一种自动化泊车测试方法、装置以及系统
文献发布时间:2024-01-17 01:13:28
技术领域
本申请涉及自动泊车技术领域,更具体地,涉及一种自动化泊车测试方法、装置以及系统。
背景技术
自动泊车辅助系统是指车辆根据自身传感器感知周围停车位,通常包含超声波雷达、摄像头等,当探测到符合要求的车位后,通过内部算法规划泊车路径,车辆控制车辆横向、纵向模块,自动泊入停车位的系统。目前量产较多的包含半自动泊车系统、自动泊车系统、遥控泊车系统等。
自动泊车辅助系统可以帮助新手司机快捷而方便的将车泊入适当的停车位上,对新手司机来说是“福音”。但是由于自动泊车辅助系统技术还未成熟,还有需要改进的地方。因此在系统开发阶段,需要经过大量的测试,通常的做法是将自动泊车辅助系统泊车指标与“老司机”进行对标,以追求更好的用户体验。
自动泊车辅助系统将车辆泊入车位后,技术人员需要对泊入后试验车辆的位姿进行评价,目前是直接通过人工找出车身前、后、左、右侧的外沿参考点,用手工拉皮尺的方式去测量车身四周距离边界的距离,之后利用测量的距离,通过算术公式计算出泊入后的车身倾斜角度。
但是,手工测量的方式读取车身数据费时费力,通常需要一边测量,一边记录数据,一般需要两人一组才能较快的完成,效率较低,并且人工测量降低了测试的准确率。
发明内容
本申请提供一种自动化泊车测试方法、装置以及系统,通过相机、感应器获得车位和泊车完成后的车辆信息,依此获得车辆的位姿信息,实现对泊车性能的评价,代替人工测量,提高了测试效率和测试准确度。
本申请提供了一种自动化泊车测试方法,包括:
接收车位的拍摄图像;
对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标;
接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号;
依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系;
依据位置关系对泊车性能进行评价;
其中,测试面板覆盖在车位的正上方,测试面板的底面上排布多个感应点,车辆的外边缘上设有多个竖直向上发射感应信号的发射器。
优选地,拍摄车位的相机内嵌在测试面板的底面上。
优选地,依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系,具体包括:
计算车辆的前保险杠最外沿对应的感应点的坐标与车位的前边界线之间的第一距离以及车辆的后保险杠最外沿对应的感应点的坐标与车位的后边界线之间的第二距离;
分别计算车辆的左前轮和左后轮对应的感应点的坐标与车位的左边界线之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点的坐标与车位的右边界线之间的第五距离和第六距离;
分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值;
依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
优选地,自动化泊车测试方法还包括:
响应于车辆开始泊车而记录开始时间;
响应于车辆结束泊车而记录结束时间;
利用开始时间和结束时间计算泊车时间。
优选地,自动化泊车测试方法还包括:
泊车过程中,接收车辆发出的档位信息;
泊车结束后,依据车辆发出的所有档位信息计算泊车过程中的揉库次数。
本申请还提供一种自动化泊车测试装置,包括图像接收模块、图像分析模块、感应信号接收模块、位置关系获得模块以及评价模块;
图像接收模块用于接收车位的拍摄图像;
图像分析模块用于对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标;
感应信号接收模块用于接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号;
位置关系获得模块用于依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系;
