一种基于组群的新型智能灭火方法及其系统
文献发布时间:2024-01-17 01:27:33
技术领域
本发明属于消防技术领域,尤其涉及一种基于组群的新型智能灭火方法及其系统。
背景技术
在社会生活中,火灾的隐患处处存在,大大小小的火灾频繁发生,火灾已成为危害人民生命健康和公共财产最主要的灾害之一。特别是室内火灾,火焰蔓延速度非常快,如果不能在火灾发生初期及时将火扑灭,火势变大之后将难以控制,后果不堪设想。
现有技术中,实现灭火机器人灭火主要有三种方法:1)通过人工现场或远程遥控的方式控制灭火机器人行驶至火场执行灭火任务。如中国专利CN 111267128B公开的一种远程消防机器人控制器,可以通过该控制器控制消防机器人前往火场。这种方式必须有人工参与,智能化程度不高。2)通过侦察设备为灭火机器人提供火场位置信息。如中国专利CN110101996 B公开的一种复杂环境下消防机器人协同定位与自主作业方法,通过两个侦察机器人为灭火机器人提供火场位置信息;又如中国专利CN 107137838 B公开的一种基于消防机器人的火灾救援闭环控制系统及方法,通过无人机高空侦察的方式为灭火机器人提供火场位置信息。这种通过侦察设备为灭火机器人提供火场位置信息的方法原理复杂、技术难度高,而且应用场景受限,如无人机高空侦查的方式对无人机损害较大,其定位精度取决于GPS精度,而且面对室内着火的情形时失效。3)通过灭火机器人本体双目视觉设备实现对着火点的定位。如中国专利CN 109331378B公开的一种基于图像处理的灭火机器人及智能消防灭火方法,通过视频采集模块实时采集灭火机器人前方区域的图像,将着火点的位置信息传递给灭火机器人。这种方式适用于火场大致位置已知,对具体的着火点进行定位的情形。如果针对大范围火灾,对火场位置也采用这种定位方法,定位效率较低,会延误灭火时机,且此种方法原理复杂、技术难度高。
发明内容
为解决背景技术中存在的问题,本发明的第一个目的是提供一种基于组群的新型智能灭火方法,技术方案如下:
一种基于组群的新型智能灭火方法,包括以下步骤:
步骤S1:控制中心根据火场位置选择灭火机器人;
控制中心接收到火情信息后,根据火场位置锁定距火场最近的灭火机器人集中处,同时根据火场摄像头传递的火场火势图像,初步判定火势等级,以每个灭火机器人携带50%灭火剂的假设,计算所需灭火机器人的数量,随机选择该数量的灭火机器人,向其发送“前往火场灭火”指令;另外,再选择两个灭火机器人,向其发送“待命”指令;
步骤S2:选择的灭火机器人进行性能自检;
灭火机器人的控制单元通过无线信号接收模块在接收到“前往火场灭火”或“待命”指令后,进入自检程序,自检项目包括灭火机器人的下层行走部分及上层功能部分是否存在异常、灭火机器人的自身电量是否充足、灭火剂容量是否充足;
步骤S3:控制中心派出自检合格的灭火机器人前往火场;
S31:当仅需一个灭火机器人时,在前往火场的路上,控制单元会实时发送自检指令,当发现新的着火点则通知控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人前往新的着火点执行灭火任务,发现障碍物则绕开障碍物继续前进,如若障碍物无法绕开则开启“突围”模式,撞开一条出路继续前进,如若“突围”模式持续一段时间后道路仍然未通,此时控制中心派遣消防人员前往火场;
