一种检测机器人用支撑装置
文献发布时间:2023-06-19 09:55:50
技术领域
本发明属于工业机器人领域,具体是一种检测机器人用支撑装置。
背景技术
工业机器人是用于制造生产的机器人系统,工业机器人的定义是自动化的、可编程的,有三个及以上运动轴的自动化装置;机器人的典型应用包括焊接、绘画、组装、挑选和移动用于印制电路板、包装、打标签、夹板装载、产品检验和测试等工序,所有这些应用都是以高耐用性、高速度和高精度完成的;
传统的工业机器人可进行对产品的检测处理,同时工业机器人在进行组装和使用时需要结合支撑装置,现有的支撑装置大多采用框体式的板材制作而成,完成对整个机械臂的支撑处理;
然而现有的支撑装置功能性单一,仅仅完成对机械臂的支撑处理,在调节机械臂的位置时,需要将用于连接机械臂和支撑装置的螺丝进行拆装处理,在进行维修处理时也极为不便;最后支撑装置在使用后没有得到防护处理,长时间的暴露在外界环境中,容易影响整个机械臂的使用寿命。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种检测机器人用支撑装置。
为实现上述目的,本发明采用了如下技术方案:
一种检测机器人用支撑装置,包括:
底架,其表面焊接有至少两道相互平行的滑轨,并在滑轨上装配带有机械臂的顶板,所述顶板通过在其表面设置滑块与对应的滑轨连接;
活动架,其用于带动机械臂上下移动,且活动架包含相互连接的支撑杆和支撑板,所述支撑板、支撑杆以及顶板之间通过设置连接杆组传动连接;以及
气囊组件,其嵌入式装配到支撑板表面预设的槽体内,且气囊组件包含伸缩囊体和设置到伸缩囊体表面的折叠框,所述气囊组件的内壁空间可对整个机械臂覆盖。
优选的,所述滑轨的数量有两组,且滑轨的外壁两侧均开设有凹槽,所述滑块内壁两侧开设的凸块可滑动式装配到凹槽内。
优选的,所述滑块的上表面开设有齿槽,所述顶板的一侧安装有微型电机,且微型电机输出轴连接的齿轮可与齿槽进行齿合式连接。
优选的,所述活动架的表面开设有内槽体,且内槽体可用于收装活动架。
优选的,所述内槽体内壁的两侧开设有呈上下分布的条形槽和齿形槽,且齿形槽的截面呈齿形,所述支撑杆的一端可插装到对应的齿形槽内,且支撑杆一侧焊接的滑杆贯穿条形槽。
优选的,所述连接杆组由三组杆体组成,其中的两组杆体分别用于支撑杆和支撑板以及支撑杆和顶板,另一组杆体用于连接剩余的两组杆体。
优选的,用于连接所述支撑杆和支撑板的杆体表面安装有气泵,且气泵与伸缩囊体之间通过软管连接,并在该软管的中部安装气阀。
优选的,所述折叠框的中部设置有转轴,且折叠框的下表面与伸缩囊体的上表面粘合,所述折叠框的上表面设置有磁片。
