监测机器的制动性能
文献发布时间:2023-06-19 11:57:35
背景技术
本发明涉及一种监测机器的制动性能的方法和用于执行这种方法的系统。
机器的制动系统通常配置成提供预定的制动性能。预定的制动性能可以例如是制动系统使机器从预定速度停止所需的距离和/或时间的量度。机器通常需要基于某些条件满足制动性能的某些标准,诸如当在一定倾角上制动时,当机器具有一定负载时等。这样的机器可以包括牵引机,诸如倾卸卡车,非公路卡车,公路货车/卡车,采矿卡车,铰接式拖车,运土机器,诸如反铲挖土机、装载机、推土机、铲车、自动平地机、轮式牵引机铲土机、挖掘机和其他这样的车辆。
可能期望在制动系统的操作期间和随着时间连续地监测制动系统的制动性能。通常的方法是对制动系统执行视觉、静态检查以确定其是否满足某些标准,诸如预定的制动衬块磨损等。可替代地,US-B1-6332354公开了确定车辆制动系统的有效性。手动或自动测量车辆质量,在车辆减速期间测量制动系统压力,测量道路坡度以及测量车辆的空气摩擦和发动机摩擦。基于在类似环境下表示这些参数的数据来计算车辆的预测减速度。使用预测的减速度和测量的实际减速度计算制动有效性。然而,可能需要进一步的改进以提高制动性能确定的准确性和可靠性。
发明内容
本发明提供通过检测用于使机器减速的制动接合,确定在制动接合期间使机器减速的寄生损失,以及使用在制动接合期间基于寄生损失的机器的预测减速度来确定制动性能,从而监测机器的制动系统的制动性能。
本发明还提供一种用于监测包括制动系统的机器的制动性能的系统。该系统包括用于监测制动系统的制动性能的控制系统,该控制系统检测用于使机器减速的制动接合,测量在制动接合期间使机器减速的寄生损失,基于测量的寄生损失处理在制动接合期间机器的预测减速度,以及基于预测减速度确定制动性能。
本发明提供了一种存储用于执行本发明中阐述的方法的计算机执行指令的计算机可读介质。本发明的方法可以包括操作控制系统以执行该方法。
本发明的其他方面在以下编号的条款中阐述:
1.一种监测机器的制动系统的制动性能的方法,所述方法包括:
检测用于使机器减速的制动接合;
确定在所述制动器接合期间使所述机器减速的寄生损失;
基于所述寄生损失确定在所述制动器接合期间所述机器的预测减速度;和
基于所述预测减速度来确定制动性能。
2.如条款1所述的方法,在所述制动接合期间检测所述机器的实际减速度,并且基于所述实际减速度和预测减速度来确定所述制动性能。
3.如前述条款中任一项所述的方法,其中所述预测减速度是基于在所述制动接合期间测量的所述制动系统的至少一个操作条件以及制动图来进一步确定的。
4.如条款3所述的方法,其中所述制动系统的至少一个操作条件包括制动系统压力、所述机器的倾角、所述机器的质量以及所述机器的拖曳力中的至少一个。
5.如前述条款中任一项所述的方法,其中所述寄生损失包括所述机器的估计滚动阻力。
6.如条款5所述的方法,其中,基于在所述制动接合之前和/或在所述制动接合期间所测量的所述机器的至少一个操作条件来估计所述滚动阻力。
7.如条款5或条款6所述的方法,其中所述滚动阻力是基于所述机器的估计驱动力和所述机器的实际加速度来估计。
8.如条款7所述的方法,其中基于查找表和至少一个操作条件和/或基于驱动所述机器的至少一个车轮的估计驱动扭矩和所述至少一个车轮的已知半径来确定所述估计驱动力。
9.如条款6至8中任一项所述的方法,其中所述至少一个操作条件包括所述机器的位置,并且所述滚动阻力是基于所述机器的位置和指示所述机器所行进穿过的地形的估计滚动阻力的图来估计。
10.如前述条款中任一项所述的方法,其中所述寄生损失包括在所述制动接合期间所述机器中的估计风阻损失。
11.如条款10所述的方法,其中所述估计风阻损失在所述机器的至少一个旋转部件中。
12.如条款11所述的方法,其中所述发动机系统和制动系统中的至少一个包括所述至少一个旋转部件。
13.如条款11或条款12所述的方法,其中估计所述风阻损失包括:
确定与所述至少一个旋转部件接触的油的至少一个油温;
确定所述至少一个旋转部件的至少一个旋转速度;
检索风阻损失数据;和
基于所述至少一个油温、至少一个旋转速度和风阻损失数据来确定所述风阻损失。
14.如前述条款中任一项所述的方法,其中所述预测减速度是基于对由所述估计风阻损失和/或所述估计滚动阻力所产生的减速度的估计来确定的。
15.如前述条款中任一项所述的方法,还包括基于所确定的制动性能生成警报。
16.如条款15所述的方法,包括确定所述制动性能已经达到最小制动性能阈值,并且作为响应,生成所述警告。
17.如前述条款中任一项所述的方法,其包括:
