双量程电子秤
文献发布时间:2023-06-19 09:29:07
技术领域
本申请涉及电子秤的领域,尤其是涉及一种双量程电子秤。
背景技术
电子秤属于衡器的一种,利用胡克定律或力的杠杆平衡原理测定物体质量的工具。电子秤主要由承重系统、传力转换系统和示值系统三部分组成;称重系统可以是秤盘和秤体传力转换系统可以使杠杆传力系统和称重传感器,示值系统可以刻度盘和电子显示仪表。
现有申请号为CN201410098405.2的中国专利,公开了一种双量程电子秤,包括体重电子秤本体和厨房电子秤本体,该体重电子秤本体包括第一载物板、以及具有第一支撑脚的第一称重称重传感器模块;第一称重称重传感器模块位于第一载物板的正下方,各第一支撑脚位于体重电子秤本体的最底端;该厨房电子秤本体包括第二载物板、以及具有第二支撑脚的第二称重称重传感器模块;第二载物板位于第一载物板的正下方,各第一支撑脚低于第二载物板,第二称重称重传感器模块位于第一载物板的上方,各第二支撑脚的顶端位于第二支撑模块的最上端;第一载物板上设有透孔,各第二支撑脚的顶端穿过相应一个透孔并高出第一载物板。
针对上述中的相关技术,发明人认为,上述专利在使用过程中,需要将物品放在规定的第一载物板或者第二载物板上,才能使用到不同量程称重称重传感器模块,并且要注意不碰到另一个量程的称重称重传感器模块;但是物体的大小和重量并不一定成正比,因此在需要利用小量程称重称重传感器模块的时候,有可能触碰到大量程称重称重传感器模块上的结构,造成检测结果失准。
发明内容
为了提高电子秤的承重准确性,本申请提供一种双量程电子秤。
本申请提供的一种双量程电子秤,采用如下的技术方案:
一种双量程电子秤,包括底板座、承托座和称重传感器,还包括升降座、升降柱、支撑座、转向组件和升降组件,所述升降座设置在底板座上表面,所述升降座上表面设置有换向槽,所述升降柱穿设在换向槽内且与换向槽槽壁滑移连接,所述支撑座与称重传感器一一对应设置,所述支撑座设置在底板座上表面且位于升降座周侧,所述称重传感器设置在对应支撑座的顶端,所述承托座设置在升降柱的顶端,所述承托座下表面开设有让位槽,所述让位槽与不工作的所述称重传感器相对,所述承托座的下表面与工作的称重传感器抵接,所述升降组件设置在底板座上并用于驱动承托座升降,所述转向组件设置在底板座上并用于驱动承托座升降。
通过采用上述技术方案,根据所需量程的称重传感器,利用升降组件将承托座上抬,使得承托座远离升降柱,然后转向组件转动承托座,使得不工作的称重传感器与让位槽相对,然后下移承托座,使得承托座与所需量程的称重传感器抵接,不工作的称重传感器则由于与让位槽相对而不受力;从而只要将物品放在承托座的上表面,只有所需量程的称重传感器会感应物品的重量,从而本申请中各个量程的称重传感器之间的使用不相互影响,有效提高了对物品的称量准确性。
可选的,所述转向组件包括转向环座、驱动环齿和驱动齿轮,所述转向环座转动设置在底板座的上表面,所述转向环座位于支撑座周侧,所述驱动环齿设置在转向环座的外环壁上,所述驱动齿轮转动设置在底板座上表面,所述驱动齿轮与驱动环齿啮合,所述底板座上设置有第一电机,所述第一电机驱动驱动齿轮转动,所述升降组件设置在转向环座的上表面与承托座之间。