评价模块用于依据位置关系对泊车性能进行评价;
其中,测试面板覆盖在车位的正上方,测试面板上排布多个感应点,车辆的外边缘上设有多个竖直向上发射的感应信号发射器。
优选地,位置关系获得模块包括前后距离计算模块、左右距离计算模块、倾斜角计算模块以及位姿获得模块;
前后距离计算模块用于计算车辆的前保险杠最外沿对应的感应点的坐标与车位的前边界线之间的第一距离以及车辆的后保险杠最外沿对应的感应点的坐标与车位的后边界线之间的第二距离;
左右距离计算模块用于分别计算车辆的左前轮和左后轮对应的感应点的坐标与车位的左边界线之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点的坐标与车位的右边界线之间的第五距离和第六距离;
倾斜角计算模块用于分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值;
位姿获得模块用于依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
优选地,自动化泊车测试装置还包括记录模块和泊车时间计算模块;
记录模块用于响应于车辆开始泊车而记录开始时间,并响应于车辆结束泊车而记录结束时间;
泊车时间计算模块用于利用开始时间和结束时间计算泊车时间。
优选地,自动化泊车测试装置还包括档位信息接收模块以及揉库次数计算模块;
档位信息接收模块用于在泊车过程中,接收车辆发出的档位信息;
揉库次数计算模块用于依据车辆发出的所有档位信息计算泊车过程中的揉库次数。
本申请还提供一种自动化泊车测试系统,包括测试组件和上位机,测试组件包括设置于车位正上方的测试面板和相机,上位机用于执行上述的自动化泊车测试方法。
通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
附图说明
被结合在说明书中并构成说明书的一部分的附图示出了本申请的实施例,并且连同其说明一起用于解释本申请的原理。
图1为本申请提供的自动化泊车测试系统的结构图;
图2为本申请提供的测试组件的一个实施例的结构示意图;
图3为本申请提供的自动化泊车测试方法的流程图;
图4为本申请提供的车辆位姿示意图;
图5为本申请提供的自动化泊车测试装置的结构图。
具体实施方式
现在将参照附图来详细描述本申请的各种示例性实施例。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本申请的范围。
以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本申请及其应用或使用的任何限制。
对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,技术、方法和设备应当被视为说明书的一部分。
在这里示出和讨论的所有例子中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它例子可以具有不同的值。
本申请提供一种自动化泊车测试方法、装置以及系统,通过相机、感应器获得车位和泊车完成后的车辆信息,依此获得车辆的位姿信息,实现对泊车性能的评价,代替人工测量,提高了测试效率和测试准确度。另外,本申请中,测试面板的底面由多个黑白相间的正方形棋盘格组成,每个棋盘格具有唯一的编号,并且每个棋盘格上设有一个感应点,由此可以快捷地确定车辆外边缘上特定点的坐标,进一步提高了测试效率和准确度。
需要说明的是,本申请适用于自动泊车系统和遥控泊车系统,支持垂直、水平、斜列等多种车位类型,并支持线车位和由障碍物构成的空间车位。
如图1所示,本申请提供的自动化泊车测试系统包括测试组件110和上位机120。测试组件110包括设置于车位正上方的测试面板和相机,测试面板用于检测泊车结束后车辆的外边缘信息,相机用于拍摄车位。上位机通过有线/无线传输方式与测试面板、相机和车辆信号连接,用于接收测试面板、相机以及车辆的信息,并依据所有信息确定测试结果,自动化出具测试报告。
作为一个实施例,如图2所示,测试组件110包括两个固定连接的三角支撑架1101、设置在两个三角支撑架1101之间的横梁上的转轴1102以及测试面板1103和相机1104。