确定在所述制动器接合期间是否出现至少一个拒绝条件,包括确定所述寄生损失是否超过阈值;和
响应于检测到至少一个拒绝条件,拒绝与制动接合相关联的制动性能数据或者阻止与所述制动接合相关联的制动性能数据的生成。
18.如条款17所述的方法,其中确定所述寄生损失是否超过阈值包括:
估计所述机器的滚动阻力并确定所述估计滚动阻力超过滚动阻力阈值;和/或
估计所述制动接合期间所述机器中的风阻损失,并确定所述风阻损失超过风阻损失阈值;和
19.如条款17或条款18所述的方法,其中拒绝生成的制动性能数据包括:
防止将所述生成的制动性能数据存储在存储器上;
在所述存储器上存储制动性能数据,所述制动性能数据包括制动性能和与所述制动性能相关联的拒绝标记;和/或
在进一步分析与多个制动接合相关的制动性能期间,忽视所生成的制动性能。
20.一种系统,其包含:
包括制动系统的机器;和
控制系统,其用于监测所述制动系统的制动性能并且被配置成:
检测用于使机器减速的制动接合;
确定在所述制动器接合期间使所述机器减速的寄生损失;
基于所述寄生损失确定在所述制动器接合期间所述机器的预测减速度;和
基于所述预测减速度来确定制动性能。
附图说明
仅作为示例,现在参考附图并如附图所示来描述本发明的方法和系统的实施方案,其中:
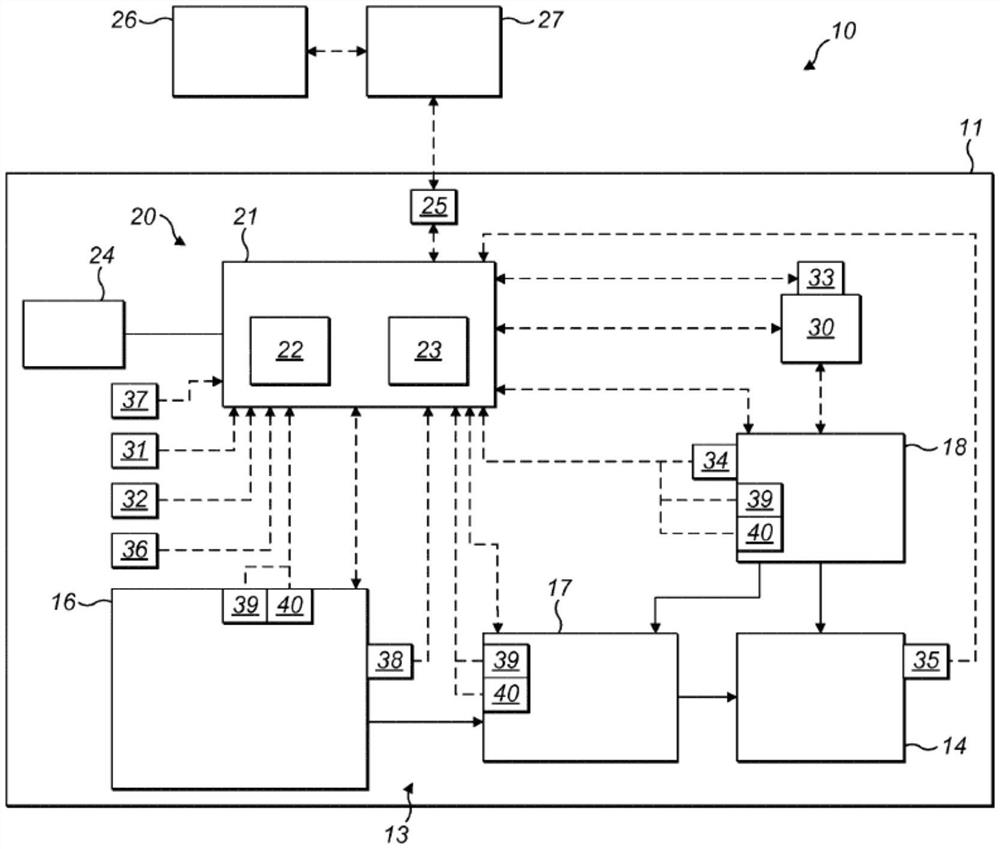
图1是根据本发明的系统的实施方案的示意图;
图2是图1的系统的机器的实施方案的示意图;
图3是根据本发明的方法的实施方案的流程图;
图4是示出随时间推移制动性能相对于制动接合的曲线图;
图5是根据本发明的方法的另一实施方案的流程图;
图6是示出机器速度相对于在制动接合期间行进的距离的曲线图;和
图7是根据本发明的方法的另一实施方案的流程图。
具体实施方式
随后的描述仅提供了优选的示例性实施方案,并且不旨在限制本发明的范围、适用性或配置。相反,下面对优选示例性实施方案的描述将向本领域的技术人员提供用于实现本发明的优选示例性实施方案的可行描述,应当理解,在不脱离本发明的范围的情况下,可以对元件的功能和布置进行各种改变,包括不同实施方案的特征的组合。在以下描述中给出了具体细节以提供对实施方案的透彻理解。然而,本领域的普通技术人员将理解,可以在没有这些具体细节的情况下实践实施方案。例如,公知的电路、过程、算法、结构和技术可以不示出不必要的细节以避免使实施方案模糊。
此外,应当注意,实施方案可以被描述为被描述为流程图、流程图图示、数据流程图图示、结构图或框图的过程。尽管流程图都可以将操作描述为顺序过程,但是许多操作可以并行或同时执行。此外,可以重新布置操作的顺序。过程在其操作完成时终止,但可具有图中未包括的附加步骤。过程可以对应于方法、函数、过程、子例程、子程序等。当过程对应于函数时,其终止对应于函数返回到调用函数或主函数。此外,如本文所揭示,术语″存储介质″可表示用于存储数据的一个或一个以上装置、包括只读存储器(ROM)、随机存取存储器(RAM)、磁性RAM、核心存储器、磁盘存储介质、光学存储介质、快闪存储器装置和/或用于存储信息的其他机器可读介质。术语″计算机可读媒体″包括(但不限于)便携式或固定存储装置,光学存储装置,无线信道和能够存储、含有或携带指令和/或数据的各种其他介质。
此外,实施方案可由硬件、软件、固件、中间件、微码、硬件描述语言或其任何组合来实施。当在软件、固件、中间件或微代码中实现时,执行必要任务的程序代码或代码段可以存储在诸如存储介质的机器可读介质中。处理器可以执行必要的任务。代码段可以表示过程,函数,子程序,程序,例程,子例程,模块,软件包,类,或者指令、数据结构或程序语句的任何组合。通过传递和/或接收信息、数据、自变量、参数或存储器内容,代码段可耦合到另一代码段或硬件电路。可以经由包括存储器共享、消息传递、令牌传递、网络传输等在内的任何合适的方式来传递、转发或传输信息、自变量、参数数据等。
应当理解,以下公开内容提供了用于实现各种实施方案的不同特征的许多不同实施方案或示例。以下描述了部件和布置的具体示例以简化本发明。当然,这些仅是示例,并非旨在进行限制。此外,本发明可以在各种示例中重复附图标记和/或字母。这种重复是为了简单和清楚的目的,并且其本身不规定所讨论的各种实施方案和/或配置之间的关系。此外,在下面的描述中,在第二特征上方或之上形成第一特征可以包括其中直接接触地形成第一和第二特征的实施方案,并且还可以包括其中插入第一和第二特征可以形成附加特征的实施方案,使得第一和第二特征可以不直接接触。
