一种可适配左右臂的上肢外骨骼装置及其转换方法
文献发布时间:2023-06-19 11:49:09
【技术领域】
本发明涉及外骨骼机器人技术领域,特别涉及一种可适配左右臂的上肢外骨骼装置及其转换方法。
【背景技术】
近年来,机械电子、自动化以及人工智能等技术的飞速发展,为康复外骨骼的研究提供了关键的基础技术支持,使得康复外骨骼的研究与发展进入了一个崭新的阶段。
但是,现有的外骨骼装置大多数制造成本较高,设备结构复杂,且质量较重、不具有穿戴性,而且绝大多数只能适用于单侧患肢的康复训练,无法同时配适左右手臂的康复训练;能够配适左右手臂的外骨骼装置,又不具备可穿戴性,且装置两侧的左右手臂上缺少机械限位,患者在康复训练过程没有安全保障,可能对患者造成二次伤害。
为了解决上述问题,本发明提供了一种可适配左右臂的上肢外骨骼装置及其转换方法。
【发明内容】
为了解决现有外骨骼装置制造成本高,设备结构复杂,装置质量大、不具有穿戴性,以及不能同时实现左右手臂的配适和机械限位等缺陷,本发明提供了一种可适配左右臂的上肢外骨骼装置及其转换方法。
为了解决上述问题,本发明提供以下技术方案:
一种可适配左右臂的上肢外骨骼装置,其特征在于:包括有用于带动手臂进行外展、内收运动的第一电机,所述第一电机的输出端连接有第一安装架,所述第一安装架上设有带动大臂进行屈曲、伸展运动的第二电机,所述第二电机的输出端连接第二安装架,所述第二安装架上设有贴合手臂、用于穿戴的上臂固定件,所述第二安装架上还设有用于带动小臂进行屈曲、伸展运动的第四电机,所述第二安装架的下端铰接有第一支撑管,所述第四电机通过传送机构带动所述第一支撑管绕铰接点转动,所述第一支撑管上设有贴合手臂、用于穿戴的小臂固定件,所述第一支撑管的下端设有手柄。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第一安装架包括有第一安装板和第二安装板,所述第一安装板和所述第二安装板垂直,所述第一电机外包裹有电机固定件,所述第一电机安装固定在所述电机固定件内,所述第一电机的输出轴连接有第一输出法兰,所述第一输出法兰与所述第一安装板固定连接,所述第二电机安装在所述第二安装板上,所述第二电机的输出轴上连接有用于带动所述第二安装架运动的第二输出法兰,所述第二输出法兰与所述第四电机固定连接。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第一安装板插接在所述第二安装板一端且由角码固定连接,所述第一安装板包括有肩关节第一安装片和肩关节第二安装片,所述肩关节第一安装片和所述肩关节第二安装片之间由螺杆连接固定,所述第二安装板包括有肩关节第三安装片和肩关节第四安装片,所述肩关节第三安装片和所述肩关节第四安装片之间同样由螺杆连接固定,所述肩关节第一安装片和所述肩关节第二安装片连接所述第一输出法兰的一端为半圆形,所述肩关节第三安装片和所述肩关节第四安装片安装所述第二电机的一端为环形,所述第一输出法兰连接固定在所述肩关节第一安装片上,所述第二电机安装在所述肩关节第三安装片和所述肩关节第四安装片之间。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第一电机顶端设有肩关节第一限位片,所述肩关节第一安装片上对应设有第一限位挡板,所述第二输出法兰的一侧设有凸出的肩关节第二限位片,所述肩关节第四安装片上对应设有第二限位挡板,所述第一电机下端且位于所述肩关节第一安装片下方设有用于限制所述上肢外骨骼装置肩关节旋转方向的旋转方向限位板,所述旋转方向限位板安装固定在所述第一电机底端。