S32:当需要多个灭火机器人时,控制中心向灭火机器人发送编队行驶指令,灭火机器人接收到编队行驶指令后进入编队行驶状态,并根据编队行驶指令中的位置排序形成车辆编队,保证灭火机器人车速的同时,保持灭火机器人之间具有稳定的车间距;
步骤S4:灭火机器人执行灭火任务;
通过灭火机器人的视觉传感器确认具体着火点所在位置以及火势大小;
若着火点只有一处,控制单元控制下层行走部分直接前往着火点,若着火点有多处,控制单元按优先级选择着火点进行灭火:
根据火势大小,判断携带的灭火剂是否充足,若灭火剂总量不足,则通过其无线信号发射模块向控制中心发送信息,请求派其它机器人前往火场支援,控制中心根据计算,在两个“待命”状态的机器人中选择一个或两个前往火场执行灭火任务,若增加两个灭火机器人仍无法达到灭火需要的灭火剂总量,则继续添加“待命”状态的灭火机器人前往火场执行灭火任务,当增加的灭火机器人超过5个时,判定火场处于危险状态,控制中心立刻向消防部门报警。
作为本发明的优选,步骤S2中,接收“前往火场灭火”指令的灭火机器人的自检程序如下:
控制单元判断自检项目是否达标,如三项自检项目均达标则自检合格,如三项中的至少一项自检项目未达标,则该灭火机器人向控制中心发送信息,请求派其它灭火机器人前往,控制中心则选择“待命”状态的灭火机器人中的一个,向其发送“前往火场灭火”指令,同时再添加一个灭火机器人向其发送“待命”指令,另外,接收“前往火场灭火”指令的灭火机器人立刻进入自检程序,直至找到三项自检项目均达标的“前往火场灭火”的灭火机器人。
作为本发明的优选,步骤S2中,接收“待命”指令的灭火机器人的自检程序如下:
控制单元判断自检项目是否达标,如三项自检项目均达标则自检合格,向控制中心返回“OK”状态,随时可接收“前往火场灭火”指令,如第一个项目未达标,则该灭火机器人向控制中心发送信息,请求派其它灭火机器人“待命”,控制中心则选择未接收过指令的灭火机器人中的一个,向其发送“待命”指令,接收“待命”指令的灭火机器人立刻进入自检程序,直至找到该项目达标的“待命”的灭火机器人后,进入后两项自检,后两项自检项目均达标则自检合格,向控制中心返回“OK”状态,随时可接收“前往火场灭火”指令,如果后两项自检项目不达标,则该灭火机器人针对不达标项目立刻开启快速充电模式或/和填充灭火剂开关,迅速补充灭火剂,当后两项自检项目达标,则向控制中心返回“OK”状态,随时可接收“前往火场灭火”指令。
作为本发明的优选,灭火器可自动感知灭火剂容量,灭火材料选用二氧化碳,灭火器外壳采用圆柱形钢瓶,在钢瓶内安装有温度传感器、气压传感器与液位传感器,分别与控制单元连接,此自检步骤开始后,液位传感器将瓶中灭火剂的液位值传递给控制单元,控制单元依此计算出对应的灭火剂容量,公式为:
V=H·S
式中,V为灭火剂容量,H为灭火剂液位高度,S为灭火器钢瓶的内空间横截面积。
作为本发明的优选,步骤S31的具体过程如下:
若该灭火机器人在前往火场的路上,其视觉传感器发现新的着火点,则将着火点位置传递给控制单元,控制单元将着火点位置发送给控制中心,控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人前往新的着火点执行灭火任务,同时再添加一个灭火机器人进入“待命”状态,并进行步骤S2中的性能自检;其视觉传感器或激光雷达探测到临时障碍物,会将障碍物信息传递给控制单元,控制单元规划路径,向该灭火机器人的下层行走部分发出指令,使其绕开障碍物,继续前往火场,若临时障碍物将路围堵,使得该灭火机器人不能绕行,则控制单元选择障碍物最少的方向,开启“突围”模式,先控制该灭火机器人后退,然后以最大加速度启动,撞开一条出路,若该模式持续20s后道路仍然未突围,此时控制中心派遣消防人员前往火场;
