一种用于海洋工程勘察的升沉补偿控制系统
文献发布时间:2023-06-19 18:25:54
技术领域
本发明属于海洋工勘技术领域,尤其涉及一种用于海洋工程勘察的升沉补偿控制系统。
背景技术
在海洋工程勘察船上,由于船体空间狭小,但又需要将钻探顶驱系统安装在船上;对钻探顶驱系统提出了有限空间和轻量化的要求;目前的海工顶驱中的升沉补偿控制系统还无法满足上述需求,因此需要一种能够设置在船上的海洋工程勘察的升沉补偿控制系统。
发明内容
(一)要解决的技术问题
针对现有存在的技术问题,本发明提供一种用于海洋工程勘察的升沉补偿控制系统,解决了在船上有限空间设置能够满足钻探顶驱系统的升沉补偿控制系统的问题。
(二)技术方案
为了达到上述目的,本发明采用的主要技术方案包括:一体化控制座椅机构、升沉补偿控制柜机构、被动补偿液压站机构、被动补偿高压气源房机构、钻柱被动补偿控制箱机构和基盘恒张力补偿控制箱机构;
所述升沉补偿控制柜机构设置在VFD房中,并分别与所述被动补偿液压站机构、所述被动补偿高压气源房机构、所述钻柱被动补偿控制箱机构和所述基盘恒张力补偿控制箱机构通信连接;
所述一体化控制座椅机构设置在司钻房内,并与所述升沉补偿控制柜机构通信连接;
所述升沉补偿控制柜机构能够借助于所述升沉补偿控制柜机构控制所述钻柱被动补偿控制箱机构的被动补偿工作;
所述升沉补偿控制柜机构能够借助于所述升沉补偿控制柜机构控制所述基盘恒张力补偿控制箱机构的基盘恒张力补偿工作。
优选地,所述升沉补偿控制柜机构包括:电源、通信组件、控制器和数据存储组件;
所述控制器分别与所述电源、所述通信组件、所述数据存储组件连接;
所述控制器借助于所述通信组件分别与所述一体化控制座椅机构、所述被动补偿液压站机构、所述被动补偿高压气源房机构、所述钻柱被动补偿控制箱机构和所述基盘恒张力补偿控制箱机构通信连接;
所述控制器的逻辑控制核心为PLC。
优选地,所述被动补偿液压站机构包括:液压站、液压控制阀组件和液压站控制箱;
所述液压控制阀组件设置在液压站上,用以控制液压压力能的输出;
所述液压站控制箱与所述液压控制阀组件控制连接;
所述液压控制箱通过电缆与所述升沉补偿控制柜机构通信连接。
优选地,所述被动补偿高压气源房机构包括:高压压缩机、高压气罐和补偿气阀控制箱;
所述高压压缩机与所述高压气罐连接;
所述高压气罐上设有补偿气阀组件;
所述补偿气阀控制箱与所述补偿气阀组件控制连接;
所述补偿气阀控制箱通过电缆与所述升沉补偿控制柜机构通信连接。
优选地,所述钻柱被动补偿控制箱机构包括:被动补偿控制箱、第一被动补偿液压控制阀组件、第一被动补偿液压缸组件、第一气液蓄能器组件和钻柱补偿传感反馈组件;
所述被动补偿控制箱分别与所述第一被动补偿液压控制阀组件和所述钻柱补偿传感反馈组件控制连接;
所述第一被动补偿液压控制阀组件设置在所述第一被动补偿液压缸组件上,用以控制所述第一被动补偿液压缸组件;
所述钻柱补偿传感反馈组件设置在所述第一气液蓄能器组件上。
优选地,所述第一被动补偿液压缸组件与所述液压站连接;
所述第一气液蓄能器组件分别与所述液压站和所述高压气罐连接。
优选地,所述基盘恒张力补偿控制箱机构包括:张力补偿控制箱、第二被动补偿液压控制阀组件、第二被动补偿液压缸组件、第二气液蓄能器组件和基盘补偿传感反馈组件;