通过采用上述技术方案,第一电机驱动驱动齿轮转动,使得驱动齿轮与驱动环齿啮合,从而驱动环齿可以带动转向环座转动,转动转座即可支撑座和升降柱为转动点、升降组件为媒介,而带动承托座转动。
可选的,所述升降组件包括升降筒、升降杆、升降螺环、联动齿轮和让位弹簧,所述升降筒设置在转向环座的上表面,所述升降杆沿竖直方向滑移设置在升降筒内侧壁上,所述升降螺环转动设置在升降筒的顶端,所述升降螺环与升降杆螺纹连接,所述转向环座上表面设置有第二电机,所述联动齿轮设置在第二电机的顶端驱动端,所述联动齿轮与升降螺环的外环壁啮合,所述让位弹簧设置在升降杆底端与升降筒内底壁之间,当所述承托座工作时,所述升降螺环远离升降杆上的螺纹。
通过采用上述技术方案,第二电机驱动联动齿轮转动,联动齿轮通过啮合作用带动升降螺环转动,又由于升降杆只沿竖直方向滑移,因此升降杆与升降螺环之间可以发生螺纹转动,升降杆即可凭借螺纹进给来带动承托座升降;而且当承托座下移至规定位置时,升降螺环会远离升降杆上的螺纹,在让位弹簧的支撑作用下,升降杆可以在竖直方向上发生一定的移动,不会影响到称重传感器对承托座上物品的称重,而且在上移承托座的时候,利用让位弹簧的弹力,促使升降杆有向上的移动趋势,使得升降杆上的螺纹和升降螺环相对,然后驱动第二电机即可。
可选的,所述换向槽内周壁顶端设置有转向环槽,所述换向槽内周壁位于转向环槽下方设置有导向直槽,所述导向直槽顶端与转向环槽相通,所述升降柱底端设置有换向块,所述换向块与转向环槽或导向直槽滑移连接。
通过采用上述技术方案,在承托座升降的时候,换向块在对应的导向直槽中滑移,在承托座转动的时候,换向块可以在换向槽中转动,从而给导向直槽和转向环槽可以对升降柱进行导向,使得承托座更加稳定地进行升降和转向。
可选的,所述底板座上表面边缘处设置有让位环槽,所述承托座下表面边缘处设置有封闭环板,所述封闭环板与让位环槽插接。
通过采用上述技术方案,在承托座换向和正常工作的过程中,封闭环板始终位于让位环槽中,从而可以对承托座和底板座之间的结构进行防护。
可选的,所述承托座下表面设置有更换直槽,所述承托座下表面设置有导向槽,所述导向槽与更换直槽周壁相通,所述更换直槽周壁远离槽口的一端设置有卡接环槽,所述卡接环槽与导向槽相通,所述升降柱与更换直槽插接,所述升降柱的周壁设置有导向块,所述导向块通过导向槽滑入卡接环槽中且转动后与卡接环槽轴向侧壁抵接,所述承托座上设置有固定导向块的固定件,所述升降杆与承托座之间设置有可拆件。
通过采用上述技术方案,导向块通过导向槽滑入卡接环槽中,然后导向转动后即可与卡接环槽轴向侧壁抵接,即可沿着升降柱的轴向,将承托座和升降柱限位在一起,然后利用固定件将导向块固定在卡接环槽中,即可实现承托座与升降柱之间的可拆卸连接,不仅可以根据物品的大小跟换合适的承托座,也可以对损坏的承托座进行及时的维修和更换;同时升降安与承托座之间可拆卸连接,不会对承托座与升降柱之间的连接产生干涉。
