一种软镜机器人的驱动系统以及软镜机器人
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及医疗机器人技术领域,特别是涉及一种软镜机器人的驱动系统以及软镜机器人。
背景技术
通过医疗机器人进行内窥镜检查和治疗,是现代临床上常用的检查手段和治疗方法,亦是微创诊断和治疗的发展方向。例如,肾输尿管软镜常被用做泌尿科的肾输尿管疾病的检查和治疗,支气管镜常被用做呼吸科的支气管和肺部疾病的检查和治疗,胃镜和肠镜常被用做消化道疾病的检查和治疗等。这些内窥镜设备经过人体天然的泌尿系统或呼吸系统腔道或消化道,对人体内部病变位置进行相应检查和治疗,无需对人体进行任何切口,具有损伤小、疼痛轻、恢复快等微创优点,已被广泛应用在外科的诊疗中,成为主要的临床诊疗方法。
以软镜机器人为例,传统的软镜机器人系统通过驱动支气管镜在人体腔道内前进、后退、旋转并最终达到指定位置进行工作,支气管镜难免会与人体组织接触,因此,为了保持医疗工作中的安全卫生,现有的支气管镜往往是一次性使用的。
但是,现有的软镜机器人系统中,为了精确控制支气管镜的移动和工作,驱动结构往往设计得很复杂,而且与支气管镜连接牢固,因此使用前后的拆装步骤多,操作困难,在需要反复拆装使用的医疗工作环境中,使用不方便。
因此,现有技术还有待于改进和发展。
发明内容
鉴于上述现有技术的不足,本发明的目的在于提供一种软镜机器人的驱动系统以及软镜机器人,旨在解决现有的软镜机器人使用过程中装配不灵活,使用不方便的问题。
本发明的技术方案如下:
一种软镜机器人的驱动系统,用于驱动所述软镜机器人的支气管镜;其中,包括驱动仓、器械仓、转轴部件和吸痰部件,所述驱动仓的顶部设置有第一驱动部件和第二驱动部件;所述器械仓设置在所述驱动仓的上方,用于对接所述支气管镜;所述器械仓与所述驱动仓可拆卸装配;所述器械仓的底面形成有第一装配通孔和第二装配通孔;所述转轴部件设置在所述器械仓内,用于盘绕所述支气管镜的牵引绳;所述转轴部件插设在所述第一装配通孔内;所述吸痰部件设置在所述器械仓内,用于连接所述支气管镜的吸痰导管;所述吸痰部件插设在所述第二装配通孔内;当所述驱动仓与所述器械仓装配时,所述第一驱动部件插入至所述第一装配通孔内,与所述转轴部件传动连接;所述第二驱动部件插入至所述第二装配通孔内,与所述吸痰部件传动连接。
所述的软镜机器人的驱动系统,其中,所述第一驱动部件设置有2-4个,所述转轴部件与所述第一驱动部件对应设置;每一所述转轴部件连接一条所述牵引绳。
所述的软镜机器人的驱动系统,其中,所述第一驱动部件和所述转轴部件均设置四个,四个所述转轴部件两两一组,对称分布在所述器械仓的两侧;并且,每一组所述转轴部件上盘绕牵引绳的方向相同。
所述的软镜机器人的驱动系统,其中,所述第一驱动部件包括第一驱动电机、第一传动组件和第一伞形齿轮,所述第一驱动电机设置在所述驱动仓内;所述第一传动组件设置在所述驱动仓上;所述第一传动组件的底端延伸至所述驱动仓内,与所述第一驱动电机的动力输出端传动连接;所述第一伞形齿轮设置在所述第一传动组件的顶端;所述转轴部件的底端设置有第一连接部,所述第一连接部与所述第一伞形齿轮啮合传动。
