一种基于电磁信号和图像信息的智能化移动终端
文献发布时间:2023-06-19 12:24:27
技术领域
本发明涉及自动控制领域,具体是一种基于电磁信号和图像信息的智能化移动终端。
背景技术
电磁波是由同相且互相垂直的电场与磁场在空间中衍生发射的震荡粒子波,是以波动的形式传播的电磁场,具有波粒二象性。由同向振荡且互相垂直的电场与磁场在空间中以波的形式移动,其传播方向垂直于电场与磁场构成的平面。电磁波在真空中速率固定,速度为光速,电磁波不依靠介质传播。当其能阶跃迁过辐射临界点,便以光的形式向外辐射,此阶段波体为光子,太阳光是电磁波的一种可见的辐射形态。
机器视觉系统是通过机器视觉产品(即图像摄取装置,分 CMOS 和 CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
目前在高速上,当驾驶员疲劳驾驶时,极有可能会发生车辆无意识偏离所在车道的情况,在车辆行驶中意外压到车道标线。当驾驶员意识到车辆偏离既定路线时,往往为时已晚,要么发生碰撞,要么就是急打方向盘进行反向纠正,最终造成侧翻。
上述困境长期困扰着国内外交通安全,即司机无法实时全程确保车辆按照规定路线准确行驶。因此,利用电磁技术及机器视觉技术,实时监测车辆实际行驶路线和车道线之间的偏离程度,大于提前预设阈值时自动纠偏,兼顾即时性、准确性和敏感性,将有助于提高交通安全性。
发明内容
本发明的目的在于提供一种基于电磁信号和图像信息的智能化移动终端,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:
一种基于电磁信号和图像信息的智能化移动终端,包括:
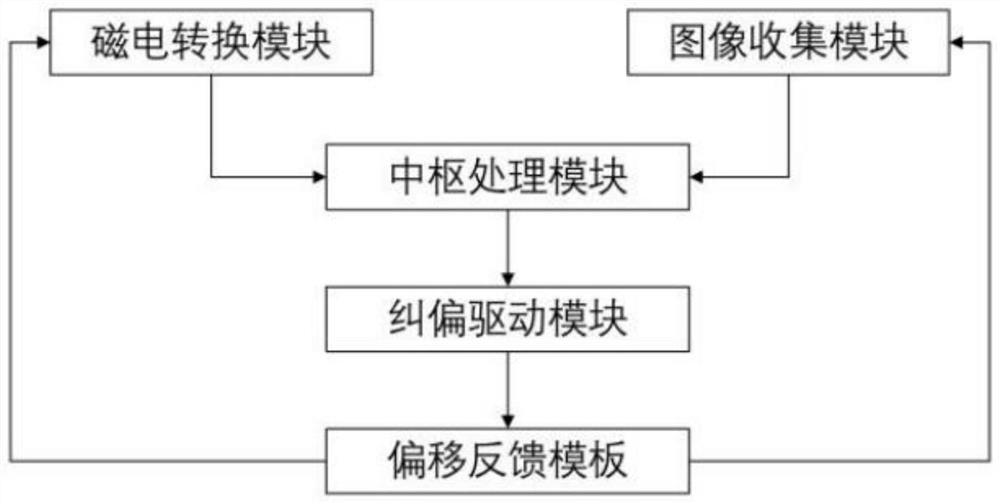
磁电转换模块,用于完成对电磁信号的接收和转换;将该电磁信号输出给中央处理模块;
图像收集模块,用于内部单目摄像头获取实时路面影像信息并进行像素距离计算,得到偏移量的辅助参考值;将该辅助参考数据输出给中央处理模块;
中枢处理模块,用于利用设定好的 K60 芯片完成偏移量的双重计算及阈值对比,实时判断是否需要进行自主纠偏;需要纠偏时输出信号给纠偏驱动模块;
纠偏驱动模块,用于接收中枢处理模块纠偏信号后,控制转叶式舵机工作,驱动移动终端前轮行驶,完成自主纠偏全过程;
偏移反馈模板,用于实时计算纠偏后偏移量判断是否需要再次纠偏,需要再次纠偏时,输出信号给磁电转换模块和图像收集模块。
作为本发明再进一步的方案:电磁信号模拟器需配合铜线使用,铜线连续铺设在道路双黄线路面以下20cm处。
作为本发明再进一步的方案:磁电转换模块根据电磁信号强弱变化判断路线是否偏移及计算偏移量。
作为本发明再进一步的方案:图像收集模块计算图像像素点之间的距离作为偏移量辅助判断。
作为本发明再进一步的方案:图像收集模块采用模板匹配的方式识别特定的车辆、路线及车道,通过对比图像的像素值来检测目标。
作为本发明再进一步的方案:所述图像收集模块对拍照的图像进行辨别处理以及定位处理,通过蓝牙接口将信号传给中枢处理模块。
作为本发明再进一步的方案:各个模块之间的通信协议包括集成电路总线、异步收发传输器及蓝牙通信协议。
作为本发明再进一步的方案:磁电转化模块包括磁电转换装置,集成在 PCB 线路板内,并使用塑料外壳进行封装。以免污染或漏电意外发生。
