一种双转铰节连接的模板台车
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及土木工程技术领域,尤其涉及一种双转铰节连接的模板台车。
背景技术
模板台车广泛应用于水利、铁路、公路隧道箱涵等暗挖工程,需要用到浇筑方法进行施工,先利用桁架与隧道内的土墙或事先修筑后的围墙构成模腔,在施工过程中,先立主体框架,然后通过油缸来支撑侧模板,完成撑模过程,且在浇筑完成后,需要进行脱模操作,而传统的模板台车在脱模时需要将模板拆卸,容易对已经成型凝固的混凝土面造成碰撞,从而损坏,为解决这一问题,现有的模板台车通过设置液压缸带动模板自动伸缩撑模或脱模,既减少了模板对侧壁或台车桁架支腿的碰撞风险,又减少了模板拆卸所需要的工序,提高了施工效率。
中国专利公开号:CN114876518A,公开了一种可分体式任意变截面模板台车及其施工方法,其技术点是提供了一种可分体式任意变截面模板台车,适应任意不同断面的隧道以完成施工贴合隧道;由此可见,在现有技术中的模板台车不能实时监测撑模进程,需要操作人员在施工现场监测分析,过程复杂且缺乏安全性。
发明内容
为此,本发明提供一种双转铰节连接的模板台车,用以克服现有技术中自动模板台车缺乏实时监测撑模,导致撑模施工效果差的问题。
为实现上述目的,本发明提供一种双转铰节连接的模板台车,包括,
台车主桁架,其为所述模板台车的主体框架,所述台车主桁架一侧上部设置有右倾斜角度检测仪,同一侧下部设置有位移传感器,所述右倾斜角度检测仪用以检测台车主桁架的台车实时倾斜角度,所述位移传感器用以检测台车主桁架的实时横向位移,所述台车主桁架上还设置有报警指示灯;
上侧油缸,其设置在所述台车主桁架的一侧上部,且与转角模板相连,所述上侧油缸能够通过收缩或伸出带动所述转角模板脱模或撑模,上侧油缸与所述台车主桁架连接处设置有上侧应力检测装置,用以检测所述上侧油缸受到的实时上撑模应力;
下侧油缸,其设置在所述台车主桁架的一侧下部,且与侧模板相连,所述下侧油缸能够通过收缩或伸出带动所述侧模板脱模或撑模,下侧油缸与所述台车主桁架连接处设置有下侧应力检测装置,用以检测所述下侧油缸受到的实时下撑模应力;
所述侧模板上端通过侧双向转铰节与所述转角模板的一端相连,转角模板的另一端通过顶双向转铰节与顶模板相连,且侧模板内侧设置有左倾斜角度检测仪,用以检测侧模板的模板实时倾斜角度;
中控模块,其与所述右倾斜角度检测仪、所述左倾斜角度检测仪、所述位移传感器、所述上侧油缸、所述下侧油缸以及所述报警指示灯分别相连;所述中控模块根据标准下撑模应力对所述下侧油缸的实时下撑模应力进行判定,确定下侧油缸伸出是否正常,并在正常时根据标准上撑模应力对所述上侧油缸的实时上撑模应力进行判定,中控模块在实时上撑模应力未超出标准上撑模应力时,控制上侧油缸与下侧油缸完全伸出撑模,并控制所述报警指示灯进行一级闪烁提示,中控模块在实时上撑模应力已超出标准上撑模应力时,对台车实时倾斜角度进行判定,控制上侧油缸与下侧油缸停止伸出或持续伸出,并在上侧油缸与下侧油缸停止伸出时控制报警指示灯进行三级闪烁提示,在上侧油缸与下侧油缸持续伸出至完成撑模时,控制报警指示灯二级闪烁提示。
