一种车辆导流机器人
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及车辆拦截领域,具体涉及一种车辆导流机器人。
背景技术
机器人(Robot)是一种能够半自主或全自主工作的智能机器,历史上最早的机器人见于隋炀帝命工匠按照柳抃形象所营造的木偶机器人,施有机关,有坐、起、拜、伏等能力,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
现有技术存在以下不足:现有的高速公路常见的车辆拦截方法是开车布放路锥,此方法存在两大问题:高速的车流时刻危及人车安全,摆放效率不高影响拦截的时效性,且普通的拦截机器人经常容易被撞坏,导致探测头受损,因此机器人拦截就显得非常重要。
因此,发明一种车辆导流机器人很有必要。
发明内容
为此,本发明提供一种车辆导流机器人,通过探测机构和旋转机构使车辆导流机器人进行运转,以解决高速的车流时刻危及人车安全,摆放效率不高影响拦截的时效性的问题。
为了实现上述目的,本发明提供如下技术方案:一种车辆导流机器人,包括机器人本体,所述机器人本体内壁固定嵌设有海绵,所述机器人本体底部固定嵌设有支架,所述海绵内壁固定嵌设有支撑内板,所述机器人本体内部设有探测机构和旋转机构;
所述探测机构包括第一往复丝杆,所述第一往复丝杆设于支撑内板内部并与支撑内板侧壁通过轴承连接,所述第一往复丝杆外部套设有第一轴承座并与第一轴承座通过滚珠螺母副连接,所述第一轴承座顶部固定连接有连接板,所述连接板顶部固定连接有第一探测头,所述第一探测头顶部固定连接有第一保护罩;
所述旋转机构包括第二往复丝杆,所述第二往复丝杆设于支撑内板内部并与支架内壁通过轴承连接,所述第二往复丝杆外部套设有第二轴承座,所述第二轴承座一端固定连接有支撑套筒,所述支撑套筒内部轴承连接有伸缩杆,所述伸缩杆底端连接有转动组件,所述转动组件包括第一支撑块,所述第一支撑块与伸缩杆固定连接。
优选的,所述转动组件包括第二支撑块,所述第二支撑块与伸缩杆固定连接。
优选的,所述探测机构还包括第三往复丝杆,所述第三往复丝杆设于支撑内板内部并与支撑内板通过轴承连接,所述第三往复丝杆底端轴承连接有第四支撑板,所述第四支撑板与支撑内板固定连接,所述第三往复丝杆外部套设有第三轴承座,所述第三往复丝杆与第三轴承座通过滚珠螺母副连接,所述第三轴承座一侧设有第一推板,所述第三轴承座与第一推板通过转轴活动连接,所述第一推板一端设有连接块,所述连接块一端固定连接有连接杆,所述连接杆一侧设有滑块,所述滑块一侧开设有滑槽,所述连接杆延伸入滑槽内部,所述滑块一端固定连接有第二探测头,所述第二探测头一侧固定连接有第二保护罩。
优选的,所述连接块与第一推板通过转轴活动连接,所述连接块一侧设有第二推板,所述连接块与第二推板通过转轴活动连接,所述第二推板一端与第四支撑板通过转轴活动连接。
优选的,所述机器人本体顶部固定嵌设有第一防护壳,所述第一探测头设于第一防护壳内部,所述机器人本体底部固定设有下壳体,所述下壳体两侧均设有移动轮。
优选的,所述支撑内板内壁分别固定嵌设有支撑底板和支撑侧板,所述支撑底板顶部固定连接有第一电机,所述第一电机输出端固定连接有传动轴,所述传动轴一端固定连接有第四锥齿轮,所述第四锥齿轮顶部和底部分别设有第三锥齿轮和第五锥齿轮,所述第四锥齿轮分别与第三锥齿轮和第五锥齿轮相啮合,所述第三锥齿轮和第五锥齿轮分别与第一往复丝杆和第二往复丝杆通过单向轴承连接,所述机器人本体内部固定设有蓄电池。
