一种紧凑式扁平型的大行程夹爪
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及机械夹爪技术领域,尤其涉及一种紧凑式扁平型的大行程夹爪。
背景技术
随着锂电池行业的发展,针对锂电池夹取的工艺生产线上需要更大行程的紧凑式扁平型的大行程夹爪,夹爪的内部结构的分布对夹爪的行程大小具有很大的影响。在外形尺寸限制的前提下,如何实现夹爪行程的最大化,成为本行业亟需解决的难题。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明提出一种紧凑式扁平型的大行程夹爪。
本发明实施例提供了一种紧凑式扁平型的大行程夹爪,所述紧凑式扁平型的大行程夹爪包括:
壳体,所述壳体上端面设有两个沿左右方向延伸的导轨,两个所述导轨均滑动连接有指端组件,两个所述指端组件的相向面设有齿条,所述齿条沿左右方向延伸,两个所述指端组件之间设有第一齿轮,所述第一齿轮分别与两个所述指端组件的所述齿条啮合连接;
驱动组件,设于所述壳体内,所述驱动组件与其中一个所述指端组件连接,所述驱动组件用于驱动其中一个所述指端组件滑动以使两个所述指端组件相互靠近或分离;
控制板,设于所述壳体内且位于所述驱动组件的一侧,所述控制板与所述驱动组件电连接。
根据本发明实施例的紧凑式扁平型的大行程夹爪,至少具有如下技术效果:驱动组件带动其中一个指端组件滑动时,该指端组件的齿条在跟随滑动的过程中带动第一齿轮转动,从而使得另一个指端组件的齿条往相反方向滑动,使得两个指端组件能够相互靠近或分离;导轨与齿条、第一齿轮的配合传动能够使得结构更为紧凑,在有限的尺寸下得到更大的行程。
根据本发明的一些实施例,所述驱动组件包括驱动电机和丝杆,所述驱动电机、所述丝杆和所述导轨相互平行,所述丝杆上安装有螺母座,所述螺母座与其中一个所述齿条固定连接,所述驱动电机用于驱动所述丝杆转动以带动两个所述指端组件相互靠近或分离。
根据本发明的一些实施例,所述驱动电机的驱动端位于所述驱动电机本体的右侧,所述壳体内设有轴承座,所述丝杆穿设并转动连接于所述轴承座,所述驱动电机的驱动端与所述丝杆通过连接组件连接。
根据本发明的一些实施例,所述连接组件包括第一同步轮、第二同步轮以及同步带,所述第一同步轮套设并固定连接于所述驱动电机的驱动端,所述第二同步轮套设并固定连接于所述丝杆,所述同步带同时套设于所述第一同步轮和所述第二同步轮。
根据本发明的一些实施例,所述连接组件包括第二齿轮、第三齿轮和第四齿轮,所述第二齿轮套设并固定连接于所述驱动电机的驱动端,所述第三齿轮套设并固定连接于所述丝杆,所述第四齿轮分别与所述第二齿轮和所述第三齿轮啮合。
根据本发明的一些实施例,所述控制板位于所述驱动电机的左侧,所述控制板与所述驱动电机连接以控制所述驱动电机转动。
根据本发明的一些实施例,所述驱动电机的最左端位于所述丝杆的最左端的左侧。
根据本发明的一些实施例,所述指端组件包括滑块和夹爪安装板,所述滑块与所述导轨滑动连接,所述夹爪安装板固定安装于所述滑块,所述夹爪安装板用于连接夹爪。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