进一步地,所述中控模块内设置有标准下撑模应力Fb1,在所述模板台车进行撑模时,所述中控模块控制所述下侧油缸对所述下侧油缸进行伸出撑模,所述下侧应力检测装置将检测下侧油缸缸体一侧的实时下撑模应力Fs1传输至中控模块,中控模块将实时下撑模应力Fs1与标准下撑模应力Fb1进行对比,
当Fs1≤Fb1时,所述中控模块判定所述下侧油缸的实时下撑模应力未超出标准下撑模应力,判定下侧油缸伸出正常,中控模块将对所述上侧油缸的标准上撑模应力进行判定,以确定是否停止撑模;
当Fs1>Fb1时,所述中控模块判定所述下侧油缸的实时下撑模应力已超出标准下撑模应力,判定下侧油缸伸出异常,中控模块将对所述台车主桁架的横向位移进行判定,以确定是否停止撑模。
进一步地,所述中控模块内设置有标准上撑模应力Fb2,在所述中控模块判定所述下侧油缸的实时下撑模应力未超出标准下撑模应力时,所述上侧应力检测装置将检测上侧油缸缸体一侧的实时上撑模应力Fs2传输至中控模块,中控模块将实时上撑模应力Fs2与标准上撑模应力Fb2进行对比,
当Fs2≤Fb2时,所述中控模块判定所述上侧油缸的实时上撑模应力未超出标准上撑模应力,中控模块控制上侧油缸与下侧油缸持续伸出至完全伸出时,同时判定完成撑模,并控制所述报警指示灯进行一级闪烁提示,
当Fs2>Fb2时,所述中控模块判定所述上侧油缸的实时上撑模应力已超出标准上撑模应力,中控模块将对台车实时倾斜角度进行判定,以确定是否继续撑模。
进一步地,所述中控模块内设置有所述台车主桁架的标准倾斜角度Cb1,中控模块在第一预设条件下将所述右倾斜角度检测仪检测到的台车主桁架的台车实时倾斜角度Cs1与标准倾斜角度Cb1进行对比,
当Cs1≤Cb1时,所述中控模块判定台车实时倾斜角度未超出标准倾斜角度;中控模块控制上侧油缸与下侧油缸持续伸出,直至所述上侧油缸与下侧油缸完全伸出时,中控模块判定完成撑模,并进行模板实时倾斜角度的判定和控制所述报警指示灯二级闪烁提示;
当Cs1>Cb1时,所述中控模块判定台车实时倾斜角度已超出标准倾斜角度,中控模块将控制所述上侧油缸与下侧油缸停止伸出,并控制所述报警指示灯三级闪烁提示;
其中,所述第一预设条件为所述中控模块判定所述下侧油缸的实时下撑模应力未超出标准下撑模应力,且判定所述上侧油缸的实时上撑模应力已超出标准上撑模应力。
进一步地,所述中控模块内设置有标准位移Xb,中控模块在判定所述下侧油缸的实时下撑模应力已超出标准下撑模应力时,将控制所述位移传感器获取所述台车主桁架的实时位移Xs,并根据标准位移Xb对台车主桁架的实时位移Xs进行判定,
当Xs≤Xb时,所述中控模块判定所述台车主桁架的横向位移未超出标准位移,中控模块控制所述上侧油缸与下侧油缸进行收缩,并控制所述模板台车重新进行撑模;
当Xs>Xb时,所述中控模块判定所述台车主桁架的横向位移已超出标准位移,中控模块控制所述上侧油缸与下侧油缸停止伸出,并控制所述指示灯三级闪烁提示。
