一种全地形采摘机器人
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及采摘机器人技术领域,尤其涉及一种全地形采摘机器人。
背景技术
农业自动化是农业工程领域十分重要的方向,随着机器视觉技术(人工智能)发展,相关技术已在农场品的品质检测和分级、农产品的生长环境控制等领域得到一定的应用。但在农业采摘领域,国外虽然早已开始研究,但是实际农业生产中的应用还不多。目前我国对机器视觉在农业上的应用大量集中在农业产品的检测领域,仅有极少数的学者将此技术应用于农场品的采摘领域,农业采摘机器人从出现发展至今已经有几十年,但是目前缺乏成熟的商业化产品,我国是农业大国,农业自动化装备对于实现“精确农业”技术具有重要意义,所以如何将最新的人工智能方向研究成果应用到农业自动化装备中的自动化采摘领域,研制出性能优秀的采摘机器人是有实际意义的。
发明内容
本发明所要解决的技术问题是针对上述现有技术的不足,提供一种全地形采摘机器人及其采摘方法。
本发明解决上述技术问题的技术方案如下:一种全地形采摘机器人,全地形采摘机器人,包括车架、两个后驱动总成、两个前桥总成、机械手组件、控制模块和电源模块,所述车架的后部和前部两侧分别设有后轮和独立驱动的前轮,且所述后轮通过对应的所述后驱动总成与所述车架的后部连接,所述前轮通过对应的所述前桥总成与所述车架的前部柔性连接,且当机器人行走于坑洼路面时,所述前轮带动所述前桥总成相对于所述车架动态转动,所述机械手组件设置在所述车架的顶部,所述控制模块分别与所述后驱动总成和前桥总成电连接,并可以控制所述后驱动总成和/或前桥总成带动所述车架运动,所述控制模块与所述机械手组件电连接,并可控制所述机械手组件运动,以完成对果实的采摘,所述电源模块分别与所述后驱动总成、前桥总成、机械手组件和控制模块电连接,并提供电源。
本发明的有益效果是:本发明的全地形机器人,通过所述后驱动总成和前桥总成分别驱动机器人行走和转向,并通过所述机械手组件运动和抓取,以完成对果实的采摘,通过模块化设计,整个机器人结构简单,便于安装和维护,通过所述前轮通过对应的所述前桥总成与所述车架的前部柔性连接,这样前桥总成可针对不平坦的地形动态调节,以更好的适应不同的地形和坡度下的采摘作业,后轮和前轮分别独立控制,脱困能力强,可以高效完成果实采摘。
在上述技术方案的基础上,本发明还可以做如下改进:
进一步:所述后驱动总成包括两个后轮悬架、两个后轮驱动电机和第一减震组件,两个所述后轮悬架分别设置在所述车架的后部两侧,所述后轮驱动电机一一对应设置在所述后轮悬架的内侧,两个所述后轮一一对应设置在所述后轮悬架的外侧,且所述后轮驱动电机与对应的所述后轮传动连接,并可以驱动对应的所述后轮转动,所述第一减震组件设置在所述后轮悬架与所述车架之间,且所述第一减震组件的一端与所述后轮悬架转动连接,另一端与所述车架连接,所述后轮驱动电机与所述控制模块电连接。
上述进一步方案的有益效果是:通过所述后轮驱动电机驱动对应的后轮转动,从而与所述前轮一并驱动机器人整体行走,同时所述第一减震组件可以在机器人行走过程过程中起到减震效果,保证机器人行走的稳定性。
