一种煤矿用救援车载钻机井口拧卸装置及电控系统
文献发布时间:2023-06-19 12:10:19
技术领域
本发明属于矿用自动拧卸装置领域,具体涉及一种煤矿用救援车载钻机井口拧卸装置及电控系统。
背景技术
目前我国煤炭开采过程中伴随煤矿事故的发生,事故发生后作业矿工被困井下,安全通道被堵塞,救援人员又无法靠近灾区,被困人员面临生命危险。为了尽快营救出被困矿工,普遍采用精准小直径钻孔输送给养和大直径钻孔来构建逃生通道进行转运的方式来营救被困矿工。目前针对大直径钻具的拧卸装置整体普遍存在问题为结构尺寸偏大,卸扣能力弱、拧卸困难,无法满足多种规格钻具拧卸任务和传统钻进、液压吊卡钻进两种工艺要求。钻具装卸的效率影响整体下放钻具的时间,为了达到快速拧卸钻具,节省救援时间,设计一种满足上述要求的拧卸装置具有十分重要的意义。
发明内容
本发明提供了一种煤矿用救援车载钻机井口拧卸装置及控制系统,该拧卸装置具有拧卸钳整体宽度小,上卸扣直径范围大,卸扣能力大,拆装便捷。
为达到上述目的,本发明采取如下的技术方案:
一种煤矿用救援车载钻机井口拧卸装置,设置拧卸钳,所述的拧卸钳由同轴叠设的夹紧钳和卸扣钳组成,通过周向相对转动的夹紧钳和卸扣钳进行钻杆的拧卸;沿轴向平行,还设置搓扣钳,搓扣钳对卸扣后的钻杆进行连续搓扣。
可选的,还设置移动架总成,所述的移动架总成包括沿y轴方向设置的垂直架,沿x轴方向设置的水平架,垂直架沿水平架移动;所述的垂直架上移动设置调控架,调控架下安装拧卸钳,调控架上安装搓扣钳。
可选的,所述的搓扣钳与调控架间还设置一级移动组件;一级移动组件包括一级水平导轨,一级水平导轨上安装一级移动架,一级移动架通过一级水平移动油缸拉动,搓扣钳设置在一级移动架上。
可选的,搓扣钳和一级移动架间还设置浮动件。
可选的,所述的垂直架上沿y向设置升降筒总成;调控架安装在升降筒总成上,并通过升降油缸控制。
可选的,所述的搓扣钳设置第一夹紧臂和第二夹紧臂,第一夹紧臂和第二夹紧臂于一端分别铰接第一连杆和第一夹紧油缸形成夹爪式结构;第一夹紧臂和第二夹紧臂于另一端设置马达夹爪,马达夹爪与第一连杆间铰接第二连杆。
可选的,所述的夹紧钳与卸扣钳通过第一导轨和第二导轨沿叠设面嵌合;连接夹紧钳与卸扣钳设置卸扣油缸。
可选的,所述的夹紧钳设置第一曲柄和第二曲柄,第一曲柄和第二曲柄于一端分别铰接第二夹紧油缸和曲柄连接架形成夹爪式结构,第一曲柄和第二曲柄于另一端铰接夹紧块,夹紧块上沿轴向偏心方向设置卡瓦;在曲柄连接架上的中心位设置第一对中销轴。
一种煤矿用救援车载钻机井口拧卸装置,设置移动架总成,包括沿y轴方向设置的垂直架,沿x轴方向设置的水平架,垂直架沿水平架移动;由下到上,垂直架上同轴移动设置拧卸钳组件和搓扣钳组件,拧卸钳组件进行钻杆的卸扣,搓扣钳组件对卸扣后的钻杆进行连续搓扣;搓扣钳组件相对于拧卸钳组件进行水平移动。