三角支撑架1101的稳定性较强,用来给测试面板1103做固定和支撑。转轴1102的驱动器与上位机120信号连接,转轴1102用于带动测试面板1103相对于三角支撑架1101进行折叠和伸展。车辆与测试装置之间的距离在预设范围内,并点火启动时,向上位机120发送点火信息,上位机120控制转轴1102自动伸展测试面板1103。待测试完成后,上位机120控制转轴1102自动折叠测试面板1103。
伸展状态下,测试面板1103平行于地面,并覆盖在车位的正上方。测试面板1103的底面上排布多个感应点,用于感应车辆的外边缘上设置的多个发射器发出的竖直向上的感应信号,只有发射器正上方的感应点才能接收到其感应信号,由此,通过具有感应信号的感应点的坐标即可快速获得车辆的外边缘的位置信息。
作为一个实施例,如图2所示,相机1104内嵌在测试面板1103的底面上。
作为一个实施例,感应点为光感传感器。车辆的外边缘上指定位置(包括前保险杠、后保险杠、左前车轮、左后车轮、右前车轮、右后车轮等)上设有红外发射器,用于发射红外光束。
优选地,如图2所示,测试面板1103的底面由多个黑白相间的正方形棋盘格组成,每个棋盘格具有唯一的编号,并且每个棋盘格上设有一个感应点。由此,每个感应点与一个编号对应,上位机接收到该感应点的感应信号后,可以依据感应点对应的编号直接确定感应点的坐标。
优选地,每个三角支撑架1101的下端均设有万向轮1105,方便测试组件的移动。将测试组件移动到指定位置后,通过锁紧万向轮1105使测试组件定位。
优选地,自动化泊车测试系统还包括移动终端和/或车机,上位机120通过无线网络与移动终端和/或车机信号连接,将测试结果传输到移动终端和/或车机,便于用户快速知晓泊车情况。
实施例一
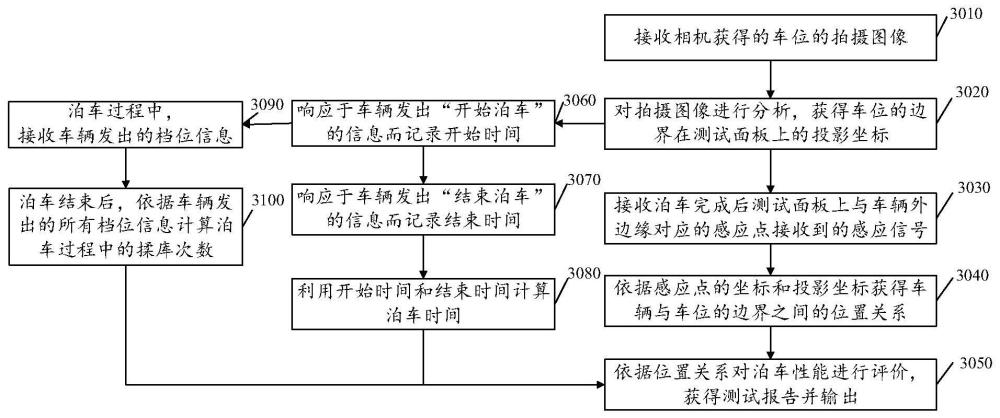
基于上述,如图3所示,本申请提供的自动化泊车测试方法适用于上位机,具体包括:
S3010:接收相机获得的车位的拍摄图像。
具体地,上位机接收到车轮的点火信息后,控制相机对测试面板下方的车位进行拍摄,获得车位的拍摄图像。相机将拍摄图像传输给上位机。
S3020:对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标。具体地,上位机依据拍摄图像获得车位的边界的像素位置,并将边界的像素位置映射为测试面板上的对应坐标。
以水平标准线车位为例,如图4所示,上位机依据拍摄图像获得车位的四个角点在测试面板上投影的坐标点A、B、C、D。
S3030:接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号。
如图4所示,F、R分别表示车辆前保险杠和后保险杠的最外沿对应的测试面板上的感应点,LF、LR分别为车辆的左前轮、左后轮对应的测试面板上的感应点,RF、RR分别为车辆的右前轮、右后轮对应的测试面板上的感应点。以上感应点的坐标通过测试面板输入给上位机。
S3040:依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系。
具体地,结合图4,依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系,具体包括:
S30401:计算车辆的前保险杠最外沿对应的感应点F的坐标与车位的前边界线AB之间的第一距离以及车辆的后保险杠最外沿对应的感应点R的坐标与车位的后边界线CD之间的第二距离。
S30402:分别计算车辆的左前轮和左后轮对应的感应点LF、LR的坐标与车位的左边界线BC之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点RF、RR的坐标与车位的右边界线AD之间的第五距离和第六距离。
S30403:分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值。
S30404:依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