本发明总体上涉及监测机器的制动系统的性能以及包括被配置成执行此类方法的控制系统的系统。可以基于制动接合期间的预测减速度和测量减速度来确定制动性能。预测的减速度可以考虑机器的滚动阻力和风阻损失。可以过滤制动性能数据以排除由发生打滑的制动接合产生的数据。该性能可以通过识别在更长的时间段内制动性能的变化率的实质性变化或增加来监测。还可以通过确定指示制动接合的操作者与制动系统实际接合之间的制动延迟来进一步评估和/或分析该性能。
图1示出了包括机器11的本发明的系统10的实施方案,该机器在图2中更详细地示出。机器11可以是任何类型的机器或车辆,诸如所示的铰接式运输车。在其他实施方案中,机器11可以包括任何其他类型的拖运机器或车辆(即,被配置成主要用于运输散装材料),作业和/或材料搬运机器或车辆(即,被配置成执行作业的机器),诸如倾卸卡车、非公路卡车、公路货车/卡车、采矿卡车、铰接式拖车、反铲挖土机、装载机、推土机、铲运机、轮式拖拉机铲运机、钻机、机动平地机、林业机器、挖掘机等。机器11可以包括用于执行作业的至少一个作业工具12,诸如所示的翻斗车身、铲斗、剪切机、叉、锤、犁、操作臂、多处理器、粉碎机、锯、剪切机、鼓风机、研磨机、耕作机、压实机、挖沟机、绞盘、螺旋钻、刀片、扫帚、切割机、刨床、木材、伐木头、抓斗、挖土机、松土机、耙或类似物。
机器11可以包括发动机系统13,该发动机系统被配置成用于驱动至少一个车轮14以使机器11在地形15上移动。至少一个车轮14可以驱动附接到其上的多个履带或类似物。发动机系统13可以包括被配置成驱动动力系17的至少一个动力单元16(例如,内燃发动机、电动机和/或液压马达)。动力系17可以包括用于从发动机系统13传递动力以驱动至少一个车轮14的至少一个变速器、变矩器、分动齿轮、输出轴、车轴等。
机器11可包括用于在机器11在地形15上移动时使机器减速的制动系统18。制动系统18可以是任何合适的类型,诸如空气制动系统或液压制动系统,并且可以配置成选择性地将制动力施加到至少一个车轮14和/或动力系17。制动系统18可以包括至少一个垫、至少一个转子、至少一个鼓、至少一个活塞和/或类似物。在空气制动系统的情况下,它可以包括空气分配系统,该空气分配系统包括包含用于控制制动系统18的应用的加压空气的制动室。除了制动系统18之外,机器11可以包括用于降低其速度的替代装置,诸如发动机制动系统或液力减速器。
系统10可以包括控制系统20,控制系统可以被配置为执行本发明的方法。控制系统20可以包括控制器21,控制器可以包括存储器22和处理单元23,存储器可以以数据的形式存储指令或算法,处理单元可以被配置为基于指令执行操作。控制器21可以是任何合适的已知类型并且可以包括发动机控制单元(ECU)等。存储器22可以包括用于存储计算机程序指令的任何合适的计算机可访问或非瞬态存储介质,诸如RAM、SDRAM、DDR SDRAM、RDRAM、SRAM、ROM、磁介质、光介质等。处理单元23可以包括能够执行存储器存储的指令的任何合适的处理器,诸如微处理器、单处理器、多处理器等。控制器21进一步可以包括图形处理单元,用于绘制对象以便在控制系统20的显示器24上观看。控制器21还可以与至少一个机器通信模块25通信,用于经由有线或无线网络27(诸如以太网、光纤、卫星通信网络、宽带通信网络、蜂窝、蓝牙等)与外部计算系统26传送数据。外部计算系统26可以包括计算系统、处理器、服务器、存储器、数据库、控制系统等。
控制器21可以通信地连接(经由有线或无线连接)到动力单元16、动力系17和/或制动系统18,用于向动力单元、动力系和/或制动系统提供控制信号并且从动力单元、动力系和/或制动系统接收传感器信号,以便控制机器11的操作。控制器21可以与至少一个输入装置通信,诸如显示器24、操纵杆、按钮和制动输入30,用于接收输入并控制机器11。如图所示,可以包括制动踏板的制动输入30可以与控制器21和/或制动系统18通信,用于控制制动系统18的致动和接合以使机器11减速。
控制器21可以通过与至少一个传感器和/或与动力单元16、动力系17和/或制动系统18通信地联接来接收指示机器11的至少一个操作条件的操作条件数据。控制器21可以处理所接收的操作条件数据以确定进一步的操作条件数据并且可以将操作条件数据存储在存储器22上。该至少一个操作条件和操作条件数据可以包括以下各项中的至少一项:
-机器11相对于重力方向的倾角θ(如图2中所示)。控制系统20可以包括用于在二维或三维中确定机器11在地形15上的倾角θ的倾斜传感器31;
-机器11的位置。控制系统20可以包括导航系统32,例如包括用于经由全球导航卫星系统确定位置的位置传感器,用于确定机器11的位置;