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述肩关节第一限位片包括有安装底座以及能够向外转动的限位挡片,所述肩关节第一安装片在所述第一限位挡板的安装孔位上设有用于左右手臂适配转换时、调节限位角度的调节槽,所述第一限位挡板可滑动地安装在所述调节槽内,所述肩关节第四安装片上对应所述第二限位挡板的位置上设有滑槽,所述第二限位挡板安装在所述滑槽的其中一侧且由螺钉固定在所述滑槽两侧对应的螺孔内,所述第二限位挡板上对称设有两个限位块。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第二安装架上还安装有用于冗余控制肘关节运动的第三电机,所述第二电机、第三电机和第四电机位于同一轴线上,所述第二安装架的上端设有用于传动的第一同步轮,所述第二安装架的下端对应设有第二同步轮,所述第一同步轮和所述第二同步轮上环绕有同步带,所述第三电机的输出端设有第三输出法兰,所述第三输出法兰和所述第四电机分别连接在所述第一同步轮的两侧;在所述第一同步轮和所述第二同步轮之间设有用于调节所述同步带松紧的张紧轮机构,所述张紧轮机构包括有两个紧贴所述同步带的滚轮,所述滚轮背面设有推块,所述推块上设有用于调节所述张紧轮机构压缩距离的旋转螺丝。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第二安装架包括有上臂第三安装板、上臂第四安装板和上臂第五安装板,所述上臂第三安装板为单独的一块安装片、所述上臂第四安装板和所述上臂第五安装板均由上下两块安装片组成,在所述上臂第四安装板和所述上臂第五安装板之间且位于上下两块安装片间隙处设有用于连接安装片的固定块,所述固定块上设有间距相同的、用于调节上臂机械长度的上臂调节安装孔,所述第三电机安装在所述上臂第三安装板外侧,所述第四电机安装在所述上臂第四安装板和所述上臂第五安装板之间,所述第一同步轮位于所述上臂第三安装板和所述上臂第四安装板之间,所述第二同步轮位于所述上臂第四安装板外侧。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第一支撑管上端设有小臂连接件,所述第一支撑管末端嵌套有用于调节小臂机械长度的第二支撑管,所述小臂连接件包括有两边带有轴承的、用于带动所述第一支撑管运动的旋转块,所述旋转块安装在所述上臂第四安装板和所述上臂第五安装板之间且位于其末端,所述旋转块凸起的一面与所述第二同步轮固定连接,所述旋转块上设有通孔,所述通孔内设有用于连接固定所述第一支撑管的插梢,所述插梢上端可转动的设有肘关节限位片,在所述上臂第四安装板和所述上臂第五安装板之间对应设有肘关节限位柱,所述肘关节限位片包括有旋转底座以及能够在旋转底座上转动的肘关节挡片;所述第一支撑管上设有间距相同的、用于伸缩调节小臂机械长度的小臂调节安装孔,所述第二支撑管末端设有用于安装所述手柄的安装头,所述手柄内设置有多方位的、用于检测手掌用力方向的力传感器。
如上所述可适配左右臂的上肢外骨骼装置,其特征在于:所述第一安装架和所述第二安装架的材质均为碳纤维板,所述第一支撑管和所述第二支撑管的材质为铝合金。