所述的软镜机器人的驱动系统,其中,所述第一传动组件包括法兰座和弹性件,所述法兰座一侧套设在所述第一驱动电机的动力输出端上,另一侧形成有滑动槽;所述弹性件和所述第一伞形齿轮堆叠设置于所述滑动槽内,所述弹性件用于弹性支撑所述第一伞形齿轮。
所述的软镜机器人的驱动系统,其中,所述第一伞形齿轮的侧壁上设置有骨位,所述法兰座内设置轴向延伸的卡槽,所述骨位与所述卡槽相配合,所述卡槽用于约束所述骨位。
所述的软镜机器人的驱动系统,其中,所述吸痰部件包括:三通端头、器械管道、吸痰阀门、连接软管、镜体转轴和传动齿轮组,所述三通端头固定在所述器械仓内,包括相对设置的第一端口、第二端口,和位于侧面的第三端口,所述第一端口上设有密封帽;所述器械管道设置在所述器械仓内,与所述第二端口对接;所述吸痰阀门设置在所述器械仓内,与外部的真空发生设备连接;所述连接软管一端与所述吸痰阀门连接,另一端与所述第三端口对接。
所述的软镜机器人的驱动系统,其中,所述第二驱动部件包括第二驱动电机、第二传动组件和第二伞形齿轮,所述第二驱动电机设置在所述驱动仓内;所述第二传动组件设置在所述驱动仓上;所述第二传动组件的底端延伸至所述驱动仓内,与所述第二驱动电机的输出端传动连接;所述第二伞形齿轮设置在所述第二传动组件的顶端;所述吸痰阀门的底端设置有第二连接部,所述第二连接部与所述第二伞形齿轮啮合传动,所述第二驱动电机用于驱动所述吸痰阀门转动,打开或关闭与外部真空设备的连接。
所述的软镜机器人的驱动系统,其中,所述第二驱动部件还包括第三驱动电机、第三传动组件和第三伞形齿轮,所述第三驱动电机设置在所述驱动仓内;所述第三传动组件设置在所述驱动仓上;所述第三传动组件的底端延伸至所述驱动仓内,与所述第三驱动电机的输出端传动连接;所述第三伞形齿轮设置在所述第三传动组件的顶端;所述镜体转轴设置在所述器械仓内;所述传动齿轮组一端连接至所述镜体转轴,另一端连接至所述支气管镜;所述镜体转轴的底端设置有第三连接部,所述第三连接部与所述第三伞形齿轮啮合传动,所述第三驱动电机用于驱动所述传动齿轮组转动,进而带动所述支气管镜转动。
本申请还公开了一种软镜机器人,其中,包括支气管镜和第三驱动部件,以及如上任一所述的软镜机器人的驱动系统,所述支气管镜连接至所述器械仓内,所述第一驱动部件用于驱动所述支气管镜前端的转向操作,所述第二驱动部件用于驱动所述支气管镜的吸痰操作和/或转动操作,所述第三驱动部件用于驱动所述支气管镜的前进和/或后退操作,所述支气管镜用于介入被检测体以进行检测和/或吸取痰液。
与现有技术相比,本发明实施例具有以下优点:
本发明公开的驱动系统用于驱动软镜机器人的支气管镜,驱动仓内设置的第一驱动部件和第二驱动部件用于提供动力,器械仓内设置的转轴部件和吸痰部件用于连接和控制支气管镜,通过驱动支气管镜在人体内移动以及移动到位之后驱动支气管镜进行吸痰、检查、手术等动作,完成微创介入工作。
在单次工作结束之后,由于医疗器材只能一次性使用,因此需要更换新的支气管镜才能再次工作,设置驱动仓与器械仓可拆卸装配,方便将器械仓从驱动仓上拆除,以进行支气管镜的拆装工作,方便达到可以快速更换的效果;更换支气管镜之后,只需要将器械仓装回到驱动仓上,同时完成转轴部件与第一驱动部件的传动连接,吸痰部件与第二驱动部件的传动连接,可快速完成组装流程,从而便于提高软镜机器人的使用效率,方便使用。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
