一种坡道工况下车辆控制方法、系统及车辆
文献发布时间:2024-01-17 01:26:37
技术领域
本发明属于自动驾驶技术领域,具体涉及一种坡道工况下车辆控制方法、系统及车辆。
背景技术
相比于平路行驶状态,车辆在坡道工况下时,由于受重力分量的影响,对车辆保持匀速行驶或者起步、停车的控制都比较难。为了提升车辆在坡道工况下的控制平稳性,在车辆坡道控制过程中,一般常见的控制方法包括速度控制和加速度控制。
对于车辆在坡道巡航行驶过程中的速度控制,当前应用最多的是采用PID闭环控制方法对车辆速度进行控制,此时需要在纵向控制中引入积分环节来抵消坡道对于运动模型的干扰,以此来达到车辆在坡道上行驶时的速度控制。但该控制方法存在的缺点是:积分环节存在一定的滞后现象,会导致车辆控制出现较大的超调,造成车辆起步时间较长,车辆控制不够平稳,车辆控制舒适性较差。
对于车辆在坡道工况下行驶时的加速度控制,当前应用较多的是通过理论计算的方式,补偿一定的加/减速度,以使车辆按照要求行驶。在坡道补偿理论加速度计算时,由于只考虑车辆整体重量和重力加速度的影响,而忽略了车辆的运行状态、阻力、惯性、控制器响应延迟等因素的影响,使理论计算补偿值无法满足实际需求,导致车辆无法达到控制要求。而且,车辆在起步过程中仍然存在溜坡的现象,行驶过程中仍然不够平稳,停车时停车距离仍然较长。
发明内容
本发明的目的在于提供一种坡道工况下车辆控制方法、系统及车辆,用以解决车辆在坡道工况下行驶时仅利用理论计算补偿值来补偿加速度无法满足实际控制需求的问题。
为解决上述技术问题,本发明提供了一种坡道工况下车辆控制方法,该方法包括以下步骤:
1)获取车辆所处坡道的坡度角θ,并利用坡度角确定理论需要补偿的加速度a;
2)根据坡道工况和车辆运行情况,确定补偿系数k:
若坡道工况为上坡工况,且车辆在行驶过程中,计算实际加速度偏差Δa,根据实际加速度偏差Δa,判断仅利用理论需要补偿的加速度来进行补偿时得到的补偿结果为偏大还是偏小,并根据判断结果确定补偿系数k;其中,若判断结果为偏大,则补偿系数k小于1,若判断结果为偏小,则补偿系数k大于1,否则k等于1;
3)将补偿系数k、加速度权重w、理论需要补偿的加速度a、规划加速度a_plan进行如下计算,以得到实际控制加速度a_act为:
a_act=k*w*a+a_plan
其中,0<w<1;
4)利用得到的实际控制加速度a_act对车辆进行控制。
其有益效果为:面对坡道工况为上坡工况的情况,本发明方法中设置了一个补偿系数k,并判断了仅利用理论需要补偿的加速度来进行补偿时得到的补偿结果为偏大还是偏小,补偿系数根据该判断结果来设置,若判断结果为偏大,则补偿系数k小于1,若判断结果为偏小,则补偿系数k大于1,否则k等于1,进而将该系数与理论需要补偿的加速度a相乘,从而实现了根据判断结果来调整理论需要补偿的加速度a,使实际控制加速度a_act满足实际的控制需求,解决了仅利用理论计算补偿值来补偿加速度无法满足实际控制需求的问题。
进一步地,步骤2)中,按照如下方法计算得到所述实际加速度偏差Δa:
根据上一周期实际车速v_last,程序实际执行周期Δt,及上周期规划加速度a_plan_last,计算得到本周期理论计算车速v_cal为:
v_cal=v_last+a_plan_last*Δt
根据当前车速v、程序实际执行周期Δt、以及本周期理论计算车速v_cal,计算得到第一加速度偏差Δa1为:
根据本周期车身实际反馈加速度Δa2及上周期规划加速度a_plan_last,计算得到第二加速度偏差Δa2为:
Δa2=Δa2-a_plan_last
对第一加速度偏差Δa1和第二加速度偏差Δa2进行加权求和,得到实际加速度偏差Δa为:
Δa=x*Δa1+y*Δa2
其中,x,y分别为第一加速度偏差Δa1、第二加速度偏差Δa2对应的权重,且x、y均大于等于0小于等于1,x+y=1。
其有益效果为:对第一加速度偏差Δa1和第二加速度偏差Δa2进行加权求和来确定最终的实际加速度偏差,其中第一加速度偏差Δa1主要是考虑到速度变化计算得到,第二加速度偏差Δa2主要是考虑到加速度变化计算得到,从而使得计算得到的实际加速度偏差更准确,进而保证了k值确定的准确性。