可选的,所述固定件包括固定插杆、拉动板和固定弹簧,所述承托座的上表面设置有固定槽,所述固定槽槽壁贯穿设置有固定通槽,所述固定通槽与卡接环槽相通且远离导向槽,所述导向块朝向拉动板的一端设置有固定抵槽,所述拉动板滑移设置在固定槽槽壁上,所述固定插杆设置在拉动板与固定通槽相对的侧壁上,所述固定弹簧设置在拉动板下表面和固定槽槽壁之间;当所述固定弹簧处于自然状态,所述导向块与卡接环槽卡接时,所述固定插杆穿过固定通槽而插入固定抵槽中。
通过采用上述技术方案,在导向块滑到卡接环槽内的过程中,可以拉动拉动板,使得固定插杆远离卡接环槽,此时固定弹簧被拉伸;转动承托座,在导向块滑入卡接环槽内,固定抵槽和固定通槽相对后,停止对拉动板施力,则在固定弹簧的弹性回复力作用下,固定插杆可以与固定抵槽插接,导向块进行被限制在卡接环槽中。
可选的,所述可拆件包括插块、固定杆、拉板和复位弹簧,所述承托座的下表面设置在让位弧槽,所述让位弧槽的周向端壁上设置有插槽,所述插块设置在升降杆顶端周壁上;当所述导向块与卡接环槽卡接时,所述插块与插槽插接;所述承托座的上表面设置有操作槽,所述让位弧槽顶壁上贯穿设置有延伸至操作槽的滑移通槽,所述升降杆的上表面设置有插接槽,所述拉板滑移设置在操作槽槽壁上,所述固定杆设置在拉板底端且与滑移通槽相对,所述复位弹簧设置在拉板和操作槽底壁之间。
通过采取上述技术方案,在升降柱插入更换直槽内的同时,升降杆和插块也插入到让位弧槽中,并且此时的固定杆远离插槽,复位弹簧被拉伸;随着承托板的转动,导向块卡在卡接环槽内的同时,插块也插入到插槽中,此时可以实现升降杆和承托座沿竖直方向上的限位;然后停止对拉板施力,复位弹簧的弹性复位力即可促使固定杆插入到插接槽,此时可以实现升降杆和承托座沿周向向上的限位,从而升降杆与承托座连接在一起。
可选的,所述底板座上表面设置有安装槽,所述支撑座底端插接在安装槽内,所述底板座上设置有用于固定支撑座的卡定件。
通过采用上述技术方案,可以实现支撑座与底板座之间的可拆卸连接,从而可以实现称重传感器与底板座之间的可拆卸连接,在称重传感器发生损坏的时候,可以将支撑座拆下,然后对称重传感器进行及时地维修和更换。
可选的,所述卡定件包括卡定块、偏心拉杆、偏心转盘、转动杆、滑移杆和卡定环板,所述安装槽的侧壁上设置有导向滑槽,所述导向滑槽远离安装槽的一端设置有操作腔,所述操作腔的顶壁上贯穿设置有转动槽,所述支撑座的伸入安装槽内的侧壁上设置有与导向滑槽相对的卡定槽,所述卡定块滑移设置在导向滑槽槽壁上,所述偏心转盘转动设置在操作腔中,所述偏心拉杆的一端铰接在卡定块伸入操作腔的一端,所述偏心拉杆远离卡定块的一端铰接在偏心转盘远离圆心的位置,所述转动杆设置在偏心转盘上表面,所述转动杆顶端通过转动槽伸出操作腔,所述滑移杆沿竖直方向滑移设置在转动杆顶端,所述卡定环板设置在滑移杆顶端,所述底板座上设置有卡定环槽,所述卡定环板与卡定环槽螺纹连接。
通过采用上述技术方案,支撑座插入安装槽内后,卡定槽与导向滑槽相对,此时向下转动卡定环板,卡定环板逐渐与卡定环槽螺纹连接的同时,滑移杆在转动杆中沿竖直方向滑移,滑移杆通过转动杆带动偏心转盘转动,同时在导向滑槽的导向作用下,偏心拉杆通过偏心转动带动卡定块插入到卡定槽中,即可将支撑座固定在安装槽中。
综上所述,本申请包括以下至少一种有益技术效果:
1.本申请利用升降组件和转向组件,可以使得承托座与所需量程的称重传感器抵接,不工作的称重传感器则由于与让位槽相对而不受力;从而只要将物品放在承托座的上表面,只有所需量程的称重传感器会感应物品的重量,从而本申请有效提高了对物品的称量准确性;
2.本申请中的承托座与升降柱可拆卸连接,不仅可以根据物品的大小跟换合适的承托座,也可以对损坏的承托座进行及时的维修和更换;
3.本申请的支撑座与底板座可拆卸连接,则可以对损坏的称重传感器进行及时的维修和更换。
附图说明
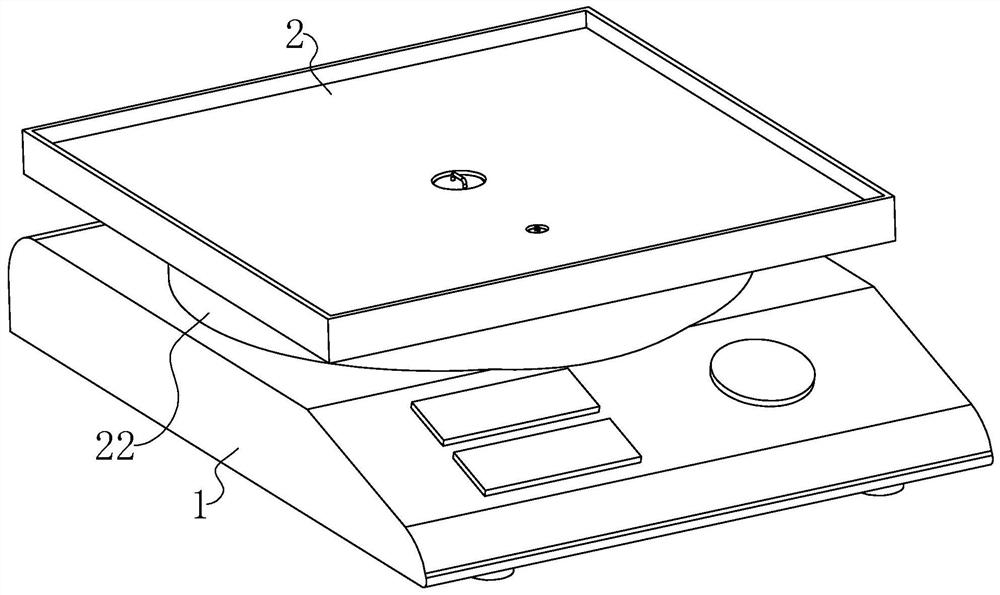
图1是本申请实施例中双量程电子秤的结构示意图。
图2是本申请实施例中双量程电子秤结构的爆炸图。
图3是本申请实施例双量程电子秤中让位槽的结构示意图。
图4是本申请实施例双量程电子秤结构的局部剖视图。
图5是本申请实施例中双量程电子秤中转向组件的结构示意图。
图6是图4中A处的放大图。
图7是图5中B处的放大图。
图8是图4中C处的放大图。
图9是图4中D处的放大图。
图10是图3中E处的放大图。
图11是图4中F处的放大图。
图12是本申请实施例中双量程电子秤中让位弧槽的结构示意图。
图13是图4中G处的放大图。
附图标记说明:1、底板座;11、让位环槽;12、安装槽;121、导向滑槽;122、操作腔;123、转动槽;124、卡定环槽;125、卡定槽;13、卡定件;131、卡定块;132、偏心拉杆;133、偏心转盘;134、转动杆;135、滑移杆;136、卡定环板;2、承托座;21、让位槽;22、封闭环板;23、更换直槽;231、导向槽;232、卡接环槽;24、让位弧槽;241、插槽;242、操作槽;243、滑移通槽;3、称重传感器;4、升降座;41、换向槽;411、转向环槽;412、导向直槽;5、升降柱;51、换向块;52、导向块;521、固定抵槽;53、固定件;531、固定插杆;532、拉动板;533、固定弹簧;54、固定槽;541、固定通槽;55、可拆件;551、插块;552、固定杆;553、拉板;554、复位弹簧;6、支撑座;7、转向组件;71、转向环座;72、驱动环齿;73、驱动齿轮;74、第一电机;8、升降组件;81、升降筒;82、升降杆;821、插接槽;83、升降螺环;84、联动齿轮;85、让位弹簧;86、第二电机。
具体实施方式
以下结合附图1-13对本申请作进一步详细说明。
本申请实施例公开一种双量程电子秤。
如图1和图2所示,一种双量程电子秤,包括底板座1、承托座2和称重传感器3,本申请中的称重传感器3有四个,每两个是同量程的称重传感器3,而且在本实施例中,电子秤有两个显示屏,一个精度是0.1g;另一个精度是1g;本申请还包括升降座4、升降柱5、支撑座6、转向组件7和升降组件8,升降座4安装在底板座1上表面升降座4上表面沿竖直方向开设有换向槽41,升降柱5则穿设在换向槽41内且与换向槽41槽壁滑移连接,升降柱5可以在换向槽41中转动,也可以在换向槽41中沿竖直方向滑移。
如图2所示,支撑座6则与称重传感器3一一对应设置,四个支撑座6安装在底板座1上表面且均匀圆周排列在升降座4周侧,称重传感器3安装在对应支撑座的顶端,而且相同量程的两个称重传感器3位于两个沿周向不相邻的两个支撑座6上。
