一种基于像素坐标的保护装置压板排序方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于于电力系统继电保护装置智能运维技术领域,具体涉及一种基于像素坐标的保护装置压板排序方法。
背景技术
继电保护压板在整个继电保护系统中扮演重要的角色(以下均称压板),关系到能否可靠的切除故障,压板按功能划分为功能压板及出口压板,功能压板负责相关保护功能的投退,出口压板负责将出口跳闸信号正确的传到断路器操作机构,完成断路器的跳闸;可见压板正确投退与否,直接关系到保护能否正确的动作。
为了监视压板正确投退与否,当前出现了基于视觉的目标检测的压板识别技术,通过图像识别来完成压板状态的监视,但目标检测得到的是每个对象的目标检测框坐标值,并不能获得每个压板对象的排列顺序,现场保护压板排列顺序一般为从左到右,从上到下的排列方式,如果拍摄的图片位置为压板面板的正中,则识别压板顺序经过简单的处理即可得到压板的顺序及位置,但现场由于拍摄角度的原因,角度会有很大的误差,在这种情况下,正确识别压板顺序及位置难度较大,如不能正确识别压板位置顺序,将造成识别系统误判压板投退状态。因此,正确获得压板的压板的位置顺序是压板位置状态识别是否正确的关键因素之一。如何克服现有技术的不足是目前本技术领域亟需解决的问题。
发明内容
本发明的目的是为了解决现有技术的不足,提供一种基于像素坐标的保护装置压板排序方法。
为实现上述目的,本发明采用的技术方案如下:
一种基于像素坐标的保护装置压板排序方法,包括如下步骤:
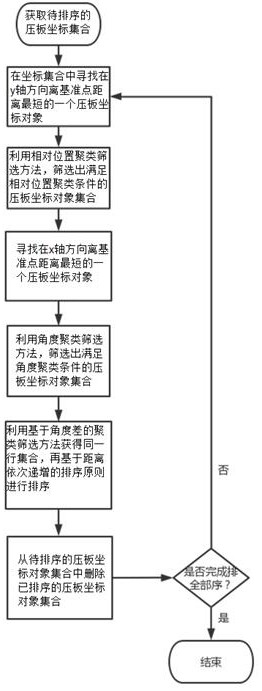
步骤1:获取待排序的压板坐标集合;
步骤2:在坐标集合中寻找在y轴方向离基准点距离最短的一个压板坐标对象;
步骤3:以步骤2获得的压板坐标对象为参考,利用相对位置聚类筛选方法,筛选出满足相对位置聚类条件的压板坐标对象集合;
步骤4:基于步骤3筛选出来的压板坐标集合,寻找在x轴方向离基准点距离最短的一个压板坐标对象;
步骤5:以步骤4获得的压板坐标对象为参考,利用角度聚类筛选方法,筛选出满足角度聚类条件的压板坐标对象集合;
步骤6:基于步骤5筛选出来的压板坐标对象集合,利用基于角度差的聚类筛选方法获得同一行集合,再基于距离依次递增的排序原则,完成对该压板坐标对象集合从基准点沿x轴到另外一侧的依次排列,得到一行的压板坐标对象序列;
步骤7:从待排序的压板坐标对象集合中删除已排序的压板坐标对象集合;
步骤8:判断是否排序完成全部排序,若没有完成,则重复步骤2~步骤7。
进一步,优选的是,步骤1中,获取待排序的压板坐标对象集合的具体方法为:
将每个压板采用最小内接矩形进行覆盖,令压板坐标为(x1,y1,x2,y2),如图3所示,以该坐标作为一个压板坐标对象,其中,坐标(x1、y1)为最小内接矩形左上角顶点坐标,(x2、y2)为最小内接矩形右下角顶点坐标;在同一坐标系下,采集所有压板相应的位置坐标数据,构成集合items_set1。
进一步,优选的是,步骤3中,相对位置聚类筛选方法的具体方法为:
公式(1)中,h为最小内接矩形的高度,α为上限取值系数,β为下限取值系数,取值限制条件为:α<β;
min_y1表示的是步骤2获得的距离最短的一个压板坐标对象的左上角顶点的y轴方向坐标值;
利用公式(2)完成压板坐标对象的筛选,item_y1为待排序的压板坐标对象集合中的一项的左上角顶点的y轴方向坐标值,item_y2为待排序的压板坐标对象集合中的一项的右下角顶点的y轴方向坐标值;items_set_1和items_set_2为经过上述条件过滤得到的压板坐标对象集合,最终获得的items_set2为items_set_1和items_set_2的并集。
进一步,优选的是,α为上限取值系数,取值范围为:0.0<α<1.0,β为下限取值系数,取值范围为:0.0<β<1.0。