进一步地,所述中控模块在控制所述模板台车重新进行撑模时,根据标准上撑模应力对重新撑模的上侧油缸的实时上撑模应力进行判定,并根据标准下撑模应力对重新撑模的下侧油缸的实时下撑模应力进行判定,
若实时上撑模应力未超出标准上撑模应力,且实时下撑模应力未超出标准下撑模应力,中控模块将控制上侧油缸与下侧油缸持续伸出,直至所述上侧油缸与下侧油缸完全伸出时,中控模块判定完成撑模,并根据所述侧模板的模板实时倾斜角度进行判定,以控制所述报警指示灯;
若实时上撑模应力已超出标准上撑模应力,或实时下撑模应力已超出标准下撑模应力,中控模块将控制所述上侧油缸与所述下侧油缸停止伸出,并控制所述报警指示灯发出三级闪烁提示。
进一步地,所述中控模块内设置有重启标准倾斜角度Cb2,中控模块在第二预设条件下,通过所述左倾斜角度检测仪检测所述侧模板的模板实时倾斜角度Cs2并对其进行判定,
当Cs2≤Cb2时,所述中控模块判定模板实时倾斜角度未超出重启标准倾斜角度,将控制所述报警指示灯发出二级闪烁提示;
当Cs2>Cb2时,所述中控模块判定模板实时倾斜角度已超出重启标准倾斜角度,将控制所述报警指示灯发出三级闪烁提示;
其中,第二预设条件为在中控模块控制所述模板台车重新进行撑模时,实时上撑模应力未超出标准上撑模应力,实时下撑模应力未超出标准下撑模应力,且所述上侧油缸与所述下侧油缸完全伸出。
进一步地,所述顶双向转铰节与所述侧双向转铰节均为双向转铰节,所述双向转铰节包括一侧垂直连接有上连接板的上耳板与一侧垂直连接有下连接板的下耳板,所述上耳板与所述下耳板均设置有通孔,上耳板与下耳板通过穿过通孔的销轴进行连接。
进一步地,所述双向转铰节还包括,与上连接板和上耳板均垂直连接的上面板、与下连接板和下耳板均垂直连接的下面板,以及设置在上面板一侧的弹性盖板。
进一步地,所述顶双向转铰节能够在所述上侧油缸收缩时,向内侧转动并带动所述转角模板向靠近所述台车主桁架方向移动;在上侧油缸伸出时,向外侧转动并带动所述转角模板向远离所述台车主桁架方向移动;所述侧双向转铰节能够在所述下侧油缸收缩时,向内侧转动并带动所述侧模板向靠近台车主桁架方向移动进行脱模,并在下侧油缸伸出时,向外侧转动带动侧模板向远离台车主桁架方向移动进行撑模。
与现有技术相比,本发明的有益效果在于,通过上侧油缸与下侧油缸上分别设置上侧应力检测装置与下侧应力检测装置,对所述台车主桁架在撑模过程中的油缸受力进行实时的检测,通过在中控模块内设置台车主桁架倾斜角度、侧模板倾斜角度、台车主桁架位移标准,对撑模过程进行自动检测分析,并根据判定结果调整报警指示灯的闪烁等级,便于提醒工作人员以及进行实时跟踪撑模进程,并在台车主桁架产生较小位移或者轻微偏移时进行实时修正,避免了由于环境因素对撑模进程引起的误判,保障了撑模实施效果最优化,提高了撑模完成率及撑模精准率,利用实时监测控制自动模板台车进行撑模,保障了撑模施工效果。进一步地,通过在中控模块内设置有标准下撑模应力,以对下侧油缸处的受力进行实时监测分析,初步判定台车主桁架的稳定性,当下侧油缸处的应力在标准范围内,将进一步判定上侧油缸处的受力;当下侧油缸处的应力超出标准范围,将进一步判定台车主桁架的横向位移是否影响撑模进程,操控简便直接,监测精准。
