一种载带成型机及其成型工作方法
文献发布时间:2023-06-19 19:37:02
技术领域
本发明涉及一种载带成型结构,尤其是一种载带成型机及其成型工作方法。
背景技术
现有的载带成型机,主要通过加热模加热、成型模成型、针模打孔和压料拉带等四个步骤来完成的,如专利一种载带成型装置(公告号为CN213353614U)包括工作台,所述工作台上设置有加热机构、成型机构、以及传输机构,所述加热机构、所述成型机构依次设置在所述工作台上,所述传输机构的传输通道设置在所述加热机构、所述成型机构内侧;设置在所述传输通道的载带原料,依次通过加热机构、成型机构成型,此类的成型装置旨在通过在成型机构前加设加热机构,使载带原料进行加热预处理后,通过成型机构冲压成型,提高载带生产的良品率,降低生产成本,而其并未改变传统装置中通过固定的导轨来实现载带的传输限位,而这种传统的传输配合方式,则会导致在进行载带首段的加工时,需要操作人员人工将载带通过加热区、成型区和打孔区,并由导轨限位后规整至压料拉带结构处,不仅费时费力,人工误差风险较大,而且载带首段还将会遗留出较长的加工空白区,造成载带的浪费;
且现有的装置中,由于加热机构、成型机构、打孔机构以及传输机构分别属于相对独立的加工单元,在加工开始前,需要确定各个加工单元的位置,故而则不可避免的需要一组能够将上述各个单元进行统一定位的水平面板,尤其是对传输机构,其位置的确定与调整均较为费时费力。
发明内容
为了解决上述技术问题,本发明的目的是提供一种载带成型机及其成型工作方法,不仅能够实现载带首段的自动化输送加工,而且传输单元与各个加工单元之间的位置确定更加简单方便。
本发明提供了如下的技术方案:
一种载带成型机及其成型工作方法,包括模架一、模架二、模架三和传输单元,传输单元用于传输载带依次经过模架一、模架二和模架三,模架一用于安装加热模来对经过其中的载带进行加热,模架二用于安装成型模来对经过其中的载带进行冲压成型,模架三用于安装冲孔针模来对经过其中的载带进行打孔,模架一、模架二和模架三均包括有上架板、下架板和支撑定位在上架板和下架板之间且呈矩形分布的四组支撑导柱,传输单元包括两组平行设置且横向穿过模架一、模架二和模架三的横架杆,横架杆上横向分布有用于与模架一、模架二和模架三的支撑导柱依次对位锁定的锁定位,此时通过预设的锁定位即可确定模架一、模架二和模架三的水平固定间距,且在模架一、模架二、模架三位置固定后,横架杆的位置自然确定并与模架一、模架二和模架三的位置进行锁定;
横架杆上沿横向依次分布有固定轨夹、滑动轨夹一、滑动轨夹二和滑动轨夹三,两组横架杆上相对设置的固定轨夹定位于模架一的一侧,两组横架杆上相对设置的滑动轨夹一用于夹持载带首段两侧由靠近固定轨夹的一端经过模架一后定位于模架一、模架二之间,两组横架杆上相对设置的滑动轨夹二用于夹持载带首段两侧由靠近固定轨夹的一端经过模架一、模架二后定位于模架二、模架三之间,两组横架杆上相对设置的滑动轨夹三用于夹持载带首段两侧由靠近固定轨夹的一端依次经过模架一、模架二和模架三后定位于模架三一侧,
滑动轨夹三包括两组固定夹和一组位于固定夹之间的往复活动夹,两组固定夹之间通过连接件固定相连,连接件的横向开槽内安装有与往复活动夹的螺母块螺纹连接的螺杆,螺杆由往复电机驱动,且用于带动往复活动夹在两组固定夹之间做直线往复运动,来控制载带的定长拉扯传输;
