锻炼装置
文献发布时间:2023-06-19 13:26:15
相关申请的交叉引用
本申请要求于2019年05月23日提交的美国临时申请第16/420,236号的权益。上述申请的全部的公开内容通过引用结合至本文中。
技术领域
本公开涉及一种锻炼装置。
背景技术
本部分提供与本公开有关的并且不一定是现有技术的背景信息。
锻炼装置可以用于锻炼人的身体的各种肌肉。这种锻炼装置可能难以使用并且制造昂贵。本公开的锻炼装置使用简单并且制造成本低廉。例如,本公开的锻炼装置还有效地锻炼人的身体,包括人的下身体部分(例如,小腿、大腿、小腹等)。
发明内容
本部分提供了本公开的总体概述,而不是其全部范围或所有特征的全面公开。
在一种形式中,本公开提供了一种锻炼装置,该锻炼装置包括鞋、柔性的长形构件和马达组件。柔性的长形构件在多个位置中的一个位置处被附接至鞋。马达组件设置在鞋与长形构件之间。马达组件配置为引起长形构件振荡(oscillate)。
在上一段落的锻炼装置的一些配置中,长形构件在一个位置处被附接至鞋,使得鞋和长形构件彼此平行地延伸。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,长形构件在一个位置处被附接至鞋,使得鞋和长形构件相对于彼此成角度。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,马达组件包括马达、以及连接至马达的多个振动构件(vibration member)。当马达处于关闭模式(OFF mode)时,振动构件与长形构件的顶部表面间隔开。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,振动构件被配置为当马达被转到开启模式(ON mode)时上下移动,这引起振动构件撞击长形构件的顶部表面,使得长形构件振荡。
在另一形式中,本公开提供了一种锻炼装置,该锻炼装置包括锻炼设备和处理器。该锻炼设备包括鞋、柔性的长形构件和马达组件。柔性的长形构件被配置为在多个位置中的一个位置处被附接至鞋。马达组件设置在鞋与长形构件之间。马达组件包括马达和连接至马达的振动构件。振动构件被配置为撞击长形构件,使得长形构件振荡。处理器被配置为执行存储在非暂时性计算机可读介质中的指令。这些指令包括:上传医学图像;将医学图像与存储在非暂时性计算机可读介质中的模板医学图像进行匹配,以获得治疗方案;生成指示多个位置中的哪一个位置来将柔性的长形构件附接至鞋的通知;以及,开始治疗方案,使得信号被发送至马达,该马达引起振动构件撞击长形构件并且使长形构件振荡。
在以上段落的锻炼装置的一些配置中,发送至马达的信号引起马达转到开启模式,所述开启模式在预定功率下持续预定持续时间。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,发送至马达的信号引起马达转到开启模式,所述开启模式持续预定持续时间。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,马达的功率在预定持续时间内变化。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,马达的功率是可调节的。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,当功率增加时,长形构件的振荡的幅度更大,以及当功率降低时,长形构件的振荡的幅度更小。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,当功率增加时,振动构件以更大的力撞击长形构件,以及当功率降低时,振动构件以更小的力撞击长形构件。