如图3和图4所示,承托座2则安装在升降柱5的顶端,而且承托座2下表面开设有让位槽21,在电子秤使用过程中,让位槽21与不工作的称重传感器3相对,承托座2的下表面与工作的称重传感器3抵接,升降组件8则设置在底板座1上并用于驱动承托座2升降,转向组件7设置在底板座1上并用于驱动承托座2升降。根据所需要的称重传感器3的量程,启动升降组件8,使得升降组件8将承托座2上抬一端距离,然后启动转向组件7带动承托座2转动,使得让位槽21与不工作的称重传感器3相对,然后启动升降组件8而下移承托座2,使得承托座2的下表面与工作的称重传感器3抵接,此时将物品放在承托座2上,对应的称重传感器3即可对物品进行称重。
如图4所示,在本实施例中,底板座1上表面边缘处凹陷开设有让位环槽11,支撑座6、升降座4均位于让位环槽11内侧,同时,承托座2下表面边缘处设置有封闭环板22,封闭环板22在承托座2转动和升降过程中,始终与让位环槽11插接,从而可以对支撑座6、升降座4的结构形成防护。
如图5和图6所示,本实施例中的转向组件7主要包括转向环座71、驱动环齿72和驱动齿轮73,转向环座71转动设置在底板座1的上表面,支撑座6和升降座4均位于转向环座71的内侧,而且转向环座71与升降柱5的转动中心同心;驱动环齿72一体连接在转向环座71的外环壁上,承托座2的上表面开设有凹槽,凹槽的槽壁上安装有第一电机74,驱动齿轮73通过固定在第一电机74的驱动端而转动设置在底板座1上表面,并且驱动齿轮73与驱动环齿72啮合,升降组件8设置在转向环座71的上表面与承托座2之间。在升降组件8将承托座2上抬至合适高度后,启动第一电机74,驱动齿轮73即可与驱动环齿72啮合,然后转向环座71即可通过升降组件8带动承托座2转动。
如图7和图8所示,升降组件8主要包括升降筒81、升降杆82、升降螺环83、联动齿轮84和让位弹簧85,升降筒81固定安装在转向环座71的上表面,升降杆82沿竖直方向滑移设置在升降筒81内侧壁上,而且升降杆82的上部分为光滑杆,下部分为螺纹凸出的螺纹杆;升降螺环83转动设置在升降筒81的顶端,升降螺环83与升降杆82的螺纹部螺纹连接,转向环座71上表面安装有第二电机86,联动齿轮84固定安装在第二电机86的顶端驱动端,联动齿轮84与升降螺环83的外环壁啮合,让位弹簧85则固定连接在升降杆82底端与升降筒81内底壁之间。
在承托座2工作时,升降螺环83与升降杆82的光滑部相对,此时的升降杆82被让位弹簧85支撑,而且让位弹簧85处于压缩状态,从而在将物品放到承托座2上的时候,由于让位弹簧85的弹性形变而产生位移,只要根据需要计算让位弹簧85的弹力抵消的物品重量,称重传感器3即可正常对物品的重量进行测量;需要上承托座2的时候,由于压缩的让位弹簧85使得升降杆82有向上的移动趋势,因此此时的升降螺环83底端与升降杆82的螺纹部处于抵接的状态,启动第二电机86,使得联动齿轮84带动升降螺环83转动,即可使得升降螺环83与升降杆82螺纹连接,升降杆82利用螺纹进给而带动承托座2上移。
