一种直线位移测量装置及方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于光电位移精密测量技术领域,具体涉及一种具有抗污渍能力的直线位移测量装置及测量方法。
背景技术
数字化位移测量是集光机电于一体化的高精密测量技术,以其高精度、高分辨力、测量范围广、易于与数字化设备对接等优点已成为工业制造、航空航天、军事装备等领域的关键技术。随着生产制造业的日趋发展,对数字化位移测量技术提出了更高的要求,主要包括:高分辨能力、高测量精度。因此,研究高分辨力、高精度位移测量技术,是基础制造研究领域的热门,具有重要的研究价值。
在光电位移测量时,当标尺光栅污渍覆盖时,将严重影响测量性能,甚至出现错误。对于抗污渍性能,目前的主流做法是增加测量装置的密封性能,但是受滑动导轨的影响,很难做到完全密封。此外,为减少污渍的影响,提高抗污渍能力的研究主要包括两种方法。一种方法是采用“磁感应”式位移测量技术,如:基于磁栅的位移测量方法。另一种方法是采用钢带尺替代玻璃光栅,如:英国雷尼绍公司生产的RESOLUTE系列绝对式光栅尺,采用钢带尺结合内置的冗余码技术,使其具有较强的抗污能力,可以受轻微污染时正确读取数据,分辨力位1nm。英国雷尼绍公司的RESOLUTE系列绝对式光栅尺,采用钢带尺具有一定的抗污渍性能,并且实现了较高的测量分辨力。但是由于雷尼绍公司的技术垄断,国内设备若要实现较高的测量性能,需依赖进口。
发明内容
为了研制具有抗污渍性能的直线位移测量设备,本发明公开了一种具有抗污渍能力的直线位移测量装置,采用金属光栅并配合双图像传感器,可以较强的抗污渍性能。为实现上述目的,本发明采用以下具体技术方案:
一种直线位移测量装置,包括:读数头、平行光源、滑动导轨、位于读数头和平行光源之间的标尺光栅;
标尺光栅固定在滑动导轨上,与滑动导轨延伸方向平行,标尺光栅的漏空标线面与滑动导轨垂直;
读数头与平行光源可滑动的安装在滑动导轨上,形成对射关系;
平行光源照射区域均分为两部分,分别由读数头的两个图像传感器对漏空标线进行成像;
通过利用读数头识别到的标尺光栅上的N条漏空标线的像,得到编码值A、位移细分值B以及位移细分值B的偏移量Δx
优选地,标尺光栅包含长度量程为L的尺身和M条按照伪随机序列的编码方式刻划在尺身上的漏空标线;漏空标线沿标尺光栅的量程方向排列,且漏空标线为透光的矩形标线,质心间距相同。
优选地,漏空标线包含宽标线和窄标线,分别代表编码元“1”和“0”;宽标线的宽度不大于L/M,窄标线的宽度不大于L/2M。
优选地,N为漏空标线数量M的二进制位数,N为预设值。
优选地,读数头包含:第一图像传感器、第二图像传感器和处理电路;第一图像传感器和第二图像传感器分别与处理电路连接,均位于处理电路的下侧面;
第一图像传感器和第二图像传感器的视野范围均大于N·L/M。
处理电路用于接收图像传感器的图像数据,跟据图像数据判断漏空标线是否存在污渍、进行细分运算和译码运算。
优选地,平行光源包括:第一平行光源和第二平行光源;第一平行光源和第二平行光源发出的光线分别透过各自上方的N条漏空标线,并将漏空标线的图案分别映射到第一图像传感器上和第二图像传感器上,形成投影成像。
优选地,还包括与读数头连接,将计算处理得到的直线位移测量值X进行输出的传输电缆。
一种直线位移测量方法,包括:
S1、通过质心算法对上述直线位移测量装置获得的漏空标线进行质心计算,同时计算并判断相邻两条漏空标线之间的间距和宽度是否改变,以此判断标尺光栅是否存在污渍;
S2、根据出现污渍的图像传感器中未被污染的漏空标线位置,与另一图像传感器中对应的漏空标线位置作差,计算出两个图像传感器之间的偏移量ΔD;
S3、计算未被污染的标尺光栅的直线位移测量值D并与偏移量ΔD做差即获得污染区域的直线位移测量值X。
优选地,偏移量ΔD包括位移细分值的偏移量Δx
其中,
an为以污染区域所在的图像传感器的中心点为零点建立的坐标系中,视野内任意一个没被干扰的标线像素位置;
x
bn为与an对应的在另一没被污染图像传感器的中心点为零点建立的坐标系中的标线像素位置;
x
x
优选地,直线位移测量值D的获取包括以下步骤:
S301、通过识别N个漏空标线图案中的宽标线与窄标线,得到当前识别区域的编码数值,经过译码得到区域的译码值A;
S302、通过计算区域中间两条相邻漏空标线的相对位移,得到位移细分值B;
S303、通过由下式获得直线位移测量值D:
D=A×K+B (2)
其中,K=2
本发明能够取得以下技术效果:
1、采用金属光栅并配合双图像传感器,具有较强的抗污渍性能。
2、该方法具有鲁棒性能,能够保证输出的连续,不错码。
附图说明
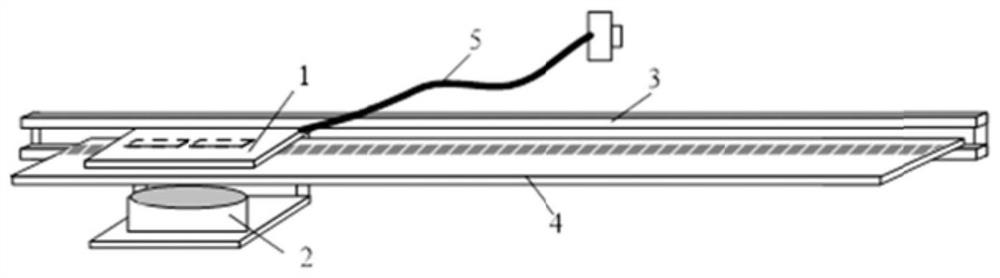
图1是本发明一个实施例的一种直线位移测量装置原理图;
图2是本发明一个实施例的漏空标线示意图;
图3是本发明一个实施例的读数头示意图;
图4是本发明一个实施例的细分原理示意图;
图5是本发明一个实施例的抗污渍原理图;
