一种基于Mvvm的五轴联动控制系统及其控制方法
文献发布时间:2023-06-19 18:29:06
技术领域
本发明属于加工中心控制系统设计的技术领域,尤其涉及一种基于Mvvm的五轴联动控制系统及其控制方法。
背景技术
五轴联动加工中心是专门用于加工复杂曲面的精密加工中心,其控制参数非常多。既需要通过业务层的多个控制回路对各机构进行精确控制,又需要通过视图层的UI界面实时表现工件的加工状态,这会在业务层与视图层之间产生耦合作用。耦合作用会导致系统的可理解性、可测试性、可靠性和可维护性受到影响。因此在设计五轴联动加工中心的控制系统时,应尽量减弱业务层与视图层之间的耦合影响,即实现视图层与业务层的解耦。
同时,随着现代计算机的发展,五轴联动加工中心所产出的产品参数越发复杂,其所需运算量极为庞大,而庞大的运算量和繁杂的执行参数命令既会产生较强的耦合作用影响运算结果和机构执行参数的精度,又会出现算力不足系统卡顿的问题。因此,传统的五轴联动加工中心系统在克服耦合作用、系统算力和交互体验优化的方面具有显著的缺陷,严重影响了五轴联动加工中心的产出效率和质量。
基于上述原因,亟需一种五轴联动控制系统,实现视图层与业务层的解耦,并以此为基础对该系统在设计、功能和维护方面全面优化。
发明内容
本发明的目的在于,提供一种基于Mvvm的五轴联动控制系统,解决五轴联动加工中心控制系统易受到耦合作用影响,并且系统开发技术落后难以提高算力和交互体验的问题。
本发明是通过以下技术方案实现的:
一种基于Mvvm的五轴联动控制系统,包括:
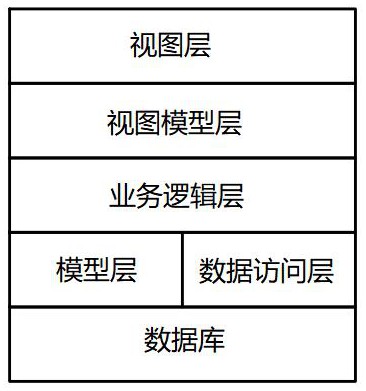
基于MVVM架构与WPF架构组合而成的底层框架,在该底层框架内设置有视图层、视图模型层、模型层、业务逻辑层、数据访问层和数据库;
所述视图层为采用WPF技术自定义开发的可视化界面,所述视图层用于与终端用户交互;
所述视图模型层用于所述视图层与所述模型层的数据绑定;所述视图模型层将一个所述视图层与多个所述模型层关联,或所述视图模型层将多个所述模型层与一个所述模型层关联;
所述模型层包括视图控件与PLC地址数据模型,所述视图控件与所述PLC地址数据模型绑定关联后,通过刷新寄存器以刷新所述可视化界面的显示内容;
所述业务逻辑层用于控制系统的业务逻辑;
所述数据访问层用于对所述数据库的操作;
所述数据库用于存储数据。
优选的,所述业务逻辑层采用多线程异步通信,解除各层通信间的数据发送和接收响应绑定关系。
优选的,所述业务逻辑层包括OSA通讯服务接口,所述OSA通讯服务接口用于进行上下位机通讯对相关数据的处理,其处理方式包括底纸批量刷新、报警数据显示、寄存器变量控制和文件下发。
优选的,所述数据库包括Mysql数据库和SqliteDb数据库;所述Mysql记录设备运行数据,所述SqliteDb存储机器参数数据。
优选的,该系统的设计语言包括C#语言和XAML语言,其中XAML语言用于开发所述视图层,C#语言用于开发所述业务逻辑层。
优选的,所述视图层包括加工模块;所述加工模块采用PTPWood软件,其用于可视化控制二维PTP导向、吸盘和木板加工路径。
优选的,所述视图层还包括绘图模块;所述绘图模块采用Cancas画板。
优选的,所述视图层还包括三维视图模块;所述三维视图模块将所述加工模块中的二维导向转换为三维视图,并对该三维视图进行旋转、拖动和缩放调节。
优选的,所述视图层还包括数据可视化模块;所述数据可视化模块用于可视化控制机器状态,该机器状态包括进给速率、主轴速率、加工记录、报警记录以及木板加工情况。
一种基于Mvvm的五轴联动控制方法,该方法适配于上述方案中任意一项所述的基于Mvvm的五轴联动控制系统,包括如下步骤:
步骤一:打开电源开关,启动五轴联动加工中心并同时启动其控制系统;
步骤二:在视图层对机器的各执行机构进行参数设置;
步骤三:在视图层操作各执行机构按照预设加工路径进行加工,并通过视图层的界面观察木板的加工状态;
步骤四:在视图层调节各执行机构的位置和状态;
步骤五:出现故障时系统警报并停止运行。
步骤六:完成加工,关闭电源。
