一种油菜移栽机的供苗装置
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及农业机械技术领域,特别是涉及一种油菜移栽机的供苗装置。
背景技术
油菜是一种重要的农业作物,其种植规模很大,因此对其进行机械化种植尤为必要。采用移栽法种植油菜,可有效提升油菜的种植效率,且保证栽植效果,申请人的在先申请CN110393045A公开了一种移栽联合作业机,该专利中,采用基于苗架与移栽机构的移栽方式,作业时,苗架上安放有苗毯,苗架左右移动,使得移栽机构将苗毯上的油菜苗依次分离并栽插入土,该方案中,一方面,苗架结构很大,机具整体的运输、存放均较为困难,且苗架左右移动还需要另外的运动空间,使得机具作业时需要比机具本身更宽的横向空间,另一方面,苗架带着苗毯左右移动会导致机具整体中心不断变化,稳定性欠佳。
专利CN204810941U公开了一种钵苗移栽机全自动供苗装置,其中植株培育在钵内形成链状的钵苗,通过电动机驱动钵盘同步输送带间歇驱动钵苗前进并通过圆盘到将钵苗进行切割投放,实现钵苗供给。该方案中,切割出来的钵苗一般直接投入土地中,且供苗频率由电动机驱动运转,很难保证株距以及栽植的质量。
发明内容
发明目的:为了克服现有技术中存在的不足,本发明提供一种结构紧凑、体积小、株距可控且栽植质量好的油菜移栽机的供苗装置。
技术方案:为实现上述目的,本发明的油菜移栽机的供苗装置,其用于向移栽机构供应油菜苗,油菜苗被条状体串联成为串联体,所述供苗装置包括推送机构与切分机构;所述推送机构包括用于将所述串联体中的油菜苗依次推送至取苗位的推送单元;所述切分机构包括用于切断位于取苗位的油菜苗及其相邻油菜苗之间的连接的割刀;
所述移栽机构、推送机构以及切分机构三者之间通过联动机构建立联动关系。
进一步地,所述串联体还包括育苗钵,所述条状体将所述育苗钵相连;
所述切分机构用于将相邻两个所述育苗钵之间的所述条状体切断。
进一步地,所述移栽机构、推送机构以及切分机构分别具有用于接入动力的第一接入单元、第二接入单元以及第三接入单元,三种接入单元至少一者连接动力源以获取动力,未连接所述动力源接入动力的所述接入单元从其他所述接入单元接入动力。
进一步地,所述推送单元被第一驱动机构驱动沿预设轨迹或按预设运转速度规律运转。
进一步地,所述第一驱动机构为设置在所述第二接入单元与所述推送单元之间的间隙运动机构或非圆齿轮组。
进一步地,所述预设轨迹具有推送段、回程段以及分别将所述推送段与所述回程段的两端连接的第一过渡段与第二过渡段。
进一步地,所述割刀被第二驱动机构驱动沿预设轨迹或按预设运转速度规律运转。
进一步地,所述第二驱动机构为设置在所述第三接入单元与所述割刀之间的间隙运动机构或非圆齿轮组。
进一步地,所述割刀能够作靠近切割位置以及远离切割位置的运动。
进一步地,还包括供所述串联体在其内运动的通道,所述取苗位位于所述通道的后端。
有益效果:本发明的油菜移栽机的供苗装置,其通过将推进机构及切分机构与移栽机构进行联动,可对串联体进行定距推进以及切分,将油菜苗依次供给移栽机构,且栽植行距可调,移栽机构的运转频率可决定栽植行距,运行稳定性高。
附图说明
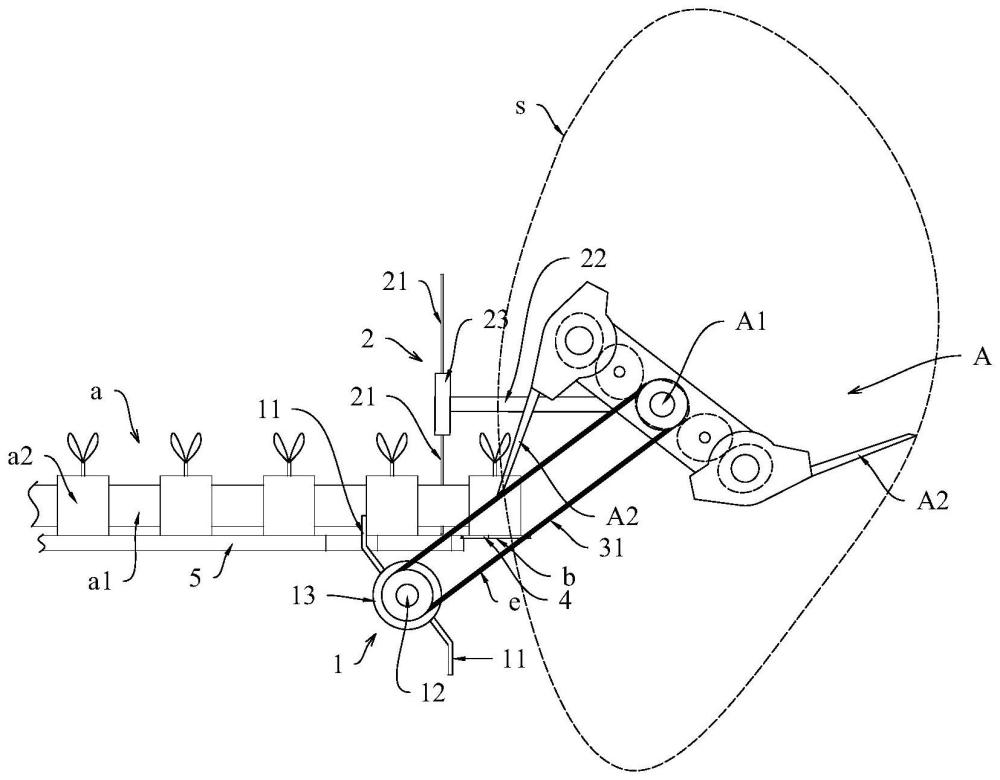
图1为实施例1中油菜移栽机的供苗装置的侧视图;
图2为实施例1中油菜移栽机的供苗装置的俯视图;
图3为实施例2中油菜移栽机的供苗装置的侧视图;