故而,当进行一卷载带的成型加工时,仅需要首先将安装有加工模的模架一、模架二和模架三以横架杆上的锁定位为基准进行定位后,并与横架杆进行位置锁定,且滑动轨夹一、滑动轨夹二和滑动轨夹三滑移至紧挨固定轨夹的并排位置,形成工作的初始位,进而人工仅需要将载带首段两侧限位在固定轨夹、滑动轨夹一、滑动轨夹二和滑动轨夹三的夹口之间,并控制夹紧定位,使得可以通过控制滑动轨夹一、滑动轨夹二和滑动轨夹三的移动,来带动载带首段依次经由模架一、模架二和模架三的加工工序加工后进入到收卷载带区,即可完成自载带首段即可进行的自动化输送加工效果,且载带首段遗留的加工空白区也更小,传输单元与各个加工单元之间的位置确定也更加简单方便,同时往复活动夹在载带首段加工时即可具有定长的拉扯定位效果,且定长拉扯精度也更高,从而可避免不同加工工序之间的加工对位误差。
优选的,为了使得横架杆锁定位与模架一、模架二和模架三的支撑导柱之间对位安装更加快捷方便,故而可设置在支撑导柱上贯通设置有对位插槽一,横架杆的锁定位上贯通设置有与对位插槽一对位的对位插槽二,且对位插槽一和对位插槽二内插设有一组用于锁定横架杆纵向位置的定位插件,定位插件的一端设置有抵接在横架杆端部的封块,且另一端设置有锁螺纹杆,锁螺母连接在锁螺纹杆外用于将横架杆与支撑导柱纵向位置锁定,且横架杆锁定位的一侧还设置有纵向滑动连接在支撑导柱外的导柱滑块,导柱滑块内设置有纵向滑动连接在支撑导柱外的导柱滑槽。
优选的,为了确保往复活动夹往复运动的稳定性效果,故而可设置连接件沿横向滑动连接在横架杆内,且两组固定夹之间还连接有一组导向穿过往复活动夹用的连接杆,且同时为了达到滑动轨夹一、滑动轨夹二和滑动轨夹三滑动的稳定性和精度的要求,故而可设置横架杆上开设有分别供滑动轨夹一、滑动轨夹二和滑动轨夹三的滑动安装端滑动连接的滑动槽,滑动槽内安装有由丝杠电机驱动的丝杆,且滑动安装端分别螺纹连接在对应的丝杆外,且横架杆上还开设有一组导向槽,滑动轨夹一、滑动轨夹二和滑动轨夹三的滑动安装端还设置有滑动连接在导向槽内的导向块,从而可进一步实现滑动轨夹一、滑动轨夹二和滑动轨夹三滑动的稳定性。
优选的,固定轨夹、滑动轨夹一、滑动轨夹二、固定夹和往复活动夹的夹持端设置有U形开口的夹口,且夹持端上还安装有一组夹持缸,夹持缸的驱动端穿入夹口中与一组夹持板相连,夹持板与夹口的一侧相对用于夹持定位经过其中的载带,且往复活动夹中的夹持板上还设置有多组卡柱,夹口的一侧设置有与卡柱对应的卡槽,滑动轨夹三定位于模架三一侧时,往复活动夹往复在固定夹之间,其内部的卡柱穿过载带的边侧开孔,用于卡紧载带进行定长的拉扯传输,从而可确保载带的后续加工过程中,能够避免夹持端松弛导致的载带拉扯滑动,不同加工工位处的加工对位出错。
优选的,为了确保能够实现对于不同宽度载带的夹持,故而可设置固定轨夹、滑动轨夹一、滑动轨夹二、固定夹和往复活动夹中的安装部与对应的夹持端可拆卸连接,且用于定位夹持端安装在横架杆上,其内转动连接有由调整电机驱动的转动杆,夹持端螺纹连接在转动杆外,且其上还设置有两组导向连接在安装部导套内的导杆,并通过旋转转动杆来控制两组相对设置的固定轨夹、滑动轨夹一、滑动轨夹二、固定夹和往复活动夹相对运动。
优选的,往复活动夹的夹持端还包括有横向上弹性连接的开口部和连接部,夹口设置在开口部的一侧,其另一侧设置有连接滑槽口,连接部的端部设置有横向滑动连接在连接滑槽口内的连接滑块,且连接滑块的两侧设置有抵接在连接滑槽口内的抵接弹簧,且固定夹的一侧还设置有用于与往复活动夹抵接撞击用的撞块面,故而,当丝杠电机启动带动丝杆旋转时,动力设备的传动力经由连接部传递给开口部时,首先可具有一个弹性的缓冲,即,开口部夹持载带定长输送时,由静止至运动的过程是一个弹性的过程,此时可降低对于动力设备的损耗,其次,通过设置在固定夹侧面的撞块面,即可表示,当往复活动夹的往复运动长度即为两组固定夹之间的定长,往复活动夹运动到位即会与固