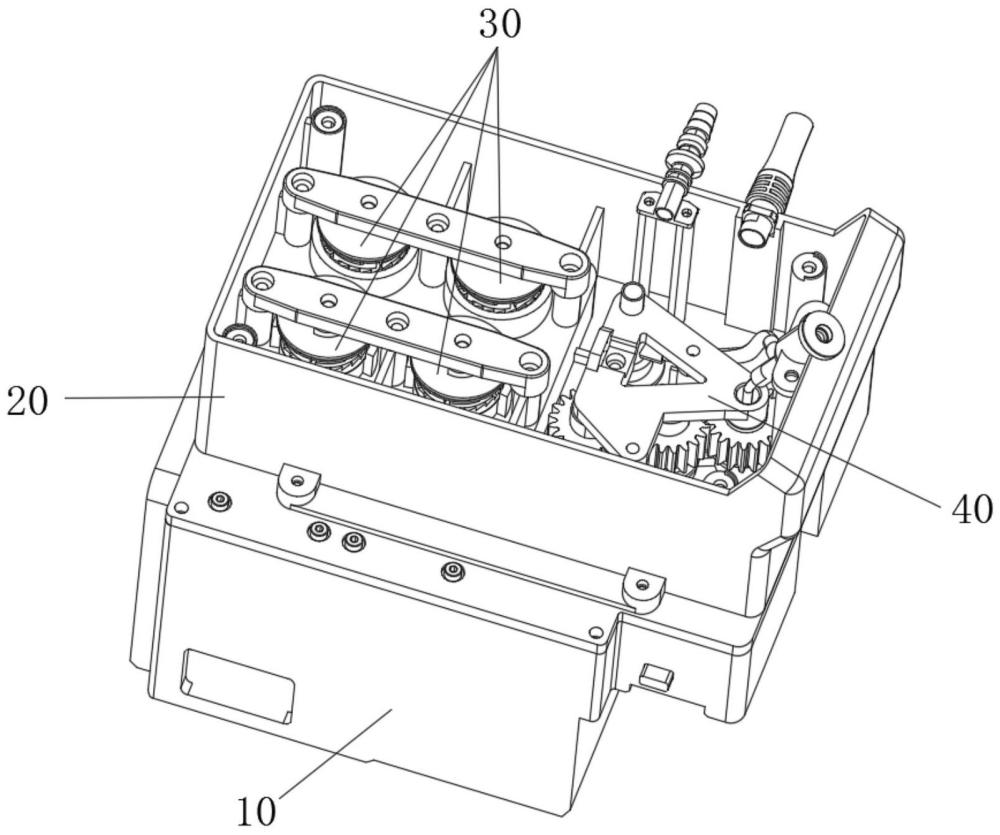
图1为本发明中软镜机器人的驱动系统的结构示意图;
图2为本发明中软镜机器人的驱动系统的部分结构示意图;
图3为本发明中软镜机器人的驱动系统的结构爆炸图;
图4为本发明中软镜机器人的驱动系统的沿轴线方向的截面图;
图5为本发明中软镜机器人的驱动系统的部分结构示意图;
图6为图5中沿AA`方向的截面图;
图7中本发明中软镜机器人的驱动系统的部分结构示意图。
其中,10、驱动仓;11、第一驱动部件;111、第一驱动电机;112、第一传动组件;1121、法兰座;1121a、滑动槽;1122、弹性件;113、第一伞形齿轮;12、第二驱动部件;121、第二驱动电机;122、第二传动组件;123、第二伞形齿轮;124、第三驱动电机;125、第三传动组件;126、第三伞形齿轮;127、镜体转轴;1271、第三连接部;128、传动齿轮组;20、器械仓;21、第一装配通孔;22、第二装配通孔;30、转轴部件;31、第一连接部;40、吸痰部件;41、三通端头;42、器械管道;43、吸痰阀门;431、第二连接部;44、连接软管。
具体实施方式
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参阅图1、图2和图3,本发明申请的一实施例中,公开了一种软镜机器人的驱动系统,用于驱动所述软镜机器人的支气管镜;其中,包括驱动仓10、器械仓20、转轴部件30和吸痰部件40,所述驱动仓10的顶部设置有第一驱动部件11和第二驱动部件12;所述器械仓20设置在所述驱动仓10的上方,用于对接所述支气管镜;所述器械仓20与所述驱动仓10可拆卸装配;所述器械仓20的底面形成有第一装配通孔21和第二装配通孔22;所述转轴部件30设置在所述器械仓20内,用于盘绕所述支气管镜的牵引绳;所述转轴部件30插设在所述第一装配通孔21内;所述吸痰部件40设置在所述器械仓20内,用于连接所述支气管镜的吸痰导管;所述吸痰部件40插设在所述第二装配通孔22内;当所述驱动仓10与所述器械仓20装配时,所述第一驱动部件11插入至所述第一装配通孔21内,与所述转轴部件30传动连接;所述第二驱动部件12插入至所述第二装配通孔22内,与所述吸痰部件40传动连接。
本实施例公开的驱动系统用于驱动软镜机器人的支气管镜,驱动仓10内设置的第一驱动部件11和第二驱动部件12用于提供动力,器械仓20内设置的转轴部件30和吸痰部件40用于连接和控制支气管镜,通过驱动支气管镜在人体内转动或转向以及驱动支气管镜进行吸痰、检查、手术等动作,完成微创介入工作。
在单次工作结束之后,由于医疗器材只能一次性使用,因此需要更换新的支气管镜才能再次工作,驱动仓10一般设置在固定平台或者机器人的机械臂上,设置驱动仓10与器械仓20可拆卸装配,方便将器械仓20从驱动仓10上拆除,以独立进行支气管镜的拆装工作,不用调整固定平台,或者调整机械臂的位置,方便达到便捷更换的效果。更换支气管镜之后,只需要将器械仓20装回到驱动仓10上,同时完成转轴部件30与第一驱动部件11的传动连接,吸痰部件40与第二驱动部件12的传动连接,可快速完成组装流程,从而便于提高软镜机器人的使用效率,方便使用。