图4为实施例2中一种推送机构的结构图;
图5为实施例2中一种切分机构的结构图;
图6为实施例2中第二种推送机构的结构图;
图7为实施例2中第三种推送机构的结构图;
图8为实施例3中推送机构的结构图;
图9为实施例3中切分机构的结构图;
图10为实施例4中切分机构与通道的组合图;
图11为实施例5中切分机构与通道的位置示意图;
图12为实施例5中切分机构与通道的第一状态图;
图13为实施例5中切分机构与通道的第二状态图;
图14为实施例5中切分机构与通道的第三状态图。
图中:A-移栽机构;A1-第一接入单元;A2-取苗针;A3-旋转座体;a-串联体;a1-条状体;a2-育苗钵;b-取苗位;c-槽轮机构;d-棘轮间歇机构;d1-曲柄摆动导杆机构;d11-摇杆;d12-曲柄;d2-第一棘爪;d3-机构座体;d4-棘轮;d5-第二棘爪;s-栽植轨迹;1-推送机构;11-推送单元;12-第二接入单元;13-第一转动座;14-第一非圆齿轮组;15-垂直导向单元;16-平行导向单元;17-转动杆;18-滑套;19-第一弹簧;2-切分机构;21-割刀;22-第三接入单元;23-第二转动座;24-第二非圆齿轮组;251-固定座;252-滑动座;253-连接杆;254-推动杆;255-保持弹簧;256-滑动推杆;257-转动件;3-联动机构;31-同步带机构;32-伞齿轮机构;4-容置机构;41-槽口;42-弹性机构;43-主动开口机构;5-通道。
具体实施方式
下面结合附图对本发明作更进一步的说明。
如图1-2所示的油菜移栽机的供苗装置,其用于向移栽机构A供应油菜苗,油菜苗被条状体a1串联成为串联体a;油菜苗可以直接被条状体a1串联,但是在优选的实施例中,所述串联体a还包括育苗钵a2,油菜苗置于育苗钵a2内,所述条状体a1将所述育苗钵a2相连,育苗钵a2内装有土壤或其他培养介质。
此处,育苗钵a2以及条状体a1均为可降解材料制成,如可采用特制的纸制成,移栽机构A取苗移栽时连带装载油菜苗的育苗钵a2一起移栽,并将育苗钵a2埋入土壤,如此可有效减少取苗步骤,且移栽后不会产生残余品,不会有要对残余平进行后处理的麻烦。育苗钵a2随着油菜苗入土后,育苗钵a2在土壤中降解,不会影响后续油菜根系生长。
移栽机构A包括旋转座体A3以及安装在旋转座体A3端部的取苗针A2,取苗针A2沿预定栽植轨迹s运动,以实现取苗与移苗入土的作业。旋转座体A3上可以设置一个取苗针A2,优选地设置两个取苗针A2,如此在旋转座体A3的一个转动周期内移栽机构A能够实施两次取苗栽植流程,移栽机构A的具体结构可参照插秧机的插秧机构,此处不多赘述。
基于此,所述供苗装置包括推送机构1与切分机构2。其中,推送机构1包括用于将所述串联体a中的油菜苗依次推送至取苗位b的推送单元11,所述移栽机构从所述取苗位b获取油菜苗;切分机构2包括用于切断位于取苗位b的油菜苗及其相邻油菜苗之间的连接的割刀21,也即用于将相邻两个所述育苗钵a2之间的所述条状体a1切断。
该结构中,通过条状体a1将油菜苗串联成串联体,并在供苗时将条状体a1中的油菜苗单独分切出来供移栽机构A供苗,移栽机构A可根据其自身的运转频率决定移栽株距,如此油菜苗之间的株距不受限于其在串联体a上的间距,移栽参数可按需调节,灵活性大为增加。
另外,相比于使苗架来回移动的移栽方案,采用上述结构,不仅运行稳定,而且体积小巧,可使机具小型轻量化。