进一步:所述前桥总成包括前桥、两个前轮转向电机、两个联轴器和两个叉型第二减震组件,所述前桥呈中间高两端低的拱形,所述前桥的中部与所述车架的前部对应一侧转动连接,所述前桥的两端分别设有内部中空的安装座,两个前轮转向电机分别设置在所述前桥的两端,且所述前轮转向电机的驱动端伸入对应的所述安装座内,并与对应的所述联轴器的上端传动连接,两个所述第二减震组件分别设置在所述前桥的两端,并位于所述前桥的下方,所述第二减震组件的上端伸入对应的所述安装座内,并与对应的所述联轴器的下端传动连接,所述第二减震组件的下端之间转动设有所述前轮,所述前轮转向电机可通过所述联轴器驱动对应的所述第二减震组件带动对应的所述前轮转动。
上述进一步方案的有益效果是:通过将所述前桥的中部与所述车架的前部对应一侧转动连接,并配合两个前轮,这样一方面可以在机器人行走至不平坦的路面时前桥可以自适应调整其与车架的角度,以满足全地形的采摘需求,另一方面每个所述前桥配合对应的两个前轮可以使得机器人行走在不平坦地形的路面时稳定性更好,保证机器人顺利完成采摘。
进一步:所述前桥的中部设有第一连接座,所述车架的前部对应一侧设有与所述第一连接座对应的第二连接座,所述第一连接座与所述第二连接座通过转轴转动连接,且所述第一连接座与所述第二连接之间可通过所述转轴转动,以根据不同的地形动态调整所述前桥与所述车架之间的角度。
上述进一步方案的有益效果是:通过所述转轴将所述第一连接座和第二连接座转动连接,这样在机器人行走至不平坦的路面时,所述前桥可通过所述转轴相对于所述车架转动,以自适应调整其与车架的角度,从而更好的适应不同地形的路面,保证机器人行走的可靠性。
进一步:所述机械手组件包括由两只机械手组成的双臂协同机械手和可周向转动的转动座,所述转动座设置在所述车架的顶部,所述机械手通过对应的机械臂与所述底座连接,且两只机械手对称设置与所述转动座的两侧,所述机械臂可驱动对应的所述机械手运动并抓取果实或对果实端部的枝叶进行剪切。
上述进一步方案的有益效果是:通过所述转动座可以驱动所述机械手运动,并抓取果实或对果实端部的枝叶进行剪切,从而顺利将果实从果树上采摘下来,配合机器人的行走,可以实现果实的自动采摘,大大提高采摘效率,降低人工强度。
进一步:所述的全地形采摘机器人还包括收集框,所述收集框设置在所述车架上,且所述机械臂可驱动对应的所述机械手运动,以将抓取的果实放入所述收集框内。
上述进一步方案的有益效果是:通过设置所述收集框可以方便所述机械手将抓取的果实放入所述收集框内,便于后续进行分批集中转移,提高采摘效率。
进一步:所述后驱动总成、前桥总成和机械手组件分别可拆卸设置在所述车架上。
上述进一步方案的有益效果是:通过将所述后驱动总成、前桥总成和机械手组件分别可拆卸设置在所述车架上,这样可以针对每个部分进行分别安装和拆卸,也大大方便后续维护与保养。
进一步:所述的全地形采摘机器人还包括采集模块,所述采集模块设置在所述车架上,所述采集模块与所述控制模块电连接,并用于采集采摘场地的环境信息和机器人的位姿信息;
所述控制模块,用于根据采摘场地的环境信息和机器人的位姿信息计算采摘机器人的采摘路径信息,并生成控制指令;
所述控制模块,用于根据所述控制指令控制所述后驱动总成和前桥总成分别驱动对应的所述后轮和前轮运动和转向,以控制机器人按照所述采摘路径行走,还用于根据控制指令控制双臂机械手组件运动,以完成对果实的采摘。
上述进一步方案的有益效果是:通过所述采集模块可以实时采集采摘场地的环境信息和机器人的位姿信息,这样控制模块对采摘场地的环境信息和机器人的位姿信息进行分析,计算出采摘路径,从而控制机器人按照采摘路径行走,同时控制所述机械手组件对果实进行采摘,实现全自动采摘,大大降低了采摘成本,提高了采摘效率。