与现有技术相比,本发明提供了一种检测机器人用支撑装置,具有如下有益效果:
一是将滑块与滑轨结合使用,可灵活改变整个顶板在底架上方的位置,通过齿轮与齿槽进行齿合传动的方式,带动整个机械臂进行线性活动,同时使用的活动架可在纵向上改变机械臂的位置,从而提高了整个装置的使用灵活性;
二是将可进行收装的活动架与顶板结合使用,通过预先的手动调节即可改变支撑杆在内槽体中的位置,从而实现对支撑板高度的调节处理,同时在支撑板的重力作用下可确保整个活动架位置的稳固,解决了传统机械臂安装位置固定,不便调节的问题;
三是在支撑板的上方设计气囊组件,可在完全展开的状态下,对整个机械臂进行覆盖,从而实现防护作业,避免外界环境对其造成损坏,在一定程度上可提高整个机械臂的使用寿命。
附图说明
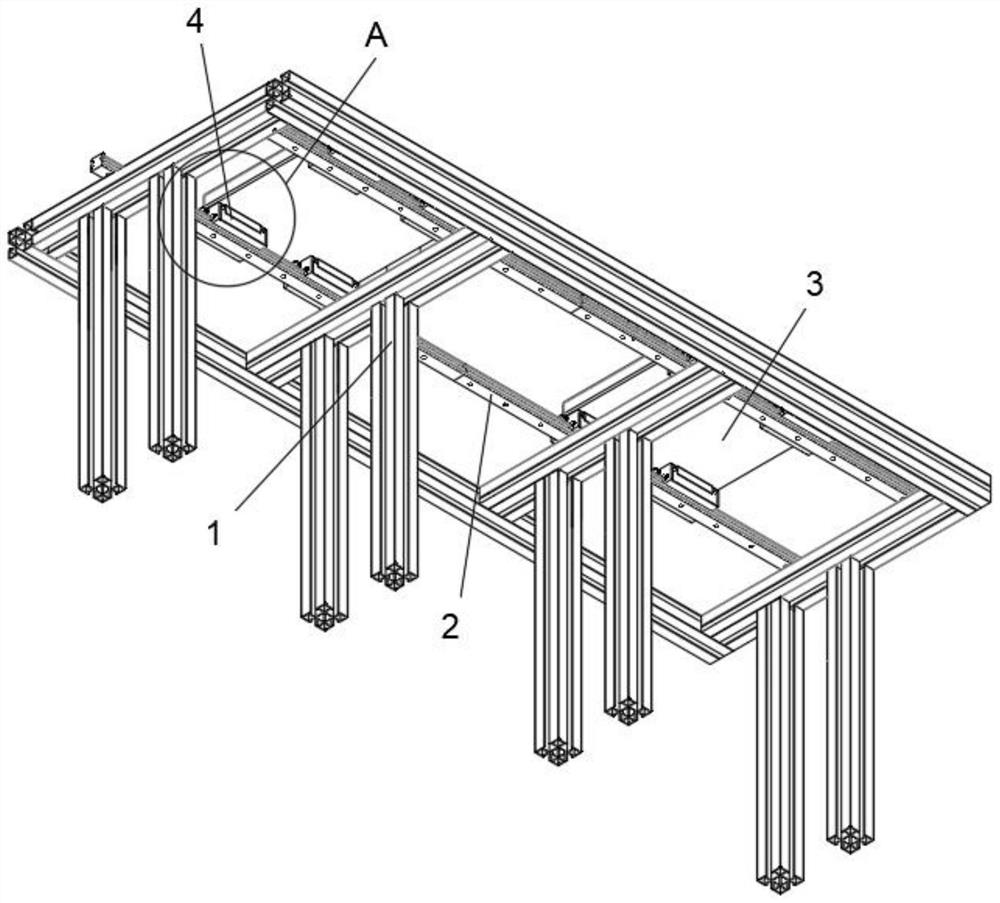
图1是本发明的整体结构示意图;
图2是本发明的图1局部结构A的放大图;
图3是本发明中底架与顶板连接端的局部结构示意图;
图4是本发明的活动架结构示意图;
图5是本发明的图4局部结构B的放大图;
图6是本发明中气囊组件结构截面示意图;
图7是本发明中气囊组件在展开状态下的示意图。
附图标记:1、底架;2、滑轨;3、顶板;4、滑块;41、齿槽;5、微型电机;6、齿轮;7、活动架;71、支撑杆;72、支撑板;8、连接杆组;9、气泵;10、气囊组件;101、折叠框;102、伸缩囊体;11、内槽体;12、机械臂;13、齿形槽;14、条形槽;15、滑杆。
具体实施方式
以下结合附图1,进一步说明本发明一种检测机器人用支撑装置的具体实施方式。本发明一种检测机器人用支撑装置不限于以下实施例的描述。
本实施例给出一种检测机器人用支撑装置的具体结构,如图1-7所示,一种检测机器人用支撑装置,包括:
底架1,其表面焊接有至少两道相互平行的滑轨2,并在滑轨2上装配带有机械臂12的顶板3,顶板3通过在其表面设置滑块4与对应的滑轨2连接;
活动架7,其用于带动机械臂12上下移动,且活动架7包含相互连接的支撑杆71和支撑板72,支撑板72、支撑杆71以及顶板3之间通过设置连接杆组8传动连接;以及
气囊组件10,其嵌入式装配到支撑板72表面预设的槽体内,且气囊组件10包含伸缩囊体102和设置到伸缩囊体102表面的折叠框101,气囊组件10的内壁空间可对整个机械臂12覆盖。
如图1-3所示,滑轨2的数量有两组,且滑轨2的外壁两侧均开设有凹槽,滑块4内壁两侧开设的凸块可滑动式装配到凹槽内;
该处滑轨2的作用为:
对滑块4的运动方向进行限定,同时滑块4两侧设计的凸块可确保滑块4与滑轨2连接和运动状态下的稳定性能。