优选地,所述移栽机构A、推送机构1以及切分机构2三者之间通过联动机构3建立联动关系。通过设置联动机构3建立三者的联动关系,可构建三者之间稳定的运行节拍,相比于利用执行元件对三者分别进行控制并利用控制器使三者协同运动,通过联动机构3建立三者的联动关系显然成本更低,实现更方便,且运行更稳定。
优选地,所述移栽机构A、推送机构1以及切分机构2分别具有用于接入动力的第一接入单元A1、第二接入单元12以及第三接入单元22,本实施例中三种接入单元均为转轴,三种接入单元至少一者连接动力源B以获取动力,未连接所述动力源B接入动力的所述接入单元从其他所述接入单元接入动力。上述联动机构3包括动力源B与接入单元之间的连接机构,也包括接入单元之间的连接机构。
优选地,所述推送单元11被第一驱动机构13驱动沿预设轨迹或按预设运转速度规律运转。此处,按预设运转速度规律运动可以是间歇运动,也即,推送单元11一会运动一会相对于机座静止,此时,第一驱动机构13为间歇运动机构。在一种实施例中,推送单元11为轮状,其四周具有推送齿11a,第一间歇机构13与移栽机构A配合运转,移栽机构A每取走一株油菜苗后,所述第一间歇机构13使所述推送单元11转动预设角度,推送单元11将当前最前方的育苗钵a2推送至取苗位b。
按预设运转速度规律运动还可以是非对称连续运动,即推送单元11的运动可以分成两个阶段,其中一个阶段为推进段,另一个阶段为回程段,其中,推送单元11在回程段的平均速度小于其在推进段的平均速度。
上述预设轨迹为规划好的轨迹,如预设轨迹可以是圆周轨迹或其他形状的轨迹,预设轨迹使推送单元11在将位于取苗位b邻位的育苗钵a2推送至取苗位b的过程中保持接触状态,而在育苗钵a2到达取苗位b后其与育苗钵a2脱离,并在沿着预设轨迹继续运动的过程中,推送单元11能够回到取苗位b邻位并对该位置的育苗钵a2接触。
优选地,所述割刀21被第二驱动机构23驱动沿预设轨迹或按预设运转速度规律运转。
与上述推送单元11的运动规律类似,割刀21可以做间歇运动,也可以做非对称连续运动。割刀21在移栽机构取苗前或移栽机构取苗过程中对条状体a1进行切割,以将取苗位b上的育苗钵a2分离出来。优选地,移栽机构开始作用于育苗钵a2或油菜苗或育苗钵a2内的泥土时,割刀21作用于条状体a1并迅速将条状体a1切断。
优选地,所述取苗位b处设置有容置机构4,所述容置机构4为上下贯通结构,且其后侧具有上下贯穿的槽口41。
优选地,所述容置机构4包括两个能够相对打开的半体41,两个所述半体41之间通过弹性机构42或主动开口机构43连接。
优选地,还包括供所述串联体a在其内运动的通道5,所述取苗位b位于所述通道5的后端。
实施例1
如图1与图2所示,本实施例中,推送机构1包括第一转动座13,推送单元11安装在第一转动座13上;切分机构2包括第二转动座23,所有割刀21固定在第二转动座23上;取苗针A2、推送单元11以及割刀21三者的数量相等,图示实施例中,三者的数量分别为两个,旋转座体A3、第一转动座13、第二转动座23三者等角速度同步转动,如此,取苗针A2、推送单元11以及割刀21三者能够同频率作用于各自的作用对象。
为了实现旋转座体A3、第一转动座13、第二转动座23三者同步等角度运转,连接第一转动座13的第二接入单元12以及连接旋转座体A3的第一接入单元A1之间通过同步带机构31等同步机构连接,连接第二转动座23的第三接入单元22与第一接入单元A1之间通过伞齿轮机构32建立传动关系。