-制动输入30致动,其可以包括施加到制动输入30的力。机器11可以包括制动输入传感器33,制动输入传感器可以包括踏板位置传感器,用于确定制动输入30是否已经由操作者致动;
-制动系统18内的压力,其可以指示制动系统18的接合。控制系统20可以包括用于确定制动系统压力的制动系统压力传感器34;-至少一个车轮14的车轮速度。控制系统20可以包括用于确定车轮速度的至少一个车轮速度传感器35;
-机器11的质量,其可以是机器11的负载或重量以及由机器11运输的任何有效载荷。该质量可以由操作者经由至少一个输入装置来输入,存储在存储器22上和/或基于有效载荷估计器36来估计。有效载荷估计器36可以包括用于检测由机器11承载的有效载荷的质量的至少一个载荷传感器;
-机器11的加速或减速。控制系统20可以包括惯性测量单元37(IMU)和/或可以利用车轮速度传感器35来确定加速度;
-机器11的机器速度,其可以经由IMU 37、至少一个车轮速度传感器35、动力系速度传感器(诸如发动机速度传感器38)和/或导航系统32来确定;
-发动机速度,其可以是机器11的至少一个动力单元16的至少一个输出轴的旋转速度。控制系统20可以包括用于确定发动机速度的发动机速度传感器38;
-动力系17的变速器的传动比。可以基于从控制器21发送到动力系17和/或动力系17内的传动比传感器的要求传动比来确定传动比;和/或
-与发动机系统13、动力系17或制动系统18的至少一个旋转部件接触的油的油温以及至少一个旋转部件的旋转速度。油可以是润滑和/或冷却油。控制系统20可以包括用于确定油温和转速的至少一个油温传感器39和至少一个发动机系统部件速度传感器40。
IMU 37可以包括倾斜传感器31。可以基于IMU 37和至少一个车轮速度传感器35的输出来确定倾角θ。具体地,至少一个车轮14的加速度或减速度可以经由至少一个车轮速度传感器35以及通过考虑至少一个车轮14在IMU 37的输出中的这种加速度或减速度而确定的倾角θ来确定。
由控制系统20收集的操作条件数据可以被传输到外部计算系统26,该外部计算系统可以执行本发明的方法。因此,控制系统20在本发明中可以被认为包括外部计算系统26,外部计算系统可以具有存储在其上的用于以类似于控制器21的方式执行在此公开的方法的指令。
图3示出了监测本发明的系统10的制动系统18的制动性能的方法50。制动性能可以指示制动系统18在接合制动系统18时使机器11减速的有效性,例如使机器11从预定速度停止所需的距离或时间。制动性能可以在制动系统18的整个生命周期中变化,诸如由于部件(诸如制动垫)的标准磨损。制动性能可以在机器11的正常操作期间由控制系统20基本上连续地评估。制动性能可以由控制系统20通过确定在制动接合期间机器11的实际减速度(AD)和预测减速度(PD)来确定。特别地,制动性能(BP)可以被确定为如下值:
BP=AD/PD
在步骤51,操作者可以经由制动输入30施加制动系统18。在步骤52,控制系统20可以起始地检测所产生的制动接合。制动接合或制动事件可以是应用制动系统18以使机器11减速的单个实例。可以基于来自制动输入传感器33、至少一个制动系统压力传感器34和/或指示制动系统18已经被接合的至少一个车轮速度传感器35中的至少一个的操作条件数据来检测制动接合。可以基于来自多个车轮速度传感器35的操作条件数据来检测制动接合,以便提高准确度并且考虑例如每个车轮所附接的不同车轴由于动力系17中的差速器的运行而以较低速度运行的情况。
还可以基于来自制动系统压力传感器34的操作条件数据来检测制动接合,该制动系统压力传感器位于制动系统18中的制动输入30处或附近,用于检测操作者在制动输入30处的施加和/或来自制动系统压力传感器34在制动输入处的施加,该制动系统压力传感器位于该制动系统18中在至少一个车轮14处或附近,诸如在致动制动卡钳或活塞的流体中,用于检测制动系统18对至少一个车轮14进行减速的施加。控制系统20还可以确定发动机制动和/或液力减速器被接合,这将使制动性能数据无效,控制系统20可以拒绝或不生成制动性能数据。
控制系统20可在步骤53的制动接合期间确定机器11的实际减速度。实际减速度可以基于在制动接合期间在控制器21处从IMU 37和/或车轮速度传感器35接收的减速度数据来确定。