本发明还提供了一种全地形采摘机器人的采摘方法,基于所述的全地形采摘机器人,所述方法包括如下步骤:
采集模块采集采摘场地的环境信息和机器人的位姿信息;
控制模块,根据采摘场地的环境信息和机器人的位姿信息计算采摘机器人的采摘路径信息,并生成控制指令;
控制模块,根据所述控制指令控制所述后驱动总成和前桥总成分别驱动对应的所述后轮和前轮运动和转向,以控制机器人按照所述采摘路径行走,同时根据控制指令控制双臂机械手组件运动,以完成对果实的采摘。
本发明的全地形采摘机器人的采摘方法,通过所述采集模块可以实时采集采摘场地的环境信息和机器人的位姿信息,这样控制模块对采摘场地的环境信息和机器人的位姿信息进行分析,计算出采摘路径,从而控制机器人按照采摘路径行走,同时控制所述机械手组件对果实进行采摘,实现全自动采摘,大大降低了采摘成本,提高了采摘效率。
附图说明
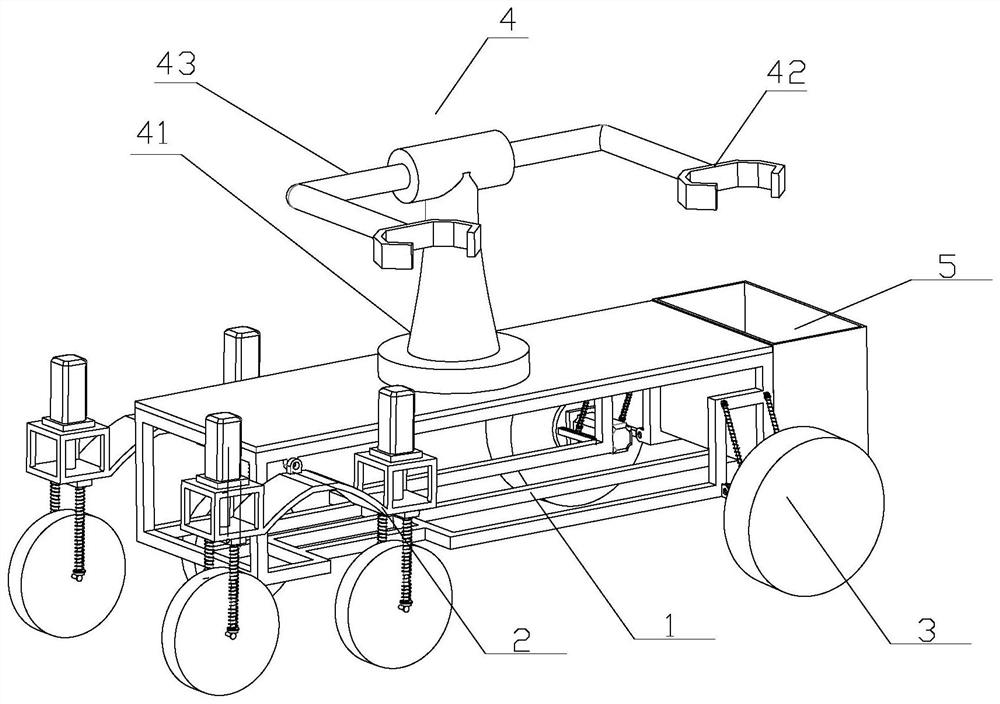
图1为本发明一实施例的全地形采摘机器人的结构示意图;
图2为本发明一实施例的车架的结构示意图;
图3为本发明一实施例的后驱动总成的结构示意图;
图4为本发明一实施例的前桥总成的结构示意图;
图5为本发明一实施例的前桥总成越障示意图;
图6为本发明一实施例的车轮分布示意图;
图7为本发明一实施例的转向控制示意图。
附图中,各标号所代表的部件列表如下:
1、车架,2、后驱动总成,3、前桥总成,4、机械手组件,5、收集框;
21、后轮悬架,22、后轮驱动电机,23、第一减震组件,24、后轮,31、前桥,32、前轮,33、前轮转向电机,34、联轴器,35、第二减震组件,41、转动座,42、机械手,43、机械臂。
具体实施方式
以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
如图1所示,一种全地形采摘机器人,包括车架1、两个后驱动总成2、两个前桥总成3、机械手组件4、控制模块和电源模块,所述车架1的后部和前部两侧分别设有后轮24和独立驱动的前轮32,且所述后轮24通过对应的所述后驱动总成2与所述车架1的后部连接,所述前轮32通过对应的所述前桥总成3与所述车架1的前部柔性连接,且当机器人行走于坑洼路面时,所述前轮32带动所述前桥总成3相对于所述车架1动态转动,所述机械手组件4设置在所述车架1的顶部,所述控制模块分别与所述后驱动总成2和前桥总成3电连接,并可以控制所述后驱动总成2和/或前桥总成3带动所述车架1运动,所述控制模块与所述机械手组件4电连接,并可控制所述机械手组件4运动,以完成对果实的采摘,所述电源模块分别与所述后驱动总成2、前桥总成3、机械手组件4和控制模块电连接,并提供电源。
本发明的全地形机器人,通过所述后驱动总成2和前桥总成3分别驱动机器人行走和转向,并通过所述机械手组件4运动和抓取,以完成对果实的采摘,通过模块化设计,整个机器人结构简单,便于安装和维护,通过所述前轮32通过对应的所述前桥总成3与所述车架1的前部柔性连接,这样前桥总成3可针对不平坦的地形动态调节,以更好的适应不同的地形和坡度下的采摘作业,后轮24和前轮32分别独立控制,脱困能力强,可以高效完成果实采摘。
如图2所示,在本发明的实施例中,所述车架1为主要承重结构,承受来自路面和机械手组件4的载荷,是全地形机器人的主要承载部件。综合考虑全地形车的强度、刚度要求,同时采用轻量化的原则,车架1由高强度的方钢一体化焊接而成,同时设置后驱动总成2、前桥总成3、机械手组件4等模块的安装接口,方便安装和拆卸。