进一步地,通过在中控模块内设置有标准上撑模应力,以对上侧油缸处的受力进行实时监测分析,进一步判定台车主桁架的稳定性,当上侧油缸处的应力在标准范围内,则台车主桁架稳定必然能够完成撑模过程;当上侧油缸处的应力超出标准范围,则将通过对台车实时倾斜角度进一步判定台车是否稳定从而是否能够继续撑模,智能化实时检测撑模过程,使各个检测系统之间有了联系,并产生互动,方便及时监控施工效果,节省人力,操控简便直接,经济实用,安全系数高。
进一步地,通过在中控模块内设置有标准倾斜角度,以对上侧油缸的受力进行实时监测分析,完成台车主桁架稳定性的判定从而是否能完成撑模进程,并调整报警指示灯的闪烁等级,操控简便直接,高效精准检测撑模进程。
进一步地,通过在中控模块内设置有标准位移,以在下侧油缸受力较大时判定台车主桁架稳定性,并在外阻较小时重启撑模动作,判定由于阻力所产生的位移是否干扰撑模进程,并调整报警指示灯的闪烁等级,对撑模过程进行智能化,各个检测系统之间有了联系,使原本相对独立的各个子系统,有机的结合在了一起,并产生互动,方便及时监控施工效果,节省人力,操控简便直接,经济实用,安全系数高。
进一步地,通过中控模块在控制模板台车重新进行撑模,确定此受力环境下是否能完成撑模,当台车上部和台车下部受力均未超出标准范围,则台车主桁架稳定,将根据侧模板的模板实时倾斜角度进一步判定台车主桁架的稳定性。
进一步地,通过在双向转铰节内设置连接紧密的上耳板与下耳板,使在转铰节转动撑模时,防止混凝土通过转铰节缝隙流出;通过在双向转铰节内设置销轴,使转铰节带动模板向任意角度偏转,操控简单、高效。
进一步地,通过在双向转铰节内设置弹性盖板,使转铰节转动脱模时,挡住缝隙从而阻挡混凝土从转铰节缝隙漏出,并且当油缸收缩时,上面板和下面板继续离开,当油缸伸出时,上面板和下面板靠近,转动不受影响,操作简单、高效。
进一步地,通过两个双向转铰节分别与侧模板和转角模板连接,在伸缩油缸时,双向转铰节能够带动转角模板或侧模板向任意方向移动,使模板上部转角处脱模距离扩大和模板下部与台车主桁架支腿距离缩小,避免了碰撞侧壁的危险,操作简单、高效,同时保证台车模板的整体完整性,保证混凝土施工质量,以及满足台车的使用要求。
附图说明
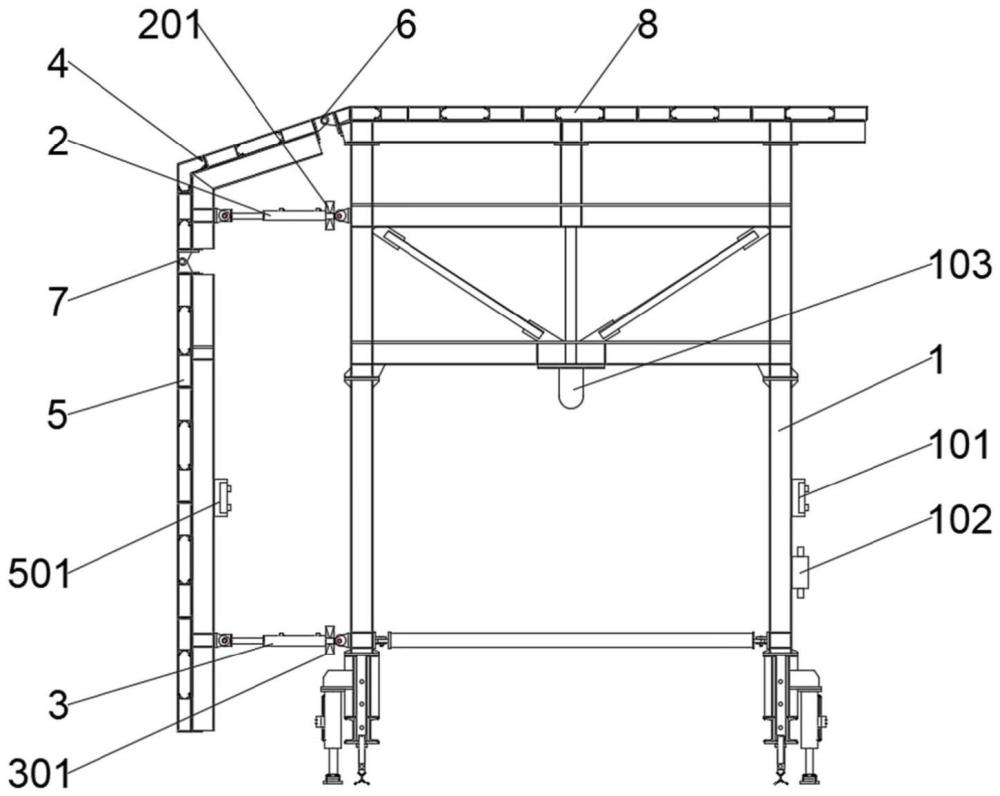
图1为本发明实施例所述双转铰节连接的模板台车的结构示意图;
图2为本发明实施例所述双向转铰节的结构示意图。
具体实施方式
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
请参阅图1所示,其为本发明实施例所述双转铰节连接的模板台车的结构示意图,本发明公布一种双转铰节连接的模板台车,包括,台车主桁架1、右倾斜角度检测仪101、位移传感器102、报警指示灯103、上侧油缸2、转角模板4、上侧应力检测装置201、下侧油缸3、侧模板5、下侧应力检测装置301、侧双向转铰节7、顶双向转铰6、顶模板8、左倾斜角度检测仪501、中控模块(图中未画出),其中,
