一种手自一体释放与自锁电磁制动系统
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及动力设备辅助制动领域,尤其涉及一种手自一体释放与自锁电磁制动系统。
背景技术
电磁制动是应用于起重升降动力设备、新能源汽车的动力驱动设备等带动力驱动的设备中,比如在新能源汽车上驱动电机的制动,又比如起重升降电梯上驱动电机的制动。电磁制动是驱动动力设备上的核心部件,是动力设备中重要的安全部件,现有电磁制动是采用电磁铁驱动铁块运动并实现即时制动作用,其无法实现制动或制动释放自锁保持,一旦电磁铁失电铁块就恢复原始状态而无法持续制动;并且现有制动是无法实现手动接入进行制动、制动释放、自锁等操作,也无法实现制动与自锁工作状态的远程监控。
发明内容
本发明的目的在于克服现有电磁制动无法持续制动及持续自锁,也不能实现手自一体制动、自锁控制等缺陷,提供一种手自一体释放与自锁电磁制动系统,可以实现手动及自动两种方式实现制动、制动释放与自锁操控电磁制动系统,既满足了自动化操控、远程操控、远程监测的功能需要,又能进行手动介入进行对应操控,具有结构巧妙、设计合理、多用途操控、功能丰富实用、安全可靠等优点。
本发明的目的通过下述技术方案实现:
一种手自一体释放与自锁电磁制动系统,包括安装底板,安装底板底部安装有制动座,所述制动座底部转动安装有转子,所述转子具有转子盘,转子盘上固定有摩擦片,转子盘与制动座下端面之间设有与摩擦片相对应的制动衔铁,制动座内部安装有与制动衔铁连接的压缩弹簧,制动座内部还安装有与制动衔铁相对应的制动电磁铁;所述安装底板贯穿安装有可升降运动的释放杆,释放杆下端通过升降同步架与制动衔铁连接,释放杆上端连接有S形释放板,S形释放板底端为释放部,S形释放板顶端为驱动部,S形释放板的释放部通过锁紧螺母固定于释放杆上端,S形释放板的驱动部连接有手柄杆;所述安装底板顶部对应驱动部设有自锁电磁铁和自锁板安装座,所述自锁板安装座通过复位扭簧转动安装有与驱动部相对应顶持的自锁支撑铁板,所述自锁电磁铁与自锁支撑铁板相对应。
为了更好地实现本发明,所述安装底板顶部安装有上壳体,上壳体上左右移动安装有带弹簧的顶杆,顶杆位于上壳体内部的一端与自锁支撑铁板相对应。
根据本发明的一个实施例,所述自锁电磁铁顶部与S形释放板靠近驱动部的顶端之间连接设有复位弹簧。
根据本发明的一个实施例,所述制动座底部中心设有转动轴套,所述转子通过花键与转动轴套连接固定。
根据本发明的一个实施例,所述S形释放板的释放部与锁紧螺母之间安装有垫圈组件。
根据本发明的一个实施例,所述垫圈组件包括上下重叠组合配合设置的球面垫圈与锥面垫圈。
根据本发明的一个实施例,所述上壳体上活动安装有用于装配手柄杆的柄杆安装套。
根据本发明的一个实施例,所述自锁电磁铁边缘设有与自锁支撑铁板相对应的微动监测器A。
根据本发明的一个实施例,所述制动电磁铁或制动座上设有与制动衔铁相对应的微动监测器B。