该灭火机器人在行进过程中,控制单元会实时发送自检指令,判断下层行走部分与上层功能部分状态是否正常,若灭火机器人遭到破坏导致下层行走部分或上层功能部分发生异常,控制单元向控制中心发送信息,请求派其它灭火机器人执行灭火任务,控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人执行灭火任务,同时再添加一个灭火机器人进入“待命”状态,并进行步骤S2中的性能自检。
作为本发明的优选,步骤S32中,控制中心需要建立编队控制模型:
将灭火机器人纵向动力学表示成1阶惯性延时模型,即灭火机器人的实际加速度与期望加速度之间存在1阶惯性时滞,可表示为:
式中,x
采用前馈加反馈的控制策略来决策灭火机器人的期望加速度i,在进行灭火机器人编队控制的纵向跟随模型构建过程中,采用了非线性队列跟驰模型,并充分考虑了灭火机器人惯性时滞和通信延时的影响,可表示为:
式中,h
针对编队的内稳定性:当头车具有状态波动时,控制器能在一定时间后使所有灭火机器人维持到稳定的行驶速度,并保持合理的跟车距离,为保证灭火机器人编队的内稳定性,系统误差传递函数的特征根必须均具有负实部,即:
H(s)=(τs
式中,s为误差,N为灭火机器人数量,将s替换成iω,可以得到增益α、β的边界值:
针对编队的队列稳定性:为避免由于头车的微小输入,导致队尾出现大幅度振荡现象,队列稳定性的充分必要条件为:
式中,Γ为前车到后车的误差传递函数,为避免出现极小值小于0的现象,给出对极小值的约束条件:
式中:
由此可得队列稳定性的控制器增益边界,保证编队的队列稳定性。
作为本发明的优选,步骤S4中,优先级的划分标准如下:
A级-存在被困人员;
B级-按燃烧物的危险程度由高到低排序;
C级-按火势由大到小排序;
将火势大小划分为六个等级,按照“火势大则安全灭火距离大,火势小则安全灭火距离小”的原则,在灭火机器人内部编写程序,每个等级对应一个安全灭火距离,视觉传感器将着火点火势大小传递给控制单元,控制单元将火势大小换算为火势等级,根据火势等级确定灭火机器人与着火点的安全灭火距离,在灭火过程中,控制单元可实时监测火势并进行换算,实现安全灭火距离的动态调整。
作为本发明的优选,步骤S4中,判断携带的灭火剂是否充足的具体过程如下:
在灭火机器人内部编写程序,为每个灭火等级设定对应所需的灭火剂容量,在确认完具体着火点位置即灭火开始前,控制单元会对所有着火点的火势等级进行加和,得出灭火需要的灭火剂总量,与自身携带的灭火剂容量进行比较,以判定携带的灭火剂是否充足;另外,在灭火过程中,控制单元会实时进行火势等级与灭火剂余量的比较。
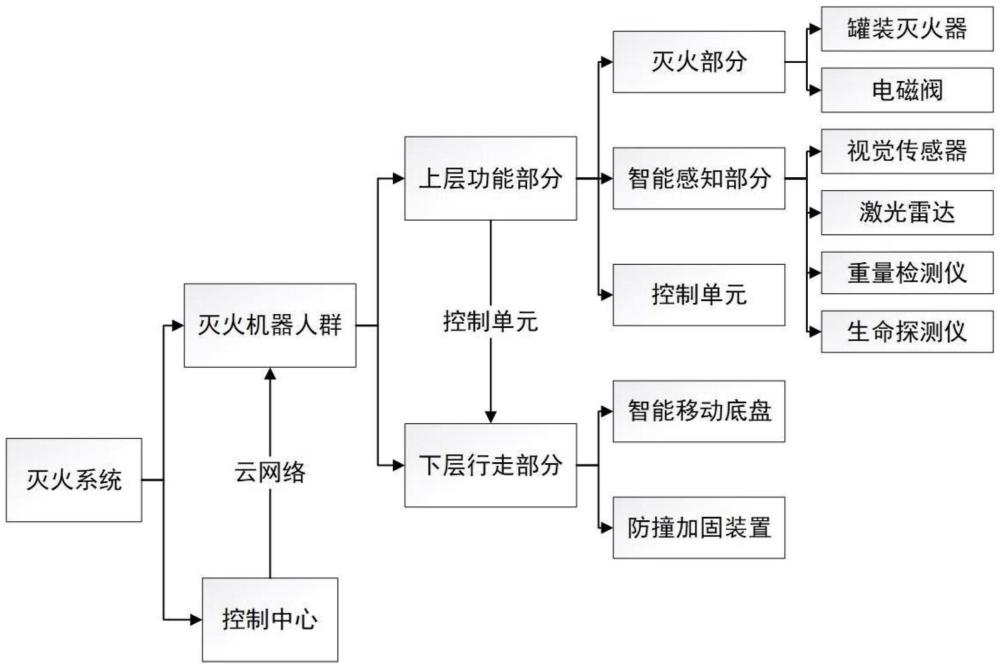
本发明的第二个目的是提供一种基于组群的新型智能灭火系统,包括灭火机器人群组、控制中心,所述控制中心通过云网络实现对灭火机器人群组的控制、调配和监控;所述灭火机器人群组包括多个负责执行灭火任务的灭火机器人,所述灭火机器人包括上层功能部分和下层行走部分,所述上层功能部分包括灭火部分、智能感知部分和控制单元,所述灭火部分包括灭火器和电磁阀,所述智能感知部分包括视觉传感器、激光雷达、重量检测仪和生命探测仪;
所述灭火部分的灭火器为灌装灭火器,内装灭火剂,开口由电磁阀控制,电磁阀接收控制单元的指令后开启或关闭;
