球形轮胎单机驱动系统
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及汽车领域,尤其是未来的新型汽车,具体是一种球形轮胎的单机驱动系统。
背景技术
汽车技术的发展已经有上百年历史,由于技术的进步,尤其新能源技术的快速发展,未来汽车已经呼之欲出。其中一个引人注目的概念就是全向型移动汽车,并且出现了若干可行的技术方案,包括全向轮、麦克纳姆轮,以及近年来提出的球形轮胎概念设计。全向轮和麦克纳姆轮已经有实际的应用,但是由于它们的结构特性,行驶时震动比较大,所以一般应用于工业场景和特种车辆,无法应用于乘用车。为此,球形轮胎的概念设计就引起业界的极大关注。球形轮胎是未来汽车全向行驶的一个重要的技术实施方法,但是球形轮胎的特殊形状也给它的传动机构,以及驱动和控制带来了复杂性,目前已知的技术方案有磁悬浮支撑、电磁驱动、多机驱动、球内驱动等。这些方案要么技术难度太高、要么结构过于复杂、要么耗能太大,从而导致成本太高使人望而却步,也因此迄今未见真正的球形轮胎实车面市。
发明内容
本发明提供了一种球形轮胎的单机驱动系统,它包括四个球形轮胎,每个球形轮胎配置且仅需配置一台驱动电机及其连接的驱动盘。
驱动盘具有球面状接触面并与球形轮胎紧密接触,通过摩擦力带动球形轮胎转动,同时也可以通过施加一定方向和速度的摩擦力进行制动。
驱动电机的转轴与车辆的前进方向分别为45°角(车辆前部两个驱动电机)、135°角(车辆后部两个驱动电机)的对称布局。
通过分别控制四个球形轮胎的正反转和旋转速度,可以驱动车辆全向行驶。
驱动电机与驱动盘的组合体设置有离合机构,以便球形轮胎在必要时灵活转动。
整个驱动系统由以微处理器为核心的控制器控制,可以通过软件控制四个球形轮胎运行在最佳状态。
附图说明
图1是球形轮胎单机驱动结构的示意图(俯视图);
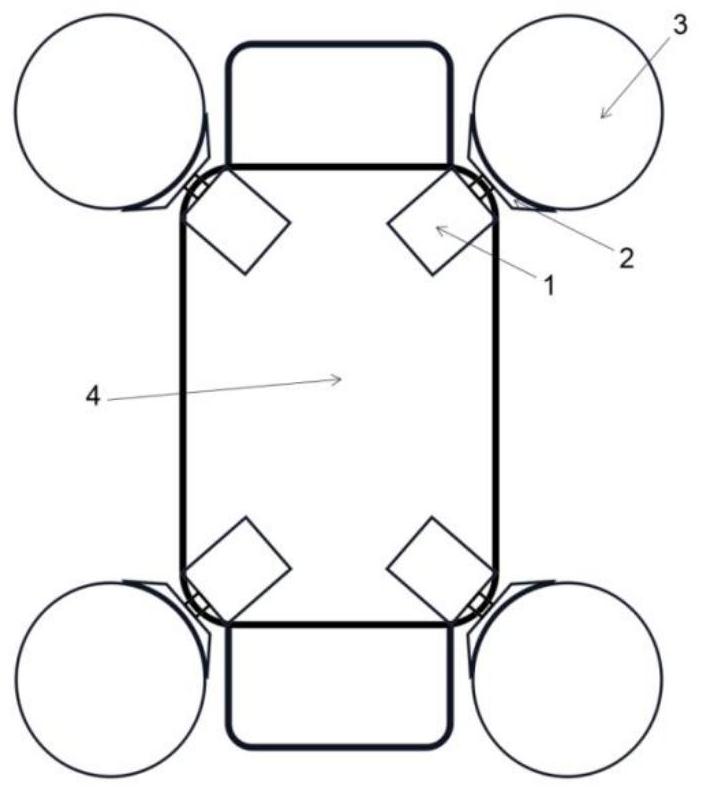
图2是四组球形轮胎单机驱动结构在车架上的布局(俯视图);
图3是四个球形轮胎的不同转动方向与车架移动方向的关系(左面为向前移动、右面为向右移动);
图4是四个球形轮胎的不同转动方向与车架移动方向的关系(左面为向左前方移动、右面为原地旋转)。
上述图中的编号分别表示:
1.驱动电机;
2.驱动盘;
3.球形轮胎;
4.车架。
具体实施方式
本发明已经在模型车辆上实现了车辆的全向移动,同样本方案也可以直接应用到大型实体车辆上。这里结合四张附图作一些具体的说明。
图1是本发明最基本的创新设计,即由一台驱动电机通过具有球状接触面的驱动盘与球形轮胎紧密接触,带动球形轮胎的旋转。
图2是四个球形轮胎和驱动电机在车辆上的基本布置,其要点在于驱动电机的转轴与车辆的前进方向分别为45°角(车辆前部两个驱动电机)、135°角(车辆后部两个驱动电机)的对称布局。
球形轮胎单机驱动系统是通过分别控制四个球形轮胎驱动电机的正反转和旋转速度来实现车辆的全向行驶,图3和图4是这些过程的示意图。图中球形轮胎上的虚线箭头表示驱动电机和球形轮胎的旋转方向,车辆上的虚线箭头表示车辆的移动和行驶方向。
图3的左面是四个球形轮胎在驱动电机的分别带动下做出的前向移动状态,因为四个电机转轴分别与车辆的前进方向存在夹角,所以车辆的移动方向是由四个球形轮胎转动时形成的合力决定的。
图3的右面是四个球形轮胎在驱动电机的分别带动下做出的往右横向移动状态,同样道理,车辆的移动方向也是由四个球形轮胎转动时形成的合力决定的。
图4的左面是四个球形轮胎在驱动电机的分别带动下做出的往左斜向移动状态,同样道理,车辆的移动方向也是由四个球形轮胎转动时形成的合力决定的。
图4的右面是四个球形轮胎在驱动电机的分别带动下做出的向右旋转移动状态,同样道理,车辆的移动方向也是由四个球形轮胎转动时形成的合力决定的。
只要分别改变四个驱动电机的旋转方向和速度,在各个不同的组合下,车辆就能实现全向移动。
另外,本发明在实施过程中使用了上下双环加滚珠支撑的方法来承托球形轮胎,这已经是比较成熟的技术。同样,驱动盘的离合机构即可以是液压方式,也可以是电磁方式,都是比较成熟的技术,不在本发明的范围内,故不再赘述。
- 球形轮胎单机驱动系统
- 球形轮胎驱动系统、方法及具有该系统的球形轮胎汽车