油气管道工程基坑实景三维测量系统及方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及管道工程建设技术领域,更具体涉及一种油气管道工程基坑实景三维测量系统及方法。
背景技术
油气管道作为能源运输的重要工具,一旦发生泄漏或者爆炸事故,将严重威胁人民群众的生命和财产安全,因此管道的安全巡护与管理非常重要。国家油气管道保护法规定:在管道线路中心线两侧各五米地域范围内,禁止种植深根植物、挖掘施工、违章修建等行为。然而,上述危害油气管道安全的行为却时有发生,甚至造成不可挽回的损失。
在管道工程建设监理过程中,需要对基坑施工单位实施的工程是否满足前期设计的规范、标准和质量进行快速测量及评价,若存在问题需及时告知整改。传统的衡量方法主要靠有经验的人员进行人工测量,存在测量耗时长、成本高等方面的问题。在房屋确权、土地测量等方面实景三维测绘技术已经得到了初步的推广与应用,但是由于管道基坑底部与侧围土质颜色相近,并且由于挖掘机挖掘过程中基坑边线弧度大、直线度较差等方面问题,实景三维测量技术在管道基坑测量过程中没有得到较好地推广与应用。
发明内容
本发明需要解决的技术问题是提供一种油气管道工程基坑实景三维测量系统及方法,以解决背景技术中的问题,以实现控制点模块的自动放置,提高油气管道工程基坑实景三维测量精度及效率。
为解决上述技术问题,本发明所采取的技术方案如下。
油气管道工程基坑实景三维测量系统,包括:
基站;
控制点模块,设置有若干个且分别间隔插装设置在基坑周边;所述控制点模块与基站进行无线通讯并能够将自身位置信息实时传送到基站;
自动放置装置,内部盛放有若干待插装的控制点模块,并能够在行进过程中接收到基站发出的控制指令后将各控制点模块间隔插装至基坑周边;所述自动放置装置与基站进行无线通讯并能够将自身位置信息实时传送到基站;
无人机,在基坑上方飞行拍摄视频,与控制点模块进行实时的数据交换,能够获取各控制点模块的图像信息并能够进行空中三角测量运算,获得有关基坑的测量数据。
进一步优化技术方案,所述自动放置装置包括:
车体,车体连接设置有用于对待插装的控制点模块进行盛装的车厢;
车轮,设置在车体底端并通过车轮驱动机构进行移动;
支架,滑动配装在车体的两侧并通过设置在车体上的第一驱动机构沿车体侧壁移动;
抓取装置,滑动配装在支架上并通过设置在支架上的第二驱动机构沿与车体侧壁垂直的方向移动;所述抓取装置的底端设置有能够进行升降并对放置在车厢内待插装的控制点模块进行抓取的抓手;
车载无线通讯模块,与基站进行无线通讯;
车载定位模块,对自动放置装置的位置进行定位;
电控系统模块,接收车载定位模块传输的位置信息并将位置信息通过车载无线通讯模块传输至基站;所述车轮驱动机构、第一驱动机构、第二驱动机构和抓取装置的受控端分别连接于电控系统模块的输出端。
进一步优化技术方案,所述控制点模块包括:
外壳,底端设置为尖锥状;所述外壳的侧部设置有卡槽;
定位模块,对控制点模块的位置进行定位;
无线通讯模块,与基站进行无线通讯;
单片机模块,接收定位模块传输的位置信息并将位置信息通过无线通讯模块传输至基站;
电池模块,对控制点模块进行供电。
进一步优化技术方案,所述无人机包括无人机体以及设置在无人机体内的测量系统;所述测量系统包括:
无人机视频获取装置,在基坑上方多角度对基坑拍摄视频,并通过无人机搭载的无线通讯模块与控制点模块进行实时的数据交换;
视频处理装置,将拍摄的视频进行抽帧处理,并将抽帧图像进行预处理,再进行建模信息处理,生成三维模型,生成基坑工程参数。
油气管道工程基坑实景三维测量方法,其特征在于,该方法基于所述的油气管道工程基坑实景三维测量系统进行,包括以下步骤:
S1、根据基坑的参数信息,将自动放置装置的行车轨迹输入至自动放置装置的电控系统模块中,自动放置装置按照行车轨迹在基坑的测量边缘及坑上、坑下自动放置控制点模块;
S2、控制点模块放置完成后,各控制点模块分别将位置信息反馈至基站,无人机在基坑上方飞行并多角度对基坑拍摄视频,且无人机与控制点模块进行实时的数据交换,将拍摄的视频进行抽帧处理,并将抽帧图像进行预处理,再进行建模信息处理,生成三维模型,生成基坑工程参数。
进一步优化技术方案,所述步骤S1中,自动放置装置自动放置控制点模块的步骤为:
S101、通过抓取装置抓取存放在车厢内部的控制点模块,将控制点模块抓起后,抓取装置和控制点模块在第二驱动机构的驱动下移动至车侧;
S102、自动放置装置接收到放置控制点模块的指令时,自动放置装置停止前进,抓取装置中的抓手向下运动,带动控制点模块下压进土层内;
S103、自动放置装置复位,继续进行下一次抓取控制点模块的动作;依次完成对各控制点模块的插装。
进一步优化技术方案,将拍摄的视频进行抽帧处理的方法是用变帧距的抽帧方式,根据采集图像的位置信息,在特定的位置与其余位置进行抽帧的方式不同。
进一步优化技术方案,对预处理后的图像进行建模信息处理的方法包括以下步骤:
S201、进行关键点的提取、自动连接点匹配;
S202、通过计算机图形计算,结合pos信息空三处理,进行区域整体平差、集束调整、多视角影像密集匹配,生成点云,点云构成三维TIN格网,格网结合图片生成白体三维模型;
S203、进行自主纹理映射、纹理贴图包装、细节层次生成,输出赋有纹理的三维模型。
进一步优化技术方案,所述基坑工程参数包括基坑的断面尺寸、基坑的深度、基坑的坡度参数。
由于采用了以上技术方案,本发明所取得技术进步如下。
本发明能够通过自动放置装置按照行进轨迹自动插装控制点模块,控制点模块的位置信息能够实时反馈至基站,相对于现有技术解决了自动放置控制点放置困难的问题,同时还为后期的数据处理及确定基坑边缘位置轮廓参数等方面提供了方便,对于提高油气管道工程基坑实景三维测量精度及效率有重要的意义与作用。
本发明采用带定位功能的控制点模块进行基坑内位置的标记,并能够与基站进行信息交互,十分精确地确定其位置,可以提升参数信息获取的效率、提高定位信息的精度及提高本测量系统的自动化程度。
附图说明
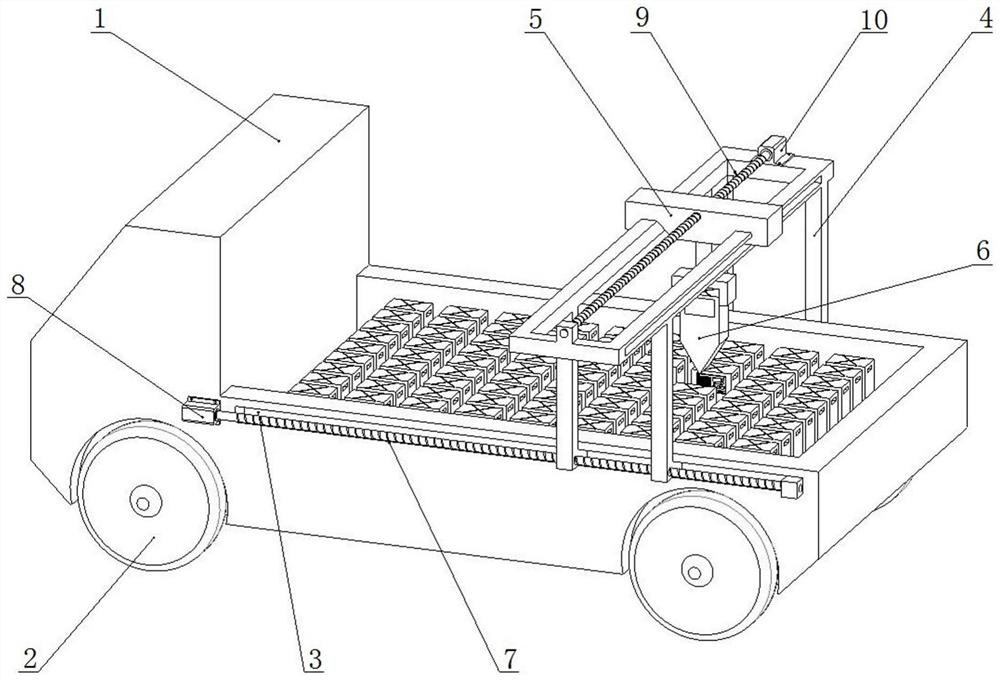
图1为本发明自动放置装置的结构示意图;
图2为本发明自动放置装置抓取控制点模块时的结构示意图;
图3为本发明自动放置装置移动控制点模块时的结构示意图;
图4为本发明自动放置装置下放控制点模块时的结构示意图;
图5为本发明控制点模块的结构示意图;
图6为本发明控制点模块的电控系统图;
图7为本发明无人机测量系统的架构图。
其中:1、车体,2、车轮,3、滑动导轨,4、支架,5、抓取装置,6、控制点模块,61、外壳,62、卡槽,63、无线通讯模块,64、天线模块,7、第一丝杠,8、第一电机,9、第二丝杠,10、第二电机。
具体实施方式
下面将结合附图和具体实施例对本发明进行进一步详细说明。
油气管道工程基坑实景三维测量系统,结合图1至图5所示,包括基站、控制点模块、自动放置装置和无人机。
控制点模块,设置有若干个且分别间隔插装设置在基坑周边。控制点模块与基站进行无线通讯并能够将自身位置信息实时传送到基站。带定位功能的控制点模块,可以提升参数信息获取的效率、提高定位信息的精度及提高本测量系统的自动化程度。
控制点模块包括外壳61、定位模块、无线通讯模块、单片机模块和电池模块,各模块之间的连接关系如图6所示。