优选的,所述支撑内板内壁固定连接有第三支撑板,所述第三支撑板分别与第一往复丝杆和第二往复丝杆通过轴承连接,所述支撑内板内壁固定连接有第二支撑板,所述第二支撑板套设于伸缩杆外部并与伸缩杆通过轴承连接。
优选的,所述第三往复丝杆和第一往复丝杆外部均固定套设有皮带轮,所述皮带轮外部套设有皮带。
优选的,所述支撑侧板顶部固定连接有第二电机,所述第二电机输出端固定连接有传动杆,所述传动杆一端固定连接有第一锥齿轮,所述第一锥齿轮底部设有第二锥齿轮,所述第一锥齿轮与第二锥齿轮相啮合,所述第二锥齿轮与伸缩杆固定连接,所述传动杆外部套设有第一支撑板,所述第一支撑板与传动杆通过轴承连接,所述第一支撑板与支撑内板内壁固定连接。
优选的,所述机器人本体一侧固定嵌设有第二防护壳,所述第二探测头设于第二防护壳内部。
本发明的有益效果是:
1、本发明通过探测机构的设计,使第一探测头和第二探测头一起伸出和缩回,使其在探测时屏幕一直清晰,同时利用防护罩对其进行保护,避免进水,第二探测头和第一探测头从机器人本体伸出并对公路上的车辆速度、车辆距离以及行走轨迹是否有障碍进行数据收集,并控制移动轮移动对路面进行车辆进行拦截,提高其使用寿命,利用海绵对机器人本体以及内部进行保护,提高其使用年限;
2、本发明通过第一支撑块转动带动机器人本体转动并使机器人本体转换角度,方便机器人本体越过障碍继续移动,因此不会引起司机的误判,够在艰苦环境下长期待命,随时响应,避免高速的车流时刻危及人车安全,导致摆放效率不高影响拦截的时效性。
附图说明
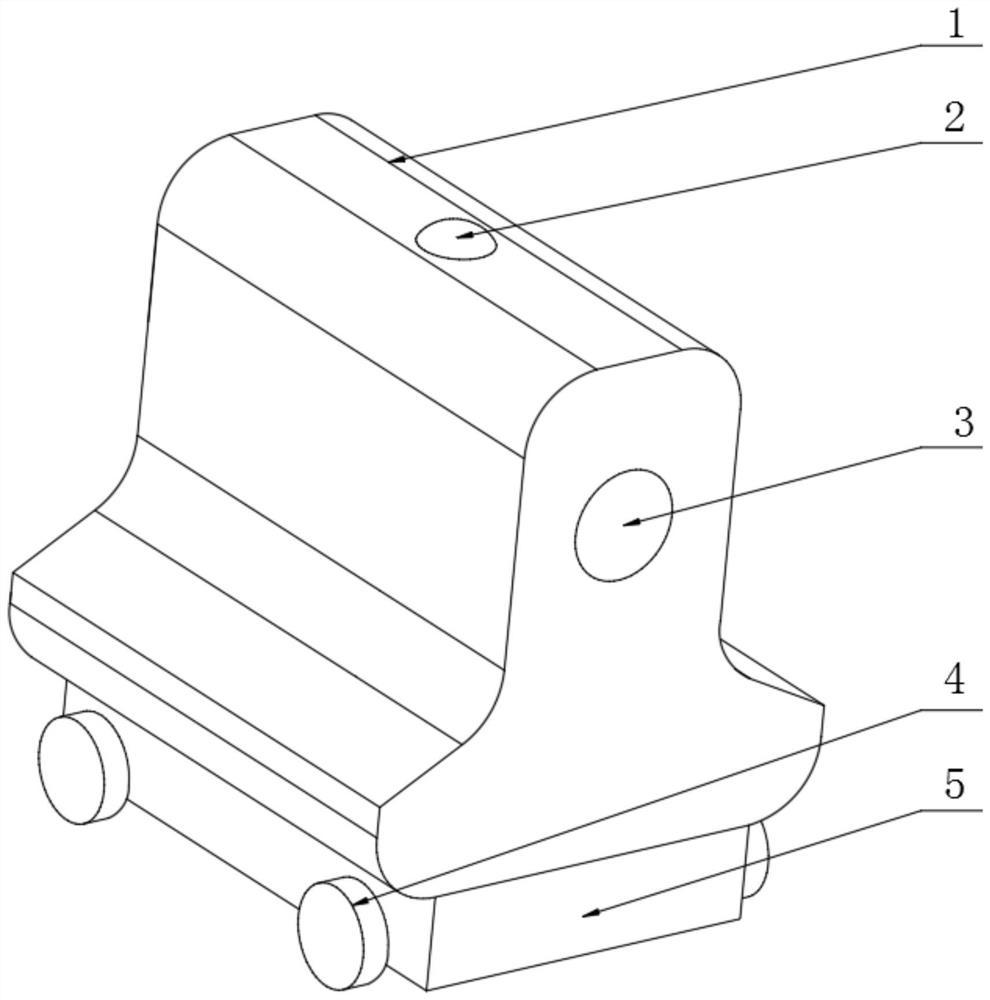
图1为本发明提供的整体结构示意图;
图2为本发明提供的主视剖视图;
图3为本发明提供的侧视图;
图4为本发明提供的图2中A处放大图;
图5为本发明提供的图2中B处放大图;
图6为本发明提供的实施列2结构示意图。
图中:1机器人本体、2第一保护罩、3第二保护罩、4移动轮、5下壳体、6第一探测头、7连接板、8第一往复丝杆、9第一电机、10传动轴、11支撑底板、12支撑内板、13海绵、14第二探测头、15第二电机、16支撑侧板、17支架、18第一支撑块、19伸缩杆、20支撑套筒、21第二往复丝杆、22第一轴承座、23皮带、24第一支撑板、25第一锥齿轮、26传动杆、27第二锥齿轮、28第二支撑板、29皮带轮、30第三锥齿轮、31第四锥齿轮、32第三支撑板、33第五锥齿轮、34第二轴承座、35第三轴承座、36第一推板、37连接块、38连接杆、39滑槽、40滑块、41第二推板、42第四支撑板、43第三往复丝杆、44第二支撑块。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例1,参照附图1-5,本发明提供的一种车辆导流机器人,包括机器人本体1,所述机器人本体1内壁固定嵌设有海绵13,所述机器人本体1底部固定嵌设有支架17,所述海绵13内壁固定嵌设有支撑内板12,所述机器人本体1内部设有探测机构和旋转机构;
所述探测机构包括第一往复丝杆8,所述第一往复丝杆8设于支撑内板12内部并与支撑内板12侧壁通过轴承连接,所述第一往复丝杆8外部套设有第一轴承座22并与第一轴承座22通过滚珠螺母副连接,所述第一轴承座22顶部固定连接有连接板7,所述连接板7顶部固定连接有第一探测头6,所述第一探测头6顶部固定连接有第一保护罩2;