图6是本发明一个实施例的另一种平行光源示意图;
图7是本发明一个实施例的测量方法流程图。
附图标记:
读数头1、第一图像传感器11、第二图像传感器12、处理电路13、平行光源2、第一平行光源21、第二平行光源22、
滑动导轨3、
标尺光栅4、尺身41、漏空标线42、
传输电缆5。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
本发明的目的是提供一种直线位移测量装置及方法,以提升直线位移测量的抗污渍能力。下面将对本发明提供的一种直线位移测量装置及方法,通过具体实施例来进行详细说明。
如图1所示,本发明装置包括读数头1、平行光源2、滑动导轨3和标尺光栅4;其中,读数头1与平行光源2可滑动安装在滑动导轨3上,两者为对射关系;标尺光栅4固定在滑动导轨3上,与滑动导轨3延伸方向平行,标尺光栅4的漏空标线面与滑动导轨3垂直;
平行光源2照射区域均分为两部分,分别由读数头1包括的第一图像传感器11和第二图像传感器12进行成像;
标尺光栅4位于读数头1和平行光源2之间;通过利用读数头1识别到的当前成像区域内标尺光栅4上的N条漏空标线42,得到对应的编码值A、位移细分值B以及位移细分值B的偏移量Δx
在本发明的一个优选实施例中,标尺光栅4包括尺身41和漏空标线42两部分,参见图2,沿长度量程为L的尺身41上刻画M条按照伪随机序列的编码方式排列的漏空标线42,M条漏空标线42为透光的矩形标线,质心间距相同。
其中,宽标线代表编码元“1”,窄标线代表编码元“0”且宽标线的宽度不大于L/M,窄标线的宽度不大于L/2M;
如图3示出的读数头1,包括第一图像传感器11、第二图像传感器12和处理电路13;第一图像传感器11和第二图像传感器12分别与处理电路13连接,均位于处理电路13的下侧面,正对平行光源2;
第一图像传感器11和第二图像传感器12的视野范围均大于N·L/M;
处理电路13用于接收第一图像传感器11和第二图像传感器12的图像数据,根据获得的图像数据判断漏空标线42是否存在污渍,进行细分运算和译码运算。
在本发明的一个优选实例中,测量装置还包括与读数头1连接,将计算处理得到的直线位移测量值X进行输出的传输电缆5。
在本发明的另一个优选实例中,可以采用一个平行光源2或者两个平行光源2;如图6所示,采用两个平行光源2时,使第一平行光源21和第二平行光源22分别与第一图像传感器11和第二图像传感器12形成对射关系。即使第一平行光源21和第二平行光源22发出的光线分别透过各自上方的N条漏空标线42,并将漏空标线42的图案分别映射到第一图像传感器11上和第二图像传感器12上,形成投影成像。
图7示出了利用本发明的一种直线位移测量装置在标尺光栅上有污渍情况时进行直线位移测量的测量方法,通过识别另一未被污染区域所对应的图像传感器的图像计算得到的直线位移测量值D与偏移量ΔD作差,获得污染区域的直线位移测量值X
首先,利用处理电路13对第一图像传感器11和第二图像传感器12采集到的图像进行特征识别,判断标尺光栅4上是否存在污渍。
在本发明的一个优选实施例中,根据设定,漏空标线42的间距、宽度信息是已知的。因此,采用质心算法对采集到的每个图像中的N条漏空标线42中相邻的漏空标线42之间的距离和宽度进行质心计算。当间距、宽度数据发生变化则判定此条漏空标线42存在污渍。
其次,进行抗污渍计算,如图5所示,假设污渍存在于第一图像传感器11对应的标尺光栅4区域内;
在本发明的一个优选实施例中,处理电路13通过识别第二图像传感器12上N个漏空标线42的图案中的宽标线与窄标线,得到当前识别区域的编码值,经过译码得到当前区域的译码值A;
以第二图像传感器12的中心点为零点建立坐标系,坐标系x轴为第二图像传感器12的像素位置,y轴为灰度值。x
式中,η是量化值,η的数值越大所能实现的细分倍数越大;
以图4中第一图像传感器11视野内任意一个没被干扰的漏空标线42为基准,如:a
在第二图像传感器12中,与a
式(1)为第一图像传感器11和第二图像传感器12之间细分值的偏移量;
当第一图像传感器11的视野内出现污渍,采用第二图像传感器12进行计算,将偏移量Δx
在本发明的另一个实施例中,由于译码值的分辨力较低,所以预设第一图像传感器11和第二图像传感器12之间译码的差值为ΔA,当检测到第一图像传感器11存在污渍时,将第二图像传感器12的译码值减去ΔA,可以实现对第一图像传感器11的译码值A′的获取,
A′=A-ΔA (5)
最后,利用式(4)与式(5)获得污染区域直线位移测量值X:
X=A′×K+B′ (2)
其中,K=2
该方法具有鲁棒性能,能够保证输出的连续,不错码。
若在第二图像传感器12视野内出现污渍时,采用第一图像传感器11进行计算数值,方法相同,不再赘述。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
- 小幅直线运动的位移测量方法及其位移测量装置
- 一种直线位移测量装置和方法