一种采用上述外骨骼装置的左右臂转换方法,其特征在于:将所述可适配左右臂的上肢外骨骼装置从配适右臂的状态转换为配适左臂的状态,具体步骤如下:
步骤一:将所述限位挡片绕着所述安装底座上两者的铰接点旋转打开,所述第一电机不动,将所述上肢外骨骼装置的机械臂整体绕所述第一电机的输出轴旋转180°后,将所述限位挡片绕着所述安装底座上两者的铰接点旋转闭合;
步骤二:再将所述第一限位挡板滑到所述调节槽的另一端后,肩部第一关节调节完毕;
步骤三:将所述第二限位挡板从所述滑槽的一侧调节到另一侧且由螺钉固定;
步骤四:将所述上肢外骨骼装置的机械臂绕所述第二电机的输出轴旋转180°,肩部第二关节调节完毕;
步骤五:将所述上肢外骨骼装置的上臂部分和小臂部分调节至垂直的状态,所述肘关节限位片露出;
步骤六:将所述旋转底座旋转180°后,再将所述肘关节挡片绕着所述旋转底座上两者的铰接点旋转;
步骤七:将所述上肢外骨骼装置的小臂部分绕肘关节处的铰接点旋转180°后,再将所述肘关节挡片绕着所述旋转底座上两者的铰接点旋转至原位,肘关节调节完毕;
步骤八:将所有驱动电机复位置零;
将所述可适配左右臂的上肢外骨骼装置从配适左臂的状态转换为配适右臂的状态,其具体过程与上述步骤相同;步骤一和步骤二用于调节肩部第一关节,步骤三和步骤四用于调节肩部第二关节,步骤五、步骤六和步骤七用于调节肘关节,肩部第一关节、肩部第二关节和肘关节的调节不分先后。
与现有技术相比,本发明有以下优点:
1、本发明可适配左右臂的上肢外骨骼装置,上臂运动机构采用双电机驱动的冗余结构来控制肘关节的运动,双电机的冗余控制系统能够实现快速和准确的动态响应,增加外骨骼装置的稳定性,同时,双电机输出可以使得肘关节保持更大的持续力矩,因此,本发明不仅可以应用于康复训练,还可以在日常生活辅助等方面应用推广。
2、本发明可适配左右臂的上肢外骨骼装置,该装置的机械结构是以肩部关节的中心线为轴的对称设计,并且在关节的机械限位上进行了可转动的特别设计,能够实现左右手臂的适配转换,且转换后依然具有单侧运动时的限位角度,能够对左右手臂进行康复训练,大大降低了外骨骼装置的设计成本和制造成本。
3、本发明可适配左右臂的上肢外骨骼装置,采用碳纤维和铝合金材质,进一步减轻了该装置的整体重量,实现了外骨骼装置轻量化,而且设有上臂固定件和小臂固定件,还设有间距相同的调节安装孔,能够调节上臂运动机构和小臂运动机构的长度,适用于不同使用者的上肢尺寸,使其具有良好的可穿戴性。
4、本发明可适配左右臂的上肢外骨骼装置,所用的驱动电机均为一体式轻量化电机,使得该装置不需要额外装配减速器和编码器,从而使整体结构紧凑、轻便,降低了控制系统复杂性。
5、本发明可适配左右臂的上肢外骨骼装置,手柄内设有多方位的、用于检测手掌用力方向的力传感器,能够实现人机交互功能;驱动电机接收到传感信号后迅速进行反馈调节,从而实现对力矩的精准控制,通过阻抗控制算法,将外骨骼装置与患者的关节阻抗进行匹配,能够提升该装置的柔顺能力。
6、本发明可适配左右臂的上肢外骨骼装置,肘关节的驱动电机安装在上臂运动机构的上端,通过同步带的传动方式来驱动肘关节,使该装置的质心靠近肩部,且所述第二电机、第三电机和第四电机位于同一轴线上,很大程度地减小了转动惯量,提升了该装置的灵活性。
【附图说明】
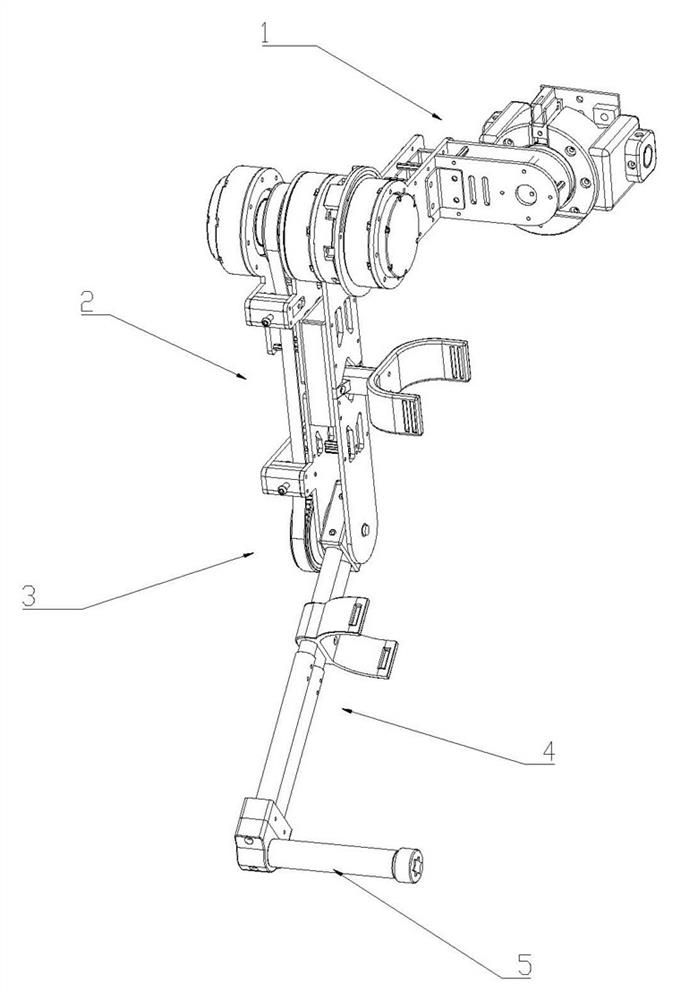