具体的,本实施例中公开的牵引绳包括但不限于钢丝绳,通过钢丝绳焊接到支气管镜的端部,保持稳定连接,而且钢丝绳的抗拉性能好,可以通过转轴反复收放而保持张紧,松动几率小,有利于维持驱动系统的控制精度。
如图3所示,作为本实施例的一种实施方式,公开了所述第一驱动部件11设置有2-4个,所述转轴部件30与所述第一驱动部件11对应设置;每一所述转轴部件30连接一条所述牵引绳。
本实施例中公开的器械仓20内设置2-4个第一驱动部件11,从而可以控制2-4个转轴部件30旋转,也就是说器械仓20中可以控制2-4条牵引绳,将多条牵引绳均匀分布在支气管镜的径向截面的上、下、左、右四个方向上,当设置两条牵引绳时,两条牵引绳之间间隔180°,当设置四条牵引绳时,每两条牵引绳之间间隔90°;其中,一个转轴部件30旋转,收缩一条牵引绳时支气管镜就会向单侧偏转,使支气管镜的端头转向,增加支气管镜的探查范围,减小支气管镜侧面的探查盲区,提高支气管镜使用的灵活性。
具体的,作为本实施例的另一种实施方式,公开了所述第一驱动部件11和所述转轴部件30均设置四个,四个所述转轴部件30两两一组,对称分布在所述器械仓20的两侧;并且,每一组所述转轴部件30上盘绕牵引绳的方向相同。
本实施例中设置四条牵引绳时,呈十字交叉形布置,处于x轴上的两条牵引绳和处于y轴上的两条牵引绳可分别视为两组协同配合的控制绳组,同一组的两条牵引绳一条收缩,另一条则伸长,且都保持紧绷状态,避免产生虚位的情况,达到精确控制支气管镜向一侧转动的效果。两组控制绳组分别控制支气管镜沿其径向截面的x轴或者y轴转动,配合支气管镜的伸缩移动,有利于对人体内部组织进行三维视角的观察和检测。
本实施例中公开的器械仓20为了保持平衡,可以将支气管镜的连接位置设于器械仓20的中线上,与位于器械仓20中线上的吸痰部件40对接,从而支气管镜的牵引绳沿着器械仓20的中线排布,连接到转轴部件30上,四个转轴部件30分为两组位于器械仓20的两侧,为了尽可能保持牵引绳沿器械仓20的中线排布,减少倾斜,可设置器械仓20的中线两侧的不同组的转轴部件30上盘绕牵引绳的方向相反,同一组的转轴部件30上盘绕牵引绳的方向则相同,使得四条牵引绳都趋近于平行排布,使得器械仓20内牵引绳的排布更加规则,避免牵引绳相互缠绕的情况发生。
具体的,在实际操作过程中,在软镜机器人完成探查或者手术工作之后,本实施例中设置的四个转轴部件30可同时放松牵引绳,四条牵引绳处于松弛状态,使支气管镜回归柔性状态,从而更方便支气管镜从腔道中退出。
如图2、图4和图5所示,作为本实施例的另一种实施方式,所述第一驱动部件11包括第一驱动电机111、第一传动组件112和第一伞形齿轮113,所述第一驱动电机111设置在所述驱动仓10内;所述第一传动组件112设置在所述驱动仓10上;所述第一传动组件112的底端延伸至所述驱动仓10内,与所述第一驱动电机111的动力输出端传动连接;所述第一伞形齿轮113设置在所述第一传动组件112的顶端;所述转轴部件30的底端设置有第一连接部31,所述第一连接部31与所述第一伞形齿轮113啮合传动。