所述张力补偿控制箱分别与所述第二被动补偿液压控制阀组件和所述基盘补偿传感反馈组件控制连接;
所述第二被动补偿液压控制阀组件设置在所述第二被动补偿液压缸组件上,用以控制所述第二被动补偿液压缸组件;
所述基盘补偿传感反馈组件设置在所述第二气液蓄能器组件上。
优选地,所述第二被动补偿液压缸组件与所述液压站连接;
所述第二气液蓄能器组件分别与所述液压站和所述高压气罐连接。
优选地,所述一体化控制座椅机构包括:座椅和人机交互设备;
所述人机交互设备设置在所述座椅上;
所述座椅设置在司钻房内;
所述人机交互设备通过电缆与所述升沉补偿控制柜机构通信连接;
所述人机交互设备为集启停控制、系统运行状态和紧急关断功能于一体的设备。
优选地,所述控制器内设PLC逻辑控制模块指令集;
所述PLC逻辑控制模块指令集包括:补偿液压站的控制指令集、钻柱升沉补偿正常工作指令集、升沉补偿架锁定及解锁控制指令集、基盘补偿控制指令集。
(三)有益效果
本发明的有益效果是:钻柱被动补偿主要是针对起下钻过程中,防止钻具在接触孔底前,钻头失控撞击孔底,或者在正常钻进过程中,钻压随着波浪起伏而变化过大,导致无法正常钻进施工,甚至带来施工风险。基盘的恒张力补偿一方面是为了保障基盘下放过程中基盘绞车的钢丝绳一直处于恒张力涨紧状态,防止钢丝绳在提升下放过程中容易拉断,另一方面是为了让基盘能够平稳着陆海底。补偿的原理都是通过安装在拖动端和负载端的气液弹簧吸收因海浪起伏导致的拖动端位移的变化,从而保证负载的绝对位置和受力基本不发生变化。
附图说明
图1为本发明提供的一种用于海洋工程勘察的升沉补偿控制系统的实施例中补偿气阀控制原理图;
图2为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中钻柱被动补偿气液控制原理图;
图3为本发明提供的一种用于海洋工程勘察的升沉补偿控制系统的实施例中基盘恒张力补偿气液控制原理图;
图4为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中补偿系统简化气液流程图;
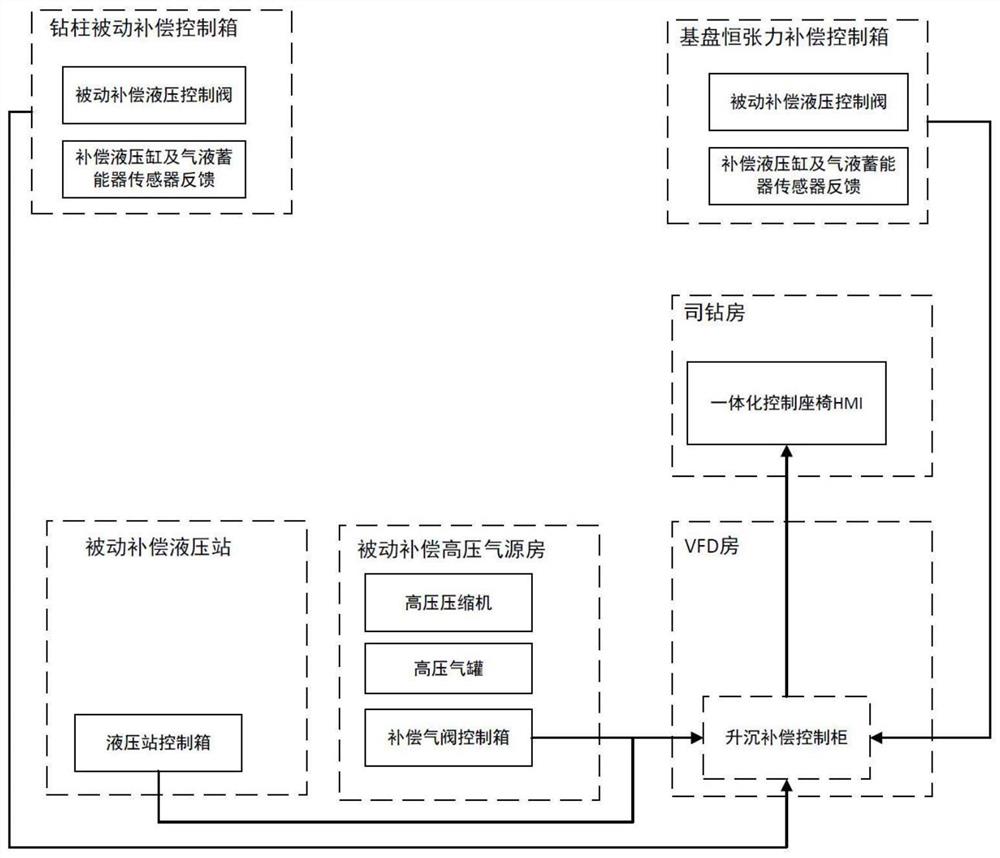
图5为本发明提供的一种用于海洋工程勘察的升沉补偿控制系统的实施例中补偿装置控制流程图;
图6为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中补偿控制系统组成图;
图7为本发明提供的一种用于海洋工程勘察的升沉补偿控制系统的实施例中补偿控制系统控制模块的界面截图;
图8为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中补偿控制系统正常工作流程示意图;
图9为本发明提供的一种用于海洋工程勘察的升沉补偿控制系统的实施例中补偿装置锁定解锁流程图;
图10为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中补偿系统司钻HMI动作示意图;
图11为本发明提供的一种海工顶驱的双通道可更换冲管机构的实施例中补偿系统HMI的控制结构逻辑图。