在以上段落中的任何一个或多个的锻炼装置的一些配置中,医学图像是下身体部分(lower body portion)的肌肉的医学图像。
在又一形式中,本公开提供了一种方法,该方法包括:上传医学图像;将医学图像与存储在非暂时性计算机可读介质中的模板医学图像进行匹配,以获得治疗方案;生成指示多个位置中的哪一个位置来将锻炼装置的柔性的长形构件连接至锻炼设备的鞋的通知;以及开始治疗方案,使得信号被发送至锻炼设备的马达,该马达引起锻炼设备的振动构件撞击长形构件并使长形构件振荡。
在以上段落的方法的一些配置中,发送至马达的信号引起马达转到开启模式,所述开启模式在预定功率下持续预定持续时间。
在以上段落中的任何一个或多个的方法的一些配置中,发送至马达的信号引起马达转到开启模式,所述开启模式持续预定持续时间。
在以上段落中的任何一个或多个的方法的一些配置中,马达的功率在预定持续时间内变化。
在以上段落中的任何一个或多个的方法的一些配置中,马达的功率是可调节的。
在以上段落中的任何一个或多个的方法的一些配置中,当功率增加时,长形构件的振荡的幅度更大,以及当功率降低时,长形构件的振荡的幅度更小。
在以上段落中的任何一个或多个的方法的一些配置中,当功率增加时,振动构件以更大的力撞击长形构件,以及当功率降低时,振动构件以更小的力撞击长形构件。
在以上段落中的任何一个或多个的方法的一些配置中,医学图像是下身体部分的肌肉的医学图像。
根据本文提供的描述,其他应用领域将变得显而易见。该发明内容中的描述和具体实施例仅旨在用于说明的目的,并不旨在限制本公开的范围。
附图说明
本文描述的附图仅用于所选实施方式的说明性目的,而不是所有可能的实现方式,并且不旨在限制本公开的范围。
图1a为人坐下并穿戴根据本公开的原理的锻炼装置的锻炼设备的立体图;
图1b为人坐下并穿戴锻炼装置的交替锻炼设备的立体图;
图2为图1a中锻炼装置的一种锻炼设备的分解图;
图3为图1a中锻炼装置的一种锻炼设备的仰视图;
图4为一种锻炼设备的截面视图;
图5为展示锻炼设备与计算设备之间的通信的框图;
图6为描述用于操作锻炼装置的锻炼设备的算法的流程图;
图7为人坐下并穿戴锻炼设备、以及一种锻炼设备的正振荡的长形构件的立体图;以及
图8为人仰卧并穿戴锻炼设备、以及锻炼设备的正振荡的两个长形构件的立体图。
在附图的若干视图,相应的附图标记指代相应的部件。
具体实施方式
现在将参考附图更全面地描述示例性实施方式。
提供了示例性实施方式,以使得本公开将是彻底的,并且将范围充分地传达给本领域技术人员。阐述了许多具体细节(例如具体部件、设备和方法的示例),以提供对本公开的实施方式的透彻理解。对于本领域的技术人员将是显而易见的是那些特定细节没有必要被采用,那些示例性实施方式可以以许多不同的形式来体现,而不应被理解为限制了本发明的范围。在一些示例性实施方式中,未详细描述公知的过程、公知的设备结构、以及公知的技术。
本文中使用的术语仅为了描述特定的示例性实施方式,且不旨在限制。如本文中所使用的,除非上下文另有明确指示,否则单数形式“一(a)”、“一个(an)”和“该(the)”可以旨在包括复数形式。术语“包含(comprises,comprising)”、“包括(including)”和“具有(having)”是包含性的,因此特指所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除存在或增加一个或多个其他特征、整数、步骤、操作、元件、部件和/或其组合。除非明确地标识为执行顺序,否则本文描述的方法步骤、过程和操作不应被解释为必须以所讨论或图示的特定顺序来执行。还应理解,可以采用附加或替代步骤。