本发明的有益效果为:
本发明的五轴联动控制系统以MVVM架构和WPF架构组合构成底层框架,通过MVVM架构的解耦效果提升该控制系统的可理解性、可测试性、可靠性和可维护性。并且在此基础上以两种编程语言分别作为前端界面语言和后台控制语言,实现设计过程的并行简化,提高了维护效率。更是在五轴联动加工中心的运算量越来越大,对CPU造成的负荷越来越大的情况下,通过WPF技术在图形界面处理上充分利用计算机提供的显卡功能辅助处理,节约了CPU的运算空间,整体提升运算速度,保证了该系统运行的流畅与处理速度,提高了五轴联动加工中心的产出效率和产品质量。
附图说明
图1为本发明在一实施例中提供的基于Mvvm的五轴联动控制系统的框架示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步说明。
如图1所示,本实施例提供了一种基于Mvvm的五轴联动控制系统,包括基于MVVM架构与WPF架构组合而成的底层框架,在该底层框架内设置有视图层、视图模型层、模型层、业务逻辑层、数据访问层和数据库。通过MVVM架构将视图层与业务逻辑层分开,实现系统前端与后台之间的解耦,再通过WPF架构深度优化该五轴联动控制系统的自定义开发功能、绘图模型、动画技术和三维显示功能。
MVVM是Model-View-ViewModel的简写,Model即模型层作为后台的数据的框架,View即视图层是指前端UI视图框架,ViewModel即视图模型层将视图层和模型层连接组成具备解耦效果的架构。其中视图模型层是MVVM架构的核心,一方面可以通过数据绑定将模型层中的数据传递到视图层进行显示,另一方面可以将视图层数据变化的情况反馈到模型层,实现对视图层交互操作的响应。
基于五轴联动的控制系统需要对众多控制参数、采集数据和执行命令进行统筹管理,其视图层与业务逻辑层之间的复杂性、引用各层模块的位置和数据传输的方式都会产生较强的耦合影响,因此将MVVM架构应用于该五轴联动控制系统的底层框架中,能够显著减小耦合度以降低前端视图层与后台业务逻辑层之间的互相影响,以提升系统的可理解性、可测试性、可靠性和可维护性。
而WPF架构是基于Windows的用户截面框架,能够提供统一的编程模型、编程语言和底层框架,能够实现分离界面设计与开发的效果,并且还能够提供全新的交互功能,提升用户的视图界面交互体验。基于此,本实施例五轴联动控制系统的设计语言包括C#语言和XAML语言两种,其中XAML语言用于开发视图层作为界面语言,C#语言用于开发业务逻辑层作为控制语言。使该控制系统在设计过程中可将界面设计与控制设计分为两组同步进行,极大的提升了该系统的设计效率。同时采用两种不同的语言也更有利于区分和搜寻错误的位置,降低维护难度,减少维护过程中的失误率,进一步提升了该控制系统的可维护性。
本实施例的控制系统由MVVM架构和WPF架构共同组成底层框架,以WPF技术开发可视化界面作为视图层,与终端用户实现交互。WPF的开发程序中每个视图层的模块对应一个类文件,属于紧密耦合的状态互相影响。MVVM模式中的一个属于视图层的模块的XAML文件均可以关联多个视图模型层的类文件;或者多个属于视图层的模块的XAML文件也可以关联一个视图模型层的类文件。该种关联模式可实现加工过程中通过视图层对多个加工机构进行协同控制。其中数据模型是模型层的类文件,而模型层的类文件分为视图控件和后台PLC地址数据类模型,通过Binging关联之后,再刷新寄存器即可自动刷新界面显示,通过这种模式达到视图层的UI模块与后台程序解耦的目的。
业务逻辑层主要通过OSA通讯服务接口来进行上下位机通讯对相关联数据的处理。其处理方式包括底纸批量刷新、报警数据显示、寄存器变量控制和文件下发。
为了更好的保障通信效果,本实施例的业务逻辑层还采用了异步通信技术,该异步通信技术是指发送方发出数据后,无需等待接收方发回的反馈或响应便可继续发送下个数据包的通讯方式。异步通信需要同时采用多线程技术,以确保异步通信的线程与主线程并行运行互不干扰,保证程序的正常运行。