如图9所示,为了提高承托座2的移动稳定性,在本实施例中,换向槽41内周壁顶端设置有转向环槽411,换向槽41内周壁位于转向环槽411下方设置有导向直槽412,导向直槽412顶端与转向环槽411相通,升降柱5底端一体连接有换向块51。在承托座2升降过程中,换向块51在导向直槽412中滑移,直至换向块51移动到转向环槽411中,承托座2可以转动,换向块51也在转向环槽411中滑移,从而承托座2在升降和转向过程中可以得到更加稳定地导向。
如图9和图10所示,为了方便对电子秤进行维修,在本实施例中,承托座2下表面开设有更换直槽23,承托座2下表面位于更换直槽23的周侧还设置有导向槽231,导向槽231与更换直槽23周壁相通,更换直槽23周壁远离槽口的一端开设有卡接环槽232,卡接环槽232也与导向槽231相通;升降柱5与更换直槽23插接,升降柱5的周壁一体连接有导向块52,承托座2上设置有固定导向块52的固定件53,并且为了配合承托座2的拆卸,升降杆82与承托座2也可拆卸连接。在安装承托座2的时候,只要将升降柱5插入更换直槽23中,此时的导向块52会通过导向槽231滑入卡接环槽232中,然后转动承托座2,使得导向块52和承托座2之间发生相对转动,从而导向块52远离导向槽231而与卡接环槽232轴向侧壁抵接,最后利用固定件53对导向块52进行固定,即可实现升降柱5和承托座2的连接。需要分离承托座2和升降柱5的时候,只要解除固定件53的固定作用下,转动承托座2,使得导向块52与导向槽231相对,并且分离升降杆82和承托座2,即可将承托座2取下。
如图9和图10所示,固定件53主要包括固定插杆531、拉动板532和固定弹簧533,承托座2的上表面凹陷开设有固定槽54,固定槽54底壁上贯穿设置有固定通槽541,同时,固定通槽541与卡接环槽232相通且远离导向槽231,导向块52朝向拉动板532的一端凹陷开设有固定抵槽521;拉动板532滑移设置在固定槽54槽壁上,固定插杆531一体连接在拉动板532与固定通槽541相对的侧壁上,固定弹簧533固定连接在拉动板532下表面和固定槽54槽壁之间。在将导向块52滑入卡接环槽232内并与卡接环槽232卡接的时候,拉动拉动板532,使得拉动板532远离升降柱5,此时固定插杆531远离卡接环槽232,固定弹簧533而被拉伸;当导向块52转到卡接环槽232中并与卡接环槽232卡接的时候,固定抵槽521与固定通槽541相对,此时停止对拉动板532施力,固定弹簧533即开始恢复自然状态,固定插杆531即可穿过固定通槽541而插入固定抵槽521中,实现对导向块52的固定。
如图11和图12所示,承托座2和升降杆82之间的可拆卸连接是通过可拆件55实现的,可拆件55设置在承托座2和升降杆82之间,同时,承托座2的下表面设置在让位弧槽24,让位弧槽24的周向端壁上设置有插槽241;可拆件55主要包括插块551、固定杆552、拉板553和复位弹簧554,插块551一体连接在升降杆82顶端周壁上;承托座2的上表面凹陷有操作槽242,让位弧槽24顶壁上贯穿设置有延伸至操作槽242的滑移通槽243,而且升降杆82的上表面设置有插接槽821,拉板553即滑移设置在操作槽242槽壁上,固定杆552一体连接在拉板553底端且与滑移通槽243相对,复位弹簧554固定连接在拉板553和操作槽242底壁之间。