预测减速度可以由控制系统20基于在制动接合期间测量的制动系统18的至少一个操作条件和存储在控制系统20的存储器22上的制动图确定。制动图可以包括存储用于使得能够基于至少一个制动系统操作条件计算预测减速度的数据的表格、图表等。制动图可以从在测试期间以预定(例如,最佳或100%)制动性能操作机器11或类似机器11所获得的测试数据来填充,诸如当制动系统18完全由未磨损部件服务时。方法50可以包括在步骤54处从测试数据生成制动图。该测试数据可以指示与机器11的实际测量减速度(AMD)、机器11的质量(M)、制动系统操作条件(BSOC)相关联的制动力(BF)以及指示制动系统操作条件和制动力之间的关系的常数(k):
BF=BSOC×k=AMD×M
制动图可以包括在多个制动系统操作条件下的多个这样的值。制动系统操作条件可以包括来自至少一个制动系统压力传感器34的制动系统压力(制动系统压力传感器可以位于制动系统18中的制动输入30处或附近,用于检测操作者在制动输入30处的施加),从制动输入传感器33施加到制动踏板的力,来自制动输入传感器33的制动踏板的位置(其可以与制动系统压力具有直接关系)等。制动图可以提供针对不同制动系统操作条件的组合的值。
为了确定预测减速度,方法50可以包括在步骤55从存储器22中检索制动图。方法50可以包括在控制系统20处接收指示在步骤56的制动接合期间的至少一个制动系统操作条件和在步骤57的质量的数据。在步骤58,控制系统20可以基于制动图确定与测量的制动系统操作条件和质量相对应的制动力。在步骤59,控制系统20可以基于来自倾斜传感器31(可以是IMU 37)和车轮速度传感器35的输出来确定机器11的倾角θ。在步骤60,控制系统20可以确定作用在机器11上的拖曳力(DF),诸如空气动力学拖曳力和发动机摩擦。拖曳力可以从在制动接合期间测量的各种操作参数(诸如机器速度、发动机转速和功率单元输出扭矩)来估计。结果,可以在步骤61基于制动图、至少一个制动系统操作条件、质量、倾角θ和拖曳力确定预测减速度为(其中g是重力):
PD=(BF/M)-(g×sinθ)-(DF/M)
在可选实施方案中,预测减速度可以不考虑拖曳力和/或倾角θ。进一步可替代地,预测减速度可以替代地基于由操作者经由至少一个输入提供的值和/或基于存储在存储器22中的最小可接受减速度。
控制系统20可以在步骤62确定制动性能并且在步骤63将用于制动接合的制动性能作为制动性能数据存储在其存储器22上。制动性能数据可以经由网络27被传送到外部计算系统26。如果制动性能下降到最小制动性能阈值以下,则在步骤64可以经由显示器24、灯等向操作者提供警报。控制系统20可以通过在机器11的正常操作期间继续收集用于多个制动接合的制动性能数据并将它们作为制动性能数据存储在存储器22上以便以后检索、处理和/或显示24来连续地重复方法50。
控制系统20可以确定在制动接合期间使机器11减速的寄生损失。寄生损失可以包括估计滚动阻力和/或估计风阻损失。结果,除了制动系统18之外,控制系统20可以考虑在机器11的减速中作用的附加力。
控制系统20还可以估计机器11在制动接合期间或就在制动接合之前的滚动阻力,并基于估计滚动阻力确定制动性能。滚动阻力可以包括由地形15与至少一个车轮14之间的接触(诸如由于至少一个车轮14和/或地形15的变形)引起的能量损失。
滚动阻力可以基于在制动接合之前和/或在制动接合期间测量的机器11的至少一个操作条件来估计。滚动阻力可以沿着机器11的行进路径沿着多个位置多次和/或连续地计算,并且可以使用任何合适的已知方法计算。滚动阻力可以基于机器11的估计驱动力F
可以基于估计驱动力F
F
有效倾角θ
θ
θ
可替代地,滚动阻力可以从指示机器11行进穿过的地形15的估计滚动阻力的图估计。可以通过估计机器11和其他机器11在制动接合之前在地形15上行进时的滚动阻力来生成该图。该图可以将滚动阻力的估计值存储为估计滚动阻力倾角θ
在步骤61,可以通过将由估计滚动阻力产生的预期减速度并入到制动性能的计算中来确定制动性能。该估计滚动阻力可以在步骤70中确定并且可以使用该有效倾角θ
PD=(BF/M)-(g×sinθ
随后可以基于结合滚动阻力的该预测减速度和如果制动性能超过阈值则提供给操作者的警告,如上所述计算制动性能。
控制系统20还可估计机器11在制动接合期间的风阻损失,并基于估计风阻损失确定制动性能。风阻损失可以在发动机系统13的旋转部件(例如,轴、齿轮、离合器)(在动力系17的至少一个中,包括轴、变矩器、其变速器或动力单元16),制动系统18或与油接触的机器11的任何其他旋转部件中。油可以是制动冷却油、齿轮润滑油、液压油等。风阻损失可以包括由例如动力系17中的油溅向旋转部件和/或由于这些部件的旋转而在动力系17内产生的风产生的能量损失。因此,油的粘度以及因此油的温度可以影响风阻损失。特别地,在发动机系统13的暖机期间,油可以升高温度使得风阻损失变化。这种变化可以在较重机器11中放大,较重机器在旋转部件周围具有较重的油。控制系统20可以考虑风阻损失的这种变化,以便提高制动性能评估的准确度。
