基于人工智能视觉检测系统的大型物料输送设备
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及输送设备技术领域,具体为基于人工智能视觉检测系统的大型物料输送设备。
背景技术
在物料的运输过程中,为了能保证产品的高质量,检测环节发挥着重要的作用,基于人工智能视觉检测,也逐渐被人们所使用。
目前现有的输送设备,通常将物料直接倒入料斗内,致使下料速率不佳,下料后物料易出现叠放的情况,同时传送带对物料进行固定速率的传送,使得视觉检测器可能不能有效的对物料进行视觉检测,通常后续还需要对此进行检测,实用性不佳。
发明内容
本发明的目的在于提供基于人工智能视觉检测系统的大型物料输送设备,具备了通过对物料的间歇下料,配合对料斗的震动,使得减少物料堆叠的情况,同时不需要使用者逐个的进行下料,增大了使用效率,同时配合对物料进行间歇性输送,使得给予视觉检测器充分的时间,具备了实用性更佳的效果,解决了现有的输送设备,通常将物料直接倒入料斗内,致使下料速率不佳,下料后物料易出现叠放的情况,同时传送带对物料进行固定速率的传送,使得视觉检测器可能不能有效的对物料进行视觉检测,通常后续还需要对此进行检测,实用性不佳的问题。
为实现上述目的,本发明提供如下技术方案:基于人工智能视觉检测系统的大型物料输送设备,包括底座,所述底座的上表面固定连接有支撑板,所述支撑板的上表面固定连接有料斗,所述料斗的右侧固定连接有连接板,所述连接板的下表面固定连接有固定板一和固定板二,所述固定板一的表面定轴转动连接有转轴一,所述固定板二的表面固定连接有电机一,所述转轴一的表面和所述电机一的转动部分别固定连接有齿轮和不完全齿轮,所述支撑板的右侧固定连接有限位杆,所述限位杆的表面滑动套接有滑动块,所述滑动块的上表面开设有齿条,所述齿条的齿槽部与所述齿轮的齿槽部相啮合,所述滑动块的上表面开设有开口一,所述开口一与所述料斗的下料口间歇性重合,所述转轴一的表面设置有使所述料斗内的物料发生震动的敲击部件,所述底座的上表面设置有使所述物料进行间歇性传送的传送机构,所述底座和所述连接板的相对侧均设置有视觉检测器。
可选的,所述敲击部件包括转臂一,所述转臂一的右侧与所述转轴一的表面铰接,所述转臂一的左侧铰接有转臂二,所述转臂二的左侧铰接有转臂三,所述料斗的右侧固定连接有限位柱,所述限位柱的表面滑动连接有敲击块,所述敲击块的右侧与所述转臂三的左侧固定连接。
可选的,所述传送机构包括固定块一和固定块二,所述固定块一和所述固定块二的下表面与所述底座的上表面固定连接,所述固定块一和所述固定块二的表面均铰接有转轴二,两个所述转轴二的表面均固定连接有传送轮,两个所述传送轮的表面共同设置有传送带,还包括间歇部件。
可选的,所述间歇部件包括转盘,所述转盘的表面与所述转轴二的表面固定连接,所述转盘的表面开设有十字形槽,所述转盘通过所述十字形槽滑动连接有滑柱,所述滑柱的表面铰接有偏转板,所述偏转板的端部铰接有偏转块,所述偏转板的表面固定连接有扰动板,所述偏转块的端部固定连接有转轴三,所述转轴三的背侧定轴转动连接有承重块二,所述承重块二的下表面与所述底座的上表面固定连接,所述偏转板的中心部铰接有限位块,所述限位块的端部铰接有承重块一,所述承重块一的下表面与所述底座的上表面固定连接,还包括连接部件。