作为本发明再进一步的方案:单目相机采用 CMOS 摄像头器件,即彩色 CMOS 型图像采集集成芯片,可提供高性能的单一小体积封装,分辨率可以达到 640X480,传输速率可以达到 30 帧。
与现有技术相比,本发明的有益效果是:本发明采用电磁信息和计算机视觉对车辆行驶过程中的偏移情况进行检测、计算和纠正,能够使司机在驾驶该车辆时,仅需启动车辆便可自主完成行驶纠偏,从而辅助司机驾驶,可突破现有司机的能力限制,更加准确和安全,兼顾即时性、准确性和敏感性,极大的提高了司机的驾驶安全性,相对于现有车辆行驶模式,具有准确性高、安全性高等优点。
附图说明
图1为一种基于电磁信号和图像信息的智能化移动终端结构示意图。
图2为一种基于电磁信号和图像信息的智能化移动终端工作流程图。
图3为一种基于电磁信号和图像信息的智能化移动终端的单目摄像头图像采集及处理结构示意图。
图4为一种基于电磁信号和图像信息的智能化移动终端的电磁信号转换原理示意图。
图中:1-线圈、2-铁芯、3-霍尔元件。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1,请参阅图1,一种基于电磁信号和图像信息的智能化移动终端,包括:
磁电转换模块,用于完成对电磁信号的接收和转换;将该电磁信号输出给中央处理模块;
图像收集模块,用于内部单目摄像头获取实时路面影像信息并进行像素距离计算,得到偏移量的辅助参考值;将该辅助参考数据输出给中央处理模块;
中枢处理模块,用于利用设定好的 K60 芯片完成偏移量的双重计算及阈值对比,实时判断是否需要进行自主纠偏;需要纠偏时输出信号给纠偏驱动模块;
纠偏驱动模块,用于接收中枢处理模块纠偏信号后,控制转叶式舵机工作,驱动移动终端前轮行驶,完成自主纠偏全过程;
偏移反馈模板,用于实时计算纠偏后偏移量判断是否需要再次纠偏,需要再次纠偏时,输出信号给磁电转换模块和图像收集模块。
在本实施例中,利用预设频率的电磁信号、单目摄像头及 K60 芯片,能够使司机在驾驶过程中,无需人工格外判断及操作,便可自动测量路线—车道偏移量进行自主纠偏,从而辅助司机安全驾驶。K60芯片中采用脉冲宽度调制(PWM)利用微处理器的数字信号对模拟电路进行控制,输出一系列幅值相等的脉冲;并利用模拟数字转换器(ADC)模拟形式的连续信号转换为数字形式的离散信号,从而提供被控制对象的有关参数(如速度、压力、温度等);所使用的集成电路总线(IIC 总线)的器件分为主控器和被控器两大类,使得 cpu 可向不同功能模块电路发出自检信号,得到各功能模块电路正常反馈的数据信号后机器才进入正常工作状态;除此之外,异步收发传输器(UART)可用于异步双向通信。将要传输的资料在串行通信与并行通信之间加以转换,把并行输入信号转成串行输出信号,实现全双工传输和接收,可用于主机与辅助设备之间进行通信;同样蓝牙通信协议也作为一种通信方式被使用。
在另一个实施例中,请参阅图4,电磁信号模拟器需配合铜线使用,铜线连续铺设在道路双黄线路面以下20cm处。
在本实施例中,与磁电转化模块通过距离来判断车辆是否偏移,根据电磁信号强弱变化可判断路线—车道偏移量,即计算车辆左右端接收电磁强度β1 、β2与设定差阈值η1之间差的绝对值大小,若β1−β2−η1≥ε,则驱动舵机工作进行纠偏。
在另一个实施例中,请参阅图4,磁电转换模块根据电磁信号强弱变化判断路线是否偏移及计算偏移量。
在本实施例中,车辆前端设有磁电转换模块,完成对于道路预设电磁信号发送器发送电磁信号的接收。