图1是所述上肢外骨骼装置整体图;
图2是所述上肢外骨骼装置的前视整体爆炸图;
图3是所述上肢外骨骼装置的后视整体爆炸图;
图4是所述肩部运动机构爆炸图;
图5是所述上臂运动机构爆炸图;
图6是所述肘关节旋转机构爆炸图;
图7是所述小臂运动机构和所述手柄爆炸图;
图8是所述上肢外骨骼装置的运动自由度示意图;
图9是所述上肢外骨骼装置的右臂状态立体图;
图10是所述上肢外骨骼装置的左臂状态立体图;
图11是所述上肢外骨骼装置的第一肩关节转换示意图;
图12是所述上肢外骨骼装置的第一肩关节转换完成示意图;
图13是所述上肢外骨骼装置的第二肩关节转换前视图;
图14是所述上肢外骨骼装置的第二肩关节转换后视图;
图15是所述上肢外骨骼装置的肘关节限位变换示意图;
图16是所述上肢外骨骼装置的小臂运动机构转换示意图。
图中:1为肩部运动机构;2为上臂运动机构;3为肘关节旋转机构;4为小臂运动机构;5为手柄;
101为第一安装架;102为第一电机;103为电机固定件;104为肩关节第一限位片;105为第一限位挡板;106为第一输出法兰;107为第二电机;108为第二输出法兰;109为肩关节第二限位片;110为第二限位挡板;111为第一安装板;1111为肩关节第一安装片;1112为肩关节第二安装片;112为第二安装板;1121为肩关节第三安装片;1122为肩关节第四安装片;113为安装底座;114为限位挡片;115为调节槽;116为限位块;117为滑槽;118为旋转方向限位板;
201为第二安装架;202为第三电机;203为第三输出法兰;204为第四电机;205为第一同步轮;206为第二同步轮;207为同步带;208为张紧轮机构;209为滚轮;210为推块;211为旋转螺丝;212为上臂固定件;213为上臂第三安装板;214为上臂第四安装板;215为上臂第五安装板;216为固定块;217为上臂调节安装孔;
301为小臂连接件;302为旋转块;303为通孔;304为插梢;305为肘关节限位片;306为肘关节限位柱;307为旋转底座;308为肘关节挡片;
401为第一支撑管;402为第二支撑管;403为小臂固定件;404为小臂调节安装孔;
501为安装头;502为力传感器。
【具体实施方式】
下面结合附图对本发明技术特征做进一步详细说明以便于所述领域技术人员能够理解。
一种可适配左右臂的上肢外骨骼装置,尤其是该装置的机械结构,如图1~图8所示,包括有肩部运动机构1,所述肩部运动机构1连接有上臂运动机构2,所述上臂运动机构2连接有肘关节旋转机构3,所述肘关节旋转机构3与小臂运动机构4相连接,所述小臂运动机构4末端设有手柄5;为了降低外骨骼装置机械结构的复杂程度,使得外骨骼装置轻量化且易于控制,如图8所示,本发明只考虑了肩关节的屈曲/伸展、肩关节的外展/内收和肘关节的屈曲/伸展共三个运动自由度。
具体的,所述肩部运动机构1包括有用于带动手臂进行外展、内收运动的第一电机102,所述第一电机102的输出端连接有第一安装架101,所述第一安装架101上设有带动大臂进行屈曲、伸展运动的第二电机107,所述第二电机107的输出端连接第二安装架201,所述第二安装架201上设有贴合手臂、用于穿戴的上臂固定件212,所述第二安装架201上还设有用于带动小臂进行屈曲、伸展运动的第四电机204,所述第二安装架201的下端铰接有第一支撑管401,所述第四电机204通过传送机构带动所述第一支撑管401绕铰接点转动,所述第一支撑管401上设有贴合手臂、用于穿戴的小臂固定件403,所述第一支撑管401的下端设有手柄5。