定夹的撞块面对撞停止,对撞虽然能够确保每次传输的定长精度准确,但是频繁的对撞中,动力设备发生突然的暂停,而微小的持续运动也会导致对于固定架一个横向上的刚性的冲击力,进而频繁的引发固定夹的变形,从而影响往复活动夹的运动精度,而通过横向上抵接弹簧的设置,当往复活动夹夹持载带运动至一侧的固定夹发生对撞抵接时,此时由于与动力设备刚性连接的连接部与开口部之间为一个横向上的弹性连接,故而动力设备可有一个缓冲的暂停时间,在此暂停时间内,载带被开口夹夹持位置不变,但动力设备可能会发生的暂停延迟,会驱动连接部横向持续运动一定的缓冲距离,此时抵接弹簧被压缩,来消除动力设备的突然暂停造成的冲击力,做到对于动力设备和固定夹的双重保护效果,同时上述中固定夹作为往复活动夹的两端的活动限位块,也使得定长拉扯精度也更高,从而可避免不同加工工序之间的加工对位误差。
优选的,为了后续的维护调整,支撑导柱的顶端与上架板之间通过螺栓定位连接,且其底端焊接固定在下架板上。
一种载带成型机的成型工作方法,基于上述的一种载带成型机,包括如下步骤:
S1:首先将安装有加工模的模架一、模架二和模架三以横架杆上的锁定位为基准进行定位后,并与横架杆进行位置锁定,且滑动轨夹一、滑动轨夹二和滑动轨夹三滑移至紧挨固定轨夹的并排位置,形成工作的初始位;
S2:进而将载带首段限位在固定轨夹、滑动轨夹一、滑动轨夹二和滑动轨夹三的夹口之间,滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹对载带进行夹紧定位,滑动轨夹三的往复活动夹保持松开载带状态,横向运动定长距离后抵靠在远离固定轨夹一端的固定夹侧,再启动滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹同步沿横架杆横向运动,同时启动滑动轨夹三的往复活动夹相对滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹反向同步运动,直至滑动轨夹三的往复活动夹与靠近固定轨夹一端的固定夹抵靠对接,此时第一组载带的定长距离传输停止,且由于往复活动夹和固定夹的反向同步运动,故而可确保在传输定长距离后运动的停止,即,对撞导致运动无法继续,此时在对于载带首段传输时,亦能够确保定长运动的精度;
S3:S2中载带首段经第一组定长距离传输至模架一中,并经由载带两侧的加热模进行加热,且在加热工序完成后,滑动轨夹三的往复活动夹再次横向运动定长距离抵靠在远离固定轨夹一端的固定夹侧,进而再启动滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹同步沿横架杆横向运动,同时启动滑动轨夹三的往复活动夹相对滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹反向同步运动,直至滑动轨夹三的往复活动夹与靠近固定轨夹一端的固定夹抵靠对接,此时第二组载带的定长距离传输停止;
S4:S3中载带首段经第二组定长距离传输至模架二中,并经由载带两侧的加热模和成型模进行加热和成型,且在加热和成型的工序均已完成后,滑动轨夹三的往复活动夹再次横向运动定长距离抵靠在远离固定轨夹一端的固定夹侧,进而再启动滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹同步沿横架杆横向运动,同时启动滑动轨夹三的往复活动夹相对滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹反向同步运动,直至滑动轨夹三的往复活动夹与靠近固定轨夹一端的固定夹抵靠对接,此时第三组载带的定长距离传输停止,且滑动轨夹一运动至模架一、模架二之间,定位暂停;