可选的,所述连接部件包括卡板,所述卡板的表面与所述转轴三的表面固定连接,所述转轴二的表面固定连接有承重板,所述承重板的表面开设有弧形开口,所述弧形开口与所述卡板间歇性贴合。
可选的,所述转轴三与所述电机一之间通过传动部件进行连接。
可选的,所述传动部件包括皮带传动机构,所述皮带传动机构的一端与所述转轴三的表面固定连接,所述皮带传动机构的另一端与所述电机一的转动部固定连接。
可选的,所述底座的上表面固定连接有遮挡板,所述连接板的下表面固定连接有电机二,所述电机二的转动部固定连接有连接块,所述连接块的下表面固定连接有扫料板,所述扫料板的下表面固定连接有扫料块,所述传送带为透明状。
与现有技术相比,本发明的有益效果如下:
一、本发明通过驱动电机一转动部的运转,使得开口一与料斗的出料口间歇性重合,使得物料实现间歇性下料的特点,相较于一般的直接投放物料的方式,可能使得物料堆叠在一起,不利于后续对物料的视觉检测,本方式通过间歇下料的方式,使得物料不会轻易堆叠在一起,同时使用者可将本次需传送的物料直接投入料斗内,不需要使用者逐个投放,使得本装置下料的效率更高。
二、本发明通过齿轮的转动,使得敲击块往复横移并敲打料斗,使得料斗震动,使得内部的物料发生抖动,使得本装置的下料效率更佳,同时物料发生抖动,减少了物料堆叠在一起的情况。
三、本发明通过电机一转动部的运转,进而在带动滑柱顺时针偏转的同时,滑柱抵压着十字形槽,带动转盘进行顺时针转动,同时卡板转动,当卡板转动且与承重板的弧形面相贴合时,使得转盘发生停滞,以此往复,使得转盘发生间歇性转动,同时扰动板发生顺时针的摆动,使得物料落入传送带时,通过对物料的间歇性传送,使得物料在视觉检测器检测时,可给予视觉检测器充分的时间进行检测,避免因传送速率的不一,使得视觉检测器的检测效果不佳,以致于还要进行二次检测的情况,同时通过扰动板的往复摆动,使得落入传送带的物力被扰动板扰动,使得对物料其打散的作用,可减少物料的堆叠情况,实用性更佳。
四、本发明通过电机二转动部的运转,带动扫料块进行转动,使用者可提前调整扫料块的高度,使得扫料块与传送带的相对距离为一个物料的厚度,使得可扫除堆叠在一起的物料,保证了物料的视觉检测情况,当物料传送至两个视觉检测器的相对侧时,因设置透明的传送带,可及时的对物料的正反面进行视觉检测,使得本检测方式的实用性更佳,相较于一般的翻转物料或多次检测,本方式操作简单,效率较高。
附图说明
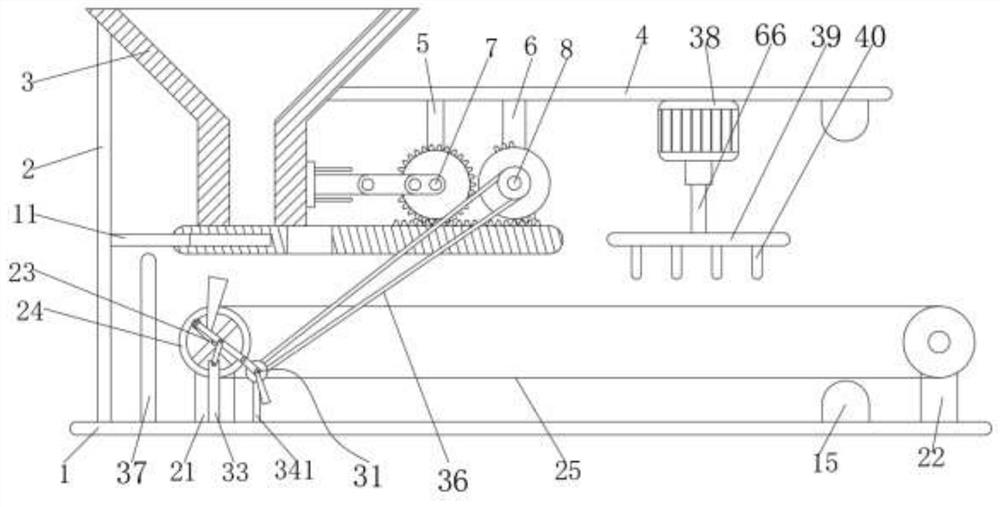
图1为本发明结构的第一状态主视图;
图2为本发明敲击部件结构的正视图;
图3为本发明传动机构结构的第一状态第一正视图;
图4为本发明传动机构结构的第二状态正视图;
图5为本发明传动机构结构的第一状态第二正视图。
图中:1、底座;2、支撑板;3、料斗;4、连接板;5、固定板一;6、固定板二;7、转轴一;8、电机一;9、齿轮;10、不完全齿轮;11、限位杆;12、滑动块;13、齿条;14、开口一;15、视觉检测器;16、转臂一;17、转臂二;18、转臂三;19、限位柱;20、敲击块;21、固定块一;22、固定块二;23、转轴二;24、传送轮;25、传送带;26、转盘;27、十字形槽;28、滑柱;29、偏转板;30、偏转块;31、转轴三;32、限位块;33、承重块一;34、卡板;35、承重板;36、皮带传动机构;37