一种基于高光像素检测的视觉里程计位姿优化方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及机器人视觉定位领域,尤其是涉及一种基于高光像素检测的视觉里程计位姿优化方法。
背景技术
在金属等光滑物体表面常常发生镜面反射,导致相机捕获到的图像存在高光像素。而高光像素位置会随相机视角和光源位置移动而改变,导致视觉定位中相邻图像匹配错误,从而导致定位精度下降。
发明内容
为解决现有技术的不足,本发明在传统视觉里程计位姿求解中引入高光权重矩阵,实现提高视觉里程计定位精度的目的,本发明采用如下的技术方案:
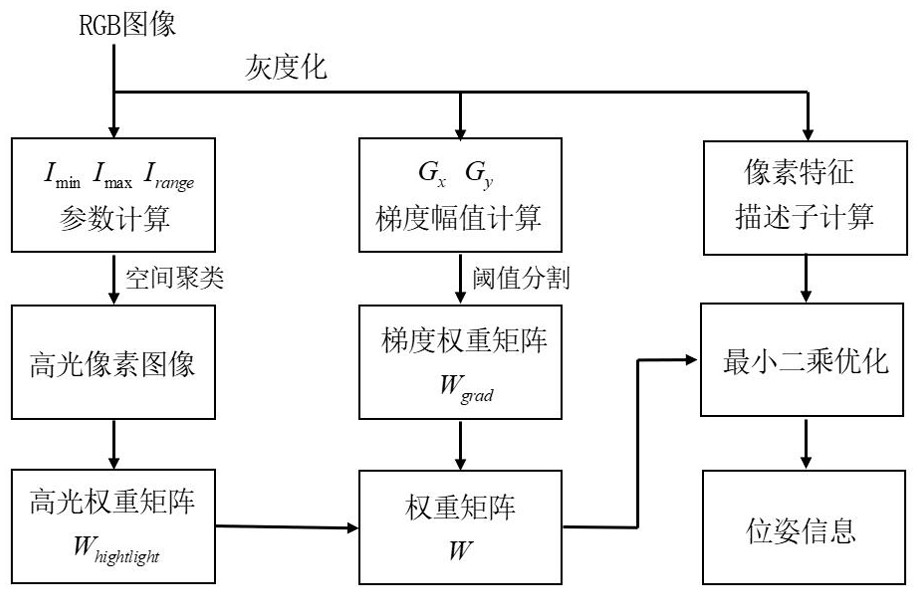
一种基于高光像素检测的视觉里程计位姿优化方法,包括如下步骤:
S1,按照固定帧数实时获取环境彩色图像信息;
S2,计算彩色图像中高光像素图片;
S3,通过高光像素图片,计算各像素高光权重矩阵
S4,计算各像素梯度权重矩阵
S5,计算最终权重矩阵
S6,计算各像素点描述子;
S7,建立最小二乘优化方程,代入权重矩阵和像素点描述子,进行非线性优化求解位姿信息。
进一步地,所述S2中,将所有彩色图像像素对应的色度值,引入到最小色度-最大色度二维空间进行聚类,通过聚类得到的
进一步地,所述
其中,
进一步地,所述高光像素成分
进一步地,所述S3中,设置高光阈值
进一步地,所述S4包括如下步骤:
S41,将彩色图像灰度化,对图像进行高斯模糊处理,计算像素点在x和y方向上的梯度幅值:
其中,
S42,设置梯度阈值
进一步地,所述S6中,通过表示当前帧图像中像素对应的特征描述子计算函数
进一步地,所述S7中,最小二乘优化方程:
其中,
进一步地,所述
进一步地,所述
本发明的优势和有益效果在于:
本发明在传统视觉里程计位姿求解中引入高光权重矩阵,避免了图像存在高光像素,且位置会随相机视角和光源位置移动而改变,导致视觉定位中相邻图像匹配错误,有效提高视觉里程计定位精度。
附图说明
图1是本发明的方法流程图。
图2a是本发明中聚类后的最小色度-最大色度二维空间示意图。
图2b是本发明中聚类并计算中位数后的最小色度-最大色度二维空间示意图。
图3a是本发明中的原始图。
图3b是本发明中检测到高光像素的示意图。
图4是本发明的定位精度对比示意图。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
如图1所示,本发明的具体实施如下:
S1:相机搭载在移动平台上,固定其位置与视角,按照固定帧数实时获取环境彩色图像信息;
S2:计算彩色图像中高光像素图片:计算彩色图像最小强度
通过
其中,
将最小色度值
如图3a所示为原始图像,如图3b所示为检测到的高光像素示意图。图中白色像素为图像高光区域。
S3:计算各像素高光权重矩阵
S4:计算各像素梯度权重矩阵
上式中
然后设置梯度阈值
S5:计算最终权重矩阵
S6:计算各像素点描述子;
S7:建立最小二乘优化方程,代入权重矩阵
上式中
如图4所示为视觉里程计引入高光像素检测与未引入高光像素检测的定位精度对比示意图。图中虚线为真实轨迹,深色直线为引入高光像素权重矩阵的视觉里程计定位轨迹,浅色直线为引入高光像素权重矩阵的视觉里程计定位轨迹。由实验结果可知,引入高光像素检测的视觉里程计能够提供更高的定位精度。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
- 一种基于高光像素检测的视觉里程计位姿优化方法
- 一种基于高光像素检测的视觉里程计位姿优化方法