S5:S4中载带首段经第三组定长距离传输至模架三中,并经由载带两侧的加热模和成型模持续进行加热和成型,而运动至模架三中的载带,由于滑动轨夹三亦处于模架三中,因此则首段上空余一组已加热成型的载带区不打孔,且在加热和成型的工序均已完成后,滑动轨夹三的往复活动夹再次横向运动定长距离抵靠在远离固定轨夹一端的固定夹侧,进而再启动滑动轨夹二和滑动轨夹三的固定夹同步沿横架杆横向运动,同时启动滑动轨夹三的往复活动夹相对滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹反向同步运动,直至滑动轨夹三的往复活动夹与靠近固定轨夹一端的固定夹抵靠对接,此时第四组载带的定长距离传输停止,且滑动轨夹二运动至模架二、模架三之间,定位暂停;
S6:S5中载带首段经第四组定长距离传输至模架三远离模架二的一侧,并经由载带两侧的加热模和成型模持续进行加热和成型,而运动至模架三中的载带,由于滑动轨夹三亦处于模架三中,因此则首段上空余一组已加热成型的载带区不打孔,且在加热和成型的工序均已完成后,滑动轨夹三的往复活动夹再次横向运动定长距离抵靠在远离固定轨夹一端的固定夹侧,进而再启动滑动轨夹二和滑动轨夹三的固定夹同步沿横架杆横向运动,同时启动滑动轨夹三的往复活动夹相对滑动轨夹一、滑动轨夹二和滑动轨夹三的固定夹反向同步运动,直至滑动轨夹三的往复活动夹与靠近固定轨夹一端的固定夹抵靠对接,此时第五组载带的定长距离传输停止,且滑动轨夹三运动至模架三的一侧,定位暂停,再次进行定长距离传输,则由往复活动夹往返运动在两组固定夹之间进行载带定长的传输,且传输过程中加热模、成型模和冲孔针模对于载带进行加热、成型和打孔的工艺,直至载带加工完成,进行新的一组载带进行更换时,则滑动轨夹一、滑动轨夹二和滑动轨夹三再次返回至工作的初始位。
本发明的有益效果是:
1、通过设置横架杆与模架一、模架二和模架三中支撑导柱锁定位配合的结构,故而可通过预设的锁定位即可快速确定模架一、模架二和模架三的水平固定间距,且在模架一、模架二、模架三位置固定后,横架杆的位置自然确定并与模架一、模架二和模架三的位置进行快速锁定,使得传输单元与各个加工单元之间的位置确定更加简单方便;
2、在本发明中,在工作的初始位确定后,即可将载带首段两侧限位在固定轨夹、滑动轨夹一、滑动轨夹二和滑动轨夹三的夹口之间,并控制夹紧定位,使得可以通过控制滑动轨夹一、滑动轨夹二和滑动轨夹三的移动,来带动载带首段依次经由模架一、模架二和模架三的加工工序加工后进入到收卷载带区,即可完成自载带首段即可进行的自动化输送加工效果,且载带首段遗留的加工空白区也更小,传输单元与各个加工单元之间的位置确定也更加简单方便,同时往复活动夹在载带首段加工时即可具有定长的拉扯定位效果,且定长拉扯精度也更高,从而可避免不同加工工序之间的加工对位误差。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
图1是本发明横架杆结构在模架一、模架二、和模架三之间位置示意分布的俯视结构示意图;
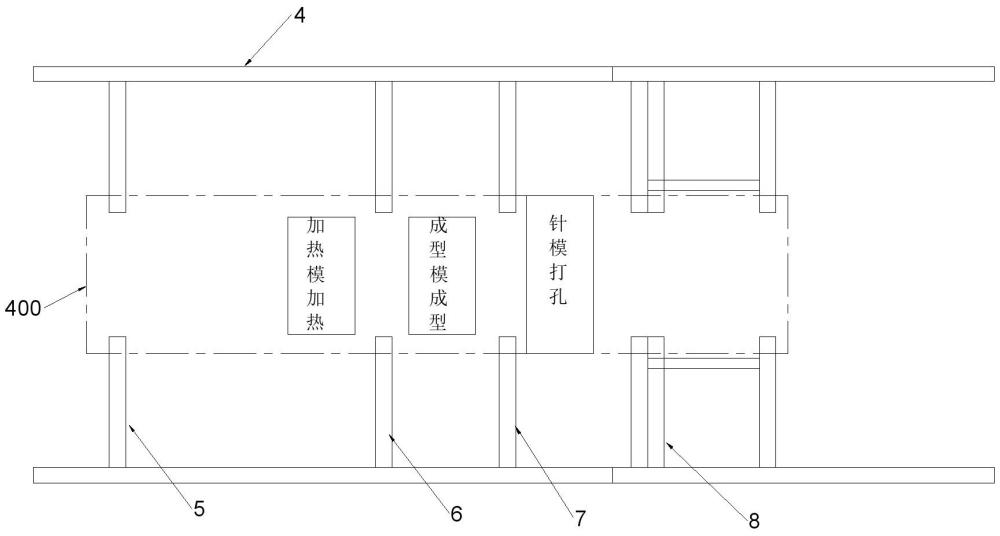
图2是本发明的主视剖面示意图;
图3是两组横架杆结构的俯视示意图;
图4是固定夹在横架杆上结构的侧视结构示意图;
图5是往复活动夹中开口部和连接部配合的俯视剖面结构示意图;
图6是步骤S2中固定轨夹、滑动轨夹一、滑动轨夹二、滑动轨夹三位置的俯视结构示意图;