一种煤矿用救援车载钻机井口拧卸装置的电控系统,设置电控箱和无线发送器;电控箱内与电源连接设置非安电源和本安电源,电控箱外设有传感器组和电比例阀组,电控箱内还设置隔离栅和移动车辆控制器;传感器组的输入信号经过隔离栅隔离后输入到移动车辆控制器进行采集,移动车辆控制器输出信号控制电比例阀组;电控箱由外部AC127V供电,本安电源和非安电源分别输出本安12V和非安24V;电控箱内还设置无线接收器,无线接收器的天线设置在电控箱外。
本发明与现有技术相比,有益的技术效果是:
三自由度双给进移动架,一级、二级移动架可独立水平移动,移开孔口,满足双壁钻具气盒子的通过性要求;搓扣钳、拧卸钳可沿竖直导轨上、下移动,进行寻找钻具接缝;搓扣钳的左前臂、右前臂采用同步连杆设计,确保左、右前臂同步运动,可靠夹紧钻具。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
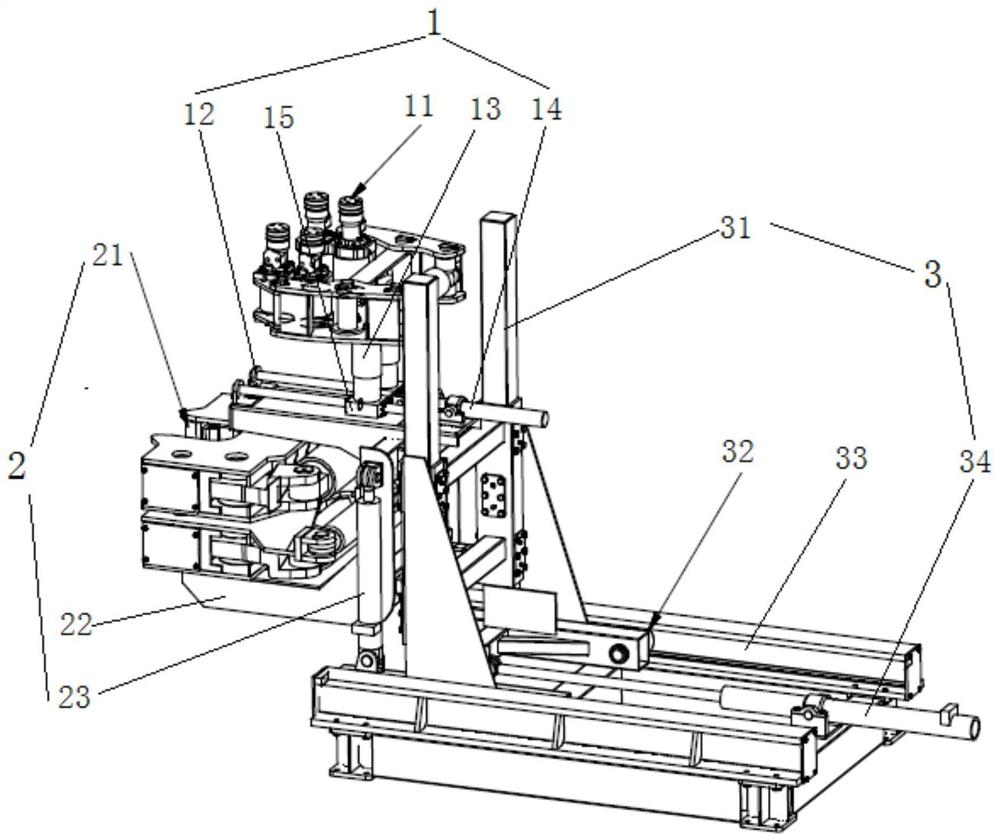
图1为本发明的煤矿用救援车载钻机井口拧卸装置立体结构示意图;
图2为本发明的搓扣钳组件结构俯视图;
图3为本发明的移动架总成左视图;
图4为本发明的拧卸钳组件左视图;
图5为图4的俯视图;
图6为图5中卡瓦结构安装图;
图7为本发明的煤矿用救援车载钻机井口拧卸装置电控系统图;
上述图中各标号表示为:
1-搓扣钳组件、11-搓扣钳、111-第一夹紧油缸、112-第一夹紧臂、113-第二夹紧臂、114-第一连杆、115-第二连杆、116-马达夹爪、12-一级水平导轨、13-浮动件、14-一级水平移动油缸、15-一级移动架;
2-拧卸钳组件、21-拧卸钳、211-夹紧钳、2111-第一对中销轴、2112-第二夹紧油缸、2113-第一曲柄、2114-第二曲柄、2115-曲柄销轴、2116-夹紧块销轴、2117-夹紧块、2118-卡瓦、2119-曲柄连接架、212-卸扣钳、2121-第二对中销轴、213-第一导轨、214-第二导轨、215-卸扣臂、216-卸扣油缸销轴、217-卸扣油缸、22-调控架、23-升降油缸;
3-移动架总成、31-垂直架、32-二级移动架、33-二级水平导轨、34-二级水平移动油缸、35-升降筒总成。
具体实施方式
以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本申请技术方案基础上做的等同变换均落入本发明的保护范围。
在本公开中,提到“轴向”等方位词,均指的是对于待拧卸的钻杆的轴向而言,其他方位词,“上、下、左、右、前、后、顶、底”等,均指的是面对附图时的方位;“水平”“垂直”也指的是面对附图时的地平面方向和与地平面方向垂直的方向。