外壳61的底端设置为尖锥状;外壳61的侧部设置有卡槽62。
定位模块用于对控制点模块的位置进行定位,定位模块为北斗定位模块。
无线通讯模块63与基站进行无线通讯。无线通讯模块63连接有天线模块64。
单片机模块,接收定位模块传输的位置信息并将位置信息通过无线通讯模块传输至基站。
电池模块用于对控制点模块进行供电。
自动放置装置,内部盛放有若干待插装的控制点模块,并能够在行进过程中接收到基站发出的控制指令后将各控制点模块间隔插装至基坑周边。自动放置装置与基站进行无线通讯并能够将自身位置信息实时传送到基站。
自动放置装置包括车体1、车轮2、车轮驱动机构、支架4、第一驱动机构、抓取装置5、第二驱动机构、车载无线通讯模块、车载定位模块和电控系统模块。
车体1连接设置有用于对待插装的控制点模块进行盛装的车厢。车体1的底端设置有车辆底盘。车轮2设置在车体1底端并通过车轮驱动机构进行移动。具体地,车轮设置在车辆底盘上。车轮驱动机构包括用于驱动车轮转动的驱动电机。
支架4滑动配装在车体1的两侧并通过设置在车体1上的第一驱动机构沿车体侧壁移动。第一驱动机构包括滑动导轨3、滑块、第一丝杠7、第一电机8。车体1的两侧分别开设有滑动导轨3,支架4上设置有滑动配装在滑动导轨3内的滑块。滑动导轨3的内部设置有第一丝杠7,滑块与丝杠螺纹配装,第一丝杠7的一端伸出车体并连接设置有第一电机8。第一电机8驱动第一丝杠7转动,进而驱动支架4和抓取装置5沿着车体移动。
抓取装置5滑动配装在支架4上并通过设置在支架4上的第二驱动机构沿与车体侧壁垂直的方向移动。
抓取装置5包括滑动板、升降机构和抓手。支架4的侧壁上开设有第二滑动槽,滑动板滑动配装在第二滑动槽内。
第二驱动机构包括转动设置在支架4上的第二丝杠9,第二丝杠9与滑动板螺纹配装,第二丝杠9的一端伸出支架连接设置有第二电机10。第二电机10驱动第二丝杠9转动,进而能够驱动滑动板、抓手进行横向移动。
抓取装置5的底端设置有抓手,抓手能够进行升降并对放置在车厢内待插装的控制点模块进行抓取。抓手为液压驱动抓手,在液压缸的驱动下开合。
升降机构为液压缸或气缸,液压缸或气缸的活塞杆端与抓手的顶端相连接。
车载无线通讯模块与基站进行无线通讯,车载无线通讯模块为5G通讯模块。
车载定位模块对自动放置装置的位置进行定位,车载定位模块为北斗定位模块。
电控系统模块接收车载定位模块传输的位置信息并将位置信息通过车载无线通讯模块传输至基站。车轮驱动机构、第一驱动机构、第二驱动机构和抓取装置5的受控端分别连接于电控系统模块的输出端。
自动放置装置采用电力驱动,内部安装有北斗定位模块和5G通讯模块,可以实时与基站进行信息交互,确定自动放置装的置位置,保证控制点模块的安装定位要求。
无人机,在基坑上方飞行拍摄视频,与控制点模块进行实时的数据交换,能够获取各控制点模块的图像信息并能够进行空中三角测量运算,获得有关基坑的测量数据。
无人机包括无人机体以及设置在无人机体内的测量系统。测量系统包括无人机视频获取装置和视频处理装置,结合图7所示。
无人机视频获取装置,在基坑上方多角度对基坑拍摄视频,并通过无人机搭载的无线通讯模块与控制点模块进行实时的数据交换。无人机视频获取装置包括相机单元、定位单元、图像过滤预处理单元。
相机单元,用于对基坑进行拍摄。
图像过滤预处理单元,对抽取的图片进行预处理,将控制点外500像素单位外图像进行裁切过滤,获得基坑图像数据,减少数据量大小,减轻后期数据处理运算量,提升数据处理效率。
视频处理装置,将拍摄的视频进行抽帧处理,并将抽帧图像进行预处理,再进行建模信息处理,生成三维模型,生成基坑工程参数。视频处理装置包括抽帧模块、建模信息处理模块、建模模块和工程参数生成模块。