图7是步骤S3中固定轨夹、滑动轨夹一、滑动轨夹二、滑动轨夹三位置变化的流程示意图;
图8是步骤S4中固定轨夹、滑动轨夹一、滑动轨夹二、滑动轨夹三位置变化的流程示意图;
图9是步骤S5中固定轨夹、滑动轨夹一、滑动轨夹二、滑动轨夹三位置变化的流程示意图;
图10是步骤S6中固定轨夹、滑动轨夹一、滑动轨夹二、滑动轨夹三位置变化的流程示意图;
图中的标记:1为模架一,2为模架二,3为模架三,4为横架杆,5为固定轨夹,6为滑动轨夹一,7为滑动轨夹二,8为滑动轨夹三,
100为上架板,200为下架板,300为支撑导柱,400为载带,
81为固定夹,82为往复活动夹,83为连接件,84为螺杆,85为连接杆,86为丝杆,87为导向槽,88为导向块,
41为对位插槽一,42为对位插槽二,43为定位插件,44为封块,45为锁螺纹杆,46为导柱滑块,
91为夹口,92为夹持缸,93为夹持板,94为卡槽,95为转动杆,96为导杆,97为导套,
821为开口部,822为连接部,823为连接滑槽口,824为连接滑块,825为抵接弹簧,826为撞块面。
具体实施方式
实施例1
如图1-9所示,一种载带成型机,在本实施例中,包括模架一1、模架二2、模架三3和传输单元,传输单元用于传输载带400依次经过模架一1、模架二2和模架三3,模架一1用于安装加热模来对经过其中的载带400进行加热,模架二2用于安装成型模来对经过其中的载带400进行冲压成型,模架三3用于安装冲孔针模来对经过其中的载带400进行打孔,模架一1、模架二2和模架三3均包括有上架板100、下架板200和支撑定位在上架板100和下架板200之间且呈矩形分布的四组支撑导柱300,传输单元包括两组平行设置且横向穿过模架一1、模架二2和模架三3的横架杆4,横架杆4上横向分布有用于与模架一1、模架二2和模架三3的支撑导柱300依次对位锁定的锁定位,此时通过预设的锁定位即可确定模架一1、模架二2和模架三3的水平固定间距,且在模架一1、模架二2、模架三3位置固定后,横架杆4的位置自然确定并与模架一1、模架二2和模架三3的位置进行锁定;
横架杆4上沿横向依次分布有固定轨夹5、滑动轨夹一6、滑动轨夹二7和滑动轨夹三8,两组横架杆4上相对设置的固定轨夹5定位于模架一1的一侧,两组横架杆4上相对设置的滑动轨夹一6用于夹持载带400首段两侧由靠近固定轨夹5的一端经过模架一1后定位于模架一1、模架二2之间,两组横架杆4上相对设置的滑动轨夹二7用于夹持载带400首段两侧由靠近固定轨夹5的一端经过模架一1、模架二2后定位于模架二2、模架三3之间,两组横架杆4上相对设置的滑动轨夹三8用于夹持载带400首段两侧由靠近固定轨夹5的一端依次经过模架一1、模架二2和模架三3后定位于模架三3一侧,
滑动轨夹三8包括两组固定夹81和一组位于固定夹81之间的往复活动夹82,两组固定夹81之间通过连接件83固定相连,连接件83的横向开槽内安装有与往复活动夹82的螺母块螺纹连接的螺杆84,螺杆84由往复电机驱动,且用于带动往复活动夹82在两组固定夹81之间做直线往复运动,来控制载带400的定长拉扯传输;
故而,当进行一卷载带400的成型加工时,仅需要首先将安装有加工模的模架一1、模架二2和模架三3以横架杆4上的锁定位为基准进行定位后,并与横架杆4进行位置锁定,且滑动轨夹一6、滑动轨夹二7和滑动轨夹三8滑移至紧挨固定轨夹5的并排位置,形成工作的初始位,进而人工仅需要将载带400首段两侧限位在固定轨夹5、滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的夹口91之间,并控制夹紧定位,使得可以通过控制滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