所述视觉传感器可360度旋转,与烟雾传感器共同配合,以识别出现在灭火机器人视野中的物体信息、着火点位置、火势大小以及着火点燃烧物的类型,并将识别到的信息传递给控制单元;
所述激光雷达检测四周障碍物信息,并将其传递给控制单元;
所述重量检测仪可测量灭火器的重量,并将其传递给控制单元;
所述生命探测仪可检测火场是否存在被困人员,如果存在,则将被困员人位置信息传递给控制单元;
所述控制单元可根据以上接收到的信息,确定灭火的优先级,将灭火器的重量换算成对应的灭火剂容量,向下层行走部分发出指令,使灭火机器人以规划的避开障碍物的路径前往着火点,在保持灭火的安全距离的条件下进行灭火。
作为本发明的优选,所述下层行走部分包括智能移动底盘和防撞加固装置,所述智能移动底盘通过接收控制单元的指令实现行走,所述防撞加固装置安装在智能移动底盘的四周,在灭火机器人开启“突围”模式时,可通过防撞加固装置为灭火机器人开辟一条通路,同时保证灭火机器人自身不受损坏。
本发明的有益效果如下:
(1)本发明提供的基于组群的新型智能灭火方法及其系统,无需人员现场参加,智能程度高,在火势大的情况下,可使多个灭火机器人共同协作,能够利用灭火机器人的视觉传感器快速准确定位火场,将火灾消灭于萌芽。
(2)本发明提供的基于组群的新型智能灭火方法及其系统,通过云网络的形式实现灭火机器人与控制中心之间的智能互联,极大增强了处置火情的能力,提高了灭火的效率,同时通过实时换算,准确排除相应数量的灭火机器人,能够最大限度地降低系统能耗。
(3)本发明提供的基于组群的新型智能灭火方法及其系统,设计了一种调配灭火机器人执行灭火任务的逻辑与方法,能够基于火场位置选择最合理的灭火机器人执行灭火任务,并能够在执行任务的灭火机器人发生故障时安排其它灭火机器人继续执行任务。
(4)本发明提供的基于组群的新型智能灭火方法及其系统,在火势大的情况下,需要组队前往火场,为保证全队行驶的速度和稳定性,为编队建立了编队控制模型,进一步的提高了救火的速率。
附图说明
通过参考以下结合附图的说明,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
图1为本发明的系统构架图;
图2为本发明中灭火机器人的自检流程图;
图3为本发明中灭火机器人前往火场的工作原理图。
具体实施方式
为使本领域技术人员能够更好的理解本发明的技术方案及其优点,下面结合附图对本申请进行详细描述,但并不用于限定本发明的保护范围。
实施例1
参阅图1:一种基于组群的新型智能灭火系统,包括灭火机器人群组、控制中心,控制中心通过云网络实现对灭火机器人群组的控制、调配和监控;灭火机器人群组包括多个负责执行灭火任务的灭火机器人,灭火机器人包括上层功能部分和下层行走部分,上层功能部分包括灭火部分、智能感知部分和控制单元,灭火部分包括灭火器和电磁阀,智能感知部分包括视觉传感器、激光雷达、重量检测仪和生命探测仪;
灭火部分的灭火器为灌装灭火器,内装灭火剂,开口由电磁阀控制,电磁阀接收控制单元的指令后开启或关闭;
视觉传感器可360度旋转,与烟雾传感器共同配合,以识别出现在灭火机器人视野中的物体信息、着火点位置、火势大小以及着火点燃烧物的类型,并将识别到的信息传递给控制单元;
激光雷达检测四周障碍物信息,并将其传递给控制单元;
重量检测仪可测量灭火器的重量,并将其传递给控制单元;
生命探测仪可检测火场是否存在被困人员,如果存在,则将被困员人位置信息传递给控制单元;