本发明中,所述车架1内预留控制模块和电源模块的放置区域,每个安装接口的位置分别设置了加强结构,在保证机器人结构强度的同时,最大化的利用内部空间,布局紧凑合理。
如图3所示,在本发明的一个或多个实施例中,所述后驱动总成2包括两个后轮悬架21、两个后轮驱动电机22和第一减震组件23,两个所述后轮悬架21分别设置在所述车架1的后部两侧,所述后轮驱动电机22一一对应设置在所述后轮悬架21的内侧,两个所述后轮24一一对应设置在所述后轮悬架21的外侧,且所述后轮驱动电机22与对应的所述后轮24传动连接,并可以驱动对应的所述后轮24转动,所述第一减震组件23设置在所述后轮悬架21与所述车架1之间,且所述第一减震组件23的一端与所述后轮悬架21转动连接,另一端与所述车架1连接,所述后轮驱动电机22与所述控制模块电连接。通过所述后轮驱动电机22驱动对应的后轮24转动,从而与所述前轮32一并驱动机器人整体行走,同时所述第一减震组件23可以在机器人行走过程过程中起到减震效果,保证机器人行走的稳定性。比如,在通过坑洼路面遇到单轮打滑时,控制模块可以控制减少打滑侧后轮驱动电机22的功率输出,增加对侧后轮驱动电机22的功率输出,这样可以大大增强全地形车的全地形工作能力。
实际中,充分考虑全地形的要求,每组后驱动总成2由两个弹簧减震器组成第一减震组件23,保证坑洼路面的通过性和减震性,全地形车由两组后驱动总成2组成,每组总成与车架分别设有安装接口,方便安装与更换。
如图4所示,在本发明的一个或多个实施例中,所述前桥总成3包括前桥31、两个前轮转向电机33、两个联轴器34和两个叉型第二减震组件35,所述前桥31呈中间高两端低的拱形,所述前桥31的中部与所述车架1的前部对应一侧转动连接,所述前桥31的两端分别设有内部中空的安装座,两个前轮转向电机33分别设置在所述前桥31的两端,且所述前轮转向电机33的驱动端伸入对应的所述安装座内,并与对应的所述联轴器34的上端传动连接,两个所述第二减震组件35分别设置在所述前桥1的两端,并位于所述前桥31的下方,所述第二减震组件35的上端伸入对应的所述安装座内,并与对应的所述联轴器34的下端传动连接,所述第二减震组件35的下端之间转动设有所述前轮32,所述前轮转向电机33可通过所述联轴器34驱动对应的所述第二减震组件35带动对应的所述前轮32转动。通过将所述前桥31的中部与所述车架1的前部对应一侧转动连接,并配合两个前轮32,这样一方面可以在机器人行走至不平坦的路面时前桥31可以自适应调整其与车架1的角度,以满足全地形的采摘需求,另一方面每个所述前桥31配合对应的两个前轮32可以使得机器人行走在不平坦地形的路面时稳定性更好,保证机器人顺利完成采摘。
这里,每组前桥总成3结构一致,前桥总成3由前桥31、两个前轮转向电机33和两个叉型第二减震组件35组成,考虑全地形的要求,前桥总成2也为独立悬架结构,每组前桥总成由2四个弹簧减震器组成两个第二减震组件35,同时两组前桥总成2通过前桥21与车架1为柔性连接,可根据不同的坡度要求自适应调整前桥21与车架1之间的角度,大大增强了全地形车在复杂路面的通过性和爬坡越野能力,每组前桥总成2与车架1设有安装口,方便安装与更换。另外,这里,前轮32中自带私服电机与电子刹,分别与控制模块电连接,由控制模块控制其行走和转向,包括控制轮子的线速度、转向的角度和电子刹的开合。