的移动,来带动载带400首段依次经由模架一1、模架二2和模架三3的加工工序加工后进入到收卷载带400区,即可完成自载带400首段即可进行的自动化输送加工效果,且载带400首段遗留的加工空白区也更小,传输单元与各个加工单元之间的位置确定也更加简单方便,同时往复活动夹82在载带400首段加工时即可具有定长的拉扯定位效果,且定长拉扯精度也更高,从而可避免不同加工工序之间的加工对位误差。
为了使得横架杆4锁定位与模架一1、模架二2和模架三3的支撑导柱300之间对位安装更加快捷方便,故而可设置在支撑导柱300上贯通设置有对位插槽一41,横架杆4的锁定位上贯通设置有与对位插槽一41对位的对位插槽二42,且对位插槽一和对位插槽二内插设有一组用于锁定横架杆4纵向位置的定位插件43,定位插件43的一端设置有抵接在横架杆4端部的封块44,且另一端设置有锁螺纹杆45,锁螺母连接在锁螺纹杆45外用于将横架杆4与支撑导柱300纵向位置锁定,且横架杆4锁定位的一侧还设置有纵向滑动连接在支撑导柱300外的导柱滑块46,导柱滑块46内设置有纵向滑动连接在支撑导柱300外的导柱滑槽。
为了确保往复活动夹82往复运动的稳定性效果,故而可设置连接件83沿横向滑动连接在横架杆4内,且两组固定夹81之间还连接有一组导向穿过往复活动夹82用的连接杆85,且同时为了达到滑动轨夹一6、滑动轨夹二7和滑动轨夹三8滑动的稳定性和精度的要求,故而可设置横架杆4上开设有分别供滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的滑动安装端滑动连接的滑动槽,滑动槽内安装有由丝杠电机驱动的丝杆86,且滑动安装端分别螺纹连接在对应的丝杆86外,且横架杆4上还开设有一组导向槽87,滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的滑动安装端还设置有滑动连接在导向槽87内的导向块88,从而可进一步实现滑动轨夹一6、滑动轨夹二7和滑动轨夹三8滑动的稳定性。
固定轨夹5、滑动轨夹一6、滑动轨夹二7、固定夹81和往复活动夹82的夹持端设置有U形开口的夹口91,且夹持端上还安装有一组夹持缸92,夹持缸92的驱动端穿入夹口91中与一组夹持板93相连,夹持板93与夹口91的一侧相对用于夹持定位经过其中的载带400,且往复活动夹82中的夹持板93上还设置有多组卡柱,夹口91的一侧设置有与卡柱对应的卡槽94,滑动轨夹三8定位于模架三3一侧时,往复活动夹82往复在固定夹81之间,其内部的卡柱穿过载带400的边侧开孔伸入至卡槽中,用于卡紧载带400进行定长的拉扯传输,从而可确保载带400的后续加工过程中,能够避免夹持端松弛导致的载带400拉扯滑动,不同加工工位处的加工对位出错。
为了确保能够实现对于不同宽度载带400的夹持,故而可设置固定轨夹5、滑动轨夹一6、滑动轨夹二7、固定夹81和往复活动夹82中的安装部与对应的夹持端可拆卸连接,且用于定位夹持端安装在横架杆4上,其内转动连接有由调整电机驱动的转动杆95,夹持端螺纹连接在转动杆95外,且其上还设置有两组导向连接在安装部导套97内的导杆96,并通过旋转转动杆95来控制两组相对设置的固定轨夹5、滑动轨夹一6、滑动轨夹二7、固定夹81和往复活动夹82相对运动。