进一步,优选的是,所述步骤5中,角度聚类筛选方法为:通过步骤4中得到的压板坐标对象作为参考对象,选取参考对象最小内接矩形的右上角顶点作为参考点;在压板坐标集合中,把其它待排序的压板坐标对象作为计算对象,选取计算对象最小内接矩形的右上角顶点作为计算点,依此计算各个计算点和参考点之间的距离和角度,作为待排序的压板坐标对象的距离值和角度值,距离和角度的计算方法如图2所示;
筛选压板坐标集合的具体方法为:
items_set3={item∈items_set2|-90°<item_angle<90°} (3)
利用式(3)作为第一次过滤的判据,获得满足该条件的压板坐标集合items_set3;item表示压板坐标对象,Items_set2为步骤3中筛选得到的压板坐标对象集合,item_angle表示压板坐标对象的角度值。
进一步,优选的是,步骤6中,基于角度差的聚类筛选方法的具体方法为:
获取步骤5中筛选得到的压板坐标对象集合items_set3及该集合中的压板坐标对象和参考点之间的距离值和角度值,取其中得到绝对值最小的角度angle_min,以该角度为基准,获得满足(4)式的集合items_set4:
式(4)中,angle_diff_thsold为角度差阈值为5°,item表示压板坐标对象,Items_set3为步骤5中筛选得到的压板坐标对象集合,angle1为角度上限值,angle2为角度下限值,item_angle表示压板坐标对象的角度值;
把items_set4集合中的每个压板坐标作为计算对象,获得计算对象和参考对象之间的距离值,基于距离依次递增的排序原则是对items_set4集合中的压板坐标对象的距离值进行排序,依次从小到大或从大到小,即可得到一行按照x方向依次排列的压板对象序列。
进一步,优选的是,angle_diff_thsold为角度差阈值,取值为5°。
进一步,优选的是,所述步骤7中,按照式(5)从待排序的压板坐标集合中删除已排序的压板坐标集合,得到集合items_set5;
式(5)中,item表示坐标对象,Items_set1为步骤1中筛选得到的压板坐标对象集合,Items_set4为步骤6中筛选得到的压板坐标对象集合。
进一步,优选的是,所述步骤8的具体方法为:
判断集合items_set5是否还有对象,若有,则直接跳转到步骤2;若没有,则说明已完成排序。
本发明中,基准点为一个像素坐标系中的坐标系原点。
本发明中,对于集合中压板坐标对象的最小内接矩形大小来说,考虑压板工作状态、拍摄角度及拍摄位置的不同,绘制出的最小内接矩形框大小存在差别
本发明中,参考点和计算点则是通过压板坐标对象的最小内接矩形坐标获得的一个点,该点可以为最小内接矩形的重心、左上角顶点、右下角顶点、左下角顶点及右上角顶点,用来作距离和角度的计算,参考点和计算点的选取原则必须相同。
本发明与现有技术相比,其有益效果为:
(1)本发明可利用压板序列的坐标集合,直接完成多行(列)的压板坐标对象的排列;
(2)本发明可以在多角度拍摄的压板照片中基于压板坐标获得准确的压板对象排序,可以有效的提升不同拍摄角度下压板坐标序列的排序正确率。
附图说明
图1是本发明的方法流程图;
图2是本发明参考点与计算点距离与角度计算示意图;
图3是本发明压板坐标对象在坐标系中的位置示意图;
图4是本发明实施例的压板序列排序结果;
具体实施方式
下面结合实施例对本发明作进一步的详细描述。
本领域技术人员将会理解,下列实施例仅用于说明本发明,而不应视为限定本发明的范围。实施例中未注明具体技术或条件者,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。所用材料或设备未注明生产厂商者,均为可以通过购买获得的常规产品。
实施例1
如图1所示,一种基于像素坐标的保护装置压板排序方法,包括如下步骤:
步骤1:获取待排序的压板坐标集合;
步骤2:在坐标集合中寻找在y轴方向离基准点距离最短的一个压板坐标对象;
步骤3:以步骤2获得的压板坐标对象为参考,利用相对位置聚类筛选方法,筛选出满足相对位置聚类条件的压板坐标对象集合;