本发明的全地形采摘机器人,充分考虑全地形的要求,如坑洼路面,山地,沙土地等特殊的路况,同时保证机械手组件4在果实采摘过程中的稳定性要求,采用六轮独立悬架结构,六轮都由独立电机驱动,前部的四个前轮32作为车架1的前部行走行走机构,每个前轮32分别自带一个驱动其转动的行走电机,后轮24通过对应的后轮驱动电机22驱动其转动,同时配合前轮转向电机33驱动对应的前轮32转向,这样可以实现机器人的正常行走和转向。
如图5所示,为本发明的采摘机器人的越障示意图,如图所示的为左右角度不一致且坡度较大的陡坡,全地形机器人通过柔性前桥设计,左右前桥21根据坡度的不同自动调节角度适应路况,且六轮都为独立悬架,具有良好的减震和通过性。
在本发明的一个或多个实施例中,所述前桥31的中部设有第一连接座,所述车架1的前部对应一侧设有与所述第一连接座对应的第二连接座,所述第一连接座与所述第二连接座通过转轴转动连接,且所述第一连接座与所述第二连接之间可通过所述转轴转动,以根据不同的地形动态调整所述前桥31与所述车架1之间的角度。通过所述转轴将所述第一连接座和第二连接座转动连接,这样在机器人行走至不平坦的路面时,所述前桥31可通过所述转轴相对于所述车架1转动,以自适应调整其与车架1的角度,从而更好的适应不同地形的路面,保证机器人行走的可靠性。
在本发明的一个或多个实施例中,所述机械手组件4包括由两只机械手42组成的双臂协同机械手和可周向转动的转动座41,所述转动座41设置在所述车架1的顶部,所述机械手42通过对应的机械臂43与所述底座41连接,且两只机械手42对称设置与所述转动座41的两侧,所述机械臂43可驱动对应的所述机械手42运动并抓取果实或对果实端部的枝叶进行剪切。通过所述转动座41可以驱动所述机械手42运动,并抓取果实或对果实端部的枝叶进行剪切,从而顺利将果实从果树上采摘下来,配合机器人的行走,可以实现果实的自动采摘,大大提高采摘效率,降低人工强度。
为保证采摘作业的高效性和对果实的无损性,全地形采摘机器人采摘机械手使用双臂协同机械手,一只机械手42负责抓取果实和将采摘完成后的果实放入收集筐5,另一只机械手42负责果实端部枝叶的剪切。车架1设有安装孔位,机械手组件4和收集筐5通过安装孔位可拆卸安装于车架1上。
可选地,在本发明的一个或多个实施例中,所述的全地形采摘机器人还包括收集框5,所述收集框5设置在所述车架1上,且所述机械臂43可驱动对应的所述机械手42运动,以将抓取的果实放入所述收集框5内。通过设置所述收集框5可以方便所述机械手42将抓取的果实放入所述收集框5内,便于后续进行分批集中转移,提高采摘效率。
可选地,在本发明的一个或多个实施例中,所述后驱动总成2、前桥总成3和机械手组件4分别可拆卸设置在所述车架1上。通过将所述后驱动总成2、前桥总成3和机械手组件4分别可拆卸设置在所述车架1上,这样可以针对每个部分进行分别安装和拆卸,也大大方便后续维护与保养。
在本发明的一个或多个实施例中,所述的全地形采摘机器人还包括采集模块,所述采集模块设置在所述车架1上,所述采集模块与所述控制模块电连接,并用于采集采摘场地的环境信息和机器人的位姿信息;
所述控制模块,用于根据采摘场地的环境信息和机器人的位姿信息计算采摘机器人的采摘路径信息,并生成控制指令;
所述控制模块,用于根据所述控制指令控制所述后驱动总成2和前桥总成3分别驱动对应的所述后轮24和前轮32运动和转向,以控制机器人按照所述采摘路径行走,还用于根据控制指令控制双臂机械手组件4运动,以完成对果实的采摘。