如图3所示,滑块4的上表面开设有齿槽41,顶板3的一侧安装有微型电机5,且微型电机5输出轴连接的齿轮6可与齿槽41进行齿合式连接;
具体的,还可在底架1上安装蓄电池或是接通电源,使其为各个微型电机5进行供电,保证微型电机5进行顺利工作,微型电机5可带动齿轮6进行转动,使得齿轮6在齿槽41的表面转动,从而带动整个顶板3在底架1上方进行线性移动,可连接外置的PLC226型号的控制器来控制微型电机5的开关或转动速率;
上述将滑块4与滑轨2结合使用,可灵活改变整个顶板3在底架1上方的位置,通过齿轮6与齿槽41进行齿合传动的方式,带动整个机械臂12进行线性活动,同时使用的活动架7可在纵向上改变机械臂12的位置,从而提高了整个装置的使用灵活性。
如图4所示,活动架7的表面开设有内槽体11,且内槽体11可用于收装活动架7;该处的内槽体11可对折叠后的活动架7进行收装处理;
如图4和5所示,内槽体11内壁的两侧开设有呈上下分布的条形槽14和齿形槽13,且齿形槽13的截面呈齿形,支撑杆71的一端可插装到对应的齿形槽13内,且支撑杆71一侧焊接的滑杆15贯穿条形槽14。
如图4所示,连接杆组8由三组杆体组成,其中的两组杆体分别用于支撑杆71和支撑板72以及支撑杆71和顶板3,另一组杆体用于连接剩余的两组杆体。
上述将可进行收装的活动架7与顶板3结合使用,通过预先的手动调节即可改变支撑杆71在内槽体11中的位置,从而实现对支撑板71高度的调节处理,同时在支撑板71的重力作用下可确保整个活动架7位置的稳固,解决了传统机械臂12安装位置固定,不便调节的问题。
如图4所示,用于连接支撑杆71和支撑板72的杆体表面安装有气泵9,且气泵9与伸缩囊体102之间通过软管连接,并在该软管的中部安装气阀;
具体的,在使用到伸缩囊体101时,可开启气阀,使得气泵9对伸缩囊体101的内部进行充气,从而使其从支撑板72上方的槽体内伸出,持续提高整个伸缩囊体101的高度,继而完成对整个机械臂12的包裹处理。
如图6和7所示,折叠框101的中部设置有转轴,且折叠框101的下表面与伸缩囊体102的上表面粘合,折叠框101的上表面设置有磁片;在使用折叠框101时,可将折叠框101的两侧向上翻转,而后使得两侧折叠框101上方的磁片进行磁吸连接,从而完成对伸缩囊体102上方开口端的封闭处理;
上述在支撑板72的上方设计气囊组件10,可在完全展开的状态下,对整个机械臂12进行覆盖,从而实现防护作业,避免外界环境对其造成损坏,在一定程度上可提高整个机械臂12的使用寿命。
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
- 一种检测机器人用支撑装置
- 一种管道检测机器人底盘及管道检测机器人