本实施例中通过第一驱动电机111进行驱动,第一传动组件112和第一伞形齿轮113装配精度高,利用机械传动的方式,可以精确镜体转轴部件30的转动角度,从而高精度控制牵引绳的伸缩量,达到精确控制支气管镜的转动角度的效果。
具体的,本实施例中第一驱动电机111可以设置为步进电机、马达等驱动器械,其动力输出轴与第一传动组件112连接,驱动第一传动组件112转动;将第一驱动电机111设置在驱动仓10内部,有利于对第一驱动电机111进行固定和保护。
具体的,本实施例中设置第一伞形齿轮113与第一连接部31啮合,保持传动的精度,同时第一伞形齿轮113的斜面还具有导向作用,在装配过程中,第一伞形齿轮113的斜面与第一连接部31的侧壁接触,并将第一伞形齿轮113导向第一装配通孔21中,有利于快速完成器械仓20与驱动仓10的对位配合,提高器械仓20的拆装速度,进而提高软镜机器人的使用效率。
具体的,所述第一连接部31的侧壁上设置多个卡齿,与第一伞形齿轮113适配,从而形成稳定的传动连接,第一伞形齿轮113被第一传动组件112带动旋转时,同步带动转轴部件30转动。
如图6所示,作为本实施例的另一种实施方式,公开了所述第一传动组件112包括法兰座1121和弹性件1122,所述法兰座1121一侧套设在所述第一驱动电机111的动力输出端上,另一侧形成有滑动槽1121a;所述弹性件1122和所述第一伞形齿轮113堆叠设置于所述滑动槽1121a内,并且,实际制造时,第一伞形齿轮113上与弹性件1122接触的一侧可以设置内槽,弹性件1122一端抵在滑动槽1121a的底面上,另一端插入内槽中,与内槽的顶面抵接;所述弹性件1122用于弹性支撑所述第一伞形齿轮113。
本实施例中公开的软镜机器人工作过程中,驱动仓10与器械仓20需要反复拆装,以便更换支气管镜,做到一次性使用支气管镜,保证医疗工作的安全卫生。在驱动仓10和器械仓20反复拆装过程中,第一伞形齿轮113与转轴部件30多次接触,难免产生碰撞,容易磨损,长期使用后容易影响装配精度。
本实施例中设置弹性件1122支撑第一伞形齿轮113,当第一伞形齿轮113与转轴部件30接触并产生相对挤压时,第一伞形齿轮113在滑动槽1121a内向下滑动,弹性件1122适当收缩,起到缓冲作用,将第一伞形齿轮113与转轴部件30之间的硬性碰撞转化为柔性碰撞,减少损伤,有利于延长器械仓20的使用寿命,维持驱动系统工作的使用精度。
另外,本实施例中的弹性件1122提供的弹力将第一伞形齿轮113推向第一连接部31,两者之间接触紧密,避免第一伞形齿轮113出现悬空、虚位的情况,因此有利于维持第一伞形齿轮113与转轴部件30之间高度贴合,以便达到良好的传动效果。
具体的,作为本实施例的另一种实施方式,公开了所述第一伞形齿轮113的侧壁上设置有骨位,所述法兰座1121内设置轴向延伸的卡槽,所述骨位与所述卡槽相配合,所述卡槽用于约束所述骨位。本实施例中通过卡槽约束骨位,从而避免出现第一伞形齿轮113从滑动槽1121a中脱出的情况发生,提高第一传动组件112的可靠性。
具体的,本实施例中公开的弹性件1122包括但不限于弹簧、弹性橡胶圈、弹性乳胶圈、金属弹片等结构,通过弹性件1122的弹性对第一伞形齿轮113起到弹性支撑的作用。需要说明的是,本实施例中只是例举弹性件1122的类型,但本发明的保护范围并不局限于此,其他类型的弹性件1122只要能达到本申请公开的技术效果,作为本发明构思的等同替换,也应在本申请保护的范围之内。