本发明的五轴联动控制系统基于WPF架构的自定义控件开发技术,在视图层中开发有加工模块,该加工模块采用PTPWood软件适配机器操作,实现输入参数和命令的交互效果。该加工模块能够执行的操作包括可视化地控制二维PTP导向、可视化地控制吸盘移动位置和显示木板的加工路径。
本发明的五轴联动控制系统基于WPF架构的自定义控件开发技术,在视图层中还开发有绘图模块,该绘图模块采用Cancas画板技术,实时显示二维PTP导向、吸盘移动位置与显示木板加工路径;并利用以来属性算法实现了图像参数化编辑显示、实现对位置区域的加工效果演示。
本发明的五轴联动控制系统基于WPF架构的自定义控件开发技术,在视图层中还开发有三维视图模块。该三维视图模块将加工模块中的二维PTP导向转换为三维视图展示给用户,并且可对该三维视图进行旋转、拖动和缩放调节。通过三维视图模块呈现的模型保证机床与木板件的布局真实性。并对于简单的矩形模型实用自定义制作三维模型,而结构复杂的吸盘模型则可通过导入obj模型文件的方式获得。
添加模型的变化控制技术由Transform3D派生三个变换类,分别是仿射变换类、矩阵变换类和一个的组合。平移变换、缩放变换和旋转变换都派生于仿射变换,均属于仿射变换的范畴。经过仿射变换直线仍然是直线,而平行线也保持平行。WPF中也有非仿射变换,如透视投影变换。由于MatrixTransform3D通过矩阵来变换,因此非常灵活;可以将变换组合起来,形成组合变换。本实施例中主要采用了平移、缩放、旋转和透视投影的技术来显示吸盘、导向、木板以及木板的加工路径,建立虚拟在线监视检测系统的运行状态。
值得一提的是,本实施例的控制系统还在视图层的界面中应用了属于WPF特有的图形界面动画技术,可以将间断的数据以动画的方式呈现给用户。同时,在WPF中不再需要使用计时器来设计动画的时间。
本发明的五轴联动控制系统基于WPF架构的自定义控件开发技术,在视图层中还开发有数据可视化模块。数据可视化模块用于可视化控制机器状态,该机器状态包括进给速率、主轴速率、加工记录、报警记录以及木板加工情况。并利用MVVM架构实现的解耦效果以及OSA多线程异步通信的技术实时呈现,确保准确展示及其状态的同时不干扰到机器的运行。
本发明的五轴联动控制系统基于WPF架构的自定义控件开发技术,在视图层中还开发有刀库设置模块。该刀库设置模块用于更换五轴联动当前所选用的刀具类型。本实施例中,五轴联动预先准备有两个大直径圆形刀盘和一个直线刀盘,可通过该刀库设置模块执行正反转对刀的操作,还具有选择刀长、偏移量和刀径等参数的功能。
数据访问层主要是对数据库进行操作,记录加工数据、报警数据、及其运行情况等数据,并可进行增添、删改、查询的工作。
数据库包括Mysql数据库和SqliteDb数据库;其中Mysql记录设备运行数据,SqliteDb存储机器参数数据。
本实施例的五轴联动还包括有常规设置模块,其用于设置工作台的大小、工件坐标、机器分区停靠位置等参数。还可编辑多个机床,对多个机床的增加、删除、修改和查询功能,应用视图层同步显示实际的二维加工状态和三维视图状态。
本发明还提供了一种基于Mvvm的五轴联动控制方法,该方法适配于上述实施例中任意一项的基于Mvvm的五轴联动控制系统,包括如下步骤:
步骤一:打开电源开关,启动五轴联动加工中心并同时启动其控制系统;
步骤二:在视图层对机器的各执行机构进行参数设置;
步骤三:在视图层操作各执行机构按照预设加工路径进行加工,并通过视图层的界面观察木板的加工状态;
步骤四:在视图层调节各执行机构的位置和状态;
步骤五:出现故障时系统警报并停止运行。
步骤六:完成加工,关闭电源。
以上实施方式中的各种技术特征可以任意进行组合,只要特征之间的组合不存在冲突或矛盾即可,但是限于篇幅,未进行一一描述。
本发明并不局限于上述实施方式,如果对本发明的各种改动或变型不脱离本发明的精神和范围,倘若这些改动和变型属于本发明的权利要求和等同技术范围之内,则本发明也意图包含这些改动和变动。
- 一种七轴五联动增减材加工数控机床运动控制系统及方法
- 一种五轴联动数控机械手抛光控制系统及方法
- 一种五轴联动数控机械手抛光控制系统及方法