所述旋转机构包括第二往复丝杆21,所述第二往复丝杆21设于支撑内板12内部并与支架17内壁通过轴承连接,所述第二往复丝杆21外部套设有第二轴承座34,所述第二轴承座34一端固定连接有支撑套筒20,所述支撑套筒20内部轴承连接有伸缩杆19,所述伸缩杆19底端连接有转动组件,所述转动组件包括第一支撑块18,所述第一支撑块18与伸缩杆19固定连接,第一探测头6具有测速、测距作用,第一保护罩2具有保护第一探测头6作用,第一支撑块18可带动机器人本体1转动,海绵13具有缓冲作用。
进一步地,所述探测机构还包括第三往复丝杆43,所述第三往复丝杆43设于支撑内板12内部并与支撑内板12通过轴承连接,所述第三往复丝杆43底端轴承连接有第四支撑板42,所述第四支撑板42与支撑内板12固定连接,所述第三往复丝杆43外部套设有第三轴承座35,所述第三往复丝杆43与第三轴承座35通过滚珠螺母副连接,所述第三轴承座35一侧设有第一推板36,所述第三轴承座35与第一推板36通过转轴活动连接,所述第一推板36一端设有连接块37,所述连接块37一端固定连接有连接杆38,所述连接杆38一侧设有滑块40,所述滑块40一侧开设有滑槽39,所述连接杆38延伸入滑槽39内部,所述滑块40一端固定连接有第二探测头14,所述第二探测头14一侧固定连接有第二保护罩3,第二探测头14具有测障碍物作用。
进一步地,所述连接块37与第一推板36通过转轴活动连接,所述连接块37一侧设有第二推板41,所述连接块37与第二推板41通过转轴活动连接,所述第二推板41一端与第四支撑板42通过转轴活动连接,连接块37具有连接支撑作用。
进一步地,所述机器人本体1顶部固定嵌设有第一防护壳,所述第一探测头6设于第一防护壳内部,所述机器人本体1底部固定设有下壳体5,所述下壳体5两侧均设有移动轮4,移动轮4方便机器人本体1移动。
进一步地,所述支撑内板12内壁分别固定嵌设有支撑底板11和支撑侧板16,所述支撑底板11顶部固定连接有第一电机9,所述第一电机9输出端固定连接有传动轴10,所述传动轴10一端固定连接有第四锥齿轮31,所述第四锥齿轮31顶部和底部分别设有第三锥齿轮30和第五锥齿轮33,所述第四锥齿轮31分别与第三锥齿轮30和第五锥齿轮33相啮合,所述第三锥齿轮30和第五锥齿轮33分别与第一往复丝杆8和第二往复丝杆21通过单向轴承连接,所述机器人本体1内部固定设有蓄电池,支撑底板11具有支撑第一电机9作用。
进一步地,所述支撑内板12内壁固定连接有第三支撑板32,所述第三支撑板32分别与第一往复丝杆8和第二往复丝杆21通过轴承连接,所述支撑内板12内壁固定连接有第二支撑板28,所述第二支撑板28套设于伸缩杆19外部并与伸缩杆19通过轴承连接,第三支撑板32具有支撑作用。
进一步地,所述第三往复丝杆43和第一往复丝杆8外部均固定套设有皮带轮29,所述皮带轮29外部套设有皮带23,皮带23具有传动作用。
进一步地,所述支撑侧板16顶部固定连接有第二电机15,所述第二电机15输出端固定连接有传动杆26,所述传动杆26一端固定连接有第一锥齿轮25,所述第一锥齿轮25底部设有第二锥齿轮27,所述第一锥齿轮25与第二锥齿轮27相啮合,所述第二锥齿轮27与伸缩杆19固定连接,所述传动杆26外部套设有第一支撑板24,所述第一支撑板24与传动杆26通过轴承连接,所述第一支撑板24与支撑内板12内壁固定连接,传动杆26具有支撑作用。
进一步地,所述机器人本体1一侧固定嵌设有第二防护壳,所述第二探测头14设于第二防护壳内部,第二防护壳具有保护第二探测头14作用。