结合图1-6,本发明的煤矿用救援车载钻机井口拧卸装置主要包括搓扣钳组件1、拧卸钳组件2和移动架总成3,移动架总成3包括沿y轴方向设置的垂直架31,沿x轴方向设置的水平架,垂直架31沿水平架移动;水平架包括水平方向设置的二级水平导轨33,二级水平导轨33上设置二级移动架32,并通过二级水平移动油缸34带动二级移动架32在二级水平导轨33上移动,上述结构形成了本装置整体的第二个水平移动自由度;由下到上,垂直架31上同轴移动设置拧卸钳组件2和搓扣钳组件1,拧卸钳组件2进行钻杆的卸扣,搓扣钳组件1对卸扣后的钻杆进行连续搓扣;搓扣钳组件1相对于拧卸钳组件2进行水平移动。
更加具体的方案,拧卸钳组件2设置拧卸钳21,拧卸钳21由同轴叠设的夹紧钳211和卸扣钳212组成,通过周向相对转动的夹紧钳211和卸扣钳212进行钻杆的拧卸(包括上扣和卸扣);沿轴向平行,还设置搓扣钳11,搓扣钳11对卸扣后的钻杆进行连续搓扣;垂直架31上移动设置调控架22,调控架22下安装拧卸钳21,调控架22上安装搓扣钳11;煤矿用救援车载钻机井口自动化拧卸装置,采用三自由度双给进移动架形式,搓扣钳11在一级水平移动油缸14的作用下可以独立沿着一级移动架15水平移动,搓扣钳组件1和拧卸钳组件2共同安装于调控架22上,C型架在二级水平移动油缸34的作用下与二级移动架32一起可以沿着二级水平导轨33水平移动,调控架22在升降油缸23的作用下可实现垂直移动。
搓扣钳组件1由一级移动组件和搓扣钳11组成,搓扣钳设置第一夹紧臂112和第二夹紧臂113,第一夹紧臂112和第二夹紧臂113于一端分别铰接第一连杆114和第一夹紧油缸111形成夹爪式结构;第一夹紧臂112和第二夹紧臂113于另一端设置马达夹爪116,马达夹爪116与第一连杆114间铰接第二连杆115。搓扣钳11采用剪刀式开口结构,第一夹紧臂112和第二夹紧臂113通过第一夹紧油缸111夹紧,马达夹爪116分别安装于第一夹紧臂112和第二夹紧臂113端部,带动滚子滑块实现连续搓扣动作,搓扣钳11夹紧与张开时由第二连杆115构成的平行四边形保证左右两个前臂同时向中心平行运动。搓扣钳11通过套筒安装于一级移动架15的拖板上,套筒内置浮动弹簧形成浮动件13,搓扣钳11保持在浮动状态,在钻具拧卸过程中,补偿钻具旋扣时的垂直位移,卸扣完毕后通过浮动弹簧的弹力复位;搓扣钳11采用液压缸夹紧、4个摆线马达带动滚子滑块实现旋扣动作。第一夹紧臂112和第二夹紧臂113之间安装同步连杆(第二连杆115),确保第一夹紧臂112和第二夹紧臂113同步向中心孔运动。
拧卸钳组件2包括拧卸钳21、调控架22和升降油缸23,拧卸钳21由上钳(夹紧钳211)和下钳(卸扣钳212)组成,分别通过两个油缸驱动“V”形滑块夹紧钻具接头,卸扣缸驱动上钳旋转完成钻具上扣和卸扣。夹紧钳211与卸扣钳212通过第一导轨213和第二导轨214沿叠设面嵌合;连接夹紧钳211与卸扣钳212设置卸扣油缸217。夹紧钳211设置第一曲柄2113和第二曲柄2114,第一曲柄2113和第二曲柄2114于一端分别铰接第二夹紧油缸2112和曲柄连接架2119形成夹爪式结构,第一曲柄2113和第二曲柄2114于另一端铰接夹紧块2117,夹紧块2117上沿偏心方向设置卡瓦2118;在曲柄连接架2119上的中心位设置第一对中销轴2111。