控制单元可根据以上接收到的信息,确定灭火的优先级,将灭火器的重量换算成对应的灭火剂容量,向下层行走部分发出指令,使灭火机器人以规划的避开障碍物的路径前往着火点,在保持灭火的安全距离的条件下进行灭火。
进一步地,下层行走部分包括智能移动底盘和防撞加固装置,智能移动底盘通过接收控制单元的指令实现行走,防撞加固装置安装在智能移动底盘的四周,在灭火机器人开启“突围”模式时,可通过防撞加固装置为灭火机器人开辟一条通路,同时保证灭火机器人自身不受损坏。
实施例2
一种基于组群的新型智能灭火方法,包括以下步骤:
步骤S1:控制中心根据火场位置选择灭火机器人;
控制中心接收到火情信息后,根据火场位置锁定距火场最近的灭火机器人集中处,同时根据火场摄像头传递的火场火势图像,初步判定火势等级,以每个灭火机器人携带50%灭火剂的假设,计算所需灭火机器人的数量,随机选择该数量的灭火机器人,向其发送“前往火场灭火”指令;另外,再选择两个灭火机器人,向其发送“待命”指令;
步骤S2:选择的灭火机器人进行性能自检;
灭火机器人的控制单元通过无线信号接收模块在接收到“前往火场灭火”或“待命”指令后,进入自检程序,自检项目包括灭火机器人的下层行走部分及上层功能部分是否存在异常、灭火机器人的自身电量是否充足、灭火剂容量是否充足;
步骤S3:控制中心派出自检合格的灭火机器人前往火场;
S31:当仅需一个灭火机器人时,在前往火场的路上,控制单元会实时发送自检指令,当发现新的着火点则通知控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人前往新的着火点执行灭火任务,发现障碍物则绕开障碍物继续前进,如若障碍物无法绕开则开启“突围”模式,撞开一条出路继续前进,如若“突围”模式持续一段时间后道路仍然未通,此时控制中心派遣消防人员前往火场;
S32:当需要多个灭火机器人时,控制中心向灭火机器人发送编队行驶指令,灭火机器人接收到编队行驶指令后进入编队行驶状态,并根据编队行驶指令中的位置排序形成车辆编队,保证灭火机器人车速的同时,保持灭火机器人之间具有稳定的车间距;
步骤S4:灭火机器人执行灭火任务;
通过灭火机器人的视觉传感器确认具体着火点所在位置以及火势大小;
若着火点只有一处,控制单元控制下层行走部分直接前往着火点,若着火点有多处,控制单元按优先级选择着火点进行灭火:
根据火势大小,判断携带的灭火剂是否充足,若灭火剂总量不足,则通过其无线信号发射模块向控制中心发送信息,请求派其它机器人前往火场支援,控制中心根据计算,在两个“待命”状态的机器人中选择一个或两个前往火场执行灭火任务,若增加两个灭火机器人仍无法达到灭火需要的灭火剂总量,则继续添加“待命”状态的灭火机器人前往火场执行灭火任务,当增加的灭火机器人超过5个时,判定火场处于危险状态,控制中心立刻向消防部门报警;
进一步地,参阅图2,步骤S2中,接收“前往火场灭火”指令的灭火机器人的自检程序如下:
S211:控制单元判断灭火机器人的下层行走部分及上层功能部分是否存在异常,无异常的灭火机器人自动进入下一步判断,有异常的灭火机器人通过无线信号发射模块向控制中心发送信息,请求派其它灭火机器人前往,控制中心则选择“待命”状态的灭火机器人中的一个,向其发送“前往火场灭火”指令,同时再添加一个灭火机器人向其发送“待命”指令,另外,接收该指令的灭火机器人立刻进入自检程序,直至找到此判断环节无异常的“前往火场灭火”的灭火机器人以进入下一步判断;