具体过程为:s1)推送单元11推动末端的育苗钵a2至取苗位b,然后推送单元11脱离育苗钵a2;s2)割刀21切断末端的育苗钵a2后侧的条状体a1;s3)取苗针A2插入育苗钵a2内,并带着育苗钵a2移入土中。上述过程可按照s1)、s2)、s3)的顺序执行。还可以是s1)先执行,s2)发生在s3)执行的过程中,也即取苗针A2插入育苗钵a2内后,割刀21切断末端的育苗钵a2后侧的条状体a1,该过程相比于依次按照s1)、s2)、s3)的顺序执行方案的好处在于,按照s1)、s2)、s3)的顺序执行时先切分出来的育苗钵a2可能会在取苗针A2取苗之前由于机具的颠簸掉落或改变姿态,而s2)发生在s3)执行的过程中能够解决该问题,此后取苗针A2继续带着独立的育苗钵a2移栽入土。
实施例2
如图3所示,本实施例中,与实施例1中类似,推送单元11包括第一转动座13以及安装在第一转动座13上的推送单元11;切分机构2包括第二转动座23,所有割刀21固定在第二转动座23上;所不同的是,推送单元11、割刀21及取苗针A2三者的数量不一定相等,第一转动座13与第二转动座23两者中至少有一者是由间歇运动机构推动运转,间歇运动机构使得推送单元11或割刀21做间歇运动,也即按预设运转速度规律运转。
间歇运动机构可以是如图4、5所示的槽轮机构c或者如图6、7所示的棘轮间歇机构d,如图6所示的棘轮间歇机构d包括机构座体d3,机构座体d3上安装有曲柄摆动导杆机构d1与棘轮d4,曲柄摆动导杆机构d1的摇杆d11上安装有第一棘爪d2,机构座体d3还安装有第二棘爪d5,第一转动座13或第二转动座23相对于棘轮d4固定安装。曲柄摆动导杆机构d1的曲柄d12由第二接入单元12或第三接入单元22驱动运转,如此,第二接入单元12或第三接入单元22连续转动,可使第一转动座13或第二转动座23做间歇运动,调整好第一接入单元A1、第二接入单元12、第三接入单元22的转速关系以及初始相位,可实现上述实施例1中s1)、s2)、s3)的执行顺序,或者s1)先执行、s2)发生在s3)执行的过程。
上述曲柄摆动导杆机构d1也可由其他连杆机构替代,如可以是图7所示的曲柄摇杆机构,第一棘爪d2安装在其摇杆上,曲柄摇杆机构的曲柄连接接入单元(第二接入单元12或第三接入单元22)。
实施例3
作为实施例1或实施例2中推送机构1的替代,本实施例中,推送单元11做非对称连续运动,一种实施方式为:推送机构1包括第一转动座13以及安装在第一转动座13上的推送单元11,第二接入单元12通过第一非圆齿轮组14将动力传递至第一转动座13,如图8所示,第一非圆齿轮组14包括两个相互啮合的非圆齿轮,两个非圆齿轮分别相对于第二接入单元12以及第一转动座13固定安装,如此,可实现推送单元11在推送段运动速度快,而在回程段运动速度慢,推送机构1可在每次移栽机构A取苗后将育苗钵a2快速推送到位。
同理,作为实施例1或实施例2中切分机构2的替代,切分机构2包括第二转动座23以及安装在第二转动座23上的割刀21,第三接入单元22通过第二非圆齿轮组24将动力传递至第二转动座23,如图9所示,第二非圆齿轮组24包括两个相互啮合的非圆齿轮,两个非圆齿轮分别相对于第三接入单元22以及第二转动座23固定安装,如此,可实现割刀21在推送段运动速度快,而在回程段运动速度慢,切分机构2可在每次执行切分作业时快速将带状体a1切断。
实施例4