第二夹紧油缸2112通过销轴驱动第一曲柄2113和第二曲柄2114带动曲柄连接架2119绕着曲柄销轴2115和夹紧块销轴2116转动,夹紧块2117通过夹紧块销轴2116固定在壳体中,同时夹紧块2117上沿偏心方向设置卡瓦2118;夹紧钳211、卸扣钳212的卡瓦2118安装采用偏心安装方式,在钻具拧卸的过程中,卡瓦2118可沿偏心卡瓦座转动,卡瓦在钻具磨擦力的作用下,卡瓦夹紧力与卡瓦的转角成正比例关系。卡瓦自转中心与卡瓦座几何中心不同心,向上偏移一定距离,卡瓦在钻具转动过程中,因磨擦力的存在,卡瓦沿自转中心旋转一定的角度,同时卡瓦外边缘(长半径)方向与卡瓦座下沿保持贴合。四组卡瓦间的间距随着转动的增加,距离不断变小,增强夹持力。
卸扣油缸217采用磁致伸缩油缸,内置磁致伸缩传感器,油缸活塞杆位置可通过磁致伸缩传感器检测。卸扣油缸217两端通过销轴与左、右两侧油缸耳坐连接,左油缸耳坐与夹紧钳壳体211连接,右油缸耳坐与卸扣钳212壳体连接。夹紧钳211的壳体下表面固设第一导轨213,卸扣钳212上表面固设第二导轨214,第一导轨213和第二导轨214均为半圆形的导轨,两者通过插接的形式嵌合,通过卸扣油缸217的轴向伸缩,实现夹紧钳211与卸扣钳212两者沿第一导轨213和第二导轨214相对转动,从而实现钻杆的卸扣操作。第一对中销轴2111和第二对中销轴2121可以实现两个钳体的快速对中;
移动架总成3为三自由度双给进移动架是拧卸钳组件2与搓扣钳组件1的基座,可实现拧卸钳组件2与搓扣钳组件1的水平、垂直移动,用于对中钻具,可承受搓扣钳11的反扭矩。三自由度双给进移动架采用双导轨形式:一级导轨处于最底层,采用滚动磨擦副实现C型架的水平移动;二级导轨处于最上层,导轨安装于C型架的上表面,采用滑动摩擦副方式,满足连续搓扣钳的水平移动。三自由度双给进移动架中的C型架通过升降筒固定,升降筒双侧安装升降油缸,升降油缸带动C型架沿一级垂直导轨垂直移动,实现拧卸钳和连续搓扣钳整体垂直移动。调控架22通过销轴连接在连接在升降筒总成35上,升降筒总成35采用滑动磨擦方式,升降筒总成35内侧安装自润滑板式滑动轴承,升降筒总成35安装在垂直架31上,升降筒在升降油缸23的作用下可沿着整体上下移动,实现对钻具接缝的精确定位。
本发明还提供了一种煤矿用救援车载钻机井口拧卸装置的电气、液压、远程智能控制方法,具体包括以下以下方法:
A:电气控制方法:
该装置附近设置有电控箱,内部包括本安电源、非安电源、隔离栅、移动车辆控制器、无线接收器等,电控箱外部通过喇叭口连接有传感器组和电比例阀组。传感器组包括接近开关、磁致位移传感器和压力变送器,为了满足煤矿防爆要求,传感器输入信号需要经过隔离栅隔离后才能输入到移动车辆控制器进行采集。电控箱由外部AC127V供电,本安电源和非安电源分别输出本安12V和非安24V。隔离栅安全侧用非安电源供电,危险侧用本安电源供电。传感器组的信号经过隔离器输入到移动车辆控制器进行采集,再经过一些算法控制输出脉冲宽度调制信号(PWM)给相应的电比例阀组,从而控制下钳夹紧、上钳夹紧、卸扣油缸卸扣等液压缸内的油液压力,进而实现对各液压缸的伸缩控制。