如图7所示,作为本实施例的另一种实施方式,公开了所述吸痰部件40包括:三通端头41、器械管道42、吸痰阀门43和连接软管44,所述三通端头41固定在所述器械仓20内,包括相对设置的第一端口、第二端口,和位于侧面的第三端口,所述第一端口上设置有密封帽;所述器械管道42设置在所述器械仓20内,与所述第二端口对接,用于对支气管镜上设置的吸痰导管内的痰液进行导流;所述吸痰阀门43设置在所述器械仓20内,与外部的真空发生设备连接;所述连接软管44一端与所述吸痰阀门43连接,另一端与所述第三端口对接。
本实施例中公开的驱动系统用于软镜机器人,软镜机器人通过人体气道介入,对于一些肺部产生病变的患者来说,肺部气道内可能有痰液,容易出现阻挡支气管镜移动或者干扰手术操作的问题,因此在支气管镜上设置吸痰导管,通过吸痰部件40连接吸痰导管,将痰液吸出,有利于增加自然腔道内的空间,方便支气管镜灵活地移动和探查。
本实施例中的三通端头41同时连接器械仓20内的连接软管44和器械管道42,器械管道42通过支气管镜的器械通道贯穿支气管镜的镜体,并通过支气管镜头端的器械口伸出,进行吸痰或其他介入手术操作;连接软管44可以采用硅胶管或者乳胶管,用于对接吸痰阀门43,吸痰阀门43与外部的抽吸泵连接,当支气管镜移动过程中遇到痰液阻碍,通过打开吸痰阀门43,使得外部的真空发生设备如抽吸泵与连接软管44导通,则立即产生负压,吸痰时,痰液从器械管道42内抽出,流入连接软管44内,通过连接软管44导出痰液,完成吸痰动作。
具体的,本实施例中公开的三通端头41的第一端口上设置有硅胶帽,在吸痰动作完成后,将吸痰阀门43关闭,此时则可以刺破硅胶帽,通过第一端口将活检钳或者其他手术器械送入支气管镜内部的器械管道42中,直达病灶组织的位置,进行后续的手术操作。
可见,本实施例中公开的吸痰部件40将吸痰功能和控制功能结合在一起,通过机械配合,提高了对支气管镜的控制精度,而且结构简单,各零部件之间协同配合,占用空间小,有利于减小器械仓20的重量,方便器械仓20的拿取拆装。
如图2、图4和图5所示,作为本实施例的另一种实施方式,公开了所述第二驱动部件12包括第二驱动电机121、第二传动组件122和第二伞形齿轮123,所述第二驱动电机121设置在所述驱动仓10内;所述第二传动组件122设置在所述驱动仓10上;所述第二传动组件122的底端延伸至所述驱动仓10内,与所述第二驱动电机121的输出端传动连接;所述第二伞形齿轮123设置在所述第二传动组件122的顶端;所述吸痰阀门43的底端设置有第二连接部431,所述第二连接部431与所述第二伞形齿轮123啮合传动,所述第二驱动电机121用于驱动所述吸痰阀门43转动,打开或关闭与外部真空设备的连接。本实施例中通过第二伞形齿轮123与吸痰阀门43之间可拆卸地啮合装配,达到高精度传动的效果。