步骤4:基于步骤3筛选出来的压板坐标集合,寻找在x轴方向离基准点距离最短的一个压板坐标对象;
步骤5:以步骤4获得的压板坐标对象为参考,利用角度聚类筛选方法,筛选出满足角度聚类条件的压板坐标对象集合;
步骤6:基于步骤5筛选出来的压板坐标对象集合,利用基于角度差的聚类筛选方法获得同一行集合,再基于距离依次递增的排序原则,完成对该压板坐标对象集合从基准点沿x轴到另外一侧的依次排列,得到一行的压板坐标对象序列;
步骤7:从待排序的压板坐标对象集合中删除已排序的压板坐标对象集合;
步骤8:判断是否排序完成全部排序,若没有完成,则重复步骤2~步骤7。
实施例2
如图1所示,一种基于像素坐标的保护装置压板排序方法,包括如下步骤:
步骤1:获取待排序的压板坐标集合;
步骤2:在坐标集合中寻找在y轴方向离基准点距离最短的一个压板坐标对象;
步骤3:以步骤2获得的压板坐标对象为参考,利用相对位置聚类筛选方法,筛选出满足相对位置聚类条件的压板坐标对象集合;
步骤4:基于步骤3筛选出来的压板坐标集合,寻找在x轴方向离基准点距离最短的一个压板坐标对象;
步骤5:以步骤4获得的压板坐标对象为参考,利用角度聚类筛选方法,筛选出满足角度聚类条件的压板坐标对象集合;
步骤6:基于步骤5筛选出来的压板坐标对象集合,利用基于角度差的聚类筛选方法获得同一行集合,再基于距离依次递增的排序原则,完成对该压板坐标对象集合从基准点沿x轴到另外一侧的依次排列,得到一行的压板坐标对象序列;
步骤7:从待排序的压板坐标对象集合中删除已排序的压板坐标对象集合;
步骤8:判断是否排序完成全部排序,若没有完成,则重复步骤2~步骤7。
步骤1中,获取待排序的压板坐标对象集合的具体方法为:
将每个压板采用最小内接矩形进行覆盖,令压板坐标为(x1,y1,x2,y2),压板坐标为压板图形元素在图片中的坐标数据,如图3所示,以该坐标作为一个压板坐标对象,其中,坐标(x1、y1)为最小内接矩形左上角顶点坐标,(x2、y2)为最小内接矩形右下角顶点坐标;在同一坐标系下,采集所有压板相应的位置坐标数据,构成集合items_set1。
步骤2中,基准点为坐标中一个像素坐标系中的坐标系原点,通过压板坐标对象获得一个点作为计算点,该点可以为压板坐标对象的重心、左上角顶点、右下角顶点、左下角顶点及右上角顶点,距离最短表示基准点和计算点的纵轴方向的距离最短。
步骤3中,相对位置聚类筛选方法的具体方法为:
公式(1)中,h为最小内接矩形的高度,α为上限取值系数,β为下限取值系数,取值限制条件为:α<β;
min_y1表示的是步骤2获得的距离最短的一个压板坐标对象的左上角顶点的y轴方向坐标值;
利用公式(2)完成压板坐标对象的筛选,item_y1为待排序的压板坐标对象集合中的一项的左上角顶点的y轴方向坐标值,item_y2为待排序的压板坐标对象集合中的一项的右下角顶点的y轴方向坐标值;items_set_1和items_set_2为经过上述条件过滤得到的压板坐标对象集合,最终获得的items_set2为items_set_1和items_set_2的并集。
α为上限取值系数,取值范围为:0.0<α<1.0,β为下限取值系数,取值范围为:0.0<β<1.0。
实施例3
如图1所示,一种基于像素坐标的保护装置压板排序方法,包括如下步骤:
步骤1:获取待排序的压板坐标集合;
步骤2:在坐标集合中寻找在y轴方向离基准点距离最短的一个压板坐标对象;
步骤3:以步骤2获得的压板坐标对象为参考,利用相对位置聚类筛选方法,筛选出满足相对位置聚类条件的压板坐标对象集合;
步骤4:基于步骤3筛选出来的压板坐标集合,寻找在x轴方向离基准点距离最短的一个压板坐标对象;
步骤5:以步骤4获得的压板坐标对象为参考,利用角度聚类筛选方法,筛选出满足角度聚类条件的压板坐标对象集合;
步骤6:基于步骤5筛选出来的压板坐标对象集合,利用基于角度差的聚类筛选方法获得同一行集合,再基于距离依次递增的排序原则,完成对该压板坐标对象集合从基准点沿x轴到另外一侧的依次排列,得到一行的压板坐标对象序列;
