一种基于无人机的高空防坠装置及安装方法
文献发布时间:2024-01-17 01:21:27
技术领域
本发明属于电网登高工具技术领域,更具体的说是一种基于无人机的高空防坠装置及安装方法。
背景技术
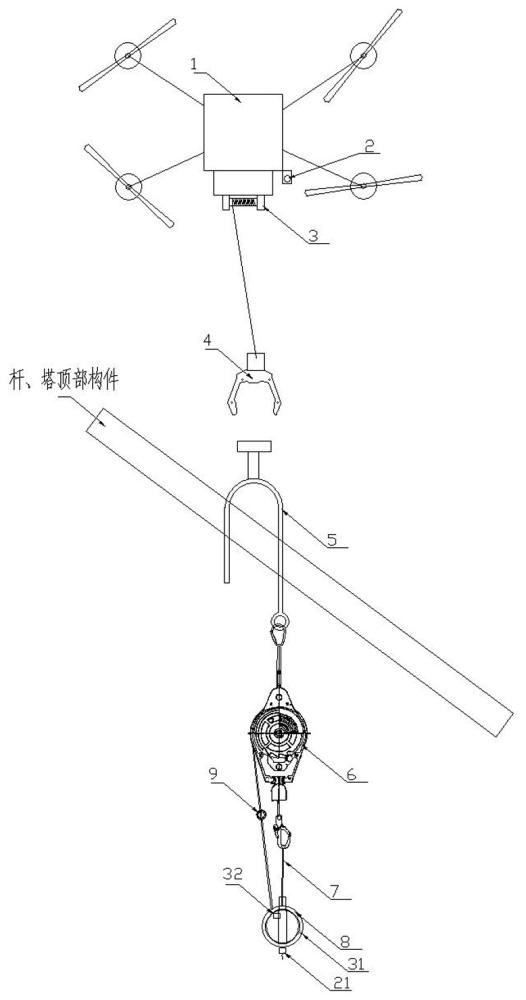
电力线路的电杆、铁塔普遍较高,工作人员在攀登塔、杆作业过程中若没有有效装置保护,时时存在着高处坠落的危险。在基于上述出现的问题情况下,本发明高空防坠装置及安装方法使操作人员可利用无人机起吊本防坠装置,作业人员在地面,把包含吊钩(5)、防坠器(6)、牵引绳(7)、牵引轮(8)吊装于杆、塔顶部稳固物件上,利用牵引绳、牵引轮把防坠器内部防坠绳牵引到地面,安装在作业人员安全带上即可登高作业。本发明提供一种基于无人机的高空防坠装置及其安装方法与传统方式相对比之下有以下优点:①工作人员免登杆②适用所有电杆及铁塔③操作精度准确④体力消耗较小等优点。
发明内容
本发明在于提供一种基于无人机的高空防坠装置及其安装方法,以解决上述提到的问题。
为实现上述目的,本发明采用的技术方案是:
一种基于无人机的高空防坠装置,其特征在于:包括无人机(1)、摄像头(2)、电动绞盘(3)、遥控机械手(4)、吊钩(5)、防坠器(6)、牵引绳(7)、牵引轮(8)、牵引轮释放器(9)、近电报警器(21)组成,所述摄像头(2)、电动绞盘(2)安装在无人机底部,所述遥控机械手(4)安装电动绞盘(3)绳索尾端,遥控机械手(4)抓住吊钩(5),所述吊钩(5)连接防坠器(6),所述防坠器(6)连接牵引绳(7),所述牵引绳(7)缠绕在牵引轮(8)上,所述近电报警器(21)安装在牵引轮(8)底部。
使用时现场人员操控无人机(1),通过遥控机械手把吊钩(5)连同防坠器(6)、牵引绳(7)、牵引轮(8)、牵引轮释放器(9)、近电报警器(21)一起起吊到电杆、铁塔顶部空中, 通过电动绞盘(3)把吊钩(5)释放且安装在电杆、铁塔顶部稳固构件上,之后释放牵引轮释放器(9),牵引绳(7)、牵引轮(8)在自重作用下下坠到地面,待到达地面后,作业人员通过牵引绳(7)、牵引轮(8)把防坠器(6)内部防坠绳牵引到地面,安装在安全带上即可进行登高作业。在作业人员意外失足坠落时,防坠器(6)内部防坠绳自动锁死,保护作业人员的安全。作业完成后,采用牵引绳(7)挂在防坠器(6)挂钩上、通过牵引轮(8)控制防坠器(6)内部防坠绳收缩速度,确保防坠器(6)内部防坠绳收缩到位,之后收回牵引绳(7)及牵引轮(8),通过遥控无人机机械手抓取吊钩(5),拆除防坠装置,完成作业。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为无人机在安装深U型吊钩的结构示意图;
图2为无人机在安装十字型吊钩的结构示意图;
图3为采用电动收缩防坠器情况下,无人机在安装深U型吊钩的结构示意图;
图4为采用电动收缩防坠器情况下,无人机在安装十字型吊钩的结构示意图;
图5为无人机只吊装吊钩(深U型吊钩)及防坠绳索的结构示意图;
图6为无人机只吊装吊钩(十字型吊钩)及防坠绳索的结构示意图;
图7为无人机只吊装吊钩(深U型吊钩)、防坠器的结构示意图;
图8为无人机只吊装吊钩(十字型吊钩)、防坠器的结构示意图;
附图构件说明:
无人机(1)、摄像头(2)、电动绞盘(3)、遥控机械手(4)、深U型吊钩(5)、防坠器(6)、牵引绳(7)、牵引轮(8)、牵引轮释放器(9)、防坠器电动机构(10)、防坠绳索(12)、防坠绳索速度控制器(13)、配重(14)、近电报警器(21)、牵引轮手摇摇把(31)、牵引轮速度控制器(32)、十字型吊钩(36)。
具体实施方式
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