当元件或层被称为“在另一元件或层上”,“接合至”、“连接至”或“耦合至”另一元件或层时,该元件或层可以直接在另一元件或层上,直接被接合、连接或耦合至另一元件或层,或者可以存在中间元件或层。相反,当元件被称为“直接在另一元件或层上”,“直接接合至”、“直接连接至”或“直接耦合至”另一元件或层时,则可能没有中间元件或层。用于描述元件之间的关系的其他词语应类似解释(例如,“在……之间”相对于“直接在……之间”,“邻近”相对于“直接邻近”等)。如本文所使用的,术语“和/或”包括相关联的所列项目中的一个或多个的任意组合和所有组合。
尽管术语“第一”、“第二”、“第三”等可以在本文中被用于描述不同元件、部件、区域、层和/或区段,除非另有说明,否则这些元件、部件、区域、层和/或区段应不应被这些术语限制。这些术语可以仅用将一个元件、部件、区域、层和/或区段与另一区域、层和/或区段区分开来。本文中使用时,除非上下文明确指出,否则诸如“第一”、“第二”和其他数字表示的术语并不暗指顺序或次序。因此,下面讨论的第一元件、第一部件、第一区域、第一层或第一区段可以被称为第二元件、第二部件、第二区域、第二层或第二区段,而不会背离示例性实施方式的教导。
为了便于描述,空间相对术语(例如“内部”、“外部”、“之下”、“下面”,“下方”,“之方”,“上面”等)可以在本文中用来描述附图中所示的一个元件或特征与另一个(另一些)元件或特征的关系。空间相对术语旨在涵盖除了附图中所描述的取向之外的设备在使用或操作中的不同取向。例如,如果图中的设备被翻转,则描述为在其他元件或特征“下方(below)”或“下面(beneath)”的元件将随后被定向为在其他元件或特征“上方(above)”。因此,示例性术语“下方(below)”可以涵盖上方和下方的取向。设备可以以其他方式定向(旋转90度或以其他取向定向),并且在本文中使用的空间相对描述词相应地进行解释。
如图1a中所示,提供了锻炼装置10。使用者12可以操作锻炼装置10进行锻炼。例如,锻炼装置10可以由使用者12操作以锻炼使用者12的下身体部分13,例如使用者的腿11(即,每条腿11包括小腿14、大腿16和脚17)以及例如小腹18。锻炼装置10可以包括一对锻炼设备20和计算设备22。
如图1至图4和图7中所示,每个锻炼设备20可以为彼此独立可操作的并且可以包括柔性的长形构件26和鞋28。长形构件26可以是平坦的并且可以包括相对端部。在一些配置中,长形构件26可以是弯曲的。在一些配置中,长形构件26可以是可伸缩的,使得长形构件26可以方便地包装和运输。在一些配置中,如图1b中所示,每个长形构件26的相对端部30可以包括附接至其上的重物31、以促进长形构件26的振荡。长形构件26可以在多个位置中的长形构件26的中间部分处可移除地附接至鞋28。
例如,如图3所示,长形构件26可以在第一位置中被附接至鞋28,在该第一位置中长形构件26和鞋28彼此平行(即,鞋28在平行于长形构件26的纵向轴线的方向上延伸)。在另一示例中,如图3中的虚线所示,长形构件26可以在第二位置中被附接至鞋28,在该第二位置中长形构件26相对于鞋28成角度(即,非平行角度)(即,长形构件26的一部分在鞋的前端处延伸超过鞋28的向内部分34,以及长形构件26的另一部分在鞋的后端处延伸超过鞋28的向外部分36)。应当理解的是,鞋28的向内部分34与鞋28的向外部分36相对并且鞋28的向内部分34面向另一只鞋28的向内部分34。在另一示例中,如图3中的虚线所示,长形构件26可以在第三位置中被附接至鞋28,该第三位置中长形构件26相对于鞋28成角度(即,非平行角度)(即,长形构件26的一部分在鞋的前端处延伸超过鞋28的向外部分36,以及长形构件26的另一部分在鞋的后端处延伸超过鞋28的向内部分34)。长形构件26被附接至鞋28的每个位置都针对下身体部分13的不同区域。