S212:控制单元判断灭火机器人的自身电量是否充足,电量充足的灭火机器人自动进入下一判断,电量不充足的机器人通过无线线号发射模块向控制中心发送信息,请求派其它灭火机器人前往,控制中心则选择“待命”状态的灭火机器人中的一个,向其发送“前往火场灭火”指令,同时再添加一个灭火机器人向其发送“待命”指令,另外,接收该指令的灭火机器人立刻进入自检程序,执行S211和S212,直至找到以上两个环节均无异常的“前往火场灭火”的灭火机器人以进入下一步判断;
S213:控制单元判断灭火剂容量是否充足,灭火剂容量充足的灭火机器人自检合格,灭火剂容量不充足的灭火机器人通过无线线号发射模块向控制中心发送信息,请求派其它灭火机器人前往,控制中心则选择“待命”状态的灭火机器人中的一个,向其发送“前往火场灭火”指令,同时再添加一个灭火机器人向其发送“待命”指令,另外,接收该指令的灭火机器人立刻进入自检程序,执行S211、S212和S213,直至找到以上三个环节均无异常的“前往火场灭火”的灭火机器人;
接收“待命”指令的灭火机器人的自检程序如下:
S221:控制单元判断灭火机器人的下层行走部分及上层功能部分是否存在异常,无异常的灭火机器人自动进入下一步判断,有异常的灭火机器人通过无线信号发射模块向控制中心发送信息,请求派其它灭火机器人“待命”,控制中心则选择未接收过指令的灭火机器人中的一个,向其发送“待命”指令,接收该指令的灭火机器人立刻进入自检程序,直至找到此判断环节无异常的“待命”的灭火机器人以进入下一步判断;
S222:控制单元判断灭火机器人的自身电量是否充足,电量充足的灭火机器人自动进入下一判断,电量不充足的机器人则立刻开启快速充电模式,充电完成后进入下一步判断;
S223:控制单元判断灭火剂容量是否充足,灭火剂容量充足的灭火机器人向控制中心返回“OK”状态,随时可接收“前往火场灭火”指令,灭火剂容量不充足的灭火机器人则立刻开启快速填充灭火剂开关,迅速补充灭火剂,灭火剂容量超过50%后向控制中心返回“OK”状态,随时可接收“前往火场灭火”指令。
进一步地,灭火器可自动感知灭火剂容量,灭火材料选用二氧化碳,灭火器外壳采用圆柱形钢瓶,在钢瓶内安装有温度传感器、气压传感器与液位传感器,分别与控制单元连接,由于二氧化碳的临界温度为31℃,临界压力为7.3MPa,室内恒温为20℃左右,灭火器额定压力为5MPa,所以在正常情况下,瓶中的二氧化碳为液态,此自检步骤开始后,液位传感器将瓶中灭火剂的液位值传递给控制单元,控制单元依此计算出对应的灭火剂容量,计算公式为:
V=H·S
式中,V为灭火剂容量,H为灭火剂液位高度,S为灭火器钢瓶的内空间横截面积。
进一步地,参阅图3,步骤S31的具体过程如下:
若该灭火机器人在前往火场的路上,其视觉传感器发现新的着火点,则将着火点位置传递给控制单元,控制单元通过其无线信号发射模块将着火点位置发送给控制中心,控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人前往新的着火点执行灭火任务,同时再添加一个灭火机器人进入“待命”状态,并进行步骤S2中的性能自检;其视觉传感器或激光雷达探测到临时障碍物,会将障碍物信息传递给控制单元,控制单元规划路径,向该灭火机器人的下层行走部分发出指令,使其绕开障碍物,继续前往火场,若临时障碍物将路围堵,使得该灭火机器人不能绕行,则控制单元选择障碍物最少的方向,开启“突围”模式,先控制该灭火机器人后退,然后以最大加速度启动,撞开一条出路,若“突围”模式持续20s后道路仍然未突围,控制单元向控制中心发送信息,请求派其它路径上的灭火机器人执行灭火任务,控制中心在选择灭火机器人时,自动规避掉通过该路径前往火场的灭火机器人,若前往火场只有此一条路径或无可通过其它路径前往火场的灭火机器人,控制中心派遣消防人员前往火场救火此时控制中心派遣消防人员前往火场;