特别地,控制系统20可以在存储器22上存储风阻损失数据,该风阻损失数据表示在旋转部件的多个油温和多个旋转速度下由于风阻损失引起的功率损失。风阻损失数据可以通过在多个油温和旋转速度下测试旋转部件并且确定相关联的功率损失来收集。
控制系统20可以被配置成用于在制动接合期间从至少一个油温传感器39和至少一个发动机系统部件速度传感器40确定至少一个旋转部件的至少一个油温和至少一个旋转速度。因此,在步骤71,控制系统20可以基于至少一个油温、至少一个旋转速度和风阻损失数据来估计相关联的功率损失。具体地,控制系统20可以通过测量其相关联的油温和旋转速度中的每一个来估计由多个旋转部件引起的功率损失。使机器11减速的所产生的风阻制动力(WBF)可以基于估计功率损失(PLP)、车轮速度(WS)和已知的车轮半径(R
WBF=PL/(WS×R
因此,由于风阻损失所产生的减速度(DW)可以被确定为:
DW=WBF/M=PL/(WS×R
结果是预测减速度可以如下在步骤61确定(可选地包括拖拽力和滚动阻力):
PD=(BF/M)-(g×sinθ
随后可以基于结合风阻损失的该预测减速度和如果制动性能超过阈值则提供给操作者的警告,如上所述计算制动性能。
当动力系17的全部或部分中的风阻损失将不影响减速度时,控制系统20可以确定在确定预测减速度时不应考虑动力系17的全部或部分中的风阻损失。特别地,如果变速器处于空挡使得没有功率被传递,则控制系统20可以仅考虑变速器的断开联接点(例如,离合器或扭矩转换器)与至少一个车轮14之间的风阻损失。因此,如果检测到动力系17中的部件之间的断开联接,则控制系统20可以在步骤71仅针对动力系17的在断开联接和至少一个车轮14之间的至少一个部件而言基于至少一个油温、至少一个旋转速度和风阻损失数据来估计相关的动力损失。该方法的其余部分可以如上所述。可以通过至少一个动力系速度传感器和/或用于确定部件在动力系17中是否被联接或去联接的其他传感器来检测是否已经发生去联接。
控制系统20还可以考虑发生至少一个拒绝状况的制动接合来确定制动性能。至少一个拒绝条件可以是滑动件,其中至少一个轮14锁定或停止旋转,同时机器11继续沿着地形15移动。
因此,方法50可以包括在步骤72检测到在制动接合期间发生了打滑。滑动可以使用任何合适的方法或装置来检测,诸如已知的防抱死制动系统(ABS)。可以基于来自IMU 37的指示机器11正在减速的输出和来自至少一个车轮速度传感器35的指示车轮在制动接合期间没有旋转的输出来检测打滑。
方法50可以包括,在步骤73,拒绝与制动接合相关联的制动性能数据或者阻止与制动接合相关联的制动性能数据的产生或存储。控制系统20可以不处理或拒绝步骤53、55、56、57、58、59、60、61、64、70、71中任一个的相关操作条件数据以产生与制动接合相关联的制动性能数据。可替代地,控制系统可以不执行计算制动性能的步骤62或在存储器22上存储制动性能的步骤63。因此,用于评估制动系统18的制动性能的制动性能数据可以不包括发生打滑的制动接合的制动性能数据。
可替代地,控制系统20仍然可以经由方法50确定与制动接合相关联的制动性能,但是将拒绝该制动性能。如果制动性能涉及发生打滑的制动接合,则控制系统20可在存储器22上存储包括制动性能和与制动性能相关联的拒绝标记的制动性能数据。在进一步分析与多个制动接合相关的制动性能数据期间,控制系统20可以忽视具有相关联的拒绝标记的制动性能。
至少一个拒绝条件还可以基于估计滚动阻力和/或风阻损失。以类似于以上讨论的方式,控制系统20可以在步骤72确定估计滚动阻力和/或风阻损失。在步骤73,如果滚动阻力超过滚动阻力阈值和/或如果风阻损失超过风阻损失阈值,则控制系统20可以拒绝与制动接合相关联的制动性能数据或防止产生或存储与制动接合相关联的制动性能数据。结果,可以考虑滚动阻力或风阻损失可能导致不可靠的制动性能数据的情况来评估制动性能。
在本发明的实施方案中,车轮旋转传感器监测机器的车轮的旋转。当机器的至少一个车轮的旋转在制动事件期间停止时,例如当机器在制动事件期间减速时,向控制系统20发送信号。当控制系统20在制动事件期间接收机器车轮中的一个已经锁定/打滑的信号时,或者当满足至少一个拒绝条件时,控制系统20可以使制动事件无效并且拒绝与制动事件相关联的所有数据,或者防止生成与制动事件相关联的制动性能数据。