如图3所示,长形构件26可以通过紧固件38a、38b(例如,螺栓、螺钉等)附接至鞋28。鞋28可以包括在鞋28的前端处或在鞋28的前端附近的多个第一孔40(包括孔40a、孔40b和孔40(未示出))和在鞋28的后端处或在鞋28的后端附近的多个第二孔42(包括孔42a、孔42b和孔42(未示出))。紧固件38a可以延伸穿过长形构件26的孔(未示出)和鞋28的多个孔40之一、以将长形构件26附接至鞋28。类似地,紧固件38b可以延伸穿过长形构件26的孔(未示出)和鞋28的多个孔42之一、以进一步将长形构件26附接至鞋28。应当理解的是,孔40、42和长形构件26的孔可以是带螺纹的。
还应当理解的是,虽然长形构件26通过紧固件38a、38b附接至鞋28,但是长形构件26可以通过附接机构或任何其他合适的方式来附接至鞋28或使用者的脚。例如,锁定板(未示出)可以在多个位置中附接至长形构件26。鞋28可以通过例如带子(未示出)固定至锁定板,使得鞋28附接至长形构件26。使用者12的脚可以(通过开口50)插入鞋28,从而将使用者12的脚固定至鞋28。使用者12的脚也可以经由锁定板或任何其他附接机构(例如,带子)直接附接至长形构件26(即,没有鞋28)。
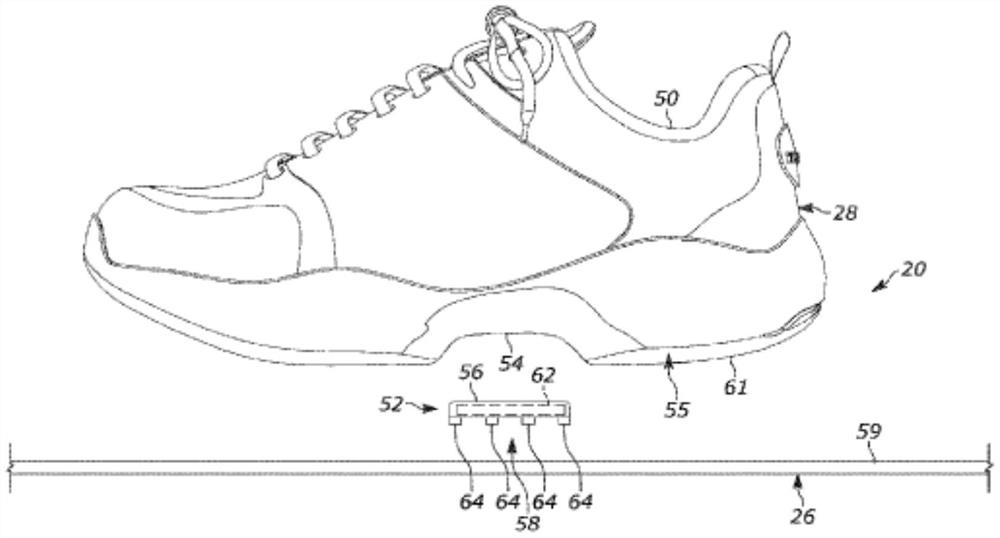
如图4所示,马达组件52可以设置在形成于鞋28的鞋底55中的腔体54中、并且可以包括马达壳体56和马达设备58。在一些配置中,马达组件52可以通过任何合适的方式(粘合剂、紧固件等)附接至长形构件26的顶部表面59或鞋28的鞋底55的底部表面61。马达壳体56可以邻近长形构件26的顶部表面59(即,马达壳体56可接触长形构件26的顶部表面59或可以与长形构件26的顶部表面59间隔开)。马达壳体56还可以容纳马达设备58。马达设备58可以包括马达62和振动构件64。例如,马达62可以是伺服马达。
振动构件64可以连接至马达62,使得当马达62处于关闭模式时,在振动构件64的端与长形构件26的顶部表面59之间存在间隙。振动构件64被配置为当马达62被转至开启模式时上下移动。这引起振动构件64撞击长形构件26的顶部表面59,使得长形构件26来回振荡(图7;长形构件26的端来回振荡)。由天然橡胶、合成橡胶或任何其他合适材料制成的帽(未示出)可以设置在振动构件64上、以在振动构件64反复撞击长形构件26时保护长形构件26。可以理解的是,马达62的功率是可调节的。以这种方式,当马达62的功率增加时,长形构件26的振荡的幅度更大,与马达62的功率降低时截然相反。换句话说,当马达62的功率增加时,振动构件64以更大的力撞击长形构件26,与马达62的功率降低时截然相反,进而引起长形构件26的振荡的幅度更大。
如图5中所示,计算设备22可以与一对锻炼设备20的马达组件52的马达62通信、并且可以包括处理器68,该处理器68被配置为执行存储在存储器单元70中的指令,所述指令可以是非暂时性计算机可读介质,例如随机存取存储器(random-access memory,RAM)和/或只读存储器(read-only memory,ROM)。例如,计算设备22可以是计算机、移动电话(例如,智能手机)或平板电脑,或任何其他通信设备或设备网络。计算设备22可以经由例如互联网、Wi-Fi、蓝牙
存储器单元70可以在其中存储模板图像。模板图像可以是例如在预定条件下(例如,轻度肌肉拉伤、严重肌肉挫伤)的肌肉的医学图像(例如,超声图像、磁共振成像(MRI)等)。每个模板图像可以与治疗方案相关联。例如,具有轻微拉伤的小腿肌肉的模板图像可能与一种治疗方案相关联。在另一示例中,具有轻度拉伤的小腹肌肉的模板图像可以与另一治疗方案相关联。