抽帧模块,用于对经过预处理的视频进行抽帧处理。
建模信息处理模块包括关键点识别提取单元、控制点位置信息对比单元、点云生成单元。
建模模块包括空中三角测量计算单元、模型重建单元、模型渲染单元。
油气管道工程基坑实景三维测量方法,该方法基于油气管道工程基坑实景三维测量系统进行,包括以下步骤:
S1、根据基坑的参数信息,将自动放置装置的行车轨迹输入至自动放置装置的电控系统模块中,自动放置装置按照行车轨迹在基坑的测量边缘及坑上、坑下自动放置带有GPS定位功能的控制点模块。
因油气管道基坑施工挖掘前,根据项目任务书等材料,基坑的挖掘位置坐标信息是已知的,由此本发明自动放置装置的行进轨迹可以通过自动放置装置搭载的无线通讯模块与基站进行信息交互,并根据基坑的位置坐标信息以及基坑要求的挖掘宽度等参数信息,将自动放置装置的行进轨迹提前输入到自动放置装置的电控系统中,达到自动放置装置自动化行进的目的。
步骤S1中,自动放置装置自动放置控制点模块的步骤为:
S101、通过抓取装置5抓取存放在车厢内部的控制点模块6,将控制点模块6抓起后,抓取装置5和控制点模块6在第二驱动机构的驱动下移动至车侧。
具体地,抓取装置5抓取控制点模块6的过程为:升降机构驱动抓手下降,通过电控系统模块控制抓手将车厢内的控制点模块夹持,而后升降机构再驱动抓手上升,实现对控制点模块6的抓取。
S102、自动放置装置接收到放置控制点模块6的指令时,自动放置装置停止前进,抓取装置5在第一驱动机构的驱动下移动至插装位,抓取装置5中的抓手向下运动,带动控制点模块6下压进土层内,达到放置控制点模块的目的。
S103、自动放置装置复位,继续进行下一次抓取控制点模块6的动作。依次完成对各控制点模块6的插装。
S2、控制点模块放置完成后,各控制点模块分别将位置信息反馈至基站,带有GPS定位单元、相机单元及图像预处理单元的无人机在基坑上方飞行并多角度对基坑拍摄视频,相机单元与图像过滤预处理单元、抽帧模块相连接,将拍摄的视频进行抽帧处理,并将抽帧图像进行预处理,再进行建模信息处理,生成三维模型,生成基坑工程参数。
且无人机搭载的无线通讯模块与控制点模块进行实时的数据交换,能够获得无人机飞过控制点模块时抽帧模块输出的图片的位置信息和倾斜角度参数信息,将获得的参数信息输入到建模模块进行空中三角测量运算。
将拍摄的视频进行抽帧处理的方法是用变帧距的抽帧方式,根据采集图像的位置信息,在特定的位置与其余位置进行抽帧的方式不同。在0米、500米、1000米按此数列类推位置处间隔5帧抽取1帧图片,在其余位置间隔30帧抽取1帧图片,在无人机上通过图像过滤预处理单元对抽取的图片进行预处理,图像过滤预处理单元将控制点外500像素单位外图像进行裁切过滤,获得基坑图像数据,减少数据量大小,减轻后期数据处理运算量,提升数据处理效率。
进行抽帧及图像预处理之后的图片,导入到建模信息处理模块中,对预处理后的图像进行建模信息处理的方法包括以下步骤:
S201、进行关键点的提取、自动连接点匹配。
S202、通过计算机图形计算,结合pos信息空三处理,进行区域整体平差、集束调整、多视角影像密集匹配,生成点云,点云构成三维TIN格网,格网结合图片生成白体三维模型。
S203、进行自主纹理映射、纹理贴图包装、细节层次生成,输出赋有纹理的三维模型。
将基坑三维模型输入到工程参数生成模块,获得测量数据包括基坑的断面尺寸、基坑的深度、基坑的坡度等参数。达到对油气管道基坑施工监理过程中对基坑施工进度是否满足前期设计的规范、标准和质量的快速测量及评估的目的。
- 油气管道工程基坑实景三维测量系统及方法
- 一种基于实景三维的油气场站泄漏监测方法及系统