如图2、图5、图6和图7所示,作为本实施例的另一种实施方式,公开了所述第二驱动部件12还包括第三驱动电机124、第三传动组件125、第三伞形齿轮126、镜体转轴127和传动齿轮组128,实现支气管镜的转动操作。具体的,所述第三驱动电机124设置在所述驱动仓10内;所述第三传动组件125设置在所述驱动仓10上;所述第三传动组件125的底端延伸至所述驱动仓10内,与所述第三驱动电机124的输出端传动连接;所述第三伞形齿轮126设置在所述第三传动组件125的顶端;所述镜体转轴127设置在所述器械仓内,所述传动齿轮组128一端连接至所述镜体转轴127,另一端连接至所述支气管镜;所述镜体转轴127的底端设置有第三连接部1271,所述第三连接部1271与所述第三伞形齿轮126啮合传动,所述第三驱动电机124用于驱动所述传动齿轮组128转动,进而带动所述支气管镜转动。
通过第三伞形齿轮126与镜体转轴127可拆卸地啮合装配,达到快速实现准确对接,高精度传动的效果,有利于提高对支气管镜转动的控制精度。本实施例中的传动齿轮组128包括互相啮合传动的第一齿轮和第二齿轮,其中,镜体转轴127外部连接第一齿轮,支气管镜的镜体嵌套固定在第二齿轮上。当镜体转轴127转动时,驱动第一齿轮转动,从而带动第二齿轮转动,第二齿轮又会带动支气管镜的镜体一起转动,从而实现对支气管镜的转动操作。在一些实施例中,在第一齿轮和第二齿轮之间还设置一个或多个第三齿轮,用于避空设计和保持高精度传动。
具体的,作为本实施例的另一种实施方式,公开了所述第一驱动电机111、所述第二驱动电机121和所述第三驱动电机124相同;所述第一传动组件112、所述第二传动组件122和所述第三传动组件125相同;所述第一伞形齿轮113、所述第二伞形齿轮123和所述第三伞形齿轮126相同。通过设置相同的零部件进行组装使用,可以减少驱动系统内部的零件类型,简化装配步骤,降低生产成本。
综上,本实施例中同时在驱动仓10上设置第一驱动部件11和第二驱动部件12,在保证实现驱动仓10与器械仓20的灵活拆装的基础上,可以达到驱动仓10上的各零部件与器械仓20上的各零部件快速、准确地对位传动的效果,进一步方便实际操作过程中拆装器械仓20的操作,有利于加快更换一次性的支气管镜的速度,提高软镜机器人的使用效率。
具体的,作为本实施例的另一种实施方式,公开了所述转轴部件30包括棘轮轴和转轮,所述棘轮轴上设置有中杆,且所述棘轮轴上围绕所述中杆环形排列有若干个棘齿;所述转轮套设在所述中杆上,用于盘绕牵引绳体,所述转轮以所述中杆为轴转动;且所述转轮的边缘环形排列有若干个棘爪,所述棘爪与所述棘齿啮合配合。
本实施例公开的支气管镜的牵引绳缠绕在转轴部件30上,通过转轴部件30的转动控制牵引绳的收放动作,进而实现支气管镜的转动。
具体的,使用时转轮套在棘轮轴上,将牵引绳的尾端打结,并通过焊锡固定在转轮上,通过旋转转轮拉紧牵引绳;拉紧后,由于棘爪与棘齿的啮合配合产生的摩擦阻力会阻碍转轮的回转,所以牵引绳得以保持紧绷状态,不会发生因转轮回转而松脱的情况,使用过程中保持高灵敏度、高准确度的线驱传动效果,方便在软镜机器人上使用,更好地适应医疗场合中高标准的使用要求。
总之,本实施例公开的转轴部件30组装过程中,通过转动转轮可以自由调节牵引绳的张紧度,而且调整好之后,转轮不会意外回转,利用棘轮轴与转轮之间抵接接触产生的阻力可以对抗牵引绳的拉力,从而保持牵引绳的绷紧状态,有利于进行高精度的控制和传动,方便使用。