为了实现本发明的自动控制,本发明还包括制动自锁控制系统和监测系统,所述制动自锁控制系统包括制动控制器和自锁控制器,所述制动控制器与制动电磁铁电连接,所述自锁控制器与自锁电磁铁电连接;所述监测系统包括制动监测模块和自锁监测模块,所述制动监测模块与微动监测器B电连接,自锁监测模块与微动监测器A电连接。
为了实现本发明的远程控制、远程监控,本发明还包括远程控制系统,所述制动自锁控制系统、监测系统分别与远程控制系统通信连接。
本发明较现有技术相比,具有以下优点及有益效果:
(1)本发明通过一套结构可以实现手动及自动两种方式实现制动、制动释放与自锁操控电磁制动系统,既满足了自动化操控、远程操控、远程监测的功能需要,又能进行手动介入进行对应操控,具有结构巧妙、设计合理、多用途操控、功能丰富实用、安全可靠等优点。
(2)本发明采用多个弹簧加压实现控制复位,除能够自动控制制动电磁铁、自锁电磁铁的工作以实现制动、制动释放与自锁等操控作业,同时在结构上保留了手动介入的操作结构,创新性地提出了一种全新的、集合自动、手动操控的新颖结构,并能实现工作状态的监测,便于灵活便捷操控,可搭载于新能源汽车的动力驱动设备、起重升降动力设备等动力设备并实现制动作业。
(3)本发明的监测系统可以实现电磁制动系统的制动监测、制动释放自锁监测,并得出电磁制动系统的综合工作状态,然后将综合工作状态数据远程传输至远程控制系统,便于进行远程显示、远程监测以及远程控制。
附图说明
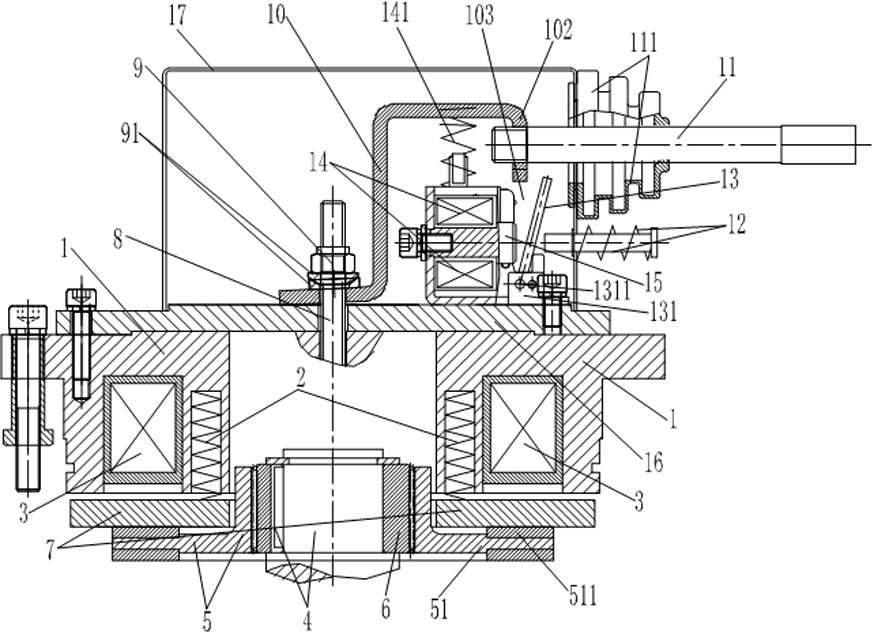
图1为本实施例手自一体释放与自锁电磁制动系统在制动时的结构示意图;
图2为本实施例手自一体释放与自锁电磁制动系统在释放制动且自锁保持时的结构示意图;
图3为图1俯视方向的结构示意图。
其中,附图中的附图标记所对应的名称为:
1-制动座,2-压缩弹簧,3-制动电磁铁,4-转动轴套,5-转子,51-转子盘,511-摩擦片,6-花键,7-制动衔铁,8-释放杆,9-锁紧螺母,91-垫圈组件,10- S形释放板,101-释放部,102-驱动部,103-自锁顶持空间,11-手柄杆,111-柄杆安装套,12-顶杆,13-自锁支撑铁板,131-自锁板安装座,1311-复位扭簧,14-自锁电磁铁,141-复位弹簧,15-微动监测器A,16-安装底板,17-上壳体。
具体实施方式
下面结合实施例对本发明作进一步地详细说明。
实施例
如图1~图3所示,一种手自一体释放与自锁电磁制动系统,包括安装底板16,安装底板16底部安装有制动座1,制动座1用于安装、装配制动部件,制动座1底部转动安装有转子5,本实施例的制动座1底部中心设有转动轴套4,转子5通过花键6与转动轴套4连接固定。安装时,驱动动力设备(本实施例以电机为例)的驱动轴装配于转动轴套4上,驱动动力设备驱动转动轴套4、转子5同步在制动座1底部转动,本实施例电磁制动系统的制动电磁铁3驱动制动衔铁7靠近或远离转子5运动,当驱动制动衔铁7靠近并紧密贴合转子5的转子盘51时,则制动衔铁7就能依靠摩擦力实现对转子5的制动目的;当驱动制动衔铁7脱离或远离转子5的转子盘51时,则制动衔铁7也就释放对转子5的制动,即制动就释放或解除。