步骤7:从待排序的压板坐标对象集合中删除已排序的压板坐标对象集合;
步骤8:判断是否排序完成全部排序,若没有完成,则重复步骤2~步骤7。
步骤1中,获取待排序的压板坐标对象集合的具体方法为:
将每个压板采用最小内接矩形进行覆盖,令压板坐标为(x1,y1,x2,y2),压板坐标为压板图形元素在图片中的坐标数据,如图3所示,以该坐标作为一个压板坐标对象,其中,坐标(x1、y1)为最小内接矩形左上角顶点坐标,(x2、y2)为最小内接矩形右下角顶点坐标;在同一坐标系下,采集所有压板相应的位置坐标数据,构成集合items_set1。
步骤2中,基准点为坐标中一个像素坐标系中的坐标系原点,通过压板坐标对象获得一个点作为计算点,该点可以为压板坐标对象的重心、左上角顶点、右下角顶点、左下角顶点及右上角顶点,距离最短表示基准点和计算点的纵轴方向的距离最短。
步骤3中,相对位置聚类筛选方法的具体方法为:
公式(1)中,h为最小内接矩形的高度,α为上限取值系数,β为下限取值系数,取值限制条件为:α<β;
min_y1表示的是步骤2获得的距离最短的一个压板坐标对象的左上角顶点的y轴方向坐标值;
利用公式(2)完成压板坐标对象的筛选,item_y1为待排序的压板坐标对象集合中的一项的左上角顶点的y轴方向坐标值,item_y2为待排序的压板坐标对象集合中的一项的右下角顶点的y轴方向坐标值;items_set_1和items_set_2为经过上述条件过滤得到的压板坐标对象集合,最终获得的items_set2为items_set_1和items_set_2的并集。
α为上限取值系数,取值范围为:0.0<α<1.0,β为下限取值系数,取值范围为:0.0<β<1.0。
步骤4中,基准点为坐标中一个像素坐标系中的坐标系原点,另外通过压板坐标对象获得一个点作为计算点,该点可以为压板坐标对象的重心、左上角顶点、右下角顶点、左下角顶点及右上角顶点,距离最短表示基准点和计算点的横轴方向的距离最短。
所述步骤5中,角度聚类筛选方法为:通过步骤4中得到的压板坐标对象作为参考对象,选取参考对象最小内接矩形的右上角顶点作为参考点;在压板坐标集合中,把其它待排序的压板坐标对象作为计算对象,选取计算对象最小内接矩形的右上角顶点作为计算点,依此计算各个计算点和参考点之间的距离和角度,作为待排序的压板坐标对象的距离值和角度值,距离和角度的计算方法如图2所示;
筛选压板坐标集合的具体方法为:
items_set3={item∈items_set2|-90°<item_angle<90°} (3)
利用式(3)作为第一次过滤的判据,获得满足该条件的压板坐标集合items_set3;item表示压板坐标对象,Items_set2为步骤3中筛选得到的压板坐标对象集合,item_angle表示压板坐标对象的角度值。
步骤6中,基于角度差的聚类筛选方法的具体方法为:
获取步骤5中筛选得到的压板坐标对象集合items_set3及该集合中的压板坐标对象和参考点之间的距离值和角度值,取其中得到绝对值最小的角度angle_min,以该角度为基准,获得满足(4)式的集合items_set4:
式(4)中,angle_diff_thsold为角度差阈值为5°,item表示压板坐标对象,Items_set3为步骤5中筛选得到的压板坐标对象集合,angle1为角度上限值,angle2为角度下限值,item_angle表示压板坐标对象的角度值;
把items_set4集合中的每个压板坐标作为计算对象,获得计算对象和参考对象之间的距离值,基于距离依次递增的排序原则是对items_set4集合中的压板坐标对象的距离值进行排序,依次从小到大或从大到小,即可得到一行按照x方向依次排列的压板对象序列。
angle_diff_thsold为角度差阈值,取值为5°。其意义为同一行(列)的压板集合,其和第一个参考点的相对角度基本相同,只要在这个范围之内的可判定为同一行(列)。