具体实施方式
为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
如图5所示:本实施例中公开了一种用于海洋工程勘察的升沉补偿控制系统,包括:一体化控制座椅机构、升沉补偿控制柜机构、被动补偿液压站机构、被动补偿高压气源房机构、钻柱被动补偿控制箱机构和基盘恒张力补偿控制箱机构。
该升沉补偿控制柜机构设置在VFD房中,并分别与所述被动补偿液压站机构、所述被动补偿高压气源房机构、所述钻柱被动补偿控制箱机构和所述基盘恒张力补偿控制箱机构通信连接。
本实施例中一体化控制座椅机构设置在司钻房内,并与所述升沉补偿控制柜机构通信连接;所述升沉补偿控制柜机构能够借助于所述升沉补偿控制柜机构控制所述钻柱被动补偿控制箱机构的被动补偿工作。
所述升沉补偿控制柜机构能够借助于所述升沉补偿控制柜机构控制所述基盘恒张力补偿控制箱机构的基盘恒张力补偿工作。
本实施例中升沉补偿控制柜机构包括:电源、通信组件、控制器和数据存储组件;所述控制器分别与所述电源、所述通信组件、所述数据存储组件连接。所述控制器借助于所述通信组件分别与所述一体化控制座椅机构、所述被动补偿液压站机构、所述被动补偿高压气源房机构、所述钻柱被动补偿控制箱机构和所述基盘恒张力补偿控制箱机构通信连接;所述控制器的逻辑控制核心为PLC。
本实施例中所述被动补偿液压站机构包括:液压站、液压控制阀组件和液压站控制箱;所述液压控制阀组件设置在液压站上,用以控制液压压力能的输出;所述液压站控制箱与所述液压控制阀组件控制连接;所述液压控制箱通过电缆与所述升沉补偿控制柜机构通信连接。
本实施例中所述被动补偿高压气源房机构包括:高压压缩机、高压气罐和补偿气阀控制箱;所述高压压缩机与所述高压气罐连接;所述高压气罐上设有补偿气阀组件;所述补偿气阀控制箱与所述补偿气阀组件控制连接;所述补偿气阀控制箱通过电缆与所述升沉补偿控制柜机构通信连接。
本实施例中所述钻柱被动补偿控制箱机构包括:被动补偿控制箱、第一被动补偿液压控制阀组件、第一被动补偿液压缸组件、第一气液蓄能器组件和钻柱补偿传感反馈组件;所述被动补偿控制箱分别与所述第一被动补偿液压控制阀组件和所述钻柱补偿传感反馈组件控制连接。
所述第一被动补偿液压控制阀组件设置在所述第一被动补偿液压缸组件上,用以控制所述第一被动补偿液压缸组件;所述钻柱补偿传感反馈组件设置在所述第一气液蓄能器组件上。
本实施例中所述第一被动补偿液压缸组件与所述液压站连接;所述第一气液蓄能器组件分别与所述液压站和所述高压气罐连接。
本实施例中基盘恒张力补偿控制箱机构包括:张力补偿控制箱、第二被动补偿液压控制阀组件、第二被动补偿液压缸组件、第二气液蓄能器组件和基盘补偿传感反馈组件;
所述张力补偿控制箱分别与所述第二被动补偿液压控制阀组件和所述基盘补偿传感反馈组件控制连接;所述第二被动补偿液压控制阀组件设置在所述第二被动补偿液压缸组件上,用以控制所述第二被动补偿液压缸组件;所述基盘补偿传感反馈组件设置在所述第二气液蓄能器组件上。
本实施例中所述第二被动补偿液压缸组件与所述液压站连接;所述第二气液蓄能器组件分别与所述液压站和所述高压气罐连接。