一种基于无人机的高空防坠装置,其特征在于:包括无人机(1)、摄像头(2)、电动绞盘(3)、遥控机械手(4)、吊钩(5)、防坠器(6)、牵引绳(7)、牵引轮(8)、牵引轮释放器(9)、近电报警器(21)组成,所述摄像头(2)、电动绞盘(3)安装在无人机底部,所述遥控机械手(4)安装电动绞盘(3)绳索尾端,遥控机械手(4)抓住吊钩(5),所述吊钩(5)连接防坠器(6),所述防坠器(6)连接牵引绳(7),所述牵引绳(7)缠绕在牵引轮(8)上,所述近电报警器(21)安装在牵引轮(8)底部。使用时现场人员操控无人机(1),通过遥控机械手把吊钩(5)连同防坠器(6)、牵引绳(7)、牵引轮(8)、牵引轮释放器(9)、近电报警器(21)一起起吊到电杆、铁塔顶部空中, 通过电动绞盘(3)把吊钩(5)释放且安装在电杆、铁塔顶部稳固构件上,之后释放牵引轮释放器(9),牵引绳(7)、牵引轮(8)在自重作用下下坠到地面,待到达地面后,作业人员通过牵引绳(7)、牵引轮(8)把防坠器(6)内部防坠绳牵引到地面,安装在安全带上即可进行登高作业。在作业人员意外失足坠落时,防坠器(6)内部防坠绳自动锁死,保护作业人员的安全。作业完成后,采用牵引绳(7)挂在防坠器(6)挂钩上、通过牵引轮(8)控制防坠器(6)内部防坠绳收缩速度,确保防坠器(6)内部防坠绳收缩到位,之后收回牵引绳(7)及牵引轮(8),通过遥控无人机机械手抓取吊钩(5),拆除防坠装置,完成作业。
进一步地无人机(1)采用可载重5kg~100kg(可根据吊起重量自由选择)的载重无人机,无人机下端安装有360°全方位高清摄像头并把视频无线传输到遥控器上,遥控器要求有显示屏同步呈现,操控人员要求熟练掌握无人机操作要求,因考虑到无人机价值相对较高,非专业人员不得进行无人机操控,所只限专业人员进行操控安装步骤。
进一步地吊钩(5)可采取两种结构,可以根据杆、塔顶部稳固构件选择:第一种为十字型吊钩,这种吊钩运用于杆、塔顶部有两根平行且稳固的构件场景下,把吊钩从两根平行且稳固的构件中间放下,并使其十字的四个边稳稳卡死在杆上,吊钩的四个边均安装有防滑橡胶或齿痕以防发生滑落,吊钩的四个边均有向内弧度,确保吊钩稳固性,吊钩(4)安装完毕;第二种为深U型吊钩,这种吊钩运用于杆、塔顶部有一根稳固的构件环境下即可,深U型吊钩的U里面接触面也安装有防滑橡胶或齿痕以防发生滑落,把吊钩的深U口放下安装于杆上后,因为深U型缘故,从下面受力不会导致吊钩脱出,确保吊钩稳固性。安装好吊钩后,释放牵引轮释放器(9),牵引绳(7)、牵引轮(8)在自重作用下下坠到地面,待到达地面后,作业人员通过牵引绳(7)、牵引轮(8)把防坠器(6)内部防坠绳牵引到地面,安装在安全带上即可进行登高作业。在作业人员意外失足坠落时,防坠器(6)内部防坠绳自动锁死,保护作业人员的安全。作业完成后,采用牵引绳(7)挂在防坠器(6)挂钩上、通过牵引轮(8)控制防坠器(6)内部防坠绳收缩速度,确保防坠器(6)内部防坠绳收缩到位,收回牵引绳(7)及牵引轮(8),通过遥控无人机机械手抓取吊钩(5),拆除防坠装置,完成作业。
进一步近电报警器(21)在作业人员误挂带电线路时可以发出声光报警,提醒作业人员核对作业点,防止人员触电。
进一步地防坠器(8)可以采用电动收缩防坠器,可省略牵引绳(7)、牵引轮(8)、牵引轮释放器(9),在防坠器(8)中心设计加入一个可遥控速度的正反转的电动马达,吊钩(4)安装完毕后工作人员操控手中遥控器遥控防坠器(8)内部防坠绳索(6)缓缓下降,待到达地面后再用遥控器控制电动马达停止工作并把防坠绳索(6)尾端吊钩安装于自身安全带上即可进行登高操作。拆卸时工作人员下至地面用遥控器控制电动马达反向转动使其收回防坠绳索(6),待全部收回后遥控无人机机械手抓取吊钩(5),拆除防坠装置,完成作业。
进一步无人机可只吊装吊钩及防坠绳索(末端有配重),安装好吊钩后,把防坠绳尾端固定在杆、塔底部,工作人员把止坠器安装在防坠绳索上,把安全带固定在止坠器上即可登高作业。
进一步无人机可只吊装吊钩(5)、防坠器(6),安装好吊钩后,通过加长操作杆把防坠器(6)内部防坠绳索拉到地面,把安全带固定在防坠绳索上即可登高作业。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。