如图1所示,本发明转子5具有转子盘51,转子盘51上固定有摩擦片511,转子盘51与制动座1下端面之间设有与摩擦片511相对应的制动衔铁7,通过制动衔铁7与摩擦片511相互贴合并摩擦制动,若制动衔铁7与摩擦片511相互具有一定距离或脱离,则摩擦制动随即解除。
制动座1内部安装有与制动衔铁7连接的压缩弹簧2,制动座1内部还安装有与制动衔铁7相对应的制动电磁铁3。本发明压缩弹簧2在正常工作下是受压状态,如图1所示,制动座1上的制动衔铁7在压缩弹簧2的强弹力作用下紧贴转子盘51上的摩擦片511,并在常态下(制动电磁铁3不带电或失电状态下)依靠摩擦力进行制动。当制动电磁铁3带电工作时,制动电磁铁3就会驱动制动衔铁7脱离或远离转子5的转子盘51时,则制动衔铁7也就释放对转子5的制动,即制动就释放或解除。
如图1所示,本实施例安装底板16贯穿安装有可升降运动的释放杆8,释放杆8可在安装底板16上升降运动,安装底板16上贯穿开有释放杆孔,释放杆8升降运动安装于释放杆孔中,释放杆8下端通过升降同步架与制动衔铁7连接,释放杆8上端连接有S形释放板10,S形释放板10底端为释放部101,S形释放板10顶端为驱动部102,S形释放板10的释放部101通过锁紧螺母9固定于释放杆8上端,S形释放板10的释放部101位于安装底板16顶部并通过锁紧螺母9锁定,由于释放杆8下端通过升降同步架与制动衔铁7连接,制动衔铁7正常受压缩弹簧2的弹力驱动,这样释放杆8就处于稳定状态(不会误发生升降运动)。
如图1、图2所示,S形释放板10的驱动部102连接有手柄杆11,安装底板16顶部对应驱动部102设有自锁电磁铁14和自锁板安装座131,自锁板安装座131通过复位扭簧1311转动安装有与驱动部102相对应顶持的自锁支撑铁板13,自锁支撑铁板13可在复位扭簧1311的弹力作用下进行复位运动,自锁电磁铁14与自锁支撑铁板13相对应,图1所示,自锁电磁铁14与自锁支撑铁板13呈左右位置对应设置。
为了方便顶杆12、释放杆8的安装,本实施例安装底板16顶部安装有上壳体17,上壳体17上左右移动安装有带弹簧的顶杆12,顶杆12位于上壳体17内部的一端与自锁支撑铁板13相对应。上壳体17上活动安装有用于装配手柄杆11的柄杆安装套111,如图1、图2所示,手柄杆11装配于柄杆安装套111上,柄杆安装套111活动安装于上壳体17上,手柄杆11上下拉动时,柄杆安装套111也会自适应配合上下运动,以方便其手动制动或制动释放操作。
如图1所示,自锁电磁铁14顶部与S形释放板10靠近驱动部102的顶端之间连接设有复位弹簧141,如图2、图3所示,当手柄杆11向上拉动时,制动进行释放操作,复位弹簧141会受拉,复位弹簧141会具有恢复弹力,在手柄杆11上的人力解除时,复位弹簧141的恢复弹力会驱动S形释放板10的驱动部102复位。
如图1所示,本实施例S形释放板10的释放部101与锁紧螺母9之间安装有垫圈组件91。优选地,垫圈组件91包括上下重叠组合配合设置的球面垫圈与锥面垫圈,垫圈组件91可以应对S形释放板10的释放部101对应运动,让S形释放板10的释放部101更好地升降驱动释放杆8,即垫圈组件91可以帮助释放部101实现对释放杆8的升降同步带动。