、遮挡板;38、电机二;39、扫料板;40、扫料块;42、扰动板;341、承重块二;66、连接块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图5,本发明提供一种技术方案:基于人工智能视觉检测系统的大型物料输送设备,包括底座1,所述底座1的上表面固定连接有支撑板2,所述支撑板2的上表面固定连接有料斗3,所述料斗3的右侧固定连接有连接板4,所述连接板4的下表面固定连接有固定板一5和固定板二6,所述固定板一5的表面定轴转动连接有转轴一7,所述固定板二6的表面固定连接有电机一8,所述转轴一7的表面和所述电机一8的转动部分别固定连接有齿轮9和不完全齿轮10,所述支撑板2的右侧固定连接有限位杆11,所述限位杆11的表面滑动套接有滑动块12,所述滑动块12的上表面开设有齿条13,所述齿条13的齿槽部与所述齿轮9的齿槽部相啮合,所述滑动块12的上表面开设有开口一14,所述开口一14与所述料斗3的下料口间歇性重合,所述转轴一7的表面设置有使所述料斗3内的物料发生震动的敲击部件,所述底座1的上表面设置有使所述物料进行间歇性传送的传送机构,所述底座1和所述连接板4的相对侧均设置有视觉检测器15,在使用时,使用者将物料投入料斗3内,通过驱动电机一8转动部的运转,带动不完全齿轮10转动,通过不完全齿轮10的转动,带动滑动块12向左移动,当不完全齿轮10与齿条13不再啮合,而与齿轮9啮合时,带动滑动块12向右移动,进而使得滑动块12往复横移,使得开口一14与料斗3的出料口间歇性重合,使得物料实现间歇性下料的特点,相较于一般的直接投放物料的方式,可能使得物料堆叠在一起,不利于后续对物料的视觉检测,本方式通过间歇下料的方式,使得物料不会轻易堆叠在一起,同时使用者可将本次需传送的物料直接投入料斗3内,不需要使用者逐个投放,使得本装置下料的效率更高,通过敲击部件的作用,使得料斗3震动,使得内部的物料发生抖动,使得本装置的下料效率更佳,同时物料发生抖动,减少了物料堆叠在一起的情况,通过传送机构的作用,使得物料落入传送带25时,通过对物料的间歇性传送,使得物料在视觉检测器15检测时,可给予视觉检测器15充分的时间进行检测,避免因传送速率的不一,使得视觉检测器15的检测效果不佳,以致于还要进行二次检测的情况,同时通过扰动板42的往复摆动,使得落入传送带25的物力被扰动板42扰动,使得对物料其打散的作用,可减少物料的堆叠情况,实用性更佳。
进一步的,所述敲击部件包括转臂一16,所述转臂一16的右侧与所述转轴一7的表面铰接,所述转臂一16的左侧铰接有转臂二17,所述转臂二17的左侧铰接有转臂三18,所述料斗3的右侧固定连接有限位柱19,所述限位柱19的表面滑动连接有敲击块20,所述敲击块20的右侧与所述转臂三18的左侧固定连接,通过齿轮9的转动,带动转轴一7转动,通过转轴一7的转动,带动转臂一16和转臂二17进行偏转,且通过限位柱19对敲击块20位移方向的限制,使得敲击块20往复横移并敲打料斗3。
进一步的,所述传送机构包括固定块一21和固定块二22,所述固定块一21和所述固定块二22的下表面与所述底座1的上表面固定连接,所述固定块一21和所述固定块二22的表面均铰接有转轴二23,两个所述转轴二23的表面均固定连接有传送轮24,两个所述传送轮24的表面共同设置有传送带25,还包括间歇部件,通过间歇部件的作用,带动转轴二23间歇性转动,通过转轴二23的间歇性转动,带动传送带25间歇性传动。
