轮于所述第一齿轮421和所述第二齿轮422之间依次排列,并分别与所述第一齿轮421和所述第二齿轮422啮合连接,以实现精准的同步传动。
在一种可能的实施方式中,所述第二同步带轮412与所述第二齿轮422的转速比为0.3~0.7:1,以在所述移动板20被翻转预定角度时所述悬臂50能够同步自转一定的角度而能够正对并贴紧所述移动板20的翻转轨迹所形成的虚拟形状。即所述移动板20的翻转速度与所述曲臂50的自转速度比为0.3~0.7:1,从而在所述移动板20进行大角度公转翻转时,所述曲臂50同步进行自转,且自转速度相对于公转速度更快。具体的,在包绕片材或布匹时,首先将片材或布匹的其中一端固定在所述曲臂50前端预定的位置,比如所述曲臂50前端的正上方,当包绕半圈时,所述移动板20转动半圈,从而旋转180°从产品的顶端移动至产品的底端,而所述曲臂50自转一整圈,即360°,使固定片材或布匹的位置在包绕完成时仍然位于所述曲臂50前端的正上方,可以直接将片材或布匹扣接在产品底部的螺柱上,满足工艺要求。显然,本技术领域技术人员能够理解的是,根据实际的包绕需要,该转速比可以对应设置为0.4:1或者0.6:1,在此不再详细限定。
另外,随着同一卷材包绕尺寸的逐渐变大或者包绕不同外径的卷材,该翻转机构的翻转范围因受限制而可能无法适用,作为本申请一较佳实施例,所述固定板10的正面11或反面12沿竖直方向设置有直线导轨15;
所述翻转机构还包括升降底座61和升降元件62,其中所述升降元件62被固定设置在所述升降底座61上,所述升降元件62的升降端固定连接所述固定板10,且所述升降底座61设置有与所述直线导轨15相配合的滑块63,以使所述升降元件62的升降端带动所述固定板10能够定向上下移动。配合所述翻转机构的大角度翻转,所述升降元件62同时驱动所述固定板10上下移动,能够进一步提高所述翻转机构在竖直方向的翻转范围。另外,为了避位所述转动元件30,所述直线导轨15被设置在所述固定板10的反面12,而所述升降元件62被设置靠近所述固定板10的正面11,同时所述升降底座61被设置成倒立的T字型,且所述升降底座61设置有容纳所述转动元件30的开口。
值得一提的是,为了减缓所述移动板20在转动过程中对所述固定板10的冲击力,以及减缓所述固定板10在升降过程中对所述升降底座61的冲击力,所述固定板10以及所述升降底座61分别安装有缓冲器16。
作为本申请一较佳实施例,结合图3,所述翻转机构还包括支撑座71和水平驱动元件72,其中所述支撑座71被设置于所述升降底座61的底部,其中所述水平驱动元件72包括被水平固定设置于所述支撑座71的伺服电机721以及被水平设置于所述支撑座71内的丝杆和导向杆。所述丝杆转动连接所述伺服电机721的转动端;
所述升降底座61设置有与所述丝杆相配合的丝杆座611。
通过所述伺服电机721、所述丝杆和所述导向杆利用丝杆传动的方式控制所述升降底座61在水平方向移动,从而在提高所述翻转机构在竖直方向的翻转范围的同时,能够在水平方向提高所述翻转机构的翻转范围,从而形成上下方向以及左右方向的位置补偿。
值得一提的是,所述支撑座71于所述丝杆的传动方向依次设置有至少三个第二传感器711,其中位于两端的所述第二传感器711被实施为边界限位传感器,而位于中间的所述第二传感器711被实施为到位传感器;
所述升降底座61设置有感应元件612,以在移动时被所述第二传感器感应711。
通过所述边界限位传感器限位所述升降底座61在水平方向的极限移动位置,从而保护该翻转机构,同时保护周边的其它设备以及工作人员。另外,通过所述到位传感器感应所述感应元件612,实现所述升降底座61在水平方向移动的自动定位,从而使所述翻转机构在左右方向自动进行位置补偿,便于进行更精准的控制。
第二方面,本申请还提供了一种自动扣包布机,用于自动扣包布,其中所述自动扣包布机包括上述大角度翻转机构,其中所述悬臂50远离所述移动板20的一端设置有包布固定装置和包布感应装置,其中所述包布固定装置包括定位元件81和夹紧元件,以分别定位和固定所述包布。所述定位元件81被设置在所述悬臂50预定的位置,以在所述悬臂50被驱动而翻转到位时所述定位元件81能够正对并贴紧被包绕产品的预定的位置(一般是设置在产品表面的螺柱处),以便于所述包布被扣接在被包绕产品上。也就是说所述移动板20的公转和所述悬臂50的自转满足预定的转速比关系。在所述移动板20进行大角度翻转时,通过翻转预定的角度完成对所述包布的包绕,同时通过所述悬臂50的自转,使所述包布到位后能够使所述定位元件81正对并贴紧产品,从而将所述包布直接扣接在产品上。在此过程中,所述定位元件81的朝向需要是固定正对并贴紧产品,才能满足工艺需求。
在一种可能的实施方式中,所述定位元件81被实施为定位套,其中所述夹紧元件包括被可移动地设置于所述悬臂50的压紧板91和锁紧块92,其中所述压紧板91和所述锁紧块92相配合,以在通过所述压紧板91压紧所述包布后,能够通过所述锁紧块92锁紧所述包布。
具体的,所述压紧块91和所述锁紧块92均被气缸驱动而实现压紧和锁紧功能。以所述曲臂50的前端作为固定所述包布的载体51,所述定位套通过螺柱被竖向固定在所述载体51的中间,同时所述载体51在靠近右侧的中间位置设置有竖向通道,而在左侧的两端设置有缺口。所述压紧板91和驱动所述压紧板91的气缸被设置在所述竖向通道,能够在所述包布到位后压紧所述包布。所述锁紧块92与驱动所述锁紧块92的气缸被设置在所述载体51的左侧,且所述锁紧块92正对所述缺口。所述锁紧块92通过左右移动插入所述缺口内贴紧所述压紧板91,从而锁紧被压紧的所述包布。
需要说明的是,本发明中用语“第一、第二以及第三”仅用于描述目的,不表示任何顺序,不能理解为指示或者暗示相对重要性,可将这些用语解释为名称。
本领域的技术人员应理解,上述描述所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
- 一种大角度翻转机构及自动扣包布机
- 一种大角度翻转机构及自动扣包布机