为了便于对是否自锁状态进行监测,本实施例在自锁电磁铁14边缘设有与自锁支撑铁板13相对应的微动监测器A15,当然微动监测器A15也可以设置于靠近自锁支撑铁板13的其他位置,微动监测器A15也可以采用用于监测自锁支撑铁板13位置状态的光电传感器,自锁支撑铁板13工作应用状态有两种,第一种为未自锁状态,即自锁支撑铁板13在复位扭簧1311作用下倒向顶杆12端部一侧,第二种为自锁状态,即自锁支撑铁板13在顶杆12顶持作用下克服复位扭簧1311倒向自锁电磁铁14一侧,并且自锁支撑铁板13顶持于S形释放板10的驱动部102下方,由于S形释放板10的驱动部102受复位弹簧141弹力作用就会将自锁支撑铁板13压住并定位在S形释放板10的驱动部102下方。微动监测器A15可以监测到自锁支撑铁板13是否处于自锁状态,若自锁支撑铁板13处于自锁状态,则微动监测器A15监测得到已释放自锁状态。
为了便于对是否制动状态进行监测,本实施例制动电磁铁3或制动座1上设有与制动衔铁7相对应的微动监测器B,当然微动监测器B也可以设置于靠近制动衔铁7的其他位置,微动监测器B也可以采用用于监测制动衔铁7位置状态的光电传感器,制动衔铁7工作应用状态有两种,第一种为制动状态,即制动电磁铁3不带电,制动衔铁7在压缩弹簧2的强弹力作用下紧贴转子盘51上的摩擦片511,并实现依靠摩擦力制动转子盘51及转子5;第二种为制动释放状态(也即制动解除状态),此时制动电磁铁3通电工作,制动电磁铁3吸引制动衔铁7脱离转子盘51的接触,并实现制动解除的目的。微动监测器B可以通过制动衔铁7的位置状况监测制动衔铁7是制动状态还是制动释放状态,然后向外传输上述两种状态的监测数据。
本发明还包括制动自锁控制系统和监测系统,制动自锁控制系统包括制动控制器和自锁控制器,制动控制器与制动电磁铁3电连接,自锁控制器与自锁电磁铁14电连接。监测系统包括制动监测模块和自锁监测模块,制动监测模块与微动监测器B电连接,自锁监测模块与微动监测器A15电连接。本发明还包括远程控制系统,制动自锁控制系统、监测系统分别与远程控制系统通信连接。
制动自动控制原理如下:制动自锁控制系统向制动控制器发出制动指令,制动控制器对自锁电磁铁14进行断电作业,制动衔铁7在压缩弹簧2的强弹力作用下靠近并紧密贴合转子5的摩擦片511,制动衔铁7就能依靠摩擦力实现对转子5的制动,转子5就无法进行转动或实现转子5的转速制动目的。
制动释放自动控制原理如下:制动自锁控制系统向制动控制器发出制动指令,制动控制器对自锁电磁铁14进行通电作业,自锁电磁铁14通电并驱动制动衔铁7脱离或远离转子5的转子盘51运动,此时制动衔铁7就与转子盘51上的摩擦片511脱离制动摩擦接触,转子5就解除制动并能在驱动动力设备作用下进行转动。