进一步的,所述间歇部件包括转盘26,所述转盘26的表面与所述转轴二23的表面固定连接,所述转盘26的表面开设有十字形槽27,所述转盘26通过所述十字形槽27滑动连接有滑柱28,所述滑柱28的表面铰接有偏转板29,所述偏转板29的端部铰接有偏转块30,所述偏转板30的表面固定连接有扰动板42,所述偏转块30的端部固定连接有转轴三31,所述转轴三31的背侧定轴转动连接有承重块二341,所述承重块二341的下表面与所述底座1的上表面固定连接,所述偏转板29的中心部铰接有限位块32,所述限位块32的端部铰接有承重块一33,所述承重块一33的下表面与所述底座1的上表面固定连接,还包括连接部件,通过转轴三31的转动,带动偏转块30和偏转板29进行偏转,且由于滑柱28与十字形槽27的滑动配合关系,以及限位块32对偏转板29位移方向的限定,进而在带动滑柱28顺时针偏转的同时,滑柱28抵压着十字形槽27,带动转盘26进行顺时针转动,如图3所示状态至如图4所示状态,此时通过偏转块30的继续转动,使得滑柱28在十字形槽27内进行滑动,配合连接部件的作用,以此往复,使得转盘26发生间歇性转动,同时扰动板42发生顺时针的摆动。
进一步的,所述连接部件包括卡板34,所述卡板34的表面与所述转轴三31的表面固定连接,所述转轴二23的表面固定连接有承重板35,所述承重板35的表面开设有弧形开口,所述弧形开口与所述卡板34间歇性贴合,通过转轴三31的转动,带动卡板34转动,如图5所示,当卡板34转动且与承重板35的弧形面相贴合时,使得转盘26发生停滞,进而使得滑柱28进入下一个十字形槽27的滑槽内。
进一步的,所述转轴三31与所述电机一8之间通过传动部件进行连接。
进一步的,所述传动部件包括皮带传动机构36,所述皮带传动机构36的一端与所述转轴三31的表面固定连接,所述皮带传动机构36的另一端与所述电机一8的转动部固定连接,通过电机一8转动部的运转,配合皮带传动机构36的传动关系,带动转轴三31转动。
进一步的,所述底座1的上表面固定连接有遮挡板37,所述连接板4的下表面固定连接有电机二38,所述电机二38的转动部固定连接有连接块66,所述连接块66的下表面固定连接有扫料板39,所述扫料板39的下表面固定连接有扫料块40,所述传送带25为透明状,通过设置遮挡板37,避免物料下料过程中的飞溅,通过电机二38转动部的运转,带动连接块66、扫料板39和扫料块40进行转动,使用者可提前调整扫料块40的高度,使得扫料块40与传送带25的相对距离为一个物料的厚度,使得可扫除堆叠在一起的物料,保证了物料的视觉检测情况,当物料传送至两个视觉检测器15的相对侧时,因设置透明的传送带25,可及时的对物料的正反面进行视觉检测,使得本检测方式的实用性更佳,相较于一般的翻转物料或多次检测,本方式操作简单,效率较高。