具体的,所述第一安装架101包括有第一安装板111和第二安装板112,所述第一安装板111和所述第二安装板112垂直,所述第一电机102外包裹有电机固定件103,所述第一电机102安装固定在所述电机固定件103内,所述第一电机102的输出轴连接有第一输出法兰106,所述第一输出法兰106与所述第一安装板111固定连接,所述第二电机107安装在所述第二安装板112上,所述第二电机107的输出轴上连接有用于带动所述第二安装架201运动的第二输出法兰108,所述第二输出法兰108与所述第四电机204固定连接。
此外,所述第一安装板111插接在所述第二安装板112一端且由合金角码固定连接,所述第一安装板111包括有肩关节第一安装片1111和肩关节第二安装片1112,所述肩关节第一安装片1111和所述肩关节第二安装片1112之间由螺杆连接固定,所述第二安装板112包括有肩关节第三安装片1121和肩关节第四安装片1122,所述肩关节第三安装片1121和所述肩关节第四安装片1122之间同样由螺杆连接固定,所述第一电机102下端且位于所述肩关节第一安装片1111下方设有用于限制所述上肢外骨骼装置肩关节旋转方向的旋转方向限位板118,所述肩关节第一安装片1111和所述肩关节第二安装片1112连接所述第一输出法兰106的一端为半圆形,而且所述肩关节第一安装片1111与所述旋转方向限位板118相切,使得所述旋转方向限位板118能够对第一肩关节的一个旋转方向进行限定且另一方向的旋转不受影响,所述肩关节第三安装片1121和所述肩关节第四安装片1122安装所述第二电机107的一端为环形,所述第一输出法兰106连接固定在所述肩关节第一安装片1111上,所述第二电机107安装在所述肩关节第三安装片1121和所述肩关节第四安装片1122之间。
具体的,所述第一电机102顶端设有肩关节第一限位片104,所述肩关节第一安装片1111上对应设有第一限位挡板105,所述第二输出法兰108的一侧设有凸出的肩关节第二限位片109,所述肩关节第四安装片1122上对应设有第二限位挡板110,所述旋转方向限位板118安装固定在所述第一电机102底端。
此外,所述肩关节第一限位片104包括有安装底座113以及能够向外转动的限位挡片114,所述肩关节第一安装片1111在所述第一限位挡板105的安装孔位上设有用于左右手臂适配转换时、调节限位角度的调节槽115,所述第一限位挡板105可滑动地安装在所述调节槽115内,所述肩关节第四安装片1122上对应所述第二限位挡板110的位置上设有滑槽117,所述第二限位挡板110安装在所述滑槽117的其中一侧且由螺钉固定在所述滑槽117两侧对应的螺孔内,所述第二限位挡板110上对称设有两个限位块116,通过所述限位块116挡住所述肩关节第二限位片109,对所述肩关节的屈曲/伸展运动范围进行机械限位。