通过所述采集模块可以实时采集采摘场地的环境信息和机器人的位姿信息,这样控制模块对采摘场地的环境信息和机器人的位姿信息进行分析,计算出采摘路径,从而控制机器人按照采摘路径行走,同时控制所述机械手组件4对果实进行采摘,实现全自动采摘,大大降低了采摘成本,提高了采摘效率。
这里,采集模块包括惯导模块:为机器人提供GPS绝对坐标(经度和纬度信号)和相对位置坐标(通过磁偏角信号来计算机器人的姿势);
视觉模块:为机器人获取周围的环境信息,机器人能够更新环境中采摘目标,完成路径规划算法;
光电传感器模块:为机器人提供获取采摘目标数量的信息,使机器人在计算路径规划算法上得到优化;
电机驱动和编码模块:实现机器人运动控制和速度测定。
在全地形采摘机器人的运行过程中,利用采集机器人的位置信息,同时利用视觉模块将采集图像信息给控制模块的运算单元,机器人利用这些图像信息来创建或修改环境信息,通过位置比对、路径规划等相关算法,产生控制指令给控制模块中的运动控制单元,运动控制单元在接收运算单元传输的指令的同时接收功能硬件的传感器(如光电传感模块)的控制指令,综合处理后产生控制指令给对应的驱动电机,即完成了对机器人平台的自主决策和自主控制。
如图6和图7所示,在转向时,基于机器人的结构,每个轮子的转向角度和转向线速度均不同。在转向时候采用如下策略进行转向:左转向时候1轮为目标转向角度和目标转向速度,其余轮子根据1轮进行计算,右转向时6轮为目标转向角度和速度,其余轮子根据6轮计算。左转向时,有如下模型,输入量为转向角度θ,转向速度V。固定参数有车架(底盘)的宽度W,前间距L
根据转向规则和转向模型可知:
θ
θ
θ
类似的,右转向时,有如下模型输入量为转向角度θ,转向速度V。固定参数有车架(底盘)宽度W,前间距L
根据转向规则和转向模型可知:
θ
θ
θ
依据上述转向原理与模型,机器人在控制转向时候,由控制器根据机器人实际模型参数运算各个轮子的转向角与线速度,并动态控制各个轮子的状态,并最终实现对机器人整体的控制,在非转向时,各个轮子转向角度为0且速度等于目标速度。
本发明的全地形采摘机器人,在全地形的条件下对一定形状和大小的果实进行自动采摘作业,通过机器视觉、机械手和全地形车三者相结合实现自动采摘,满足不同工作条件下的采摘要求,大大扩宽了自动农业采摘的工作范围。
本发明还提供了一种全地形采摘机器人的采摘方法,基于所述的全地形采摘机器人,所述方法包括如下步骤:
采集模块采集采摘场地的环境信息和机器人的位姿信息;
控制模块,根据采摘场地的环境信息和机器人的位姿信息计算采摘机器人的采摘路径信息,并生成控制指令;
控制模块,根据所述控制指令控制所述后驱动总成2和前桥总成3分别驱动对应的所述后轮24和前轮32运动和转向,以控制机器人按照所述采摘路径行走,同时根据控制指令控制双臂机械手组件4运动,以完成对果实的采摘。
本发明的全地形采摘机器人的采摘方法,通过所述采集模块可以实时采集采摘场地的环境信息和机器人的位姿信息,这样控制模块对采摘场地的环境信息和机器人的位姿信息进行分析,计算出采摘路径,从而控制机器人按照采摘路径行走,同时控制所述机械手组件4对果实进行采摘,实现全自动采摘,大大降低了采摘成本,提高了采摘效率。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种全地形采摘机器人
- 一种全地形花生采摘脱壳一体机