作为实施例1或实施例2中推送机构1的替代,本实施例中,推送单元11沿预设轨迹运动,图10所示的实施例中,推送单元11沿方形轨迹运动,如此,推送单元11沿着轨迹的上侧(推送段)运动时,其能够对育苗钵a2进行推送,推送到位后,推送单元11沿着轨迹的前侧(第一过渡段)向下运动脱离育苗钵a2,而后沿着轨迹的下侧(回程段)返回,最后沿着轨迹的后侧(第二过渡段)向上运动到达下一个育苗钵a2的后侧。采用该方案,推送单元11推送育苗钵a2时,其与育苗钵a2的接触面积始终不变,推送效果好。
为了实现推送单元11沿该轨迹运动,推送机构1包括垂直导向单元15、平行导向单元16;平行导向单元16能够沿着垂直导向单元15滑动且其滑动在上下限位之间进行;推送单元11能够沿着平行导向单元16滑动,且其滑动在前后限位之间进行。推送机构1还包括连接第二接入单元12的转动杆17,推送单元11上转动安装有滑套18,转动杆17与滑套18滑动配合,且转动杆17上串套有使滑套18具有远离转动杆17转动中心运动趋势的第一弹簧19。通过上述结构,可实现推送单元11沿方形轨迹运动。
实施例5
本实施例中,如图11所示,切分机构2的割刀21能够作靠近切割位置以及远离切割位置的运动,具体地,第三接入单元22接入的动力可使割刀21按照如下t1)-t4)流程循环运动:t1)靠近切割位置;t2)在切割位置对条状体a1进行切割;t3)远离切割位置。
本实施例中,第三接入单元22为连续转动的转轴,切分机构2的具体结构为:切分机构2除了割刀21外还包括相对于通道5固定的固定座251,还包括沿着固定座251滑动的滑动座252,滑动座252上安装有切割组件,切割组件包括两个上述割刀21,还包括连接两个割刀21的连接杆253,连接杆253相对于滑动座252滑动安装,且两者的相对滑动方向垂直于滑动座252自身相对于固定座251的滑动方向;切分机构2还包括连接两个连接杆253的两个推动杆254,两个推动杆254均连接相对于滑动推杆256,滑动推杆256相对于滑动座252的滑动方向与滑动座252相对于固定座251的滑动方向一致,两个推动杆254可在第一夹角状态与第二夹角状态之间切换,以使得两个割刀21在剪切状态与打开状态之间切换;滑动座52上具有对推动杆254施加作用力的保持弹簧255,保持弹簧255使两个推动杆254保持在第二夹角状态。第三接入单元22上安装有转动件257,转动件257上具有销轴,滑动推杆256上形成有供销轴在其内运动的滑槽。
初始时,如图12所示,割刀21处于远离切割位置的位置,销轴也处于最远离切割位置的位置,第三接入单元22转动的第一阶段,通过滑动推杆256推动整个滑动座252相对于固定座251滑动,此阶段中,两个推动杆254在第二夹角状态不动,当滑动座252到达限位(如图13所示),第三接入单元22继续转动到达第二阶段,此阶段中,滑动座252相对于固定座251固定,也即割刀21到达切割位置,滑动推杆256在销轴的作用下挤压两个推动杆254,使两者逐渐到达第一夹角状态,两个割刀21闭合(如图14所示),实现剪切,两个割刀21闭合时,销轴到达最靠近切割位置的位置。随后,第三接入单元22继续转动可使两个割刀21打开,切分机构2回到初始状态。
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种植物纤维地膜自动铺膜移栽机链式纸钵苗分苗供苗装置
- 油菜基质块苗移栽机双向递进式送苗装置