处理器68可以与存储器单元70通信、以将上传的图像与存储在存储器单元70中的相应模板图像相匹配。一旦上传的图像与相应的模板图像匹配,就获得了与模板图像相关联的治疗方案。基于治疗方案,计算设备22可以通知鞋28的使用者12穿上(即,左鞋或右鞋)并且通知鞋28的使用者12长形构件26应该附接至使用者12所穿的鞋28的位置。一旦使用者12穿上鞋28并且将长形构件26附接至使用者12所穿的鞋28上,使用者12就可以选择计算设备22上的控制以开始治疗方案,该控制继而向马达62发送信号以将马达62转到开启模式。基于治疗方案,发送至马达62的信号引起马达62开启,该开启在预定功率下持续预定持续时间。应当理解的是,在一些配置中,基于治疗方案,发送至马达62的信号引起马达62的功率在预定持续时间的过程中变化。例如,如果马达62要运行10分钟的预定持续时间,则马达62可以在第一功率下运行5分钟并且在第二功率下运行5分钟。
应当理解的是,在一些配置中,存储器单元70可以是远程的(例如,在云基础服务器中)并且可以在其中存储模板图像。在这样的配置中,计算设备22可以与远程存储器单元70通信,使得上传的图像可以与存储在存储器单元70中的相应模板图像相匹配,并且获得与相应模板图像相关联的治疗方案。
还应理解的是,如果上传的图像与存储器单元70中存储的任何模板图像都不匹配,则将基于存储器单元70中存储的模板图像为该上传的图像创建自定义治疗方案。例如,如果上传的图像接近存储在存储器单元70中的两个模板图像,则自定义治疗方案可以是与两个模板图像相关联的治疗方案的组合。
在一些配置中,如图8中所示,使用者12可以仰卧80,每条腿11都抬高至地表面84之上(即,每条腿11悬在空中且离开地表面84)。此时,在每个锻炼设备20的振动构件64引起相应的长形构件26振荡的情况下,使用者12可以交替地前后移动他们的腿11、以进一步恢复和/或锻炼他们的下身体部分13。在一些配置中,当马达62处于关闭模式并且腿11之一完全伸展时,使用者12可以将与伸展的腿11相关联的脚17前后移动,从而引起固定至脚17的长形构件26振荡,而不是振动构件64使长形构件26振荡。在一些配置中,使用者12可以仅将一条腿11前后移动,而不是两条腿11前后交替运动。
参考图6,示出了用于使锻炼设备20的长形构件26中的至少一个振荡以锻炼和/或恢复使用者12的下身体部分13的控制算法的示例性实施方式的流程图200。控制算法从204处开始。在208处,控制算法使用处理器68将使用者12的医学图像上传至计算设备22。
在212处,控制算法使用处理器68将上传的图像与存储在计算设备22的存储器单元70中的对应模板图像匹配,并获得与对应模板图像相关联的治疗方案。在216处,控制算法使用处理器68生成指示多个位置中的哪一个位置来将柔性的长形构件26附接至鞋28的通知。例如,长形构件26可以在第一位置中被附接至鞋28,在该第一位置中长形构件26和鞋28彼此平行(即,鞋28在平行于长形构件26的纵向轴线的方向上延伸)。在另一示例中,长形构件26可以在第二位置中被附接至鞋28,在该第二位置中长形构件26相对于鞋28成角度(即,非平行角度)(即,长形构件26的部分在鞋的前端处延伸超过鞋28的向内部分34,以及长形构件26的另一部分在鞋的后端处延伸超过鞋28的向外部分36)。
在220处,控制算法使用处理器68通知使用者12开始治疗方案。一旦使用者12开始治疗方案,计算设备22就向马达62发送信号、以将马达62转到开启模式。基于治疗方案,发送至马达62的信号引起马达62开启,该开启在预定功率下持续预定持续时间。在一些配置中,基于治疗方案,发送至马达62的信号引起马达62的功率在预定持续时间的过程中变化。例如,如果马达62要运行10分钟的预定持续时间,则马达62可以在第一功率下运行5分钟并且在第二功率下运行5分钟。马达62在开启模式时上下移动振动构件64,这引起长形构件26振荡(图7)。振荡的幅度取决于马达62运行的功率。例如,长形构件26的振荡锻炼和/或恢复使用者12的下身体部分13中的肌肉。然后控制算法进行至224并结束。