进一步地,步骤2)中,若坡道工况为上坡工况,且车辆在行驶过程中,若Δa>0,则说明判断结果为偏大,则设置补偿系数为
其有益效果为:Δa>0时,说明判断结果为偏大,此时补偿系数k结合Δa和Δa_limit1来设置,以减小理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,步骤2)中,若坡道工况处于上坡工况,且车辆在行驶过程中,若Δa<0,则说明判断结果为偏小,则设置补偿系数为
其有益效果为:Δa<0时,说明判断结果为偏小,此时补偿系数k结合Δa、Δa_limit2以及θ、θ_limit来设置,以增大理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,步骤2)中,若坡道工况为上坡工况,且车辆在起步或停车过程中,则设置补偿系数为k=θ/θ_limit;若坡道工况为下坡工况,且车辆在停车过程中,则设置补偿系数为k=θ/θ_limit;其中,θ=min(θ,θ_limit),θ_limit为最大坡度角限值,min(,)表示求最小。
其有益效果为:坡道工况处于上坡工况,且车辆在起步或停车过程中,或者坡道工况处于下坡工况,且车辆在停车过程中,此时补偿系数k结合θ、θ_limit来设置,以减小理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,步骤2)中,若坡道工况为下坡工况,且车辆在起步或行驶过程中,还获取上周期规划加速度a_plan_last,结合实际加速度偏差Δa和上周期规划加速度a_plan_last来判断仅利用理论需要补偿的加速度来进行补偿时得到的补偿结果为偏大还是偏小,并根据判断结果确定补偿系数k;其中,若判断结果为偏大,则补偿系数k小于1,若判断结果为偏小,则补偿系数k大于1,否则k等于1。
其有益效果为:面对坡道工况为下坡工况的情况,本发明方法中设置了一个补偿系数k,并判断了仅利用理论需要补偿的加速度来进行补偿时得到的补偿结果为偏大还是偏小,补偿系数根据该判断结果来设置,若判断结果为偏大,则补偿系数k小于1,若判断结果为偏小,则补偿系数k大于1,否则k等于1,进而结合a_plan_last、Δa满足的条件,将该系数与理论需要补偿的加速度a相乘,从而实现了实际控制加速度a_act满足实际的控制需求。
进一步地,若a_plan_last<0且Δa>0,则说明判断结果为偏大,则设置补偿系数为
若a_plan_last>0且Δa<0,则说明判断结果为偏大,则设置补偿系数为
其有益效果为:a_plan_last<0且Δa>0时,说明判断结果为偏大,此时补偿系数k结合Δa和Δa_limit3来设置,以减小理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求;a_plan_last>0且Δa<0时,说明判断结果为偏大,此时补偿系数k结合Δa和Δa_limit4来设置,以减小理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,若a_plan_last<0且Δa<0,则说明判断结果为偏小,则设置补偿系数
若a_plan_last>0且Δa>0,则说明判断结果为偏小,则设置补偿系数为
其有益效果为:若a_plan_last<0且Δa<0,则说明判断结果为偏小,此时补偿系数k结合Δa、Δa_limit5以及θ、θ_limit来设置,以增大理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求;a_plan_last>0且Δa>0,说明判断结果为偏小,此时补偿系数k结合Δa、Δa_limit6以及θ、θ_limit来设置,以增大理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,若坡道工况为上坡工况,且车辆在行驶过程中,则加速度权重w=min(1.0,max(0.1,1.0-(v/v_limit))),其中,v为当前车速,v_limit为当前最大限速,min(,)表示求最小。