往复活动夹82的夹持端还包括有横向上弹性连接的开口部821和连接部822,夹口91设置在开口部821的一侧,其另一侧设置有连接滑槽口823,连接部822的端部设置有横向滑动连接在连接滑槽口823内的连接滑块824,且连接滑块824的两侧设置有抵接在连接滑槽口823内的抵接弹簧825,且固定夹81的一侧还设置有用于与往复活动夹82抵接撞击用的撞块面826,故而,当丝杠电机启动带动丝杆86旋转时,动力设备的传动力经由连接部822传递给开口部821时,首先可具有一个弹性的缓冲,即,开口部821夹持载带400定长输送时,由静止至运动的过程是一个弹性的过程,此时可降低对于动力设备的损耗,其次,通过设置在固定夹81侧面的撞块面826,即可表示,当往复活动夹82的往复运动长度即为两组固定夹81之间的定长,往复活动夹82运动到位即会与固定夹81的撞块面826对撞停止,对撞虽然能够确保每次传输的定长精度准确,但是频繁的对撞中,动力设备发生突然的暂停,而微小的持续运动也会导致对于固定架一个横向上的刚性的冲击力,进而频繁的引发固定夹81的变形,从而影响往复活动夹82的运动精度,而通过横向上抵接弹簧825的设置,当往复活动夹82夹持载带400运动至一侧的固定夹81发生对撞抵接时,此时由于与动力设备刚性连接的连接部822与开口部821之间为一个横向上的弹性连接,故而动力设备可有一个缓冲的暂停时间,在此暂停时间内,载带400被开口夹夹持位置不变,但动力设备可能会发生的暂停延迟,会驱动连接部822横向持续运动一定的缓冲距离,此时抵接弹簧825被压缩,来消除动力设备的突然暂停造成的冲击力,做到对于动力设备和固定夹81的双重保护效果,同时上述中固定夹81作为往复活动夹82的两端的活动限位块,也使得定长拉扯精度也更高,从而可避免不同加工工序之间的加工对位误差。
为了后续的维护调整,支撑导柱300的顶端与上架板100之间通过螺栓定位连接,且其底端焊接固定在下架板200上。
实施例2
一种载带成型机的成型工作方法,基于上述的一种载带成型机,包括如下步骤:
S1:首先将安装有加工模的模架一1、模架二2和模架三3以横架杆4上的锁定位为基准进行定位后,并与横架杆4进行位置锁定,且滑动轨夹一6、滑动轨夹二7和滑动轨夹三8滑移至紧挨固定轨夹5的并排位置,形成工作的初始位;
S2:进而将载带400首段限位在固定轨夹5、滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的夹口91之间,滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81对载带400进行夹紧定位,滑动轨夹三8的往复活动夹82保持松开载带400状态,横向运动定长距离后抵靠在远离固定轨夹5一端的固定夹81侧,再启动滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81同步沿横架杆4横向运动,同时启动滑动轨夹三8的往复活动夹82相对滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81反向同步运动,直至滑动轨夹三8的往复活动夹82与靠近固定轨夹5一端的固定夹81抵靠对接,此时第一组载带400的定长距离传输停止,且由于往复活动夹82和固定夹81的反向同步运动,故而可确保在传输定长距离后运动的停止,即,对撞导致运动无法继续,此时在对于载带400首段传输时,亦能够确保定长运动的精度;