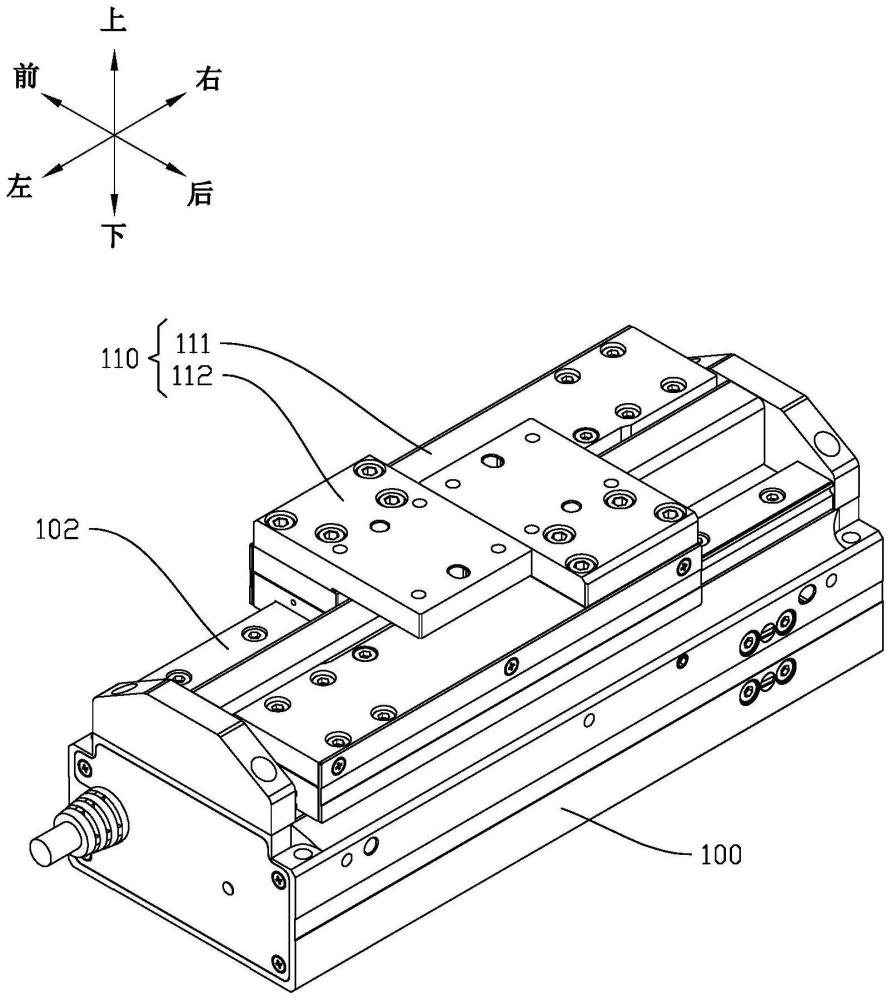
图1是本发明一些实施例的紧凑式扁平型的大行程夹爪的结构示意图;
图2是本发明一些实施例的紧凑式扁平型的大行程夹爪的剖视图;
图3是本发明一些实施例的部分紧凑式扁平型的大行程夹爪的结构示意图;
图4是本发明一些实施例的部分紧凑式扁平型的大行程夹爪的俯视图;
图5是本发明一些实施例的驱动组件的结构示意图;
图6是本发明一些实施例的壳体的结构示意图;
图7是本发明一些实施例的另一种紧凑式扁平型的大行程夹爪的部分结构示意图。
附图标号:
壳体100、轴承座101、导轨102、指端组件110、滑块111、夹爪安装板112、齿条120、第一齿轮130;
驱动组件200、驱动电机210、丝杆220、螺母座221;
连接组件300、第一同步轮310、第二同步轮320、同步带330、第二齿轮340、第三齿轮350、第四齿轮360;
控制板400。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
下面结合附图,对本发明实施例作进一步阐述。
根据本发明的一些实施例,参照图1至图4,紧凑式扁平型的大行程夹爪包括壳体100、驱动组件200和控制板400。壳体100的上端面设有两个导轨102,导轨102沿左右方向延伸,两个导轨102沿前后方向间隔排列。两个导轨102均滑动连接有指端组件110,两个指端组件110的相向面设有齿条120,即位于前侧的指端组件110的后侧面设有齿条120,而位于后侧的指端组件110的前侧面设有齿条120。齿条120沿左右方向延伸,两个指端组件110之间设有第一齿轮130,第一齿轮130分别与两个指端组件110的齿条120啮合连接。驱动组件200设于壳体100内,驱动组件200与位于后侧的指端组件110连接,当驱动组件200驱动位于后侧的指端组件110滑动时,两个指端组件110相互靠近或分离。控制板400设于壳体100内且位于驱动组件200的左侧,控制板400与驱动组件200电连接。
可以理解的是,当驱动组件200带动位于后侧的指端组件110沿左右方向滑动时,该指端组件110的齿条120在跟随滑动的过程中带动第一齿轮130转动,从而使得第一齿轮130带动另一个指端组件110的齿条120往相反方向滑动,两个齿条120往相反方向滑动,从而使得两个指端组件110能够相互靠近或分离。导轨102与齿条120、第一齿轮130的配合传动能够使得结构更为紧凑,在有限的尺寸下得到更大的行程。
根据本发明的一些实施例,参照图2至图5,驱动组件200包括驱动电机210和丝杆220,驱动电机210、丝杆220和导轨102相互平行,驱动电机210为无刷电机,驱动电机210呈筒状,驱动电机210的轴线方向沿左右方向,而丝杆220位于电机的后侧,丝杆220上安装有螺母座221,螺母座221与位于后侧的齿条120固定连接,驱动电机210用于驱动丝杆220转动,带动螺母座221沿左右方向移动,以带动两个指端组件110相互靠近或分离。
需要说明的是,驱动部件200实现模块化制造和装配,在此基础上设计的壳体100结构简化,而模块化制造的驱动部件200和壳体100能够降低制造装配的成本,使得整体的紧凑式扁平型的大行程夹爪能够增大行程的同时降低制造成本。