S3050:依据位置关系对泊车性能进行评价,获得测试报告并输出。
优选地,在S3020与S3030之间的泊车过程中,还包括如下步骤:
S3060:上位机响应于车辆发出“开始泊车”的信息而记录开始时间t1。
S3070:响应于车辆发出“结束泊车”的信息而记录结束时间t2。
S3080:利用开始时间t1和结束时间t2计算泊车时间(t2-t1)。
在上述基础上,优选地,S3060与S3070之间的泊车过程中,还包括:接收车辆发出的档位信息(S3090)。并且泊车结束后,依据车辆发出的所有档位信息计算泊车过程中的揉库次数(3100)。
在上述基础上,S3050中,利用车辆与车位的边界之间的位置关系、泊车时间、揉库次数等数据对泊车性能进行评价,获得测试报告并直接输出给移动终端和/或车机,实现整个测试过程的自动化,并且提高了测试结果的准确性和测试效率。
实施例二
基于上述自动化泊车测试方法,本申请还提供一种自动化泊车测试装置。如图5所示,自动化泊车测试装置包括图像接收模块5010、图像分析模块5020、感应信号接收模块5030、位置关系获得模块5040以及评价模块5050。
图像接收模块5010用于接收车位的拍摄图像。
图像分析模块5020用于对拍摄图像进行分析,获得车位的边界在测试面板上的投影坐标。
感应信号接收模块5030用于接收泊车完成后测试面板上与车辆外边缘对应的感应点接收到的感应信号。
位置关系获得模块5040用于依据感应点的坐标和投影坐标获得车辆与车位的边界之间的位置关系。
评价模块5050用于依据位置关系对泊车性能进行评价。
其中,测试面板覆盖在车位的正上方,测试面板上排布多个感应点,车辆的外边缘上设有多个竖直向上发射的感应信号发射器。
作为一个实施例,位置关系获得模块5040包括前后距离计算模块50401、左右距离计算模块50402、倾斜角计算模块50403以及位姿获得模块50404。
前后距离计算模块50401用于计算车辆的前保险杠最外沿对应的感应点的坐标与车位的前边界线之间的第一距离以及车辆的后保险杠最外沿对应的感应点的坐标与车位的后边界线之间的第二距离。
左右距离计算模块50402用于分别计算车辆的左前轮和左后轮对应的感应点的坐标与车位的左边界线之间的第三距离和第四距离,并分别计算车辆的右前轮和右后轮对应的感应点的坐标与车位的右边界线之间的第五距离和第六距离。
倾斜角计算模块50403用于分别计算车辆的左前轮与左后轮的横坐标的差值和纵坐标的差值,或分别计算车辆的右前轮与右后轮的横坐标的差值和纵坐标的差值,作为第一差值和第二差值。
位姿获得模块50404用于依据第一距离、第二距离、第三距离、第四距离、第五距离、第六距离、第一差值以及第二差值确定车辆对于车位的姿态,作为车辆与车位的边界之间的位置关系。
优选地,自动化泊车测试装置还包括记录模块5060和泊车时间计算模块5070。
记录模块5060用于响应于车辆开始泊车而记录开始时间,并响应于车辆结束泊车而记录结束时间。
泊车时间计算模块5070用于利用开始时间和结束时间计算泊车时间。
优选地,自动化泊车测试装置还包括档位信息接收模块5080以及揉库次数计算模块5090。
档位信息接收模块5080用于在泊车过程中,接收车辆发出的档位信息。
揉库次数计算模块5090用于依据车辆发出的所有档位信息计算泊车过程中的揉库次数。
虽然已经通过例子对本申请的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上例子仅是为了进行说明,而不是为了限制本申请的范围。本领域的技术人员应该理解,可在不脱离本申请的范围和精神的情况下,对以上实施例进行修改。本申请的范围由所附权利要求来限定。
- 一种辅助泊车装置、系统及辅助泊车方法
- 一种电能表自动化检定系统接线柱压力测试方法及装置
- 一种电能表自动化检定系统视觉识别测试方法及装置
- 一种电能表自动化检定系统接拆线成功率测试方法及装置
- 一种自动化测试系统及自动化测试方法
- 一种自动泊车系统的性能测试方法及装置
- 自动泊车系统的测试方法和装置