控制系统20可以在机器11的正常操作期间和/或在机器11的测试期间连续地确定考虑打滑、滚动阻力和/或风阻损失的制动性能,以填充用于计算在预测减速度计算中使用的制动力的制动图。
控制系统20还可以通过处理指示多个制动接合上的制动性能的制动性能数据来确定制动性能。控制系统20可以基于制动性能在至少两个制动接合与阈值之间的变化来识别制动性能事件。如果识别出制动性能事件,则控制系统20可以向操作者提供警报。
如图4所示,图4是制动性能80相对于制动接合随时间81的曲线图,控制系统20可以基于步进变化识别步进制动性能事件82和/或基于制动性能的变化率识别比率制动性能事件83。当制动性能高于最小制动性能阈值84时,可以识别步进和比率制动性能事件82、83,在最小制动性能阈值则以下向操作者提供警报。
系统10可以执行图5所示的方法85。在步骤86,控制系统20可以处理存储在存储器22上的制动性能数据。控制系统20可以包括与至少2个、至少5个、至少10个、至少100个或至少1000个制动接合相关的制动性能数据。制动性能数据可以与在机器11在已知条件下操作的主动测试期间的制动接合有关(例如,验证地类型测试)。可替代地或另外地,制动性能数据可以与机器11的正常操作期间的制动接合相关,并且可以考虑如上所述的拖曳力、滚动阻力和/或风阻损失。
在步骤87,控制系统20可以在制动性能数据中识别至少一个步进和/或速率制动性能事件82、83。该步进制动性能事件82可以由控制系统20基于至少两个制动接合之间的制动性能的步进变化以及超过固定步进变化阈值的步进变化幅度来识别。比率制动性能事件83可以由控制系统20基于超过变化率阈值的至少两个制动接合之间的制动性能的变化率来识别。
固定步进变化阈值和/或固定变化率阈值可以存储在存储器22中,并且可以指示步进变化幅度或变化率幅度,超过该步进变化幅度或变化率幅度,可能已经发生制动系统18的问题。变化率阈值可以包括固定变化率阈值。变化率阈值可以是基于在制动性能事件之前的制动接合期间的制动性能变化率的过去变化率阈值。例如,过去变化率阈值可以是在多个先前制动接合上的制动性能的平均变化率,诸如至少10个先前制动接合、至少100个先前制动接合和至少1000个先前制动接合。
在步骤88,控制系统20可以响应于检测到至少一个制动性能事件而向操作者提供警报。控制系统20因此可以在制动性能下降到最小制动性能阈值84以下之前识别与制动系统18有关的问题。
控制系统20还可以通过确定制动系统18的制动延迟来监测制动性能。制动延迟可以是系统10在操作者指示机器11接合制动系统18与制动系统18接合以使机器11减速之间的响应。
图6示出了示出机器速度90相对于距离91的曲线图,其中机器速度90在由操作者提供指示机器11的输入的第一时间实例93与制动系统18接合的第二时间实例94之间保持在常数92。机器11随后在第三时间实例96减速95至停止。制动延迟可以是第一和第二时间实例93、94之间的时间段,并且制动延迟对制动性能的影响可以是在制动延迟期间机器11行进的距离97。控制系统20可以确定制动延迟并且可以在制动延迟基本上影响制动性能时提供警报,诸如行进距离超过阈值距离和/或制动延迟超过制动延迟阈值。
系统10因此可以执行图7所示的方法100。在步骤101,控制系统20可以经由制动输入传感器33检测指示操作者经由制动输入30指示机器11减速的输入。输入可以是制动踏板的致动并且输入可以基于来自制动踏板位置传感器的输出来检测。在步骤102,控制系统20可以操作制动系统18,或者制动输入30可以直接操作制动系统18,以响应于该输入而接合制动系统18并由此开始制动接合。在步骤103,控制系统20可以响应于输入检测制动系统18的接合。制动系统18的接合可以基于来自至少一个车轮速度传感器35的输出来检测,诸如通过来自至少一个车轮速度传感器35的指示已经开始车轮速度减小的输出来检测。还可以基于来自制动系统压力传感器34的输出来检测制动接合,该制动系统压力传感器位于制动系统18中的至少一个车轮14处或附近,诸如在致动制动卡钳或活塞的流体中,用于检测由制动系统18对至少一个车轮14进行减速的施加。
在步骤104,控制系统20可以将制动延迟计算为检测到输入与检测到制动系统18的接合(例如,接合的开始)之间的时间段。制动延迟可以基于控制器21内的时钟来检测。在步骤105,控制系统20可以将制动延迟作为制动性能数据存储在存储器22上,该制动性能数据可以是除了如上所述确定的制动性能数据之外的制动性能数据。