该灭火机器人在行进过程中,控制单元会实时发送自检指令,判断下层行走部分与上层功能部分状态是否正常,若灭火机器人遭到破坏导致下层行走部分或上层功能部分发生异常,控制单元通过其无线信号发射模块向控制中心发送信息,请求派其它机器人执行灭火任务,控制中心派遣处于“待命”状态的距该着火点较近的灭火机器人执行灭火任务,同时再添加一个灭火机器人进入“待命”状态,并进行步骤S2中的性能自检。
进一步地,步骤S32中,控制中心需要建立编队控制模型:
将灭火机器人纵向动力学表示成1阶惯性延时模型,即灭火机器人的实际加速度与期望加速度之间存在1阶惯性时滞,可表示为:
式中,x
为保证编队中的灭火机器人能够快速、准确跟随前车的速度,采用前馈加反馈的控制策略来决策灭火机器人的期望加速度i,该策略将前车加速度信息作为前馈量实现状态的快速响应,并将跟随误差以及速度差作为反馈量来缩小控制误差,在进行灭火机器人编队控制的纵向跟随模型构建过程中,采用了非线性队列跟驰模型,并充分考虑了灭火机器人惯性时滞和通信延时的影响,可表示为:
式中,h
针对编队的内稳定性:当头车具有状态波动时,控制器能在一定时间后使所有灭火机器人维持到稳定的行驶速度,并保持合理的跟车距离,为保证灭火机器人编队的内稳定性,系统误差传递函数的特征根必须均具有负实部(全都落在虚轴左侧),即:
H(s)=(τs
式中,s为误差,N为灭火机器人数量,将s替换成iω,可以得到增益α、β的边界值:
针对编队的队列稳定性:为避免由于头车的微小输入,导致队尾出现大幅度振荡现象,队列稳定性的充分必要条件为:
式中,Γ为前车到后车的误差传递函数,为避免出现极小值小于0的现象,给出对极小值的约束条件:
式中:
由此可得队列稳定性的控制器增益边界,保证编队的队列稳定性。
进一步地,步骤S4中,优先级的划分标准如下:
A级-存在被困人员;
B级-按燃烧物的危险程度由高到低排序;
C级-按火势由大到小排序;
将火势大小划分为六个等级,按照“火势大则安全灭火距离大,火势小则安全灭火距离小”的原则,在灭火机器人内部编写程序,每个等级对应一个安全灭火距离,视觉传感器将着火点火势大小传递给控制单元,控制单元将火势大小换算为火势等级,根据火势等级确定灭火机器人与着火点的安全灭火距离,在灭火过程中,控制单元可实时监测火势并进行换算,实现安全灭火距离的动态调整,确保灭火机器人自身安全。
进一步地,步骤S4中,判断携带的灭火剂是否充足的具体过程如下:
在灭火机器人内部编写程序,为每个灭火等级设定对应所需的灭火剂容量,在确认完具体着火点位置即灭火开始前,控制单元会对所有着火点的火势等级进行加和,得出灭火需要的灭火剂总量,与自身携带的灭火剂容量进行比较,以判定携带的灭火剂是否充足;另外,灭火机器人在灭火过程中,控制单元会实时进行火势等级与灭火剂余量的比较,以应对“灭火开始前灭火剂余量充足,灭火开始后火势突然增大”的情况。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。