本发明的使用过程如下:在使用本发明时,本发明连接移动电源,平时放置在路缘带上,战时远程一键启动或联动触发,迅速到达预设位置,形成拦截曲线,启动后机器人本体1会被下壳体5两侧的移动轮4带动指定位置,在移动时,第一电机9启动,第一电机9启动带动传动轴10正转,传动轴10正转带动第四锥齿轮31正转,第四锥齿轮31正转带动第三锥齿轮30正转,第五锥齿轮33受单向轴承影响不转,第三锥齿轮30正转带动第一往复丝杆8转动,第一往复丝杆8转动第一轴承座22向上移动,第一轴承座22向上移动带动连接板7向上移动,连接板7移动带动第一探测头6从第一防护壳伸出,第一保护罩2具有保护第一探测头6避免第一探测头6进雨水,第一往复丝杆8转动带动皮带轮29转动,皮带轮29转动带动皮带23转动,皮带23转动使第三往复丝杆43转动,第三往复丝杆43转动带动第三轴承座35向下移动,第三轴承座35移动带动第一推板36和第二推板41向一侧推动,第一推板36和第二推板41推动连接块37向一侧移动,连接块37推动连接杆38在滑槽39内滑动并推动滑块40向外移动,滑块40移动带动第二探测头14向外移动,第二探测头14和第一探测头6从机器人本体1伸出并对公路上的车辆速度、车辆距离以及行走轨迹是否有障碍进行数据收集,并控制移动轮4移动对路面进行车辆进行拦截,当所有机器人本体1到达指定位置时,第一电机9带动传动轴10反转,传动轴10带动第四锥齿轮31反转,第四锥齿轮31带动第五锥齿轮33反转,第五锥齿轮33转动带动第二往复丝杆21转动,第二往复丝杆21转动带动第二轴承座34向下移动,第二轴承座34向下移动带动支撑套筒20向下移动,支撑套筒20向下移动带动伸缩杆19向下移动,伸缩杆19向下移动带动第一支撑块18移动,第一支撑块18移动并将机器人本体1撑起,此时第二电机15控制传动杆26转动,传动杆26带动第一锥齿轮25转动,第一锥齿轮25带动第二锥齿轮27转动,第二锥齿轮27转动带动伸缩杆19转动,伸缩杆19转动带动第一支撑块18转动,第一支撑块18转动带动机器人本体1转动并使机器人本体1转换角度,方便机器人本体1越过障碍继续移动,因此不会引起司机的误判,够在艰苦环境下长期待命,随时响应,且能对第一探测头6和第二探测头14收入机器人本体1内进行保护,提高其使用寿命。
实施例2,参照附图6,本发明提供的一种车辆导流机器人,所述转动组件包括第二支撑块44,所述第二支撑块44与伸缩杆19固定连接。
本发明的使用过程如下:在使用本发明时,第一电机9带动传动轴10反转,传动轴10带动第四锥齿轮31反转,第四锥齿轮31带动第五锥齿轮33反转,第五锥齿轮33转动带动第二往复丝杆21转动,第二往复丝杆21转动带动第二轴承座34向下移动,第二轴承座34向下移动带动支撑套筒20向下移动,支撑套筒20向下移动带动伸缩杆19向下移动,伸缩杆19向下移动带动第二支撑块44移动,第二支撑块44移动并将机器人本体1撑起,此时第二电机15控制传动杆26转动,传动杆26带动第一锥齿轮25转动,第一锥齿轮25带动第二锥齿轮27转动,第二锥齿轮27转动带动伸缩杆19转动,伸缩杆19转动带动第二支撑块44转动,第二支撑块44转动带动机器人本体1转动并使机器人本体1转换角度,方便机器人本体1越过障碍继续移动,因此不会引起司机的误判,够在艰苦环境下长期待命,随时响应,且能对第一探测头6和第二探测头14收入机器人本体1内进行保护,提高其使用寿命,第二支撑块44抓地力更强。
以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
- 一种车辆导流机器人
- 一种导流罩智能调节系统和方法及自调节导流罩和车辆