在步骤106,控制系统20可基于制动延迟操作机器11。控制系统20可以基于制动延迟超过指示制动系统18和/或控制系统20的问题的制动延迟阈值来向操作者提供警报。控制系统20还可以利用与制动接合相关联的制动性能数据来处理制动延迟,并且将制动系统18的制动性能问题识别为与引起制动延迟的部件相关。例如,如果制动性能下降到阈值以下,并且制动延迟超过制动延迟阈值,则控制系统20可以确定制动系统18的制动性能问题与引起制动延迟的至少一个部件有关。
在本发明的一些方面中,基于预测减速度确定制动性能可以包括拒绝与制动接合相关联的生成的制动性能数据或者阻止与制动接合相关联的制动性能数据的产生。
在本发明的一些方面,确定制动性能可以在多个制动接合期间发生。
在本发明的一些方面,拒绝生成的制动性能数据可以包括拒绝发生拒绝条件的制动接合的所有制动性能数据,使得其不被处理用于与未来或进行中的制动性能相关的计算(即,将其从通过多个制动接合的制动性能的计算中排除)。另外地或可选地,排除制动性能数据可以包括防止生成用于制动接合的制动性能数据。
在本发明的一些方面中,制动性能数据可以包括使用预测减速度计算的制动性能。在任何实施方案中,确定制动性能可以包括在制动接合期间检测机器的实际减速度,并基于实际减速度和预测减速度确定制动性能。
在本发明的一些方面中,机器可以是被配置成承载重负荷的车辆,例如适合于运输采矿或采石材料的材料承载车辆。
在一些实施方案中,监测机器的制动系统的性能可以包括制动测试步骤,其中将机器移动到制动检查位置并且执行制动测试。制动测试可以包括在制动检查位置处进行的至少一个制动接合。制动测试步骤可以包括确定用于在制动检查位置处执行的制动接合或多个制动接合的制动性能。可以将一个或多个制动接合期间的制动性能与制动测试位置处的已知最佳制动性能进行比较。最佳制动性能可以通过在类似位置处的测试、建模和/或实验来确定。
在制动测试期间机器将在制动测试位置处行进的表面的表面条件可以是已知的。表面条件可以包括表面的拖曳或摩擦特性、表面的倾角等。用于制动检查位置的表面条件可以由控制系统存储或以其他方式可由控制系统访问。在制动测试位置处的表面可以被配置成提供用于制动的优化条件。
制动测试步骤可以包括当机器以指定速度和/或使用指定制动力行进时接合这些制动器。控制系统可以被配置成用于自动地执行制动测试步骤。制动测试步骤可以根据时间表来进行,例如在预定次数的制动接合之后或在从前一次测试或维护事件开始的预定经过时间之后。
在一些实施例中,机器可包括自动车辆/机器。
在一些实施方案中,机器可以是多个机器中的第一机器,并且该方法可以进一步包括第一机器与多个机器中的一个或多个其他机器共享与在指定位置(例如制动测试位置)处的寄生损失相关的数据。
因此,当确定制动系统18的制动性能时,方法50可以考虑滚动阻力和风阻损失。因此,制动性能数据可以是制动系统18的状态的更准确的表示,从而导致更准确的维修和更早的制动性能问题的识别。如果机器11是非公路机器,其可能由于地形15的类型(例如土壤,沙子等)的变化而遇到更高的滚动阻力并且由于使用更重的油而遇到更高的风阻损失,则制动性能数据的准确性可以被特别地改善。
方法50因此可以考虑在制动接合期间是否发生打滑,滚动阻力是否超过滚动阻力阈值和/或风阻损失是否超过风阻损失阈值。这样的事件可能导致相关联的制动性能数据不可靠。控制系统20可以通过拒绝不具有这种不可靠数据的制动性能评估。因此,用于多个制动接合的制动性能数据可以更可靠,并且通过从测试数据中排除这种不可靠的数据,制动图可以是用于确定预测减速度的更准确的基础。
长期趋势分析的方法85可以使得能够使用制动性能数据作为预测而不是仅用于确定维护间隔。特别地,当制动性能高于最小制动性能阈值84时,制动性能问题仍然可能发生。除了最小制动性能阈值84之外,制动性能事件82、83的识别可以提供用于识别制动性能问题的另外的手段。
从正在进行的制动性能计算中排除发生拒绝条件的制动接合的制动性能数据,通过拒绝或阻止制动接合的制动性能数据的生成,可以降低正在进行的制动性能计算的处理要求。
确定制动延迟的方法100可以产生可以用于进一步分析制动性能的任何降低的制动性能数据。因此,控制系统20和操作者可以使用制动性能数据来识别制动性能降低的可能原因。
本发明的方法可以包括使用测量的倾角数据(涉及表面或机器表面的倾角)来计算损失。这对于倾斜数据的计算可能是优选的,因为这样的计算可能受到其他变量的影响。
本发明的方法可以特别用于被配置成运输大量重质材料的车辆中,例如用于采矿和采石的车辆。在这种大型车辆中,车轴的风阻损失可能很大并且可能很大程度上取决于油温。这可以与具有较小车轴并且损失较少地取决于油温的较小车辆(例如汽车)相反。
- 监测机器的制动性能
- 监测机器的制动性能