制动释放手动控制原理如下:制动衔铁7在压缩弹簧2的强弹力作用下靠近并紧密贴合转子5的摩擦片511并处于制动状态,如图2、图3所示,人手外力通过手柄杆11向上拉动手柄杆11,手柄杆11带动S形释放板10的驱动部102运动进而带动S形释放板10向上运动,S形释放板10的释放部101就同步带动释放杆8上升运动,释放杆8通过升降同步架带动制动衔铁7上升运动,制动衔铁7克服压缩弹簧2向上运动并脱离制动摩擦接触,转子5就解除制动并能在驱动动力设备作用下进行转动。当人手外力消失,复位弹簧141在强弹力作用下拉动S形释放板10的驱动部102向下运动进而带动S形释放板10向下运动,S形释放板10的释放部101就同步带动释放杆8下降运动,这样制动衔铁7就会在压缩弹簧2的强弹力作用下靠近并紧密贴合转子5的摩擦片511并恢复处于制动状态。
制动释放自锁自动控制原理如下:在电磁制动系统处于制动释放状态时,制动自锁控制系统向自锁控制器发出自锁控制指令,自锁控制器对自锁电磁铁14进行通电作业,自锁电磁铁14吸引自锁支撑铁板13朝向自锁顶持空间103(自锁顶持空间103为驱动部102下方的顶持空间)方向运动,由于处于制动释放状态,则S形释放板10上升到制动释放高度位置处,自锁顶持空间103的位置就能完全容纳自锁支撑铁板13进入到自锁顶持空间103中,当自锁支撑铁板13完全进入到自锁顶持空间103中,此时自锁支撑铁板13已经被自锁电磁铁14完全吸入到位,自锁支撑铁板13就会顶持住驱动部102并让S形释放板10保持住制动释放状态以实现制动释放的锁定,此时微动监测器A15就会监测到自锁支撑铁板13的位置状态并向自锁监测模块发出已自锁反馈信号,处于近端或远端的监测系统就能得到已自锁反馈信号,远程控制系统也能得到已自锁反馈信号,便于进行及时工作状态的监测和显示,此时可以控制自锁电磁铁14断电;若微动监测器A15监测到自锁支撑铁板13未到自锁状态,微动监测器A15也会反馈未自锁信号给监测系统和远程控制系统。制动释放手动控制操作为:推动顶杆12并克服自身弹簧弹力顶持自锁支撑铁板13到位进入到自锁顶持空间103中,然后自锁支撑铁板13就会受压顶持驱动部102并实现手动自锁,同时微动监测器A15也能监测并反馈给监测系统和远程控制系统。
无论是手动还是自动进行制动或制动释放控制,微动监测器B都会对制动衔铁7的位置状态进行监测并向制动监测模块发出已制动状态或制动释放状态,制动监测模块会及时反馈给监测系统和远程控制系统,便于远程监测电磁制动系统的制动状态。本发明的监测系统可以实现电磁制动系统的制动监测(包括已制动状态与制动释放状态)、制动释放自锁监测(包括已自锁状态与未自锁状态),并得出电磁制动系统的综合工作状态,然后将综合工作状态数据远程传输至远程控制系统,便于进行远程显示、远程监测以及远程控制。
制动自锁控制系统包括制动控制器和自锁控制器,制动控制器与制动电磁铁3电连接,自锁控制器与自锁电磁铁14电连接。监测系统包括制动监测模块和自锁监测模块,制动监测模块与微动监测器B电连接,自锁监测模块与微动监测器A15电连接。本发明还包括远程控制系统,制动自锁控制系统、监测系统分别与远程控制系统通信连接。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种手自一体释放与自锁电磁制动系统
- 一种带有可自锁手动释放机构的电磁安全制动器