所述步骤7中,按照式(5)从待排序的压板坐标集合中删除已排序的压板坐标集合,得到集合items_set5;
式(5)中,item表示坐标对象,Items_set1为步骤1中筛选得到的压板坐标对象集合,Items_set4为步骤6中筛选得到的压板坐标对象集合。
所述步骤8的具体方法为:
判断集合items_set5是否还有对象,若有,则直接跳转到步骤2;若没有,则说明已完成排序。
应用实例
本实例中获得某水电厂经过标记定位的压板坐标对象,这里采用从左到右,从上到下的排序原则来进行验证,标记的坐标为像素坐标值,具体压板序列见表1。
表1待排序的压板对象序列
以第一行排序为例,进行详细说明:
第一步,得到表1中的待排序压板坐标对象集合;
第二步,找到与像素坐标原点在y轴方向距离最近的一个点,从待排序列表里获得,找到19号压板坐标对象为第一行的参考对象,其坐标为(410,1013,516,1177),通过它获得的参考点为(516,1013);
第三步,在19号压板坐标对象,参数h为164,α取0.25,β取0.75,w1为1054,w2为1136;筛选出items_set2:(410.0,1013.0,516.0,1177.0),(509.0,1065.0,610.0,1235.0),(611.0,1119.0,735.0,1290.0),(727.0,1178.0,847.0,1359.0),(852.0,1240.0,970.0,1419.0),(979.0,1303.0,1096.0,1492.0),(1119.0,1378.0,1242.0,1570.0),(1269.0,1449.0,1400.0,1650.0)。
第四步,在集合items_set2中找到与像素坐标原点在y轴方向距离最近的一个压板坐标对象,是19号压板坐标对象;
第五步,过滤后的集合为items_set3:(410.0,1013.0,516.0,1177.0),(852.0,1240.0,970.0,1419.0),(1269.0,1449.0,1400.0,1650.0),(509.0,1065.0,610.0,1235.0),(611.0,1119.0,735.0,1290.0),(727.0,1178.0,847.0,1359.0),(979.0,1303.0,1096.0,1492.0),(1119.0,1378.0,1242.0,1570.0)
第六步,经过筛选,20号坐标得到的角度为angle_min-26.9°,angle1为-21.9°,angle2为-31.9°,angle_diff_thsold为5°,筛选出items_set4,在此基础上计算items_set4集合中的压板坐标对象与19号压板坐标对象的距离值并排序,排序后结果为,格式是[压板对象编号,距离值]:[19,0],[26,111.8],[18,227.2],[6,357.4],[10,496.9],[2,638.6],[3,797.4],[20,963.3],得到items_set5。
第七步,从待排序集合items_set1中剔除已排序的items_set5。
第八步,判断排序是否结束,未结束则跳转到第二步继续完成排序,直至所有排序结束。
如果简单的利用坐标大小从左到右,从上的排序进行排列是不能得到准确的排序顺序的,采用本发明的排序方法,可以正确的完成压板坐标序列的排序,以下是排序后的编号顺序:19、26、18、6、10、2、3、20(第一行);25、24、16、13、11、4、12、7(第二行);21、28、27、22、31、1、5、29(第三行);30、32、23、15、17、14、9、8(第四行),具体的排列如图4所示。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种基于机器视觉的像素坐标与机械臂坐标统一的方法
- 一种基于PTZ相机的GPS坐标与像素坐标的转换方法