台车主桁架1,其为所述模板台车的主体框架,所述台车主桁架1一侧上部设置有右倾斜角度检测仪101,同一侧下部设置有位移传感器102,所述右倾斜角度检测仪101用以检测台车主桁架1的台车实时倾斜角度,所述位移传感器102用以检测台车主桁架1的实时横向位移,所述台车主桁架1上还设置有报警指示灯103;
上侧油缸2,其设置在所述台车主桁架1的一侧上部,且与转角模板4相连,所述上侧油缸2能够通过收缩或伸出带动所述转角模板4脱模或撑模,上侧油缸2与所述台车主桁架1连接处设置有上侧应力检测装置201,用以检测所述上侧油缸2受到的实时上撑模应力;
下侧油缸3,其设置在所述台车主桁架1的一侧下部,且与侧模板5相连,所述下侧油缸3能够通过收缩或伸出带动所述侧模板5脱模或撑模,下侧油缸3与所述台车主桁架1连接处设置有下侧应力检测装置301,用以检测所述下侧油缸3受到的实时下撑模应力;
所述侧模板5上端通过侧双向转铰节7与所述转角模板4的一端相连,转角模板4的另一端通过顶双向转铰节6与顶模板相连,且侧模板5内侧设置有左倾斜角度检测仪501,用以检测侧模板5的模板实时倾斜角度;
中控模块,其与所述右倾斜角度检测仪101、所述左倾斜角度检测仪501、所述位移传感器102、所述上侧油缸2、所述下侧油缸3以及所述报警指示灯103分别相连;所述中控模块根据标准下撑模应力对所述下侧油缸3的实时下撑模应力进行判定,确定下侧油缸3伸出是否正常,并在正常时根据标准上撑模应力对所述上侧油缸2的实时上撑模应力进行判定,中控模块在实时上撑模应力未超出标准上撑模应力时,控制上侧油缸2与下侧油缸3完全伸出撑模,并控制所述报警指示灯103进行一级闪烁提示,中控模块在实时上撑模应力已超出标准上撑模应力时,对台车实时倾斜角度进行判定,控制上侧油缸2与下侧油缸3停止伸出或持续伸出,并在上侧油缸2与下侧油缸3停止伸出时控制报警指示灯103进行三级闪烁提示,在上侧油缸2与下侧油缸3持续伸出至完成撑模时,控制报警指示灯103二级闪烁提示。
通过上侧油缸2与下侧油缸3上分别设置上侧应力检测装置201与下侧应力检测装置301,对所述台车主桁架1在撑模过程中的油缸受力进行实时的检测,通过在中控模块内设置台车主桁架1倾斜角度、侧模板5倾斜角度、台车主桁架1位移标准,对撑模过程进行自动检测分析,并根据判定结果调整报警指示灯103的闪烁等级,便于提醒工作人员以及进行实时跟踪撑模进程,并在台车主桁架1产生较小位移或者轻微偏移时进行实时修正,避免了由于环境因素对撑模进程引起的误判,保障了撑模实施效果最优化,提高了撑模完成率及撑模精准率,利用实时监测控制自动模板台车进行撑模,保障了撑模施工效果。
在本实施例中,报警指示灯的一级闪烁提示为绿灯闪烁,用以提示现场施工人员撑模标准且完成,报警指示灯的二级闪烁提示为黄绿灯交替闪烁,用以提示现场施工人员撑模完成,需进行人为检查,报警指示灯的三级闪烁提示为红灯闪烁,用以提示现场施工人员该模板台车未能实现自动撑模,需施工人员进行现场调整处理施工。