本实施例中所述一体化控制座椅机构包括:座椅和人机交互设备;所述人机交互设备设置在所述座椅上;所述座椅设置在司钻房内;所述人机交互设备通过电缆与所述升沉补偿控制柜机构通信连接;所述人机交互设备为集启停控制、系统运行状态和紧急关断功能于一体的设备。
本实施例中所述控制器内设PLC逻辑控制模块指令集。所述PLC逻辑控制模块指令集包括:补偿液压站的控制指令集、钻柱升沉补偿正常工作指令集、升沉补偿架锁定及解锁控制指令集、基盘补偿控制指令集。
本实施例中勘探船的被动升沉补偿方案分为两大部分,即钻柱的被动升沉补偿和基盘下放的恒张力补偿。钻柱被动补偿主要是针对起下钻过程中,防止钻具在接触孔底前,钻头失控撞击孔底,或者在正常钻进过程中,钻压随着波浪起伏而变化过大,导致无法正常钻进施工,甚至带来施工风险。基盘的恒张力补偿一方面是为了保障基盘下放过程中基盘绞车的钢丝绳一直处于恒张力涨紧状态,防止钢丝绳在提升下放过程中容易拉断,另一方面是为了让基盘能够平稳着陆海底。补偿的原理都是通过安装在拖动端和负载端的气液弹簧吸收因海浪起伏导致的拖动端位移的变化,从而保证负载的绝对位置和受力基本不发生变化。
勘探船升沉补偿控制系统包含钻柱被动升沉补偿系统和基盘提升下放时绞车钢丝绳的恒张力控制系统。补偿气阀控制箱原理图如图1所示。钻柱被动补偿气液控制原理图如图2所示;基盘恒张力补偿气液控制原理图如图3所示;补偿系统简化气液流程如图4。
通过对被动升沉补偿的气液流程图分析,补偿系统的控制机理主要是通过对气液电磁阀的控制、通过传感器的反馈来保证被动补偿缸和气液蓄能器的活塞位置在补偿前处于中间位置,从而能够满足在海浪起伏的情况下,能够正负补偿。在被动补偿过程中,实时检测补偿缸和气液蓄能器的压力和活塞的位置以及速度,判断在出现爆管等压力失控的情况下,紧急关断隔离阀,以防止冲缸事故发生。
(1)升沉补偿控制系统的硬件配置
补偿系统的控制系统以PLC为逻辑控制核心,使用单独的控制器进行逻辑运算,核心控制器安装在补偿控制柜,控制柜安装在VFD房。高压气源、气阀控制箱、补偿就地控制箱、补偿液压站的信号通过多芯电缆的方式接入补偿控制柜。然后补偿系统控制柜通过以太网模块和集成一体化司钻座椅钻井系统进行通信。为了减少司钻房的杂乱布置,升沉补偿控制系统没有设置单独的操作箱,而是将升沉补偿的操作和监控则集成于副司钻一体化座椅。
升沉补偿装置包括高压气源、高压气瓶组、气阀控制箱、补偿液压站、升沉补偿控制柜、钻柱补偿阀站、钻柱补偿反馈、基盘补偿阀站、基盘补偿反馈、一体化控制座椅HMI。补偿装置控制流程图如图5。
根据被动补偿系统的控制要求,集成钻井控制系统的配置,逻辑控制器选用和钻井系统一致的西门子PLC。CPU选用S7-1200系列,S7-1200设计紧凑、成本较低且具有功能强大的指令集。CPU本体集成有PROFINET/Ethernet端口,网络连接接单,无需额外的专用编程电缆和以太网扩展模块、扩展性强,可直接和钻井控制系统进行通讯交互。升沉补偿人机界面使用WinCC来进行开发。因此整个控制系统的逻辑编程设计和HMI设计使用西门子统一的TIA Portal平台,TIA Porta采用统一的工程组态和软件项目环境,集成了逻辑控制、过程控制、运动控制、传动调试、可视化组态与诊断等功能于一体,HMI可以直接调用逻辑控制的数据,不需要再单独建立数据点表和对应数据地址,方便系统调试。控制系统的组成如图6。