其有益效果为:本发明方法中设置了一个加速度权重w,根据当前车速v、当前最大限速数v_limit确定加速度权重w,进而实现实际控制加速度a_act满足实际的控制需求。
进一步地,若坡道工况为下坡工况,且车辆在起步或行驶过程中,则加速度值权重w=min(1.0,max(0.1,v/v_limit),其中,v为当前车速,v_limit为当前最大限速,min(,)表示求最小。
进一步地,所述坡度角θ为:
θ=|m*pitch+n*pitch_last|
其中,0≤θ<π/2,pitch为当前周期车身俯仰角,pitch_last为上一周期车身俯仰角,m,n分别为当前周期车身俯仰角pitch、上一周期车身俯仰角pitch_last对应的权重,且m、n均大于等于0小于等于1,m+n=1。
其有益效果为:θ根据pitch、pitch_last以及m、n确定,保证了θ值确定的准确性。
进一步地,若坡度工况为上坡工况,则理论需要补偿的加速度a为:a=gsin(θ)+μg(1-cos(θ));若坡度工况为下坡工况,则理论需要补偿的加速度a为:a=-gsin(θ)+μg(1-cos(θ));其中,g为重力加速度,μ为道路摩擦力系数且μ≤1.0。
为解决上述技术问题,本发明还提供了一种坡道工况下车辆控制系统,该系统包括传感器、存储器和处理器,所述传感器用于获取当前车辆所处坡道的坡度角θ并将获取到的信息传输给处理器,所述处理器用于运行存储在所述存储器中的程序指令,以实现上述介绍的坡道工况下车辆控制方法,并达到与该方法相同的有益效果。
为解决上述技术问题,本发明还提供了一种车辆,该车辆包括车辆本体,还包括坡道工况下车辆控制系统,该系统包括传感器、存储器和处理器,所述传感器用于获取当前车辆所处坡道的坡度角θ并将获取到的信息传输给处理器,所述处理器用于运行存储在所述存储器中的程序指令,以实现上述介绍的坡道工况下车辆控制方法,并达到与该方法相同的有益效果。
附图说明
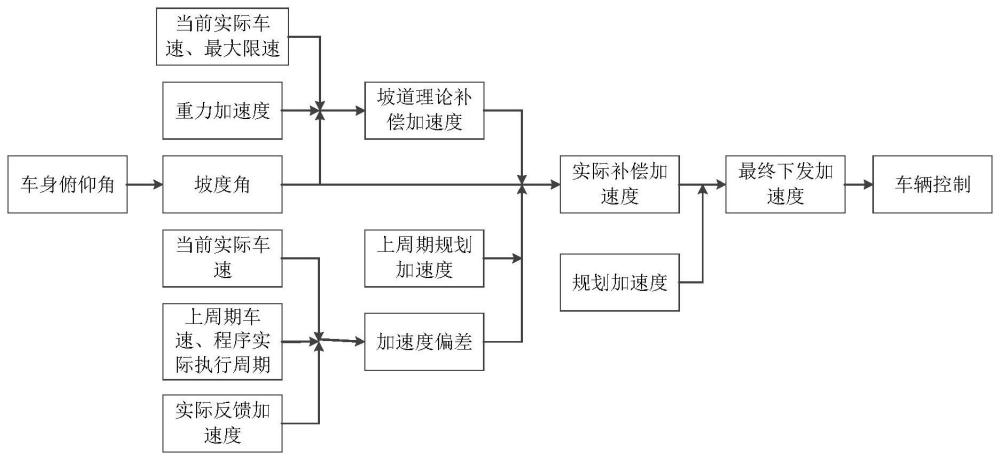
图1是本发明的系统整体设计示意图;
图2是本发明的坡道工况下车辆力学示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例对本发明进行进一步详细说明。
方法实施例:
本发明的一种坡道工况下车辆控制方法实施例,其整体设计示意图如图1所示,包括以下步骤:
1)获取车辆所处坡道的坡度角θ。由于地图上难以标定坡道具体坡度值,因此在实际执行过程中可以认为坡道角度θ(0≤θ<π/2)约等于车身俯仰角pitch,车身俯仰角可由车辆上配置相关传感器得到,为避免角度跳动带来的影响,需要对车身俯仰角做一定的滤波处理得到实际可使用俯仰角,根据当前周期车身俯仰角和历史车身俯仰角加权和得到:
θ=|pitch_real|=|0.2*pitch+0.8*pitch_last|
其中,pitch为当前周期车身俯仰角,pitch_last等于上一周期pitch_real,车身俯仰角的正负值分别代表了车辆上下坡过程。本实施例中,pitch、pitch_last对应的权重分别设置为0.2、0.8,可以根据实际情况调整。
2)利用坡度角确定理论需要补偿的加速度a。如图2所示为坡道工况下车辆力学示意图,图2中θ为坡道角度(0≤θ<π/2),m为车辆整体重量,g为重力加速度,F1所示为重力沿坡道方向上的分量,F3为摩擦阻力(方向与车辆行驶方向相反,上坡时为实线方向,下坡时为虚线方向),μ(μ≤1.0)为道路摩擦力系数,根据力学公式可以计算得到:
正常平直路面上(θ=0,F1=0,F3=μmg),正常速度规划已考虑摩擦力带来的影响,因此坡道上只需补偿摩擦力减小部分(即差值部分)的影响即可,假设坡道与平直路面摩擦系数一致,则摩擦力差值ΔF3可以表示为:
ΔF3=μmg-μmgcos(θ)=μmg(1-cos(θ))
上坡过程中车辆需要补偿的加速度为:
下坡过程中车辆需要补偿的减速度为:
其中,当μ=1时,有