具体而言,所述中控模块内设置有标准下撑模应力Fb1,在所述模板台车进行撑模时,所述中控模块控制所述下侧油缸3对所述下侧油缸3进行伸出撑模,所述下侧应力检测装置301将检测下侧油缸3缸体一侧的实时下撑模应力Fs1传输至中控模块,中控模块将实时下撑模应力Fs1与标准下撑模应力Fb1进行对比,
当Fs1≤Fb1时,所述中控模块判定所述下侧油缸3的实时下撑模应力未超出标准下撑模应力,判定下侧油缸3伸出正常,中控模块将对所述上侧油缸2的标准上撑模应力进行判定,以确定是否停止撑模;
当Fs1>Fb1时,所述中控模块判定所述下侧油缸3的实时下撑模应力已超出标准下撑模应力,判定下侧油缸3伸出异常,中控模块将对所述台车主桁架1的横向位移进行判定,以确定是否停止撑模。
其中,实时下撑模应力为下侧应力检测装置检查到的下侧油缸实时的受力,不考虑方向,只考虑大小;也可以检测所述下侧油缸的实时压力情况。
中控模块内设置的标准下撑模应力为侧模板正常顶出撑模时油缸的标准受力,理论上应保障侧模板顶出无阻挡,标准下撑模应力的设定应该根据侧模板的自身重量与双向转铰节的摩擦进行适应设定,还可以根据施工工况,考虑存在阻挡情况进行适应设定。
通过在中控模块内设置有标准下撑模应力Fb1,以对下侧油缸3处的受力进行实时监测分析,初步判定台车主桁架1的稳定性,当下侧油缸3处的应力在标准范围内,将进一步判定上侧油缸2处的受力;当下侧油缸3处的应力超出标准范围,将进一步判定台车主桁架1的横向位移是否影响撑模进程,操控简便直接,监测精准。
具体而言,所述中控模块内设置有标准上撑模应力Fb2,在所述中控模块判定所述下侧油缸3的实时下撑模应力未超出标准下撑模应力时,所述上侧应力检测装置201将检测上侧油缸2缸体一侧的实时上撑模应力Fs2传输至中控模块,中控模块将实时上撑模应力Fs2与标准上撑模应力Fb2进行对比,
当Fs2≤Fb2时,所述中控模块判定所述上侧油缸2的实时上撑模应力未超出标准上撑模应力,中控模块控制上侧油缸2与下侧油缸3持续伸出至完全伸出时,同时判定完成撑模,并控制所述报警指示灯103进行一级闪烁提示,
当Fs2>Fb2时,所述中控模块判定所述上侧油缸2的实时上撑模应力已超出标准上撑模应力,中控模块将对台车实时倾斜角度进行判定,以确定是否继续撑模。
其中,标准上撑模应力和标准下撑模应力的设定方法相同,实时上撑模应力和实时下撑模应力监测方法相同。
通过在中控模块内设置有标准上撑模应力Fb1,以对上侧油缸2处的受力进行实时监测分析,进一步判定台车主桁架1的稳定性,当上侧油缸2处的应力在标准范围内,则台车稳定必然能够完成撑模过程;当上侧油缸2处的应力超出标准范围,则将通过对台车实时倾斜角度进一步判定台车是否稳定从而是否能够继续撑模,智能化实时检测撑模过程,使各个检测系统之间有了联系,并产生互动,方便及时监控施工效果,节省人力,操控简便直接,经济实用,安全系数高。