根据系统的功能配置,PLC的控制I/O分配如下表:
表1补偿控制系统I/O分配表
控制系统中需要反馈的模拟量如下表:
表2补偿控制系统过程量反馈
根据控制点数,选用的输入输出量模块如下表:
表3补偿控制系统模块选型
如图7-图9所示,升沉补偿控制系统的控制策略:
控制系统程序采用结构化编程方式,将升沉补偿的控制目标划分成补偿液压站的控制、钻柱升沉补偿正常工作、升沉补偿架锁定及解锁控制和基盘补偿控制四个相对独立的任务,每个独立的控制任务对应结构化程序中的一个程序段或者子程序,然后通过主程序调用这些程序块来完成控制任务。升沉补偿系统功能的操作主要包括如图10所示的动作。
为了减少单独的司钻房的操作除过紧急控制外,升沉补偿的所有操作和监控以HMI界面软操作的形式来实现。
(1)液压系统的启停;
(2)液压端补液和气液蓄能器空气侧气压的增减、液压侧液压压力的增减,中位调节逻辑控制通过安装在VFD房的被动补偿控制柜来实现。启停控制、系统运行状态和紧急关断均集成于一体化司钻座椅,的电控系统采用使用西门子PLC作为系统的控制,补偿系统的控制结构逻辑图如图11。
1、补偿系统的控制系统以PLC为逻辑控制核心,使用单独的控制器进行逻辑运算,核心控制器安装在补偿控制柜,控制柜安装在VFD房。高压气源、气阀控制箱、补偿就地控制箱、补偿液压站的信号通过多芯电缆的方式接入补偿控制柜。然后补偿系统控制柜通过以太网模块和集成一体化司钻座椅钻井系统进行通信。为了减少司钻房的杂乱布置,升沉补偿控制系统没有设置单独的操作箱,而是将升沉补偿的操作和监控则集成于副司钻一体化座椅。
2、集成钻井控制系统的配置,逻辑控制器选用和钻井系统一致的西门子PLC。CPU选用S7-1200系列,S7-1200设计紧凑、成本较低且具有功能强大的指令集。CPU本体集成有PROFINET/Ethernet端口,网络连接接单,无需额外的专用编程电缆和以太网扩展模块、扩展性强,可直接和钻井控制系统进行通讯交互。
3、升沉补偿人机界面使用WinCC来进行开发。因此整个控制系统的逻辑编程设计和HMI设计使用西门子统一的TIA Portal平台,TIA Porta采用统一的工程组态和软件项目环境,集成了逻辑控制、过程控制、运动控制、传动调试、可视化组态与诊断等功能于一体,HMI可以直接调用逻辑控制的数据,不需要再单独建立数据点表和对应数据地址,方便系统调试。
4、控制系统程序采用结构化编程方式,将升沉补偿的控制目标划分成补偿液压站的控制、钻柱升沉补偿正常工作、升沉补偿架锁定及解锁控制和基盘补偿控制四个相对独立的任务,每个独立的控制任务对应结构化程序中的一个程序段或者子程序,然后通过主程序调用这些程序块来完成控制任务。
以上结合具体实施例描述了本发明的技术原理,这些描述只是为了解释本发明的原理,不能以任何方式解释为对本发明保护范围的限制。基于此处解释,本领域的技术人员不需要付出创造性的劳动即可联想到本发明的其它具体实施方式,这些方式都将落入本发明的保护范围之内。
- 一种用于海洋工程勘察浮动平台的升沉补偿架
- 一种用于海洋工程勘察浮动平台的升沉补偿系统