因此,下坡过程中,恒有a≤0。
3)实际加速度偏差Δa的计算。根据上一周期实际车速v_last,程序实际执行周期Δt,及上周期规划加速度a_plan_last,得到本周期理论计算车速v_cal为:
v_cal=v_last+a_plan_last*Δt
则根据当前车速v,第一加速度偏差Δa1表示为:
根据本周期车身实际反馈加速度Δa2及上周期规划加速度a_plan_last,得到第二加速度偏差Δa2为:
Δa2=Δa2-a_plan_last
对两种加速度偏差进行加权求和,得到实际加速度偏差Δa为:
Δa=0.6*Δa1+0.4*Δa2
本实施例中,Δa1、Δa2对应的权重分别设置为0.6、0.4,可以根据实际情况调整。
4)上坡过程实际控制加速度的计算。
①车辆行驶过程中。
已知当前车速为v,当前最大限速为v_limit(由坡道道路上最大限速及车辆最大限速度决定),根据当前车速计算理论所需补偿的加速度值权重w:
w=min(1.0,max(0.1,1.0-(v/v_limit)))
已知车辆规划加速度为a_plan,则车辆理论所需加速度补偿值a_act为:
a_act=w*a+a_plan
a)当Δa>0时,说明补偿值偏大,需适当减小补偿值,取Δa为:
Δa=min(Δa,Δa_limit1)
其中Δa_limit1为第一加速度偏差补偿阈值且Δa_limit1>0;
已知车辆规划加速度为a_plan,则控制车辆实际所需加速度a_act为:
b)当Δa<0时,说明补偿值偏小,需适当增大补偿值,取Δa为:
Δa=max(Δa,Δa_limit2)
其中Δa_limit2为第二加速度偏差补偿阈值且Δa_limit2<0;
取θ=min(θ,θ_limit),则控制车辆实际所需加速度a_act为:
其中,θ_limit为最大坡度角限值,一般取θ_limit为0.17rad;
②车辆起步或停车时。
a)车辆起步时,需要补偿一个较大的加速度,以避免起步溜车,控制车辆实际所需加速度a_act为:
a_act=(θ/θ_limit)*w1*a+a_plan
其中,w1取w1≥1.0,具体值可根据实际需要进行标定。
b)车辆停车时,需补偿一个较大的减速度,以避免停车溜车,停车过程中,规划加速度a_plan<0.0,控制车辆实际所需减速度a_act为:
a_act=(θ/θ_limit)*w1*a+a_plan
其中,w1取w1≤-1.0,具体值可根据实际需要进行标定。
5)下坡过程实际控制加速度的计算。
①车辆起步及行驶过程中。
已知当前车速为v,当前最大限速为v_limit,根据当前急速计算所需补偿的加速度值权重w:
w=min(1.0,max(0.1,v/v_limit)
已知车辆规划加速度为a_plan,则控制车辆实际所需加速度a_act为:
a_act=w*a+a_plan
a)当a_plan_last<0且Δa>0时,说明补偿值偏大,需适当减小补偿值,取Δa为:
Δa=min(Δa,Δa_limit3)
其中Δa_limit3为第三加速度偏差补偿阈值且Δa_limit3>0;
已知车辆规划加速度为a_plan,则控制车辆实际所需加速度a_act为:
b)当a_plan_last>0且Δa<0时,说明补偿值偏大,需适当减小补偿值,取Δa为:
Δa=max(Δa,Δa_limit4)
其中Δa_limit4为第四加速度偏差补偿阈值且Δa_limit4<0;
已知车辆规划加速度为a_plan,则控制车辆实际所需加速度a_act为:
c)当a_plan_last<0且Δa<0时,说明补偿值偏小,需适当增大补偿值,取Δa为:
Δa=max(Δa,Δa_limit5)
其中Δa_limit5为第五加速度偏差补偿阈值且Δa_limit5<0;
取θ=min(θ,θ_limit),则控制车辆实际所需加速度a_act为:
其中,θ_limit为最大坡度角限值,一般取θ_limit为0.17rad;
d)当a_plan_last>0且Δa>0时,说明补偿值偏小,需适当增大补偿值,取Δa为:
Δa=min(Δa,Δa_limit6)