具体而言,所述中控模块内设置有所述台车主桁架1的标准倾斜角度Cb1,中控模块在第一预设条件下将所述右倾斜角度检测仪101检测到的台车主桁架1的台车实时倾斜角度Cs1与标准倾斜角度Cb1进行对比,
当Cs1≤Cb1时,所述中控模块判定台车实时倾斜角度未超出标准倾斜角度;中控模块控制上侧油缸2与下侧油缸3持续伸出,直至所述上侧油缸2与下侧油缸3完全伸出时,中控模块判定完成撑模,并进行模板实时倾斜角度的判定和控制所述报警指示灯103二级闪烁提示;
当Cs1>Cb1时,所述中控模块判定台车实时倾斜角度已超出标准倾斜角度,中控模块将控制所述上侧油缸2与下侧油缸3停止伸出,并控制所述报警指示灯103三级闪烁提示;
其中,所述第一预设条件为所述中控模块判定所述下侧油缸3的实时下撑模应力未超出标准下撑模应力,且判定所述上侧油缸2的实时上撑模应力已超出标准上撑模应力。
通过在中控模块内设置有标准倾斜角度,以对上侧油缸的受力进行实时监测分析,完成台车主桁架1稳定性的判定从而是否能完成撑模进程,并调整报警指示灯103的闪烁等级,操控简便直接,高效精准检测撑模进程。
具体而言,所述中控模块内设置有标准位移Xb,中控模块在判定所述下侧油缸3的实时下撑模应力已超出标准下撑模应力时,将控制所述位移传感器102获取所述台车主桁架1的实时位移Xs,并根据标准位移Xb对台车主桁架1的实时位移Xs进行判定,
当Xs≤Xb时,所述中控模块判定所述台车主桁架1的横向位移未超出标准位移,中控模块控制所述上侧油缸2与下侧油缸3进行收缩,并控制所述模板台车重新进行撑模;
当Xs>Xb时,所述中控模块判定所述台车主桁架1的横向位移已超出标准位移,中控模块控制所述上侧油缸2与下侧油缸3停止伸出,并控制所述指示灯三级闪烁提示。
通过在中控模块内设置有标准位移,以在下侧油缸受力较大时判定台车主桁架稳定性,并在外阻较小时重启撑模动作,判定由于阻力所产生的位移是否干扰撑模进程,并调整报警指示灯103的闪烁等级,对撑模过程进行智能化,各个检测系统之间有了联系,使原本相对独立的各个子系统,有机的结合在了一起,并产生互动,方便及时监控施工效果,节省人力,操控简便直接,经济实用,安全系数高。
具体而言,所述中控模块在控制所述模板台车重新进行撑模时,根据标准上撑模应力对重新撑模的上侧油缸2的实时上撑模应力进行判定,并根据标准下撑模应力对重新撑模的下侧油缸3的实时下撑模应力进行判定,
若实时上撑模应力未超出标准上撑模应力,且实时下撑模应力未超出标准下撑模应力,中控模块将控制上侧油缸2与下侧油缸3持续伸出,直至所述上侧油缸2与下侧油缸3完全伸出时,中控模块判定完成撑模,并根据所述侧模板5的模板实时倾斜角度进行判定,以控制所述报警指示灯103;
若实时上撑模应力已超出标准上撑模应力,或实时下撑模应力已超出标准下撑模应力,中控模块将控制所述上侧油缸2与所述下侧油缸3停止伸出,并控制所述报警指示灯103发出三级闪烁提示。
通过中控模块在控制模板台车重新进行撑模,确定此受力环境下是否能完成撑模,当台车上部和台车下部受力均未超出标准范围,则台车主桁架1稳定,将根据侧模板5的模板实时倾斜角度进一步判定台车主桁架的稳定性。