工作原理:该基于人工智能视觉检测系统的大型物料输送设备在使用时,在物料的运输过程中,为了能保证产品的高质量,检测环节发挥着重要的作用,基于人工智能视觉检测,也逐渐被人们所使用,本装置在使用时,使用者将物料投入料斗3内,通过驱动电机一8转动部的运转,带动不完全齿轮10转动,通过不完全齿轮10的转动,带动滑动块12向左移动,当不完全齿轮10与齿条13不再啮合,而与齿轮9啮合时,带动滑动块12向右移动,进而使得滑动块12往复横移,使得开口一14与料斗3的出料口间歇性重合,使得物料实现间歇性下料的特点,相较于一般的直接投放物料的方式,可能使得物料堆叠在一起,不利于后续对物料的视觉检测,本方式通过间歇下料的方式,使得物料不会轻易堆叠在一起,同时使用者可将本次需传送的物料直接投入料斗3内,不需要使用者逐个投放,使得本装置下料的效率更高;
通过齿轮9的转动,带动转轴一7转动,通过转轴一7的转动,带动转臂一16和转臂二17进行偏转,且通过限位柱19对敲击块20位移方向的限制,使得敲击块20往复横移并敲打料斗3,使得料斗3震动,使得内部的物料发生抖动,使得本装置的下料效率更佳,同时物料发生抖动,减少了物料堆叠在一起的情况;
通过电机一8转动部的运转,配合皮带传动机构36的传动关系,带动转轴三31转动,通过转轴三31的转动,带动偏转块30和偏转板29进行偏转,且由于滑柱28与十字形槽27的滑动配合关系,以及限位块32对偏转板29位移方向的限定,进而在带动滑柱28顺时针偏转的同时,滑柱28抵压着十字形槽27,带动转盘26进行顺时针转动,如图3所示状态至如图4所示状态,此时通过偏转块30的继续转动,使得滑柱28在十字形槽27内进行滑动,同时卡板34转动,如图5所示,当卡板34转动且与承重板35的弧形面相贴合时,使得转盘26发生停滞,进而使得滑柱28进入下一个十字形槽27的滑槽内,以此往复,使得转盘26发生间歇性转动,同时扰动板42发生顺时针的摆动,通过转盘26的间歇性转动,且配合转轴二23的连接关系,带动传送带25间歇性传动,使得物料落入传送带25时,通过对物料的间歇性传送,使得物料在视觉检测器15检测时,可给予视觉检测器15充分的时间进行检测,避免因传送速率的不一,使得视觉检测器15的检测效果不佳,以致于还要进行二次检测的情况,同时通过扰动板42的往复摆动,使得落入传送带25的物力被扰动板42扰动,使得对物料其打散的作用,可减少物料的堆叠情况,实用性更佳;
通过电机二38转动部的运转,带动连接块66、扫料板39和扫料块40进行转动,使用者可提前调整扫料块40的高度,使得扫料块40与传送带25的相对距离为一个物料的厚度,使得可扫除堆叠在一起的物料,保证了物料的视觉检测情况,当物料传送至两个视觉检测器15的相对侧时,因设置透明的传送带25,可及时的对物料的正反面进行视觉检测,使得本检测方式的实用性更佳,相较于一般的翻转物料或多次检测,本方式操作简单,效率较高;
本装置相较于一般的装置,本装置更具实用性,一般的输送设备,通常将物料直接倒入料斗3内,致使下料速率不佳,下料后物料易出现叠放的情况,同时传送带25对物料进行固定速率的传送,使得视觉检测器15可能不能有效的对物料进行视觉检测,通常后续还需要对此进行检测,实用性不佳,本装置通过对物料的间歇下料,配合对料斗3的震动,使得减少物料堆叠的情况,同时不需要使用者逐个的进行下料,增大了使用效率,同时配合对物料进行间歇性输送,使得给予视觉检测器15充分的时间,具备了实用性更佳的效果。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 基于人工智能视觉检测系统的大型物料输送设备
- 一种基于同步驱动技术的碳酸钙制备物料输送设备