向远离升降杆82的方向拉动拉板553,则固定杆552远离插槽241,复位弹簧554被拉伸,在将升降柱5与更换直槽23中的时候,升降杆82和插块551也插入到让位弧槽24中,随着转动承托座2,导向块52滑移到可接环槽中,插块551也与插接槽821插接,滑移通槽243和插接槽821相对,此时停止对拉板553施力,复位弹簧554即恢复自然状态,固定杆552即可穿过滑移通槽243插入插接槽821中,从而升降杆82和承托座2可以连接在一起。
如图13所示,为了方便对称重传感器3进行维修和更换,在本实施例中,底板座1上表面设置有安装槽12,支撑座6底端插接在安装槽12内,底板座1上设置有用于固定支撑座6的卡定件13。而且安装槽12的侧壁上沿水平方向开设有导向滑槽121,导向滑槽121远离安装槽12的一端开设有操作腔122,操作腔122的顶壁上贯穿设置有转动槽123,同时,支撑座6的伸入安装槽12内的侧壁上设置有与导向滑槽121相对的卡定槽125。
如图13所示,卡定件13主要包括卡定块551131、偏心拉杆132、偏心转盘133、转动杆134、滑移杆135和卡定环板136,卡定块551131滑移设置在导向滑槽121槽壁上,转动杆134转动设置在转动槽123槽壁上,偏心转盘133一体连接在转动杆134伸入操作腔122的一端,偏心拉杆132的一端铰接在卡定块551131伸入操作腔122的一端,偏心拉杆132远离卡定块551131的一端铰接在偏心转盘133下表面远离圆心的位置;而且转动杆134顶端通过转动槽123伸出操作腔122,滑移杆135沿竖直方向滑移设置在转动杆134顶端,卡定环板136一体连接在滑移杆135顶端,底板座1上表面位于转动槽123周侧开设有卡定环槽124,卡定环板136与卡定环槽124螺纹连接。在支撑座6插入到安装槽12中后,导向滑槽121与卡定槽125相对,此时转动卡定环板136,卡定环板136与卡定螺纹连接,滑移杆135在转动杆134中向下滑移的同时,滑移杆135通过转动杆134带动偏心转盘133转动,从而偏心拉杆132带动卡定块551131在导向滑槽121中滑移,直至卡定环板136与卡定环槽124螺纹固定好后,卡定块131插入到卡定槽125中,从而对支撑座6进行固定。
本申请实施例一种双量程电子秤的实施原理为:根据所需要的称重传感器3的量程,启动第二电机86,使得联动齿轮84带动升降螺环83转动,即可使得升降螺环83与升降杆82螺纹连接,升降杆82利用螺纹进给而带动承托座2上移,使得升降组件8将承托座2上抬一端距离。
然后,启动第一电机74,驱动齿轮73即可与驱动环齿72啮合,然后换向环座即可通过升降组件8带动承托座2转动,使得让位槽21与不工作的称重传感器3相对。
再反转第二电机86,使得承托座2下移,承托座2的下表面与工作的称重传感器3抵接,此时将物品放在承托座2上,对应的称重传感器3即可对物品进行称重。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 双量程电子秤
- 一种具有连续量程的双阶称重电子秤