具体而言,所述中控模块内设置有重启标准倾斜角度Cb2,中控模块在第二预设条件下,通过所述左倾斜角度检测仪501检测所述侧模板5的模板实时倾斜角度Cs2并对其进行判定,
当Cs2≤Cb2时,所述中控模块判定模板实时倾斜角度未超出重启标准倾斜角度,将控制所述报警指示灯103发出二级闪烁提示;
当Cs2>Cb2时,所述中控模块判定模板实时倾斜角度已超出重启标准倾斜角度,将控制所述报警指示灯103发出三级闪烁提示;
其中,第二预设条件为在中控模块控制所述模板台车重新进行撑模时,实时上撑模应力未超出标准上撑模应力,实时下撑模应力未超出标准下撑模应力,且所述上侧油缸2与所述下侧油缸3完全伸出。
请继续参阅图2所示,其为本发明实施例所述双向转铰节的结构示意图,包括,上耳板901,下耳板902,上连接板903,下连接板904,销轴905,上面板906,下面板907,弹性盖板908,其中,
所述顶双向转铰节6与所述侧双向转铰节7均为双向转铰节,所述双向转铰节包括一侧垂直连接有上连接板902的上耳板901与一侧垂直连接有下连接板904的下耳板902,所述上耳板901与所述下耳板902均设置有通孔,上耳板901与下耳板902通过穿过通孔的销轴905进行连接。
通过在双向转铰节内设置连接紧密的上耳板901与下耳板902,使在转铰节转动撑模时,防止混凝土通过转铰节缝隙流出;通过在双向转铰节内设置销轴905,使转铰节带动模板向任意角度偏转,操控简单、高效。
具体而言,所述双向转铰节还包括,与上连接板902和上耳板901均垂直连接的上面板906、与下连接板904和下耳板902均垂直连接的下面板907、以及设置在上面板一侧的弹性盖板908。
通过在双向转铰节内设置弹性盖板908,使转铰节转动脱模时,挡住缝隙从而阻挡混凝土从转铰节缝隙漏出,并且当油缸收缩时,上面板906和下面板907继续离开,当油缸伸出时,上面板906和下面板907靠近,转动不受影响,操作简单、高效。
具体而言,所述顶双向转铰节6能够在所述上侧油缸2收缩时,向内侧转动并带动所述转角模板4向靠近所述台车主桁架1方向移动;在上侧油缸2伸出时,向外侧转动并带动所述转角模板4向远离所述台车主桁架1方向移动;所述侧双向转铰节7能够在所述下侧油缸3收缩时,向内侧转动并带动所述侧模板5向靠近台车主桁架1方向移动进行脱模,并在下侧油缸3伸出时,向外侧转动带动侧模板5向远离台车主桁架1方向移动进行撑模。
通过两个双向转铰节分别与侧模板5和转角模板4连接,在伸缩油缸时,转铰节能够带动转角模板4或侧模板5向任意方向移动,使模板上部转角处脱模距离扩大和模板下部与台车主桁架1支腿距离缩小,避免了碰撞侧壁的危险,操作简单、高效,同时保证台车模板的整体完整性,保证混凝土施工质量,以及满足台车的使用要求。
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种明挖矩形隧道用衬砌模板台车及其施工工法
- 用于钢框木模板的双铰楔爪连接器
- 一种衬砌台车模板铰耳加强结构