作为本申请的另一实施例,公开了包括支气管镜和第三驱动部件,以及如上任一所述的软镜机器人的驱动系统,所述支气管镜连接至所述器械仓20内,所述第一驱动部件11用于驱动所述支气管镜前端的转向操作,所述第二驱动部件12用于驱动所述支气管镜的吸痰操作和/或转动操作,所述第三驱动部件用于驱动所述支气管镜的前进和/或后退操作,所述支气管镜用于介入被检测体以进行检测和/或吸取痰液。
本实施例中支气管镜的前端有数段蛇骨结构连接而成,蛇骨结构的四侧各有一根钢丝作为牵引绳,钢丝焊接在蛇骨结构的最前一级,并依次穿过其他蛇骨预留的孔位,蛇骨结构后面的部分被弹簧管包住,以维持蛇骨结构在轴向方向上的刚性。因此,通过牵拉钢丝就能改变蛇骨结构内钢丝的长度,蛇骨结构的节与节之间摆动轴的两侧有间隙,拉动钢丝相当于缩小节与节之间的间隙,而另一侧放大间隙,使得蛇骨节绕摆动轴朝钢丝缩紧的一侧摆动,即实现控制支气管镜的摆动。
综上所述,本申请公开了一种软镜机器人的驱动系统,用于驱动所述软镜机器人的支气管镜;其中,包括驱动仓10、器械仓20、转轴部件30和吸痰部件40,所述驱动仓10的顶部设置有第一驱动部件11和第二驱动部件12;所述器械仓20设置在所述驱动仓10的上方,用于对接所述支气管镜;所述器械仓20与所述驱动仓10可拆卸装配;所述器械仓20的底面形成有第一装配通孔21和第二装配通孔22;所述转轴部件30设置在所述器械仓20内,用于盘绕所述支气管镜的牵引绳;所述转轴部件30插设在所述第一装配通孔21内;所述吸痰部件40设置在所述器械仓20内,用于连接所述支气管镜的吸痰导管;所述吸痰部件40插设在所述第二装配通孔22内;当所述驱动仓10与所述器械仓20装配时,所述第一驱动部件11插入至所述第一装配通孔21内,与所述转轴部件30传动连接;所述第二驱动部件12插入至所述第二装配通孔22内,与所述吸痰部件40传动连接。
本实施例公开的驱动系统用于驱动软镜机器人的支气管镜,驱动仓10内设置的第一驱动部件11和第二驱动部件12用于提供动力,器械仓20内设置的转轴部件30和吸痰部件40用于连接和控制支气管镜,通过驱动支气管镜在人体内移动以及移动到位之后驱动支气管镜进行吸痰、检查、手术等动作,完成微创介入工作。
在单次工作结束之后,由于医疗器材只能一次性使用,因此需要更换新的支气管镜才能再次工作,驱动仓10一般设置在固定平台或者机器人的机械臂上,设置驱动仓10与器械仓20可拆卸装配,方便将器械仓20从驱动仓10上拆除,以独立进行支气管镜的拆装工作,不用调整固定平台,或者调整机械臂的位置,方便达到便捷更换的效果。更换支气管镜之后,只需要将器械仓20装回到驱动仓10上,同时完成转轴部件30与第一驱动部件11的传动连接,吸痰部件40与第二驱动部件12的传动连接,可快速完成组装流程,从而便于提高软镜机器人的使用效率,方便使用。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互结合。
需要说明的是,本发明以软镜机器人的驱动系统为例对本发明的具体结构及工作原理进行介绍,但本发明的应用并不以软镜机器人的驱动系统为限,也可以应用到其它类似工件的生产和使用中。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种软镜夹持器及其在软镜手术辅助机器人上的安装结构
- 一种软镜夹持器及其在软镜手术辅助机器人上的安装结构