S3:S2中载带400首段经第一组定长距离传输至模架一1中,并经由载带400两侧的加热模进行加热,且在加热工序完成后,滑动轨夹三8的往复活动夹82再次横向运动定长距离抵靠在远离固定轨夹5一端的固定夹81侧,进而再启动滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81同步沿横架杆4横向运动,同时启动滑动轨夹三8的往复活动夹82相对滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81反向同步运动,直至滑动轨夹三8的往复活动夹82与靠近固定轨夹5一端的固定夹81抵靠对接,此时第二组载带400的定长距离传输停止;
S4:S3中载带400首段经第二组定长距离传输至模架二2中,并经由载带400两侧的加热模和成型模进行加热和成型,且在加热和成型的工序均已完成后,滑动轨夹三8的往复活动夹82再次横向运动定长距离抵靠在远离固定轨夹5一端的固定夹81侧,进而再启动滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81同步沿横架杆4横向运动,同时启动滑动轨夹三8的往复活动夹82相对滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81反向同步运动,直至滑动轨夹三8的往复活动夹82与靠近固定轨夹5一端的固定夹81抵靠对接,此时第三组载带400的定长距离传输停止,且滑动轨夹一6运动至模架一1、模架二2之间,定位暂停;
S5:S4中载带400首段经第三组定长距离传输至模架三3中,并经由载带400两侧的加热模和成型模持续进行加热和成型,而运动至模架三3中的载带400,由于滑动轨夹三8亦处于模架三3中,因此则首段上空余一组已加热成型的载带400区不打孔,且在加热和成型的工序均已完成后,滑动轨夹三8的往复活动夹82再次横向运动定长距离抵靠在远离固定轨夹5一端的固定夹81侧,进而再启动滑动轨夹二7和滑动轨夹三8的固定夹81同步沿横架杆4横向运动,同时启动滑动轨夹三8的往复活动夹82相对滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81反向同步运动,直至滑动轨夹三8的往复活动夹82与靠近固定轨夹5一端的固定夹81抵靠对接,此时第四组载带400的定长距离传输停止,且滑动轨夹二7运动至模架二2、模架三3之间,定位暂停;
S6:S5中载带400首段经第四组定长距离传输至模架三3远离模架二2的一侧,并经由载带400两侧的加热模和成型模持续进行加热和成型,而运动至模架三3中的载带400,由于滑动轨夹三8亦处于模架三3中,因此则首段上空余一组已加热成型的载带400区不打孔,且在加热和成型的工序均已完成后,滑动轨夹三8的往复活动夹82再次横向运动定长距离抵靠在远离固定轨夹5一端的固定夹81侧,进而再启动滑动轨夹二7和滑动轨夹三8的固定夹81同步沿横架杆4横向运动,同时启动滑动轨夹三8的往复活动夹82相对滑动轨夹一6、滑动轨夹二7和滑动轨夹三8的固定夹81反向同步运动,直至滑动轨夹三8的往复活动夹82与靠近固定轨夹5一端的固定夹81抵靠对接,此时第五组载带400的定长距离传输停止,且滑动轨夹三8运动至模架三3的一侧,定位暂停,再次进行定长距离传输,则由往复活动夹82往返运动在两组固定夹81之间进行载带400定长的传输,且传输过程中加热模、成型模和冲孔针模对于载带400进行加热、成型和打孔的工艺,直至载带400加工完成,进行新的一组载带400进行更换时,则滑动轨夹一6、滑动轨夹二7和滑动轨夹三8再次返回至工作的初始位。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种全自动一体式纸浆模塑成型机及其工作方法
- 一种轮胎成型机自动带束层供料装置布局
- 一种成型半导体载带自动化载带成型机
- 一种高速粒子载带成型机成型机构高度可调装置