在另一个实施例中,图像收集模块计算图像像素点之间的距离作为偏移量辅助判断。
在本实施例中,图像像素点之间的距离可作为偏移量辅助判断,自动检测出规定预设路线与车道之间的偏移量α,与预设偏移量阈值η2进行对比,若∝−η2 ≥ε,则驱动舵机工作进行纠偏。
在另一个实施例中,图像收集模块采用模板匹配的方式识别特定的车辆、路线及车道,通过对比图像的像素值来检测目标。
在本实施例中,以此保证使用该基于电磁信号和图像信息的智能化移动终端时出现车辆、路线、车道能够顺利录入。
在另一个实施例中,请参阅图3,所述图像收集模块对拍照的图像进行辨别处理以及定位处理,通过蓝牙接口将信号传给中枢处理模块。
在本实施例中,K60芯片作为信息处理中枢完成偏差量的计算,转叶式舵机接受信号后控制车辆前轮转动,完成自主纠偏;车辆自动时该系统自动开启进行路线纠偏,电磁信号接收后导入 K60 芯片进行偏移量计算,单目摄像头实时捕捉图像作为次要偏移量计算信息;
在另一个实施例中,各个模块之间的通信协议包括集成电路总线、异步收发传输器及蓝牙通信协议。
在本实施例中,通过集成电路总线、异步收发传输器及蓝牙通信协议等连接方式使得各个模块连接为一个整体。
在另一个实施例中,磁电转化模块包括磁电转换装置,集成在 PCB 线路板内,并使用塑料外壳进行封装。
在本实施例中,磁电转换装置进行隔离以免污染或漏电意外发生,加强该基于电磁信号和图像信息的智能化移动终端的安全性。
在另一个实施例中,单目相机采用 CMOS 摄像头器件,即彩色 CMOS 型图像采集集成芯片,可提供高性能的单一小体积封装,分辨率可以达到 640X480,传输速率可以达到30 帧。
在本实施例中,单目相机直接捕捉影像并通过数据带传到 K60 芯片中。
本发明的工作原理是:磁电转换模块通过车辆行驶于公路上,相对于铺设在道路双黄线路面以下20cm处的铜线左右移动,来产生电磁信号,将该电磁信号输出给中央处理模块;
图像收集模块对拍照的图像进行辨别处理以及定位处理,通过蓝牙接口将信号传给中枢处理模块;
图像收集模块采用模板匹配的方式识别特定的车辆(路线)及车道,通过对比图像的像素值来检测目标;
中枢处理模块包括有 A/D 转换器(ADC),可将模拟信号转化为数字信号,即将模拟信号进行采样,然后量化编码为二进制数字信号;
纠偏驱动模块具有灵敏的动态响应性能,其标准的响应位移精度较高;
偏移反馈模块将重复计算偏移量,直至偏移量与阈值绝对差小于ε时停止工作。
请参阅图2,一种基于电磁信号和图像信息的智能化移动终端,包括以下步骤:
S1、车辆行驶道路沿线需安设等距电磁信号模拟器作为电磁信号发射端;
S2、车辆前段布设磁—电转换装置,完成对于道路预设电磁信号发送器发送电磁信号的接收和转换;
S3、车辆头部架设已矫正单目相机,实时捕捉车辆行驶影像信息,主要内容包括车体移动路线及车道;
S4、通过数据带并基于多个通信协议,将电磁强度值和图像信息导入 K60芯片中进行计算判断;
S5、若判断结果为车辆偏移量大于阈值,芯片控制舵机工作,驱动车辆前轮行驶进行初次纠偏;
S6、初次纠偏后重复 S2~S4 步骤,再次进行偏移量计算及判断过程;
S7、重复 S2~S6 步骤,直至偏移量满足要求(≤ε)。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种基于电磁信号和图像信息的智能化移动终端
- 一种基于告警信息的图像画面智能化推送系统