本公开的教导提供了允许使用者12在他或她的下身体部分13不运动的情况下锻炼和/或康复他或她的下身体部分13的益处。应当理解的是,在一些配置中,例如,使用者12可以手动上下移动他或她的腿、以引起长形构件26的振荡,从而锻炼和/或康复他或她的下身体部分13。本公开的教导还可以允许使用者12在家锻炼和/或康复,而不是在健身房或康复设施中锻炼和/或康复。本公开的教导还可以允许使用者12基于治疗方案(即,基于长形构件26附接至鞋28的位置并且基于马达62开启的持续时间和马达62设置的功率)来锻炼和/或康复他或她的下身体部分13的不同区域。
在包括以下定义的本公开中,术语“模块”可以用术语“电路”来代替。术语“模块”可以指代以下项、是以下项的一部分、或包括以下项:专用集成电路(ApplicationSpecific Integrated Circuit,ASIC);数字、模拟或混合模拟/数字离散电路(digital,analog,or mixed analog/digital discrete circuit);数字、模拟或混合模拟/数字集成电路(digital,analog,or mixed analog/digital integrated circuit);组合逻辑电路(combinational logic circuit);现场可编程门阵列(field programmable gate array,FPGA);执行代码的处理器电路(共享、专用或组);存储由处理器电路执行的代码的存储器电路(共享、专用或组);提供所描述功能的其他合适的硬件部件;或以上中的一些或全部的组合,例如在片上系统(system-on-chip)中。
模块可以包括一个或多个接口电路。在一些示例中,接口电路可以包括连接至局域网(LAN)、互联网、广域网(WAN)或它们的组合的有线或无线接口。本公开的任何给定模块的功能可以分布在经由接口电路连接的多个模块中。例如,多个模块可以允许负载平衡。在另一示例中,服务器(也称为远程或云)模块可以代表客户端模块完成某些功能。
本申请中描述的装置和方法可以通过由专用计算机来部分或完全地实现,该专用计算机是通过配置通用计算机以执行计算机程序中体现的一个或多个特定功能而创建的。上述的功能块和流程图元素用作软件规格说明,这些软件规格说明可以通过技术人员或程序员的例行工作而被转换为计算机程序。
计算机程序包括处理器可执行指令,所述处理器可执行指令存储在至少一种非暂时性的、有形的计算机可读介质上。计算机程序还可以包括或依赖于所存储的数据。计算机程序可以包括与专用计算机的硬件交互的基本输入/输出系统(BIOS)、与专用计算机的特定设备交互的设备驱动器、一个或多个操作系统、使用者应用程序、后台服务、后台应用程序等。
计算机程序可以包括:(i)例如HTML(hypertext markup language,超文本标记语言)或XML(extensible markup language,可扩展标记语言)的待解析的描述性文本,(ii)汇编代码,(iii)由编译器从源代码生成的目标代码,(iv)由解释器执行的源代码,(v)由实时编译器编译和执行的源代码,等。仅作为示例,源代码可以使用包括以下的语言的语法书写:C、C++、C#、Objective-C、Swift、Haskell、Go、SQL、R、Lisp、
为了说明和描述的目的,已经提供了实施方式的前述描述。其并非旨在穷举或限制本公开。特定实施方式的各个元件或特征通常不限于该特定实施方式,而是在适用的情况下是可互换的,并且即使未具体示出或描述,也可以在选定的实施方式中使用。同样也可以以许多方式变化。这样的变型不应被认为是背离本公开,并且所有这样的修改旨在被包括在本公开的范围内。
- 仰卧起坐锻炼装置以及仰卧起坐锻炼装置辅助锻炼方法
- 锻炼装置、锻炼系统及锻炼方法