其中Δa_limit6为第六加速度偏差补偿阈值且Δa_limit6>0;
取θ=min(θ,θ_limit),则控制车辆实际所需加速度a_act为:
其中,θ_limit为最大坡度角限值,一般取θ_limit为0.17rad。
②车辆停车时。
车辆停车时,需补偿一个较大的减速度,以避免停车溜车,停车过程中,规划加速度a_plan<0.0,控制车辆实际所需减速度a_act为:
a_act=(θ/θ_limit)*w1*a+a_plan
其中,w1取w1≥1.0,具体值可根据实际需要进行标定。
6)利用得到的实际控制加速度a_act对车辆进行控制。
需说明的是,Δa_limit1、Δa_limit2、Δa_limit3、Δa_limit4、Δa_limit5、Δa_limit6其绝对值一般取不大于规划加速度绝对值的0.5倍,即|Δa_limit*(*为1、2、3…)|<|a_plan|*0.5。
而且,下坡过程实际控制加速度计算部分在确定Δa取值时,同时考虑了车辆规划加速度a_plan_last和Δa两个因素,而上坡过程实际控制加速度计算部分在确定Δa取值时,仅考虑了Δa一个因素,是因为上坡过程中,无论a_plan_last是否大于0,只要Δa大于0,就可以按照第一种方式补偿,反之,只要Δa小于0,即可按照第二种方式处理,故未添加a_plan_last条件判断。
综上,本发明具有如下特点:
(1)面对坡道工况为上坡工况的情况,本发明方法中设置了一个补偿系数k,并判断了仅利用理论需要补偿的加速度来进行补偿时得到的补偿结果为偏大还是偏小,补偿系数根据该判断结果来设置,若判断结果为偏大,则补偿系数k小于1,若判断结果为偏小,则补偿系数k大于1,否则k等于1,进而将该系数与理论需要补偿的加速度a相乘,从而实现了根据判断结果来调整理论需要补偿的加速度a,使实际控制加速度a_act满足实际的控制需求,解决了仅利用理论计算补偿值来补偿加速度无法满足实际控制需求的问题;
(2)对第一加速度偏差Δa1和第二加速度偏差Δa2进行加权求和来确定最终的实际加速度偏差,其中第一加速度偏差Δa1主要是考虑到速度变化计算得到,第二加速度偏差Δa2主要是考虑到加速度变化计算得到,从而使得计算得到的实际加速度偏差更准确,进而保证了k值确定的准确性;
(3)Δa>0时,说明判断结果为偏大,此时补偿系数k结合Δa和Δa_limit1来设置,以减小理论需要补偿的加速度a,进而实现实际控制加速度a_act满足实际的控制需求;
(4)本发明方法中设置了一个加速度权重w,根据当前车速v、当前最大限速数v_limit确定加速度权重w,进而实现实际控制加速度a_act满足实际的控制需求。
系统实施例:
本发明的一种坡道工况下车辆控制系统实施例,包括传感器、存储器、处理器和内部总线,处理器、存储器之间通过内部总线完成相互间的通信和数据交互。传感器包括车身俯仰角传感器、车速传感器,存储器包括至少一个存储于存储器中的软件功能模块,处理器通过运行存储在存储器中的软件程序以及模块,执行各种功能应用以及数据处理,实现本发明的方法实施例中介绍的一种坡道工况下车辆控制方法。
其中,车身俯仰角传感器可为陀螺仪传感器,车速传感器可为磁电式传感器、光电式传感器、霍尔式传感器。存储器可为利用电能方式存储信息的各式存储器,例如RAM、ROM等;也可为利用磁能方式存储信息的各式存储器,例如硬盘、软盘、磁带、磁芯存储器、磁泡存储器、U盘等;还可为利用光学方式存储信息的各式存储器,例如CD、DVD等;当然,还可为其他方式的存储器,例如量子存储器、石墨烯存储器等。处理器可以为车辆里的整车控制器,也可其他处理装置,如微处理器MCU、单片机、可编程逻辑器件FPGA等处理装置。
车辆实施例:
本发明的一种车辆实施例,车辆包括车辆本体,还包括坡道工况下车辆控制系统,该系统与系统实施例中的坡道工况下车辆控制系统相同,此处不再赘述。
- 车辆控制系统、车辆外置式电子控制单元、车辆控制方法及记录介质
- 一种车辆及其应用的车辆控制系统和方法
- 一种分布式驱动越野车辆的坡道低速工况行驶控制方法
- 一种分布式驱动越野车辆的坡道低速工况行驶控制方法