根据本发明的一些实施例,参照图5和图6,驱动电机210的驱动端位于驱动电机210本体的右侧,壳体100内设有轴承座101,丝杆220穿设并转动连接于轴承座101,驱动电机210的驱动端与丝杆220的右端通过连接组件300连接。
可以理解的是,驱动电机210与丝杆220的轴线均为左右方向,两者的平行分布能够充分利用壳体100内的空间,驱动电机210的右端与丝杆220的右端对齐且贴近于壳体100内腔的右侧壁,使得壳体100内腔的左侧能够留有较大的区域以安装控制板400。
优选的,参照图6和图7,丝杆220通过轴承座101安装于壳体100内,丝杆220的左端为悬空状,以减少材料成本。
优选的,参照图5,连接组件300包括第一同步轮310、第二同步轮320以及同步带330,第一同步轮310套设并固定连接于驱动电机210的驱动端,第二同步轮320套设并固定连接于丝杆220,同步带330同时套设于第一同步轮310和第二同步轮320。
优选的,参照图7,连接组件300包括第二齿轮340、第三齿轮350和第四齿轮360,第二齿轮340套设并固定连接于驱动电机210的驱动端,第三齿轮350套设并固定连接于丝杆220,第四齿轮360分别与第二齿轮340和第三齿轮350啮合。
根据本发明的一些实施例,参照图2,控制板400位于驱动电机210的左侧,控制板400与驱动电机210连接以控制驱动电机210转动。
需要说明的是,由于驱动电机210和丝杆220右对齐且贴近于壳体100内腔的右侧壁,使得壳体100内腔的左端具有足够的容纳区域以放置控制板400,进而提高壳体100内腔的空间利用率。
根据本发明的一些实施例,驱动电机210的最左端位于丝杆220的最左端的左侧,即壳体100内腔内的存在着同时位于丝杆220左侧且位于驱动电机210后侧的容纳区域。
需要说明的是,在紧凑式扁平型的大行程夹爪的行程量一定的情况下,控制板400和驱动组件200的体积以及排布对紧凑式扁平型的大行程夹爪的体积具有很大的影响。通常,安装在壳体100内腔后的控制板400和驱动组件200的沿左右方向的总长度,该总长度比导轨102沿左右方向延伸的长度更长,使得壳体100需要更大的体积以适应控制板400以及驱动组件200,即导轨102的长度通常比壳体100的长度短。
可以理解的是,本实施例中的壳体100内腔内的存在着同时位于丝杆220左侧且位于驱动电机210后侧的容纳区域,使得控制板400的形状能够适应于该容纳区域,以减小壳体100沿左右方向的尺寸,使得导轨102的长度更加接近于壳体100的长度,使得紧凑式扁平型的大行程夹爪的结构更加紧凑。
根据本发明的一些实施例,参照图1,指端组件110包括滑块111和夹爪安装板112,滑块111与导轨102滑动连接,夹爪安装板112固定安装于滑块111,夹爪安装板112用于连接夹爪。
在本说明书的描述中,参考术语“一些实施例”的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种紧凑型大视场互嵌式全反射光学系统
- 一种用于链条驱动式夹爪系统的张紧装置
- 一种行程快速可调的夹指型气动夹爪
- 一种行程快速可调的夹指型电动夹爪