B:远程遥控方法:
系统设置有无线发送器和无线接收器。发送器采用可充电电池供电,操作面板上设置的钮子开关、按钮、摇杆和电位器等可以实现操控,还设置有指示灯可显示无线电信号强弱、电量状态以及系统故障状态。为了增强信号强度,将接收器的天线通过喇叭口引出放置在电控箱外部,通过在远程操作发送器的面板,操作指令变为无线信号发送到电控箱内的无线接收机,无线接收机再转换为CAN信号给移动车辆控制器,移动车辆控制器通过CAN报文的解析,并结合采集到油缸的磁致伸缩位移传感器,控制相应的电比例阀工作,从而控制前升降油缸组和后升降油缸组的伸缩。
图7电气控制原理图,整个控制系统具备手动控制和自动程序控制两种模式,传输方式为无线传输,通过无线发送器的主控制器可以实现对远程操控电控箱控制,从而实现对电液比例阀、油缸以及马达的精确控制;装置附近设置有无线发送器和电控箱,电控箱内部包括本安电源、非安电源、隔离栅、移动车辆控制器、无线接收器等,电控箱外部通过喇叭口连接有传感器组和电比例阀组。传感器组包括接近开关、磁致位移传感器和压力变送器等,为了满足煤矿防爆要求,传感器组的输入信号需要经过隔离栅隔离后才能输入到移动车辆控制器进行采集。电控箱由外部AC127V供电,本安电源和非安电源分别输出本安12V和非安24V。隔离栅安全侧用非安电源供电,危险侧用本安电源供电。传感器组的信号经过隔离器输入到移动车辆控制器进行采集,输出脉冲宽度调制信号(PWM)给相应的电比例阀组,从而控制卸扣钳夹紧、卸扣油缸拧卸等液压缸内的油液压力,进而实现对各液压缸的伸缩控制。
远程控制系统设置有无线发送器和无线接收器。无线发送器采用可充电电池供电,无线发送器面板上设置的钮子开关、按钮、摇杆和电位器等可以实现操控,还设置有指示灯可显示无线电信号强弱、电量状态以及系统故障状态。为了增强信号强度,将无线接收器的天线通过喇叭口引出放置在电控箱外部,通过在远程操作发送器的面板,操作指令变为无线信号发送到电控箱内的无线接收器,无线接收机再转换为CAN信号给移动车辆控制器,移动车辆控制器通过CAN报文的解析,并结合采集到油缸的磁致伸缩位移传感器,控制相应的电比例阀工作,从而无线接收器能通过CAN总线接收所述磁滞位移传感器检测到的油缸状态信息,磁滞位移传感器将油缸状态信息通过电流模拟量输入端口将PWM驱动控制输出,驱动隔爆比例电磁阀动作,控制前升降油缸组的伸缩。
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
- 一种煤矿用救援车载钻机井口拧卸装置及电控系统
- 一种石油钻机上用的井口上卸扣装置