具体的,所述第二安装架201上还安装有用于冗余控制肘关节运动的第三电机202,所述第二电机107、第三电机202和第四电机204位于同一轴线上,所述上臂运动机构2采用双电机驱动的冗余结构来控制所述肘关节旋转机构3的运动,双电机的冗余控制系统能够实现快速和准确的动态响应,增加外骨骼装置的稳定性,同时,双电机输出可以使得所述肘关节旋转机构3保持更大的持续力矩,因此,本发明不仅可以应用于患者的康复训练,还可以辅助患者的日常生活;所述第二安装架201的上端设有用于传动的第一同步轮205,所述第二安装架201的下端对应设有第二同步轮206,所述第一同步轮205和所述第二同步轮206上环绕有同步带207,所述第三电机202的输出端设有第三输出法兰203,所述第三输出法兰203和所述第四电机204分别连接在所述第一同步轮205的两侧;在所述第一同步轮205和所述第二同步轮206之间设有用于调节所述同步带207松紧的张紧轮机构208,所述张紧轮机构208设有两个,所述张紧轮机构208包括有两个紧贴所述同步带207的滚轮209,所述滚轮209背面设有推块210,所述推块210上设有用于调节所述张紧轮机构208压缩距离的旋转螺丝211。
此外,所述第一电机102、第二电机107、第三电机202和第四电机204均为集成了驱动器、编码器和减速器的一体式轻量化电机,使得该装置不需要额外装配减速器和编码器,从而使整体结构紧凑、轻便,降低了控制系统复杂性;所述第三电机202和所述第四电机204安装在所述上臂运动机构2的上端,通过所述同步带207的传动方式来驱动所述肘关节旋转机构3,使该装置的质心靠近肩部,且所述第二电机107、第三电机202和第四电机204位于同一轴线上,很大程度地减小了转动惯量,提升了该装置的灵活性。
具体的,所述第二安装架201包括有上臂第三安装板213、上臂第四安装板214和上臂第五安装板215,所述上臂第三安装板213为单独的一块安装片、所述上臂第四安装板214和所述上臂第五安装板215均由上下两块安装片组成,在所述上臂第四安装板214和所述上臂第五安装板215之间且位于上下两块安装片间隙处设有用于连接安装片的固定块216,所述固定块216上设有间距相同的、用于调节上臂机械长度的上臂调节安装孔217,调节所述上臂运动机构2的长度时需要与所述张紧轮机构208配合,所述上臂运动机构2伸长时需要先通过所述张紧轮机构208将所述同步带207调松,缩短时要在所述上臂运动机构2缩短后通过所述张紧轮机构208将所述同步带207调紧;所述第三电机202安装在所述上臂第三安装板213外侧,所述第四电机204安装在所述上臂第四安装板214和所述上臂第五安装板215之间,所述第一同步轮205位于所述上臂第三安装板213和所述上臂第四安装板214之间,所述第二同步轮206位于所述上臂第四安装板214外侧。
具体的,所述第一支撑管401上端设有小臂连接件301,所述第一支撑管401末端嵌套有用于调节小臂机械长度的第二支撑管402,所述小臂连接件301包括有两边带有轴承的、用于带动所述第一支撑管401运动的旋转块302,所述旋转块302安装在所述上臂第四安装板214和所述上臂第五安装板215之间且位于其末端,所述旋转块302凸起的一面与所述第二同步轮206固定连接,所述旋转块302上设有通孔303,所述通孔303内设有用于连接固定所述第一支撑管401的插梢304,所述插梢304上端可转动的设有肘关节限位片305,在所述上臂第四安装板214和所述上臂第五安装板215之间对应设有肘关节限位柱306,所述肘关节限位片305包括有旋转底座307以及能够在旋转底座307上转动的肘关节挡片308;所述第一支撑管401上设有间距相同的、用于伸缩调节小臂机械长度的小臂调节安装孔404,所述第二支撑管402末端设有用于安装所述手柄5的安装头501,所述手柄5内设置有多方位的、用于检测手掌用力方向的力传感器502,能够实现人机交互功能;驱动电机接收到传感信号后迅速进行反馈调节,从而实现对力矩的精准控制,通过阻抗控制算法,将外骨骼装置与患者的关节阻抗进行匹配,能够提升该装置的柔顺能力。
此外,所述第一安装架101和所述第二安装架201的材质均为碳纤维板,所述第一支撑管401和所述第二支撑管402的材质为铝合金,能够减轻该装置的整体重量,使得该装置具有良好的可穿戴性。
一种采用上述上肢外骨骼装置的左右臂转换方法,如图9~图16所示,图9为该上肢外骨骼装置配适右臂的状态,图10为该上肢外骨骼装置配适左臂的状态,将所述可适配左右臂的上肢外骨骼装置从配适右臂的状态转换为配适左臂的状态,具体步骤如下:
步骤一:将所述限位挡片114绕着所述安装底座113上两者的铰接点旋转打开,所述第一电机102不动,将所述上肢外骨骼装置的机械臂整体绕所述第一电机102的输出轴旋转180°后,将所述限位挡片114绕着所述安装底座113上两者的铰接点旋转闭合,如图11所示,图11为步骤一转换完成后的状态图;
步骤二:将所述第一限位挡板105滑到所述调节槽115的另一端,肩部第一关节调节完毕,如图12所示,图12为步骤二转换完成后的状态图,图12与图11相比只调节了所述第一限位挡板105;
步骤三:将所述第二限位挡板110从所述滑槽117的一侧调节到另一侧且用螺钉固定,如图13或图14所示,图13与图14视角不同、转换状态相同;
步骤四:将所述上肢外骨骼装置的机械臂绕所述第二电机107的输出轴旋转180°,肩部第二关节调节完毕,如图13或图14所示,图13与图14均为步骤三和步骤四转换完成后的状态图;
步骤五:将所述上肢外骨骼装置的上臂部分和小臂部分调节至垂直的状态,如图14所示,所述肘关节限位片305露出,方便调节;
步骤六:将所述旋转底座307旋转180°后,再将所述肘关节挡片308绕着所述旋转底座307上两者的铰接点旋转,如图15所示,图15为步骤六转换完成后的状态图;
步骤七:将所述上肢外骨骼装置的小臂部分绕肘关节处的铰接点旋转180°后,再将所述肘关节挡片308绕着所述旋转底座307上两者的铰接点旋转至原位,肘关节调节完毕,如图16所示,图16为步骤七转换完成后的状态图;
步骤八:将所有驱动电机复位置零,所述上肢外骨骼装置的右臂状态转换为左臂状态完成;
所述上肢外骨骼装置的左右臂状态转换过程相同,将所述可适配左右臂的上肢外骨骼装置从配适左臂的状态转换为配适右臂的状态,其具体过程与上述步骤相同;步骤一和步骤二用于调节肩部第一关节,步骤三和步骤四用于调节肩部第二关节,步骤五、步骤六和步骤七用于调节肘关节,所述肩部第一关节、肩部第二关节和肘关节的调节不分先后,上述步骤可根据实际操作调整顺序。
本发明所述的实施例仅仅是对本发明的优选实施方式进行的描述,并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。并非对发明构思和范围进行限定,本发明的范围仅由所附的权利要求来限制。在不脱离本发明设计思想的前提下,本领域中工程技术人员对本发明的技术方案做出的各种变型和改进,均应落入本发明的保护范围。
- 一种可适配左右臂的上肢外骨骼装置及其转换